Security Control for Uncertain Networked Control Systems under DoS Attacks and Fading Channels
2022-08-28ChengzhenGaoChengTanHongtaoSunMingyueXiang
Chengzhen Gao, Cheng Tan, Hongtao Sun, Mingyue Xiang
Abstract: This paper characterizes the joint effects of plant uncertainty, Denial-of-Service (DoS)attacks, and fading channel on the stabilization problem of networked control systems (NCSs). It is assumed that the controller remotely controls the plant and the control input is transmitted over a fading channel. Meanwhile, considering the sustained attack cycle and frequency of DoS attacks are random, the packet-loss caused by DoS attacks is modelled by a Markov process. The sampled-data NCS is transformed into a stochastic form with Markov jump and uncertain parameter. Then,based on Lyapunov functional method, linear matrix inequality (LMI)-based sufficient conditions are presented to ensure the stability of uncertain NCSs. The main contribution of this article lies in the construction of NCSs based on DoS attacks into Markov jump system (MJS) and the joint consideration of fading channel and plant uncertainty.
Keywords: networked control systems; Denial-of-Service (DoS) attacks; uncertainty; fading channels; Markov jump system
1 Introduction
Owing to advantages in networked control systems (NCSs), in which physical elements communicate via networks, contributing to the efficiency of control data transmission in industrial control systems, an increasing emphasis has been witnessed on NCSs in recent years [1–5]. However, attacks to communication networks have become prevalent over the last decade. Note that the results of a successful attack on NCSs can be more damaging because control systems are at the core of many industrial infrastructures. As a result, enhancing the resilience to cyber attacks is an important issue and security issues in NCSs have been investigated from different viewpoints.
This paper is concerned with Denial-of-Service (DoS) attacks. DoS attacks aim to cause system packet-loss by malicious attackers sending useless data to occupy the communication channels, which has a high potential to damage system safety performance. Recent results such as [6–9] focus on the system safety performance under DoS attacks. The common characteristic of these related works is to explore admissible defensive control laws to stabilize system or optimize the index function. For example, the authors of [6] have determined suitable scheduling of the transmission times of NCSs controllers for input-to-state stability (ISS) under determined DoS attacks frequency and duration. In[7], a game optimization strategy is introduced for the resilient control problem of NCSs under DoS attacks. The maximum threshold of DoS attacks frequency and duration for state feedback stabilization have been recently studied in[8].
Due to various random variations in structures and parameters, Markov jump systems(MJSs) [10–13] model is introduced in the control and verification community. In [10], the stability issues are investigated for MJSs with partially unknown transition probabilities. In recent years, MJSs have been widely investigated for NCSs under DoS attacks. The authors of [14]have incorporated the MJSs in the NCSs and addressed the resilient control under Markov process packet-loss. However, in a practical system,modeling NCSs into MJSs is difficult and challenging, which provides the first motivation of this article.
On the other hand, the insertion of communication networks with the limited channel capacity introduces some unavoidable problems including plant uncertainty and fading channels,which can degrade the system performance and even cause instability. These uncertainties have garnered extra attention in practical systems [15,16]. However, there are few jobs that consider the joint effects of DoS attacks, fading channels and uncertainty in NCSs, which provides the second motivation.
In this paper, we consider an uncertain NCS in which the control data is sent through a fading channel, and DoS attacks are launched to cause packet-loss between the controller and actuator. The main contributions of the paper can be summarized as:
1) Due to the DoS attacks frequency and period are random, the packet-loss under DoS attacks are characterized as a Markov process.Following the analysis of the joint impact of the DoS attacks, fading channel and plant uncertainty, a novel uncertain MJS with unstable subsystems is constructed on the basis of the NCS.
2) By use of the proposed MJS model, stability criteria are established for the system by Lyapunov functional, and employing linear matrix inequality (LMI) to establish standards for determining state feedback gains and unknown variables.
Notation Throughout the paper,⊙denotes the Hadamard product. He(A) represents the sum ofAandA′.λmin(A) denotes the minimum eigenvalue of matrixA.Rnrepresents thendimensional Euclidean space.
2 Problem Statement
In this paper, we investigate an uncertain NCS under DoS attacks and fading channels as shown in Fig. 1.

