直线同步电动机磁悬浮系统区间二型模糊控制的研究*
2022-08-31蓝益鹏
张 萌,蓝益鹏
(沈阳工业大学 电气工程学院,辽宁 沈阳 110870)
0 引 言
数控机床直线同步电动机磁悬浮驱动系统凭借其高精度、高效率、无摩擦以及无需润滑等优点受到广泛关注[1]。可控励磁直线同步电动机(CELSM)磁悬浮驱动系统结构简单,但在驱动过程中,不确定的外部影响因素,比如负载扰动及直线电动机中特有的端部效应,会影响系统控制。同时其复杂的数学模型也不利于对系统实现稳定的控制。故选取合适的控制策略来改善CELSM磁悬浮驱动系统的性能尤为重要。
在常见的控制策略中,PI控制器应用广泛[2],但其对数学模型复杂的磁悬浮系统无法精准控制。鲁棒控制作为现代控制策略之一,可应用于磁悬浮系统,使得系统稳定运行[3]。神经网络控制在处理磁悬浮系统时也具有良好的控制效果[4]。模糊控制因无需具体数学模型、有助于解决复杂系统的非线性问题而受到欢迎[5]。文献[6]便将模糊控制应用于磁悬浮系统中,有效地提高了系统的性能。但模糊控制规则一般源于研究人员的总结,对不同的个体不可避免地存在差异性,无法达到完善合理,故传统的模糊控制在处理非线性和外部干扰较强的复杂系统时存在局限性。为了改进传统模糊控制的不足,二型模糊集(T2FS)被提出,其隶属度为一型模糊集,这使得模糊控制在处理系统不确定问题时有了进步[7]。随着研究对象逐渐变得复杂,二型模糊控制的计算过程也变得缓慢。为了提高运算速度,研究人员定义了区间二型模糊集(IT2FS),其次隶属度函数值恒为1。自此区间二型模糊逻辑系统得到了较快发展,不少学者将其应用于控制研究中,取得了丰硕成果[8]。文献[9]中研究人员在研究移动机器人时,采用了区间二型模糊逻辑进行控制,研究表明,在面临扰动和参数不确定性问题时,此控制器表现优异,鲁棒性好。Huang等[10]在研究移动两轮倒立摆的自主运动问题时,同样构建了区间二型模糊控制器,验证表明,区间二型模糊控制能够更好地应对建模的不确定性。
综上所述,区间二型模糊控制策略适于处理具有非线性和不确定性的系统,且控制效果优异。本文依据区间二型模糊逻辑系统的构成及其运算步骤,选取合适的输入变量、规则库、推理方式、降阶解模糊算法,设计区间二型模糊控制器,用于控制CELSM磁悬浮驱动系统。仿真验证表明此控制器能明显提高系统的起动性能及抗干扰能力。
1 直线同步电动机控制原理及数学模型
1.1 CELSM磁悬浮系统结构
直线同步电动机磁悬浮系统主要由CELSM、运动平台、辅助导轨等部分组成,其结构如图1所示。其中运动平台上装有电枢绕组和动子铁心,辅助导轨及装有励磁绕组的定子铁心则安装在平台基座上。
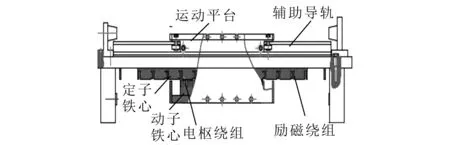
图1 磁悬浮系统结构
1.2 CELSM磁悬浮系统的控制原理
要实现对系统的稳定控制需要一悬浮力与平台重力平衡。因此,对电动机励磁绕组施加直流电,此时气隙中的励磁磁场与动子铁心作用,便可产生悬浮力,此力可通过调节励磁电流大小而改变。故励磁电流为直线同步电动机磁悬浮系统的主要控制对象。此外,平台沿水平方向运动,需要一水平推力。对电枢绕组施加三相交流电,产生的行波磁场与励磁磁场作用,可产生此电磁推力[11]。
1.3 CELSM磁悬浮系统的数学模型
为了简化系统的数学模型,假设如下条件:忽略端部效应及铁心饱和,不计铁心损耗且磁极无阻尼绕组,并以三相正弦对称交流电通入电枢绕组[12]。可得电枢绕组在d、q轴的电压分量ud、uq及励磁回路的电压uf:

