基于MEA-BP神经网络的开关磁阻电机静态电磁特性建模
2022-08-31王成敏王爱元姚晓东殷世雄李吉程
王成敏,王爱元,2,姚晓东,2,殷世雄,李吉程
(1.上海电机学院 电气学院,上海 201306;2.佛山市高明区明戈新型电机电控研究院,广东 佛山 528500)
0 引 言
开关磁阻电机(SRM)是一种新型的调速电机。它具有结构简单、成本低廉、调速范围宽、系统可靠性高等优点,目前已成功应用于电动汽车驱动、通用工业、家用电器和纺织机械等各个领域。建立精确的SRM模型是分析、预测电机性能和控制电机的基础。但由于SRM特殊的双凸极结构,其磁链电感等参数为电流以及转子位置角的高度非线性函数,建立SRM的磁链特性和转矩特性的模型相对困难。国内外研究学者对此提出了不少的建模方法,大致分为线性建模法、准线性建模法、有限元分析法[1-2]和智能建模法[3-5]等。一般的线性建模法和准线性建模法减少了繁琐的数学公式推导和相关的计算,但忽略了由于定子与转子之间相对位置的变化而产生的互感,计算与实际的结果相差较大[6]。智能建模法中应用较多的是以反向传播(BP)神经网络为基础的建模方法。