Fig. 1 Uncertain NCS under DoS attacks and fading channel

Fig. 2 Control signal transmission under DoS attacks
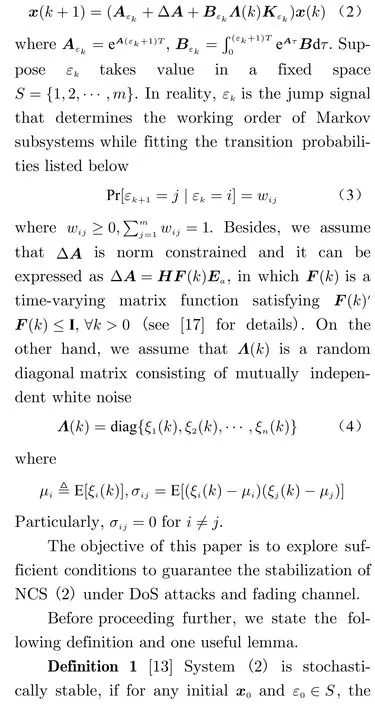
Based on the given setup, the overall uncertain NCS can be characterized as the following MJS
3 Main Results
In this section, we are concerned with security control for uncertain NCSs under DoS attacks and fading channels. By constructing an ingenious Lyapunov function, we propose sufficient conditions to guarantee the stabilization with entirely known or partly unknown transition probabilities.
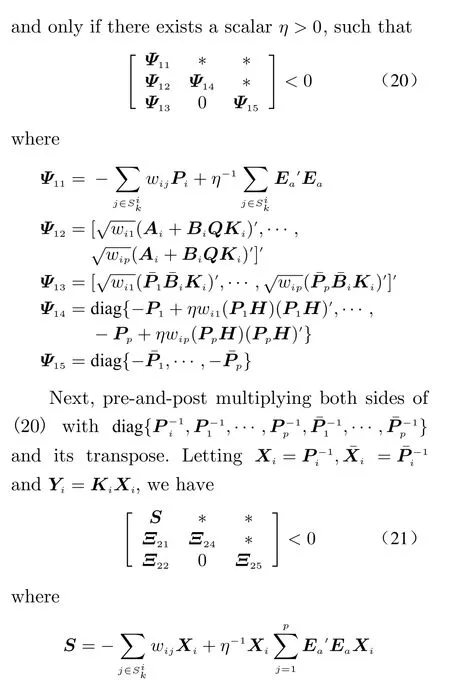
3.1 Stabilization with Entirely Known Transition Probabilities

Now, we are in the position to propose the following results.
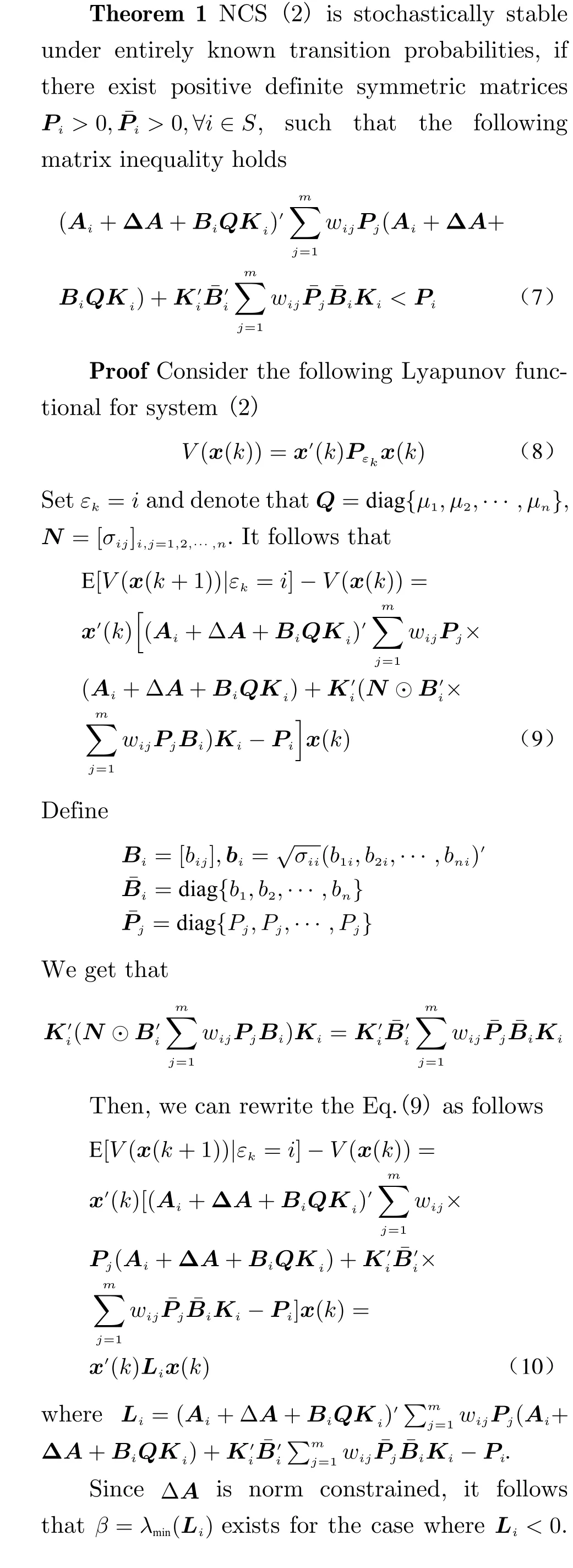


According to LMI, we can obtain condition(12). The proof is completed.
