基于印度G33标准的翻车机研制
2022-08-31朱昌进熊光宝
朱昌进 熊光宝
中国电建集团武汉重工装备有限公司
1 引言
近年来,国内重型装备企业紧跟国家“走出去”的发展战略,积极开拓海外市场。某司于近期签订了印度电厂翻车机项目,并根据技术协议和印度标准进行了针对性的设计,设计完全满足用户和印度标准要求。通过研究相关技术文件及印度铁道部翻车机相关标准G33(Rev.1)[1],发现印度市场对翻车机的需求与国内市场主要的不同点在于以下方面:
(1)由于印度本地煤矿内的石块等杂物较多,业主通常会要求翻车机煤篦子布置于零米层,以便于小型铲斗车驶上煤篦子清除堆积在煤篦子上的杂物。
(2)印度市场习惯于采用液压马达作为驱动元件,翻车机系统均采用液压马达直接驱动,液压马达与驱动齿轮之间不再设置任何减速机构,而国内市场通常使用变频电机带动减速机驱动。
(3)印度市场翻车机的称重装置与翻车机平台一体化集成,而国内的轨道衡通常布置在翻车机进车端的铁路轨道上,采用单独的一套系统运行。
(4)G33标准要求翻车机的靠车装置与敞车侧立柱之间保持金属接触,而国内的靠车装置通常在靠车装置上装有高密度橡胶板,防止在翻卸过程中对敞车造成损坏。
(5)标准要求敞车的顶部压车装置包括6个横向压车梁(共12个压持点),并且每个压持点需按标准要求布置,而国内的翻车机标准对此没有明确的要求,常规翻车机有8个压持点,港口翻车机多为4个压持点。
(6)G33标准强制要求翻车机平台上安装夹轨器,防止在翻卸作业中车辆发生意外移动,国内的翻车机通常没有该要求。在翻车机平台增加夹轮器会增加翻车机翻转时的负载阻力矩,影响驱动装置的功率选型。
2 系统布局型式及主要参数
根据现场铁路线及场地情况,设计系统布置型式(见图1)。
该翻车机系统采用折返式布置型式,系统主要由重车调车机、夹轮器、翻车机、安全止挡器、迁车台、空车调车机组成。为保证系统的运行效率,各个设备之间的布置较为紧凑,其中重车线和空车线距离为12.75 m,迁车台中心线矩翻车机中心线20 m,翻车机中心线距离夹轮器中心为15.5 m。
系统工作时,首先由重车调车机将整列重车牵引至夹轮器位置,夹轮器将第二节敞车轮对夹紧,防止整列重车在铁路上溜车。
随后由人工将第一节敞车和第二节敞车之间的车钩摘开,重车调车机牵着第一节重车到翻车机的平台上定位。定位完毕后,重车调车机驶出翻车机区域,翻车机的压车机构和靠车机构将敞车夹紧并开始翻转。在此过程中,重车调车机返回初始位置,将第二节重车挂住,牵向翻车机,待翻车机内的敞车翻卸完毕并回转到零度位置时,重车调车机将第二节重车牵向翻车机平台定位,同时将空车推上迁车台。
迁车台将空车皮迁移至空车线,由空车调车机将空车推出迁车台,并在空车线上集结,至此一个翻卸循环完毕。整列重车的翻卸,就是不断的重复上述循环,直至整列重车翻卸结束。
翻车机系统主要运行参数见表1。

表1 翻车机系统参数
3 主要结构的设计
翻车机单元结构主要由主轴支承装置、端盘、压车装置、靠板系统、靠车梁、电缆上机支架、托车平台、称重秤架、称重装置、传动装置、平台销座组成(见图2)。
翻车机的主体结构采用侧倾式结构,在工作过程中,翻车机本体及敞车的重量完全依靠翻车机两端的主轴支承装置托住,驱动装置的小齿轮与翻车机端盘上的齿圈啮合,并推动翻车机绕主轴支承装置正翻或回翻。