神经网络原则上可以实现任何复杂的非线性映射,且具有较强的学习能力。通过映射的输入和输出建立相关的模型,不依靠关于SRM的任何先验经验和理论知识,由此得到的模型具有较好的鲁棒性和泛化性[7]。
但标准的BP神经网络在训练过程中速度较慢且容易陷入局部极值点,不容易得到全局最优点。在现有的基础上,提出一种基于思维进化算法(MEA)改进BP神经网络的SRM建模方法。通过MEA优化BP神经网络的初始权值和阈值来改善标准BP神经网络训练过程中的不足,使算法的精度和速度相对有所提高。对ANSYS Maxwell软件建立的SRM模型进行有限元分析,对得到的磁链和转矩的相关数据进行神经网络训练,对比训练好的模型的预测值与实测值以及模型优化前后的均方误差,验证了该建模方法的可行性与泛化性。
1 MEA-BP神经网络
1.1 BP神经网络
BP神经网络是一种按照误差逆向传播算法训练的多层前馈神经网络,在训练过程中不断收集系统产生的误差,并将这些误差返回到输出值,之后用这些误差来调整神经元的权重,这样生成一个可以模拟出原始问题的人工神经网络系统。BP神经网络具有任意复杂的模式分类能力和优良的多维函数映射能力,无需事先确定输入输出之间映射关系的数学方程,仅通过自身的训练,学习某种规则,在给定输入值时得到最接近期望输出值的结果。结构上,BP网络具有输入层、隐藏层和输出层,如图1所示;本质上,BP算法以网络误差平方最小为目标函数、采用梯度下降法来计算目标函数的最小值,因此其存在着收敛速度慢、容易陷入局部极值点得不到全局最优点的不足。
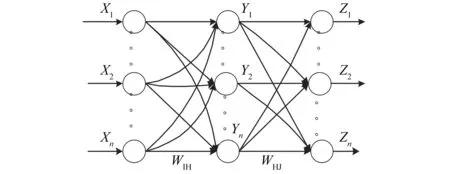
图1 神经网络结构图
1.2 MEA基本思想
MEA由孙承意等[8]提出,旨在解决进化算法(EC)存在的问题和缺陷,如早熟以及收敛速度慢等。MEA延续了遗传算法的一些基础概念定义,如“个体”“群体”“环境”等。同时在此基础上引入了新的概念定义,如“子群体”“公告板”“趋同”“异化”等。
1.3 MEA-BP神经网络
BP神经网络通过反复训练来调整网络中的权值和阈值,使输出值逼近期望值。初始权值和阈值的选择对BP神经网络的收敛和精度有着直接影响,选择不当会使其收敛速度慢且容易陷入局部最优。