(1)
式中:id、iq为电枢绕组在d、q轴的电流分量;if为励磁电流;rs、rf为电枢绕组、励磁绕组的电阻值;τ为极距;v为电机运行速度;ψd、ψq为d、q轴磁链;ψf为磁极磁链分量。
各磁链的表达式为

(2)
式中:Lmd、Lmq为d、q轴主电感;Lσ、Lσf为电枢绕组、励磁绕组的漏感。
采用id=0的控制方式,削弱电动机的耦合现象,此时id对悬浮力的影响即可忽略,得悬浮力方程:

(3)
式中:δ为磁悬浮气隙高度。

(4)
电动机d轴电枢反应电抗为

(5)
式中:μ0为真空磁导率;f为电源供电频率;m为动子及平台质量和;N、kw1分别为动子绕组每相串联匝数及基波系数;p为极对数;bE为动子铁心有效宽度;Kd为d轴电枢反应系数;δeff为有效气隙,
δeff=Kcδ
(6)
式中:Kc为卡特系数。
整理得:

(7)
式中:K为磁悬浮系数,其取值为5.659×10-6。
悬浮运动方程为

(8)
式中:g为重力加速度;fy为垂直方向扰动分量。
将悬浮力中的扰动项与fy视为垂直方向的总扰动,有:
(9)
其中:|f1|≤D,D是扰动上界且为大于零的常数。


(10)
2 区间二型模糊控制器的设计
2.1 区间二型模糊系统

Jx⊆[0,1]
(11)

(12)
式中:Jx⊆[0,1]为主隶属度;u为主隶属度值。


(13)
区间二型模糊集也可用图2表示。

图2 区间二型模糊集合
UMF、LMF均为一型模糊集合,分别定义二者为上、下隶属度函数。不确定覆盖域FOU为以UMF和LMF为上下边界围成的区域,可用公式表示为

(14)

(15)
正是FOU的存在增加了区间二型模糊集合主隶属度的不确定性[14],使得区间二型模糊控制器在处理系统不确定性问题时多了一个自由度。
以区间二型模糊集合为基础构成的模糊系统即区间二型模糊逻辑系统。系统包括模糊器(将输入模糊化)、模糊规则库、推理机、降阶器及解模糊五个模块,如图3所示。