1.主轴支承装置 2.端盘 3.压车装置 4.靠板系统 5.靠车梁 6.电缆上机支架 7.托车平台 8.称重秤架 9.称重装置 10.传动装置 11.平台销座图2 翻车机结构组成
3.1 主轴支承装置
主轴支承装置的作用是托住翻车机本体结构及铁路敞车,主轴支承装置中设有回转轴承,可以让翻车机转子连同敞车一起绕该轴回转,实现卸车功能(见图3)。为防止端盘和主轴之间发生相对位移,设置了一种锁紧套装置,可以将主轴和端盘连接成为牢固的整体。
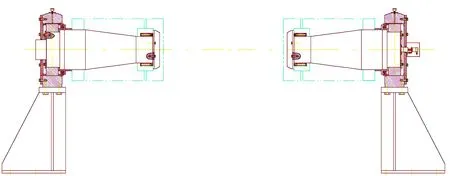
图3 主轴支承装置结构
3.2 端盘
在翻车机的进出车端分别设置有进车侧端盘、出车侧端盘。在端盘的外沿设置有齿条装置,驱动装置的小齿轮与该齿条啮合推动端盘旋转(见图4)。在此项目中,由于翻车机的偏心距较大,端盘直径达到了9 600 mm,为了便于发货时的公路运输,设计时将端盘做成了分段结构,每段端盘的最大尺寸均不超过公路运输限界。

图4 端盘及靠车梁
3.3 靠车梁
靠车梁的作用是将翻车机两端的端盘连接成为一个整体,形成一个稳固的刚性转子结构,同时在靠车梁上设有压车装置和靠板装置的支座,便于安装压车装置和靠车装置,实现敞车在翻车机上的定位夹紧。靠车梁在工作中受弯扭组合作用,整体应力状况较为复杂。
3.4 靠板装置
靠板装置是一块由4只油缸及两端的撑杆共同支撑的平板结构件,当重车在翻车机平台上定位完毕后,靠板系统的4只液压油缸首先动作,将靠板缓缓推出,直至靠板完全与敞车的侧面贴合,液压系统自动将靠车油缸液压锁锁紧,完成对敞车侧面的定位固定,防止敞车翻转过程中的侧向滑移。靠板的内部还设置有2块靠板振动装置,振动装置上安装有振动电机,当翻转机翻转至最大角度时,启动振动电机,振动装置对敞车侧立柱进行击振,将车厢内剩余物料震落至料斗内(见图5)。

图5 靠板装置
3.5 压车装置
压车装置的结构见图6,连接于压车支座上的压车油缸推动压车臂绕铰点旋转,同时带动前端的压车均衡梁运动,实现对敞车压车和松压动作。
压车装置包含1个车辆转向架弹簧弹性势能的释放机构,其采用双活塞油缸方案,翻车机翻转过程中,当敞车对顶部压车梁作用力超过油缸阀块释压阀的设定值时,压车梁就会自适应的向上抬起,以释放车辆转向架弹簧中的弹性释能,保证压车装置及车厢不承受过大的应力。翻车机翻转角度达到最大角度160°时,压车装置锁施加的压力应正好满足承受空车重量的需要。

图6 压车装置结构
3.6 驱动装置
翻车机的驱动装置采用低速大扭矩液压马达直接与齿轮轴连接,马达的壳体采用扭力臂与底座连为一体,液压马达的制动器与马达集成为一体(见图7)。