因此利用MEA极强的全局搜索能力对BP神经网络的权值和阈值进行优化。首先按照BP神经网络的拓扑结构,为网络各层的权值和阈值进行随机编码,按照思维进化一直迭代寻找出最优解,利用所选得分函数进行解码,并将其代入BP神经网络的权值和阈值。
设计步骤流程图如图2所示。首先导入输入输出数据集,采用随机法随机分配训练集和测试集,同时通过将数据归一化,减少变量差异较大对模型性能的误差影响。根据BP神经网络的拓扑结构确定个体的数量。然后选取随机顺序的训练集的均方误差的倒数作为每一个体与种群的得分函数。利用MEA不断迭代,最终得到最优个体进行解析,并以此作为BP神经网络的初始权值和阈值,从而开始训练BP神经网络。根据训练后的模型,输入测试集的输入数据,反归一化后得到预测的测试集的输出数据,与测试集的输出数据进行对比。
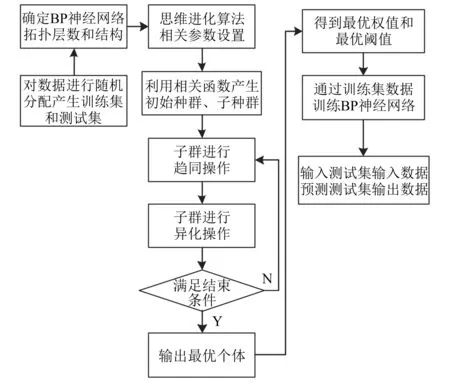
图2 思维进化设计步骤
2 SRM电磁场有限元分析
样本数据的精确性决定着神经网络建模的可靠性。通过ANSYS Maxwell软件搭建SRM模型并进行有限元分析,得到了SRM样机的磁链特性和转矩特性的相关数据,作为BP神经网络训练的样本。