In this part, the transition probabilities in stochastic jumping process determine the system behaviors, and usually, they are assumed to be completely accessible a priori. Generally, under the entirely known transition probabilities, the system performance and ultimate safety are easier to be guaranteed than that with partly unknown transition probabilities. However, the likelihood of obtaining the ideal knowledge on all transition probabilities is actually questionable in practice. Various efforts have been devoted to studying the influence of specific malicious attacks with partly unknown transition probabilities.
3.2 Stabilization with Partly Unknown Transition Probabilities
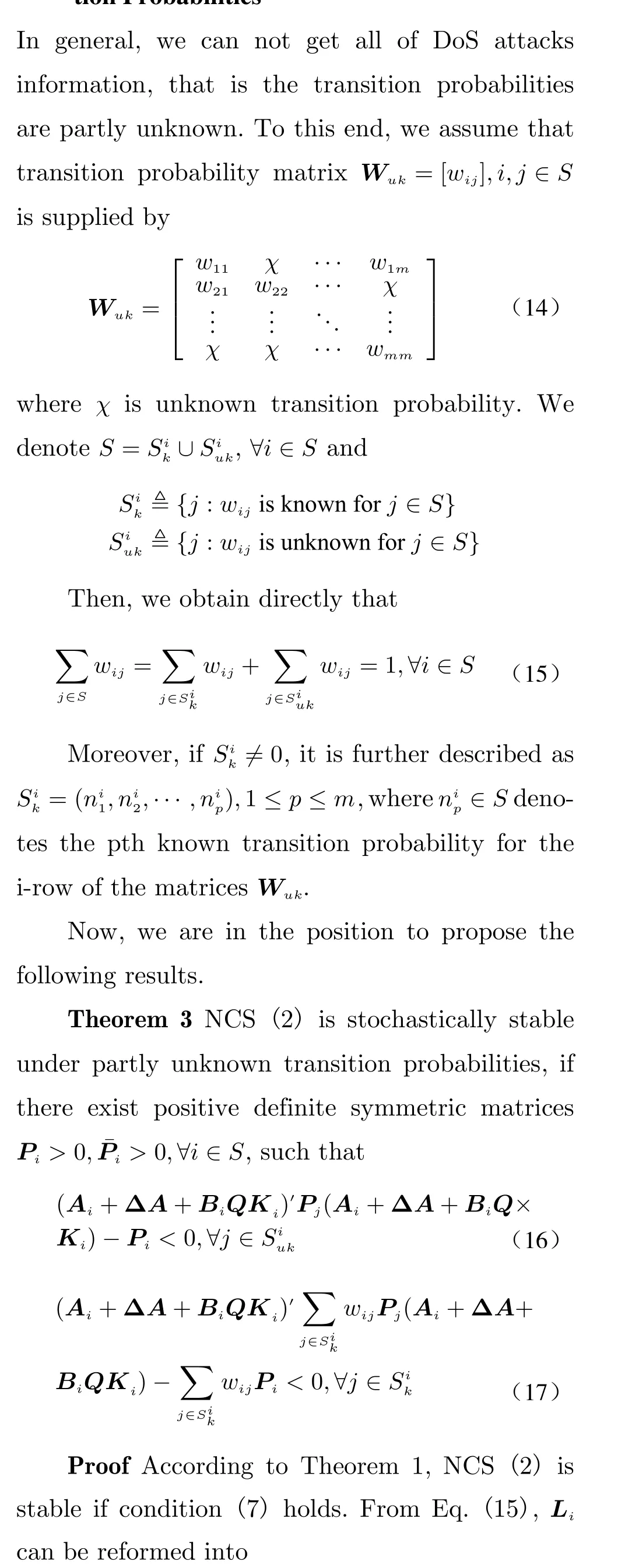
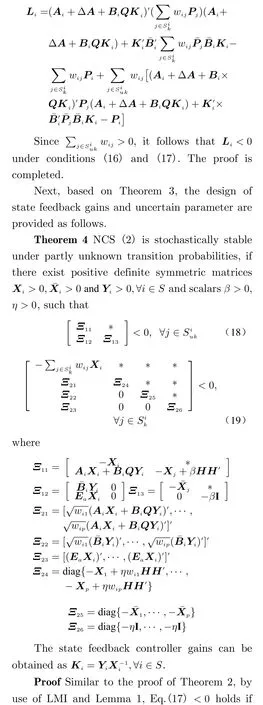
According to LMI, we can obtain condition(19). The proof of condition (18) is similar to the above that will not be repeated. The proof is completed.