图3 区间二型模糊逻辑系统
首先,系统输入的精确数值需要模糊器将其转换为模糊变量输入,模糊输入经过模糊规则库在推理机中进行模糊推理运算,得到系统的输出。与一型模糊系统不同,此时系统的输出为二型模糊集合,故需要经过降阶器使输出降为一型模糊集合,最后要得到系统精确的输出只需进行解模糊即可[15]。
2.2 区间二型模糊器的设计
本文以区间二型模糊逻辑系统为基础设计模糊控制器。
控制器以磁悬浮平台气隙高度的误差e及其变化率ec为输入x1、x2,控制量y为控制输出u,即:
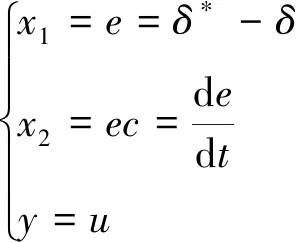
(16)
式中:δ*为磁悬浮系统悬浮给定高度;δ为实际悬浮高度。
输入精确值e、ec,经过模糊器,转换为论域范围[-1,1]的模糊变量E、EC。
为了提高控制速度,简化模糊控制规则,将E、EC均划分为三个模糊语言变量:N(负)、Z(零)、P(正)。
通过仿真,发现应用三角形隶属度函数的控制系统,响应速度较快且控制效果较好,故选其为输入隶属度函数定义模糊语言变量,如图4所示。图4中NU、ZU、PU分别为N、Z、P的上隶属度函数,NL、ZL、PL分别为N、Z、P的下隶属度函数。
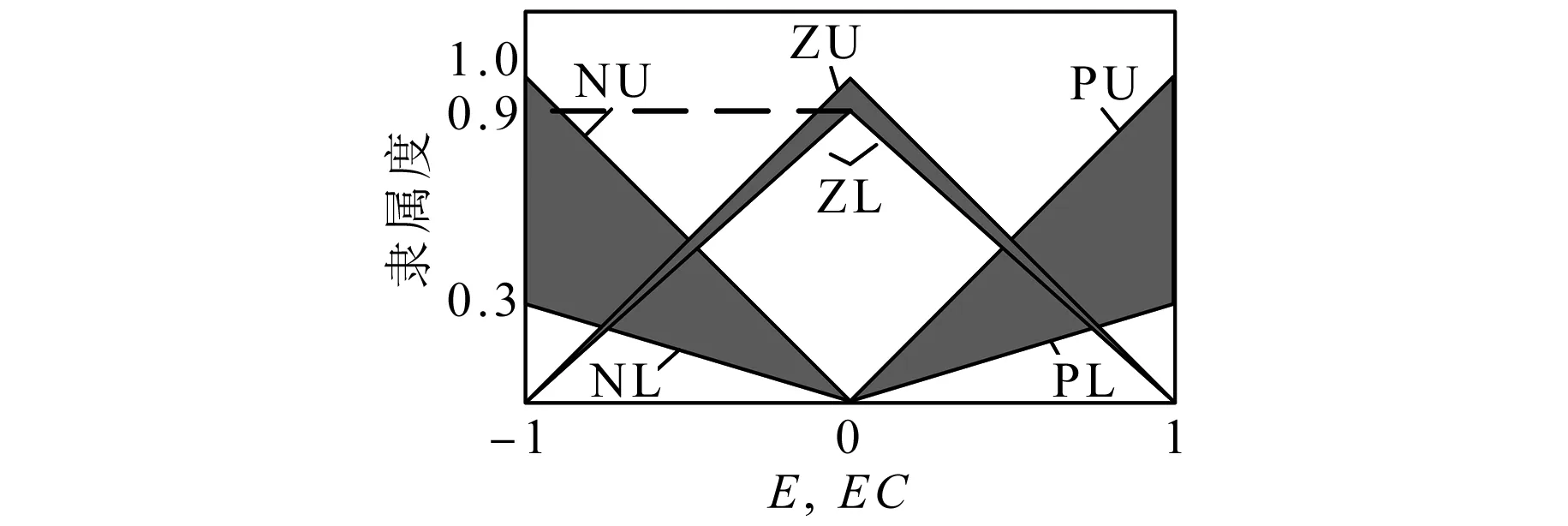
图4 输入隶属度函数
对于输出变量,其论域也选为[-1,1],并定义其语言变量为NB(负大)、NM(负小)、Z(零)、PM(正小)、PB(正大)。为提高计算速度,定义其为单值参数,有:NB=-1,NM=-0.5,Z=0,PM=0.5,PB=1。
在模糊控制器规则库中,有N条规则的控制器,规则形式如下:

thenyisYn,n=1,2,3,…,N
(17)

由输入的3个模糊语言变量及研究人员总结的经验,构建出含有3×3=9条模糊规则的规则库,如表1所示,即N=9。

表1 区间二型模糊规则库
已知输入、输出变量定义参数及模糊规则后,可进行模糊推理。

(18)
Fn(x)=

(19)


(20)