本文以一台四相8/6极SRM为例,样机参数如表1所示。根据表1参数建立SRM样机的二维电磁场有限元模型。通过有限元计算得到SRM样机的磁链特性曲线如图3所示,相电流参数变化范围为0~10 A;转子位置角的参数变化范围为0°~22.5°,间距为2.5°。
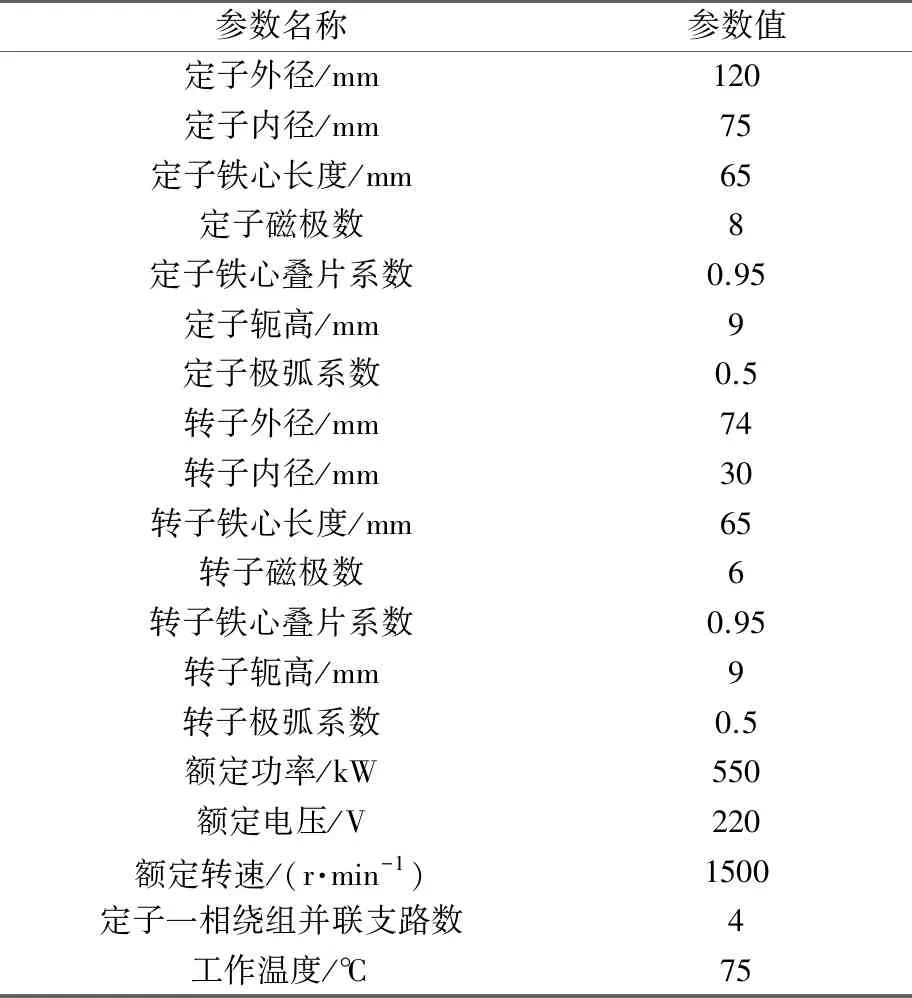
表1 四相8/6极SRM样机参数
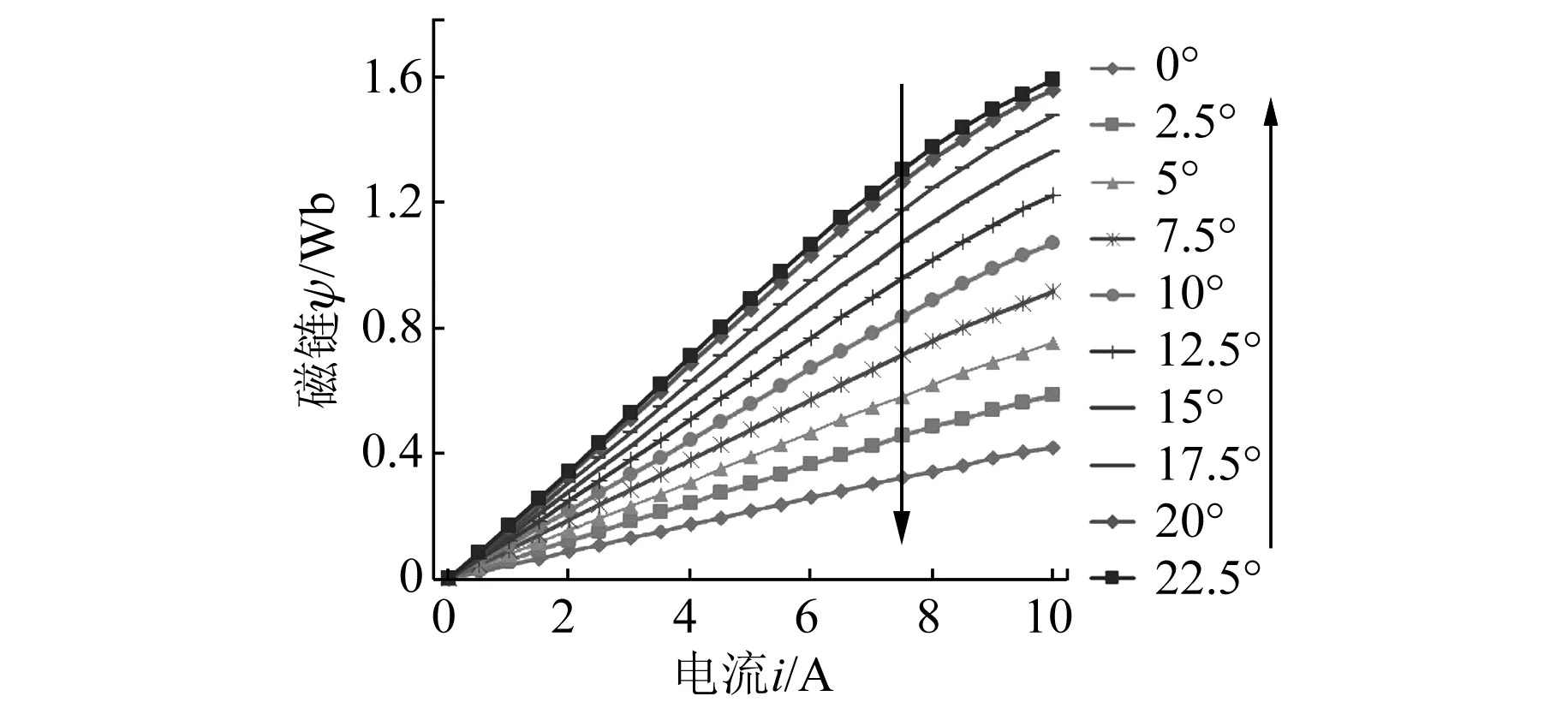
图3 SRM样机磁链特性曲线
通过有限元计算得到SRM样机的转矩特性曲线如图4所示,相电流参数变化范围为0~10 A,间距1 A;转子位置角的参数化范围为0°~22.5°,间距为2.25°。
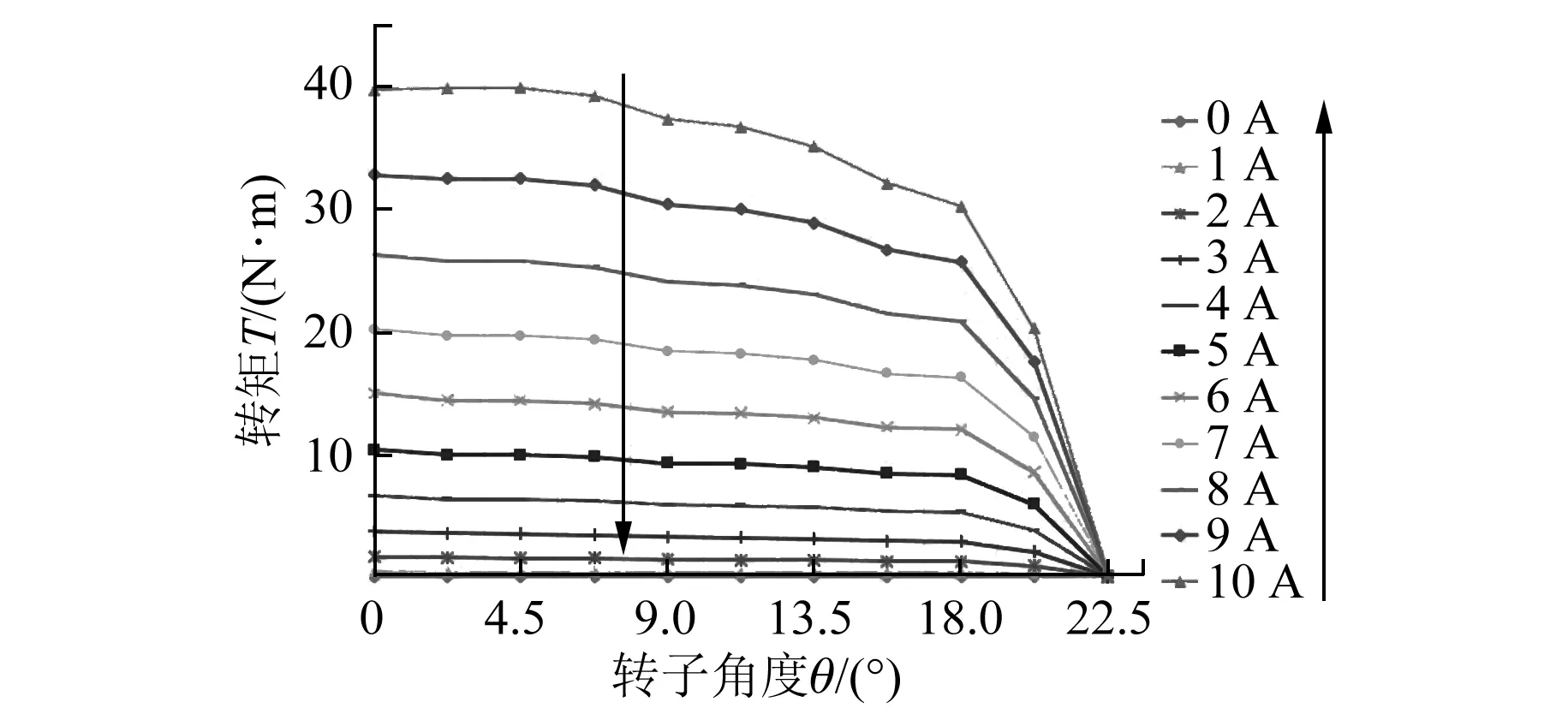
图4 SRM样机转矩特性曲线
3 SRM神经网络建模与分析
3.1 MEA-BP神经网络建模