图7 驱动装置组成及结构
由于翻车机旋转中心与敞车中心的水平距离达到了3 100 mm,造成翻车机旋转时负载阻力矩较大,给驱动机构的设计带来了困难。为减小翻车机的驱动力矩,需要在端盘上远离敞车的一侧布置平衡配重,来减小翻车机转子整体重心产生的负载阻力矩,同时还需要加大翻车机驱动装置的驱动功率,并提高啮合的齿轮、齿条的强度。
3.7 平台及称重装置
翻车机的平台与端盘通过平台销座及平台挂钩与端盘连接,翻车机运转过程中,允许平台有一定的浮动,其作用是,当翻车机处于零度状态时,平台直接落于底部的秤架上,这时,平台不与翻车机端盘接触,保证敞车称重的准确性。当翻车机开始翻转时,端盘上的平台销座带动平台逐渐从秤架上的定位锥上脱离,并随端盘一起旋转。
4 计算分析
4.1 翻车机翻卸时负载变化规律
为分析翻车机翻转过程中各个机构的受力变化,以及整体重心的变化规律[2-3],需要对翻车机翻卸过程中的负载变化规律进行分析。图8是翻卸BOXN敞车时,随着翻卸角度的变化,翻车机各机构的受力变化曲线,其中,(a)为翻车机翻转过程中车厢内物料重量的变化曲线;(b)为翻卸过程中敞车整体高度的变化;(c)为靠板装置所受靠车力的变化曲线;(d)为压车装置所受负载的变化曲线。由该曲线可知,靠车机构受力最大的位置发生在翻车机翻转至55°时,而压车力则随着翻转角度的变化而不断增加。初始阶段由于压车装置还未与敞车接触,故压车力为零。

图8 靠车机构及压车机构的受力变化曲线
4.2 翻车机驱动功率校核
根据翻车机翻卸过程中物料的变化规律,可以得到翻车机在翻转过程中整体重心的变化情况;再根据翻车机转子整体重心与回转中心的水平距离,算出翻车机旋转时的负载阻力矩;再通过驱动装置小齿轮与翻车机端盘转子齿条的传动比关系,求得驱动装置需要提供的功率情况。图9所示为翻车机翻卸总重为102.6 t的BOXNHA敞车时,翻车机驱动装置负载阻力矩的变化情况,可见翻车机需要最大功率发生在正翻的起始阶段。

图9 翻车机驱动装置负载变化曲线
4.3 关键部件的强度校核
根据翻车机翻卸过程中物料变化规律所得到的各个机械结构上的载荷情况,通过对关键部件的受力分析,可以计算出各个机械结构的应力分布情况,用此来分析翻车机的结构强度是否满足设备的使用要求(见图10)。通过分析,翻车机工作时各主要结构件的应力分布均满足材料的安全使用要求。

图10 关键部件的强度校核
5 主要创新点
研制的该型翻车机主要有以下几个创新点:
(1)本项目完全依照用户要求采用印度铁道部G33标准进行设计,系统的布置形式及翻车机结构配置均满足标准要求,符合印度市场需要。
(2)物料翻卸时,混入物料中的杂物直接落在煤篦子上方,便于小型作业机械直接驶上煤篦子进行机械化清理杂物,减小了运行人员的劳动强度,提高了系统的运行效率。同时煤篦子布置于零米层,还可以减少土建施工的基础开挖量,降低项目的建设成本。
(3)国内翻车机的称重装置一般采用成套的翻车机轨道衡,并布置于翻车机入口处的铁路轨道上,与翻车机本体设备不产生关联。而印度市场的翻车机要求翻车机称重装置与翻车机平台一体化集成,为了实现该要求,本次翻车机的设计中采用了如下结构:翻车机回到零度时,托车平台通过定位锥落入安装于地面的秤架上,与翻车机平台脱开一段距离,实现翻车机一体化称重。
(4)采用集成的独立控制和释放的压车油缸,压车油缸可以单独控制,同时每一个油缸内部设置有释放油缸,当压车装置的受力超过设定值时,压车装置能够进行自适应调整,防止压车力超过设计值。
6 结语
本项目对印度市场的翻车机标准进行研究,通过采取侧倾式主体结构、活动平台等措施,满足了印度铁道部G33标准要求,翻车机在整个翻转角度范围内,敞车及物料均位于煤篦子上方,可为今后国内重型装备走向海外提供参考和借鉴。