(21)
式中:yn为第n条规则的输出。
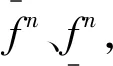
根据以上步骤,可得模糊控制面三维图,如图5所示,它表明了控制器输入-输出的所有信息。对于两个输入的每个可能值,都能得到基于规则的相应输出。
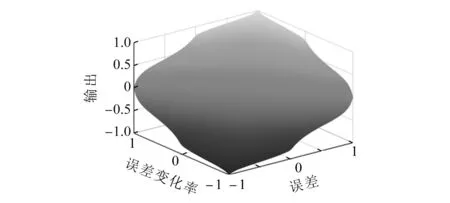
图5 模糊控制面三维图
3 仿真研究
区间二型模糊控制系统结构如图6所示。系统采用了区间二型模糊控制器作为位置环控制器,电流内环则用PI控制。
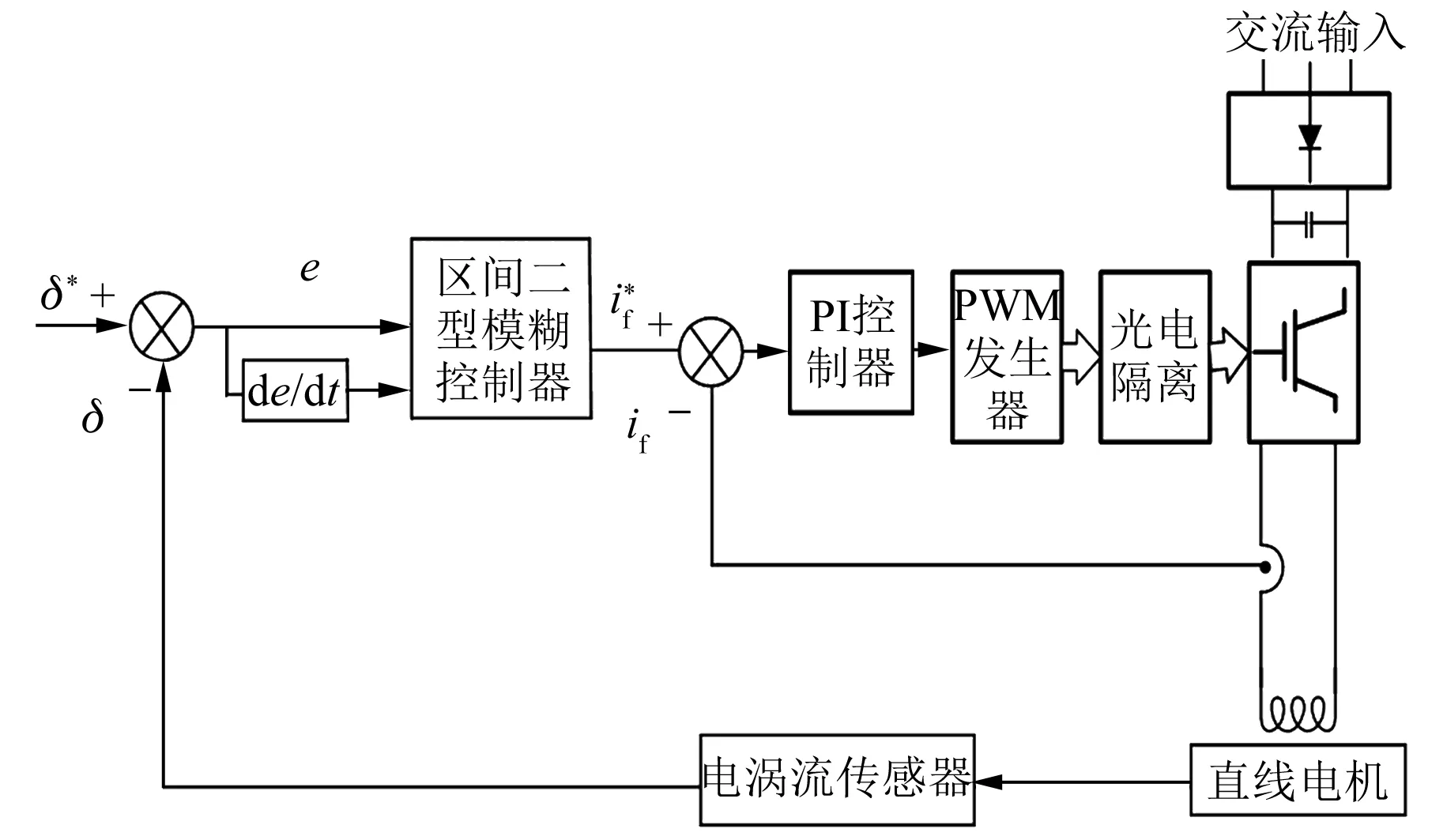
图6 系统控制框图
区间二型模糊控制器具体结构如图7所示。