BP神经网络采用三层拓扑结构,输入为电流和转子位置角即输入层节点数为2,输出为磁链或者转矩即输出层节点数为1,隐含层节点数设置为5,故选择的神经网络拓扑结构为2-5-1,如图5所示,共有15个权值以及6个阈值,个体编码长度为21。MEA算法参数设置为:种群大小为200,优胜子种群个数为5,临时子种群个数为5,子群体大小为20,迭代次数为10。
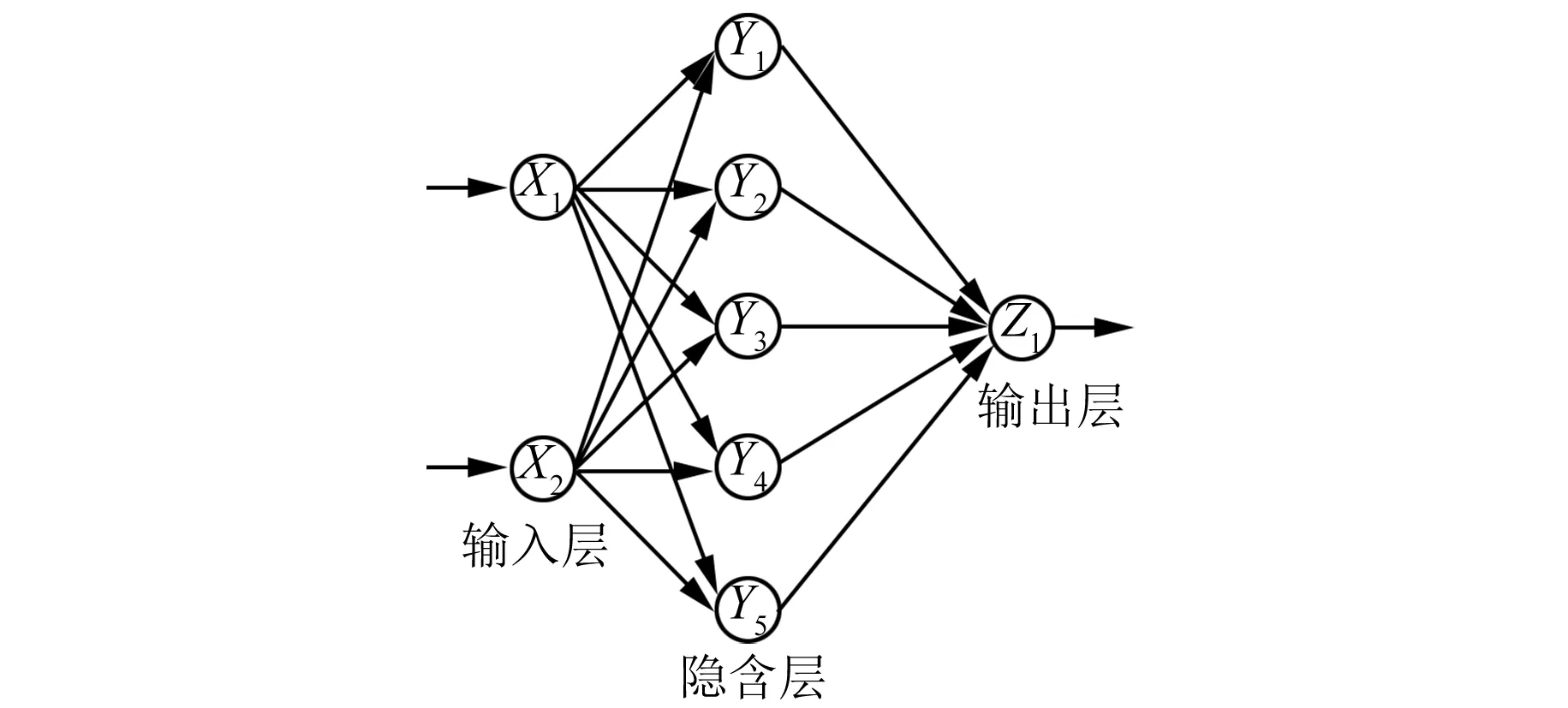
图5 MEA-BP神经网络模型
3.2 磁链特性模型
磁链是绕组电流和转子位置角的函数,以电流和转子位置角作为BP神经网络的输入,磁链作为BP神经网络的输出,根据有限元计算得到的数据进行训练和测试。
共400组样本数据,随机分配350组数据作为训练集进行神经网络训练以及50组数据作为测试集进行训练后的测试。
图6为磁链数据的回归分析图,回归直线对观测值的拟合度越好说明正相关性越强,所有的样本点几乎都在零误差线附近,说明训练后的磁链特性模型是准确可靠的。
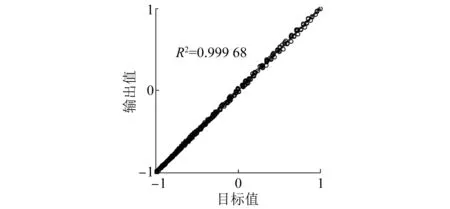
图6 磁链数据回归分析
利用训练好的MEA-BP神经网络预测函数输出,与标准BP神经网络预测结果的对比如图7所示。由对比结果可以看出通过MEA算法优化后的神经网络磁链特性模型具有更高的精度。
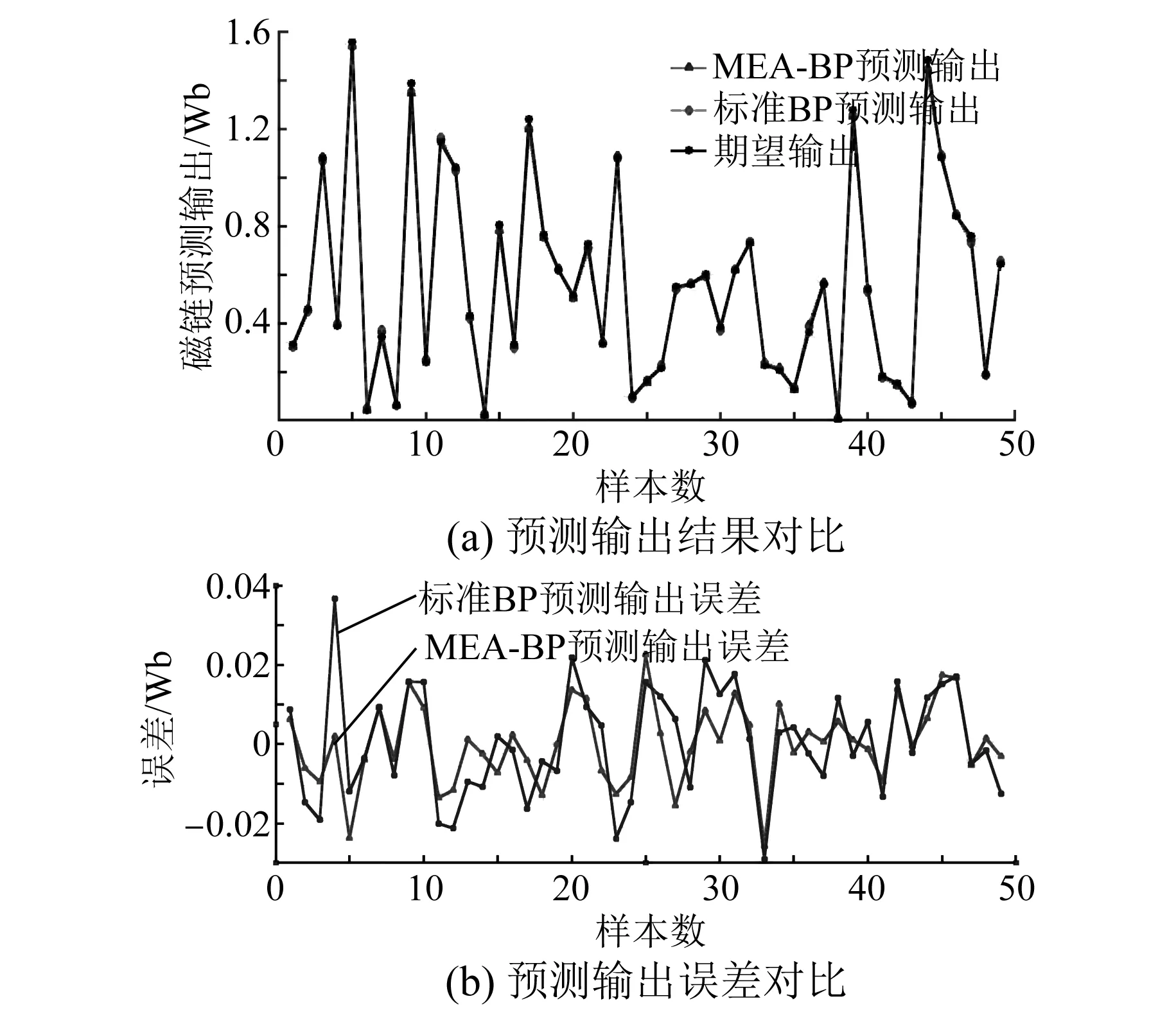
图7 磁链数据预测结果对比
为了更好地体现所建立模型的泛化能力,另外绘制了一条通过该模型预测的转子位置角为6°时的曲线(由下至上第4条)进行对比,如图8所示,证明了该模型具有较强的泛化能力。
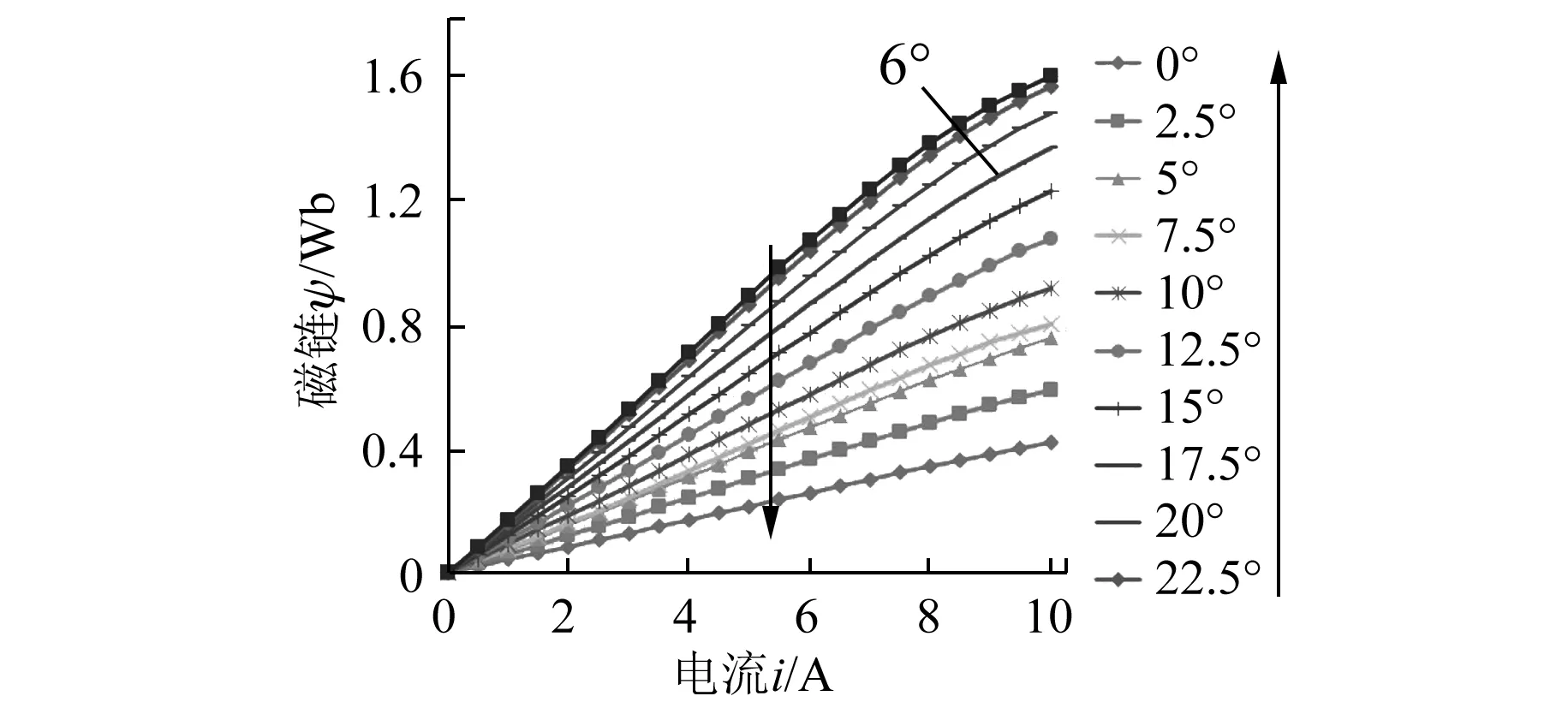
图8 MEA-BP模型预测数据
3.3 转矩特性模型
转矩是转子位置角和电流的函数,以电流和转子位置角作为神经网络的输入,转矩作为神经网络的输出。
共440组样本,随机分配390组数据作为样本集进行训练以及50组数据作为测试集进行训练后的测试。
图9为转矩数据的回归分析图,回归直线对观测值的拟合度越好说明正相关性越强,所有的样本点几乎都在零误差线附近,说明训练后的转矩特性模型是准确可靠的。
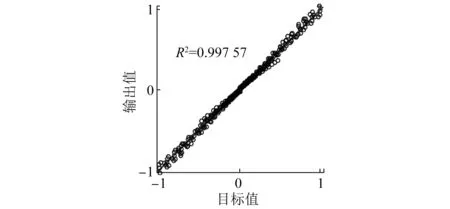