图7 区间二型模糊控制器结构图
根据图6和图7,在MATLAB/Simulink中搭建模型,分三种情况对系统进行仿真,并与PI控制及一型模糊(T1F)控制的系统进行对比。
在仿真过程中,电动机仿真参数:电枢电阻Rs=1.2 Ω,d、q轴电感Ld=Lq=0.018 74 H,极对数p=3,if=5.7 A,Lmd=0.095 H,τ=0.048 m,m=10 kg。
区间二型模糊控制器参数通过仿真测试,得到最佳参数为:ka=1,kb=20,α=60,β=14 500。
以下给出系统的计算机仿真分析。待平台加工完成后再进行试验验证。
(1) 分析CELSM磁悬浮系统的起动性能。系统初始气隙高度3 mm,运行到达目标高度2.5 mm。图8为磁悬浮气隙高度响应曲线。为方便描述,以下用IT2F表示区间二型模糊控制。

图8 磁悬浮气隙高度响应曲线
由图8可知,PI控制的系统,约0.242 s到达目标高度,调节时间较长;T1F控制器控制的系统,调节时间减少,约0.153 s到达2.5 mm;而IT2F控制的系统,约0.084 s到达目标高度,到达稳定所需的时间最短,响应时间比前两种控制方法分别缩短了45.1%和65.3%。结果表明,采用IT2F控制的系统响应时间最短,起动性能最优越。
(2) 分析CELSM磁悬浮系统对突加负载扰动的抑制能力:采用f=10 N的阶跃信号模拟负载扰动,当系统运行到0.3 s时加入该信号,并于0.6 s去除该信号。图9所示为加入负载扰动后的气隙高度响应曲线。

图9 突加负载后气隙高度响应曲线
分析可知,采用PI控制的系统,在突加扰动后,气隙高度降落约0.047 mm,恢复到2.5 mm约需要0.243 s,系统降落幅度大,恢复时间长。采用T1F控制的系统,在受到负载扰动后动态降落约0.025 mm,恢复时间约需0.146 s,系统降落幅度减小且恢复时间变短。采用IT2F控制的系统,受到负载扰动的影响后,气隙高度降落约0.011 mm,恢复到稳定约需0.043 s,所需时间最短,受扰动影响最小,与前两者相比动态降落分别减少了76.6%和56.0%,恢复时间缩短了82.3%和70.5%。可见IT2F控制系统对外界扰动不灵敏,有着良好的抗干扰能力。
图10为突加负载扰动后的励磁电流响应曲线。

图10 励磁电流响应曲线
由图10可知,采用PI控制及T1F控制时,超调量分别约为2.26%及1.54%,恢复时间分别约为0.45 s及0.41 s;与前两者对比,IT2F控制的系统,超调量减少,约为1.35%,恢复时间也变短,约为0.30 s。说明采用IT2F控制的系统抑制扰动能力强。
(3) 分析CELSM磁悬浮系统对端部效应扰动的抑制能力:采用正弦函数f=sin(20t)模拟端部效应扰动,在0.3 s加入该扰动。图11为其磁悬浮气隙高度响应曲线。

图11 加入端部扰动后气隙高度响应曲线
由图11可知,PI控制器控制的系统在面临端部效应时,气隙高度难以恒定,波动较大;T1F控制的系统,较PI控制波动变小;而IT2F控制的系统,与前两者相比波动不明显,响应曲线平缓。由此可见,IT2F控制器对系统所受端部效应扰动抑制能力较强。同时由以上分析可知,在加入扰动信号后,采用IT2F控制的系统磁悬浮气隙高度变化较小,符合CELSM磁悬浮系统的刚度要求。
4 结 语
为了便于根据CELSM磁悬浮系统的结构特性进行控制,分析了其控制原理,推导了其电压及磁链方程,并令id=0构建其悬浮力方程和运动方程,以确定系统的状态空间方程。
为了充分展现系统优势,提出了区间二型模糊控制策略,依据区间二型模糊系统的运算步骤,以气隙高度误差及其变化率为输入,通过9条模糊规则的规则库进行推理,采用NT算法降阶解模糊得到控制器输出,设计了模糊控制器。
为了证明控制器的有效性,在MATLAB软件中搭建区间二型模糊控制的系统模型,分三种情况与PI控制及一型模糊控制的系统进行对比分析。结果表明,采用区间二型模糊控制的系统性能最佳,系统起动性、稳定性、抗干扰性皆占优势。