图9 转矩数据回归分析
利用训练好的MEA-BP神经网络预测函数输出,与标准BP神经网络预测结果的对比如图10所示。由对比结果可以看出通过MEA算法优化后的神经网络转矩特性模型具有更高的精度。
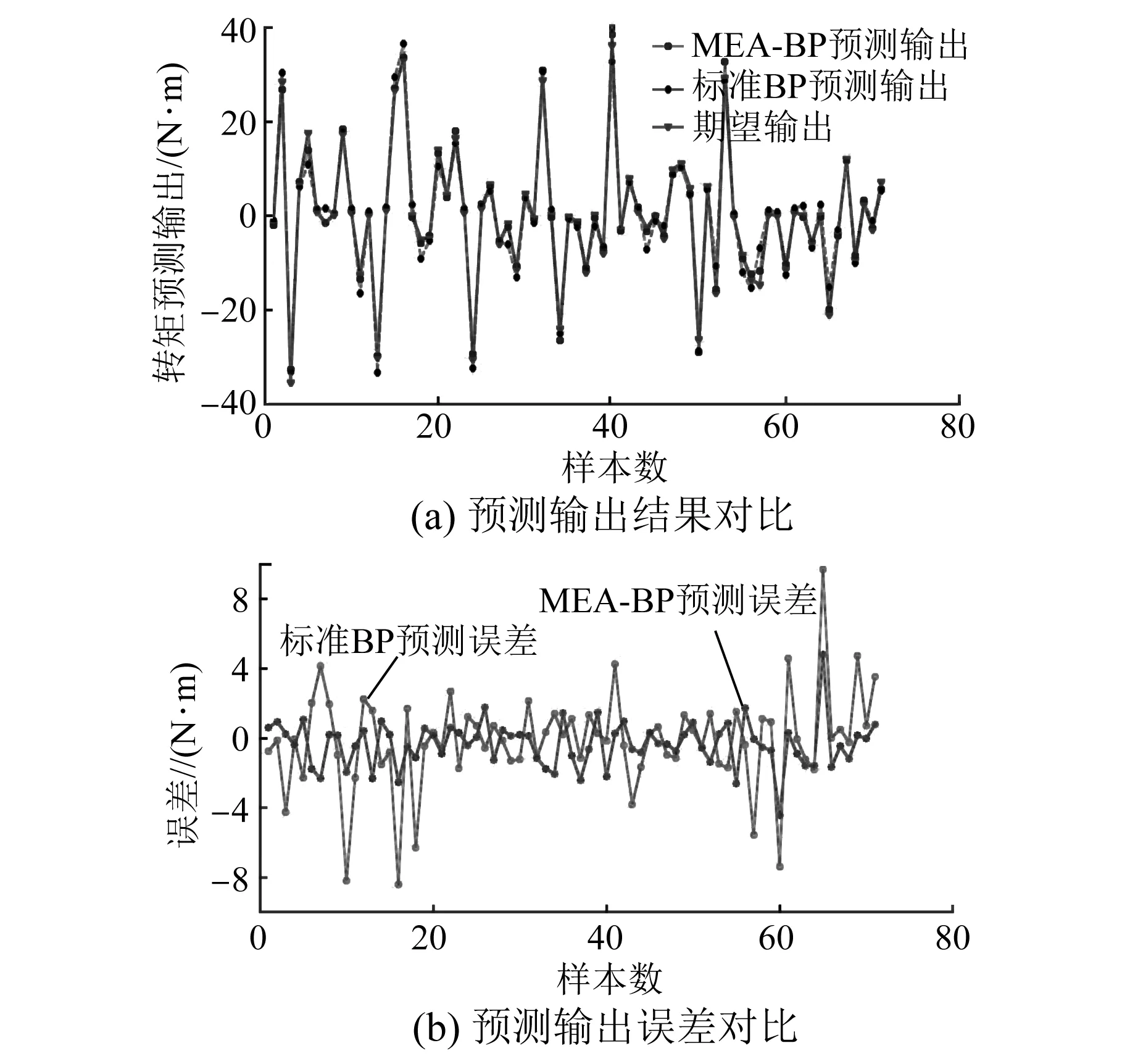
图10 转矩数据预测结果对比
同时也绘制了一条通过该模型预测的电流为11 A时的曲线与仿真数据进行对比,如图11所示(从上至下第一条),证明了该转矩特性的模型具有较好的泛化能力。
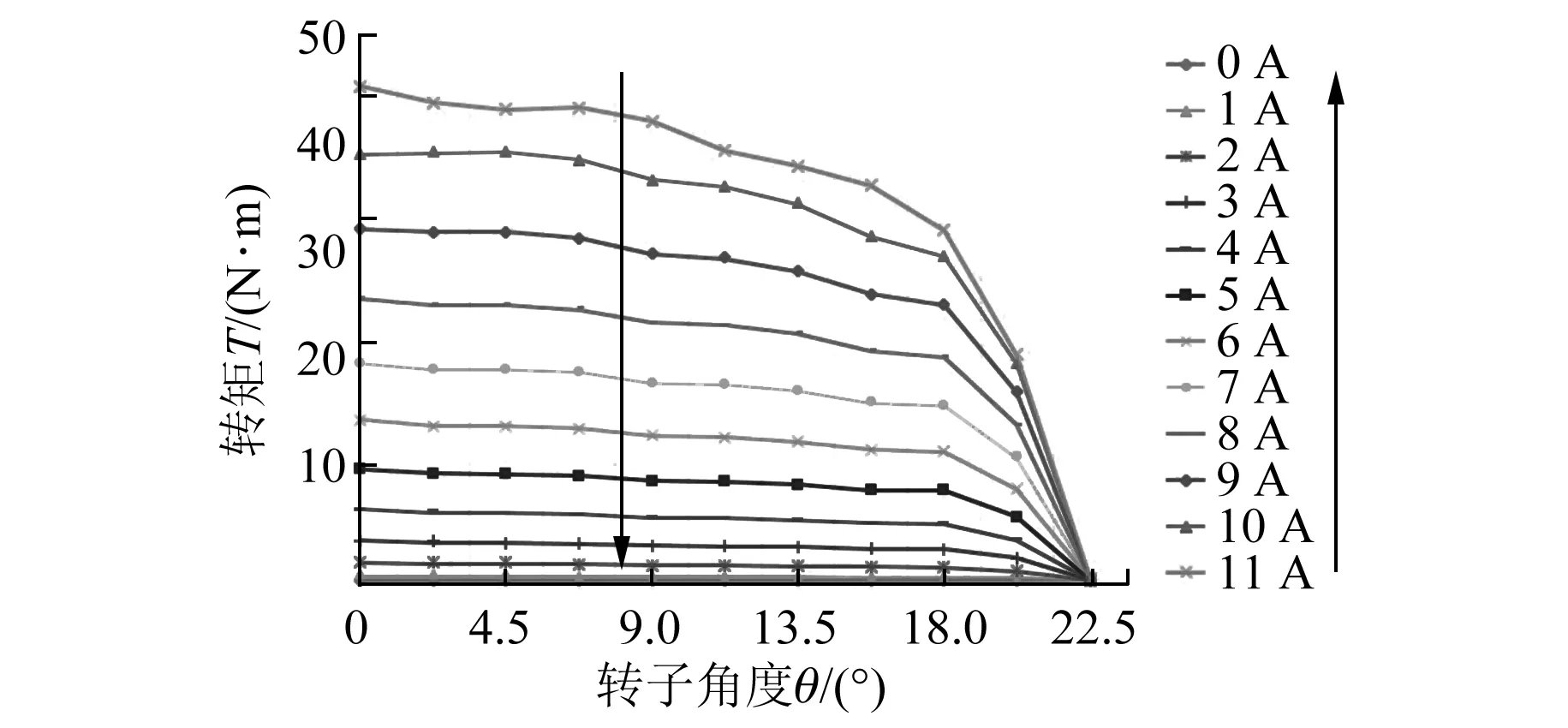
图11 MEA-BP模型预测转矩数据对比
4 结 语
针对SRM运行时磁路的强非线性和高饱和性,利用BP神经网络的非线性映射能力对其进行建模。通过MEA算法对标准BP神经网络的不足进行了改进,并将优化后的模型应用在SRM建模中。对磁链和转矩数据进行了训练,由此建立了磁链模型和转矩模型。通过多方面的数据图表对比,验证了该建模方法的精度比标准BP神经网络建模方法有了很大的提高,且通过额外预测数据验证了该模型具有较强的泛化能力。