In this paper, we characterize the joint effects of plant uncertainty, DoS attacks, and fading channel on the stabilization problem. In addition, because the event-triggered mechanism can effectively reduce the communication load and avoid the waste of communication resources,this mechanism has been widely used to study NCSs with random delays. In the future, T-S fuzzy model and event trigger will be considered for improving system performance subject to DoS attacks, which defines a promising work direction.
4 Illustrative Example
A linearized model of the uncertain system under

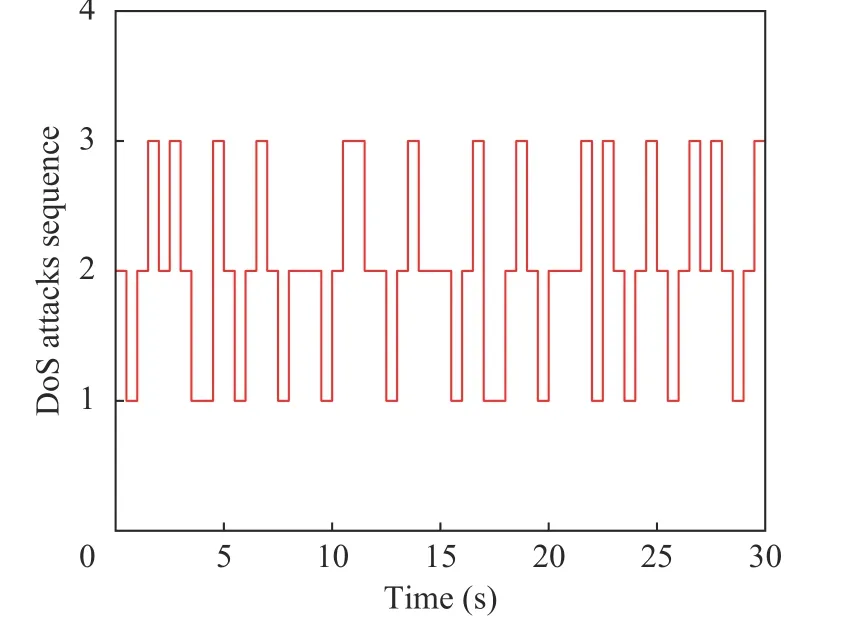
Fig. 3 Markov packet-loss under DoS attacks
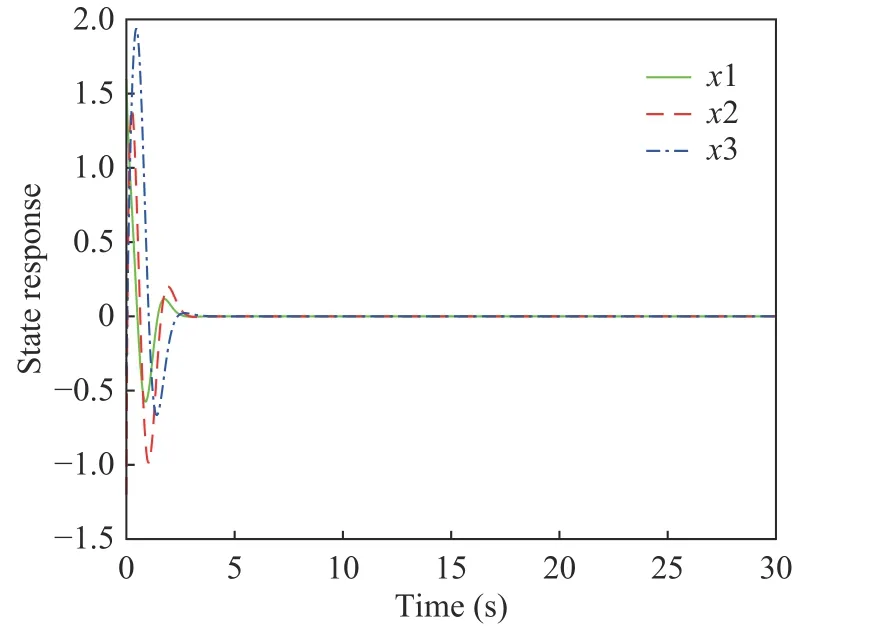
Fig. 4 State response under full-information DoS attacks
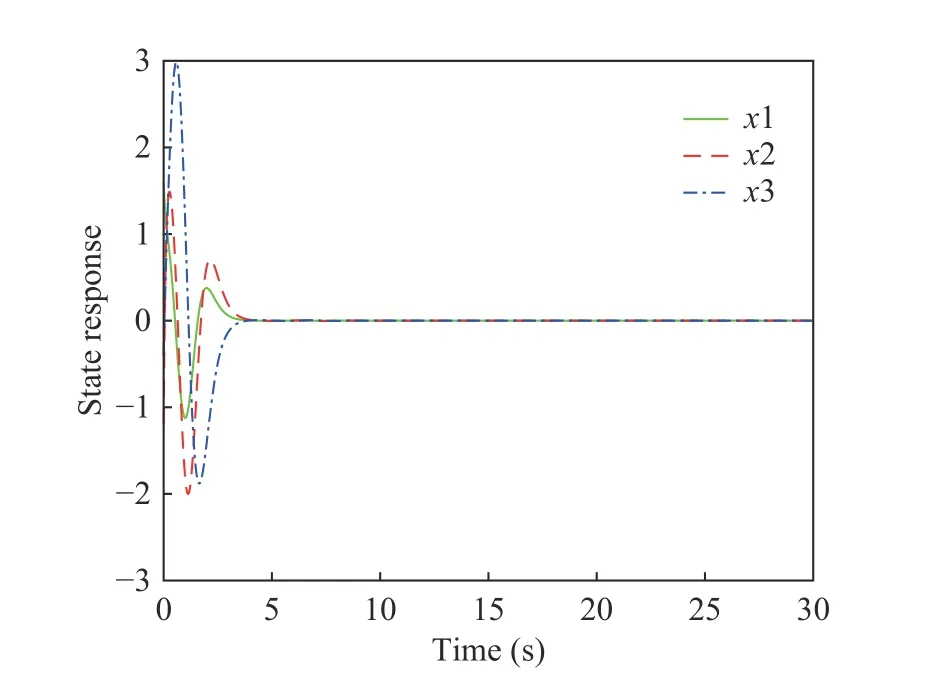
Fig. 5 State response under part-information DoS attacks
5 Conclusion
In the article, we focused on the uncertain NCS under DoS attacks and fading channels, where the considered uncertain NCS can be characterized as an MJS. Then, by utilizing the Lyapunov functional method, we obtained sufficient conditions for stability under entirely known and partly unknown transition probabilities. Moreover, some simple examples have been given to illustrate the effectiveness of the proposed results.
杂志排行

Journal of Beijing Institute of Technology的其它文章
- Reliability Analysis of Repairable System with Multiple Closed-Loop Feedbacks Based on GO Method
- Blood Glucose Prediction Model Based on Prophet and Temporal Convolutional Networks
- Fault Diagnosis Method Based on Xgboost and LR Fusion Model under Data Imbalance
- An Improved Repetitive Control Strategy for LCL Grid-Connected Inverter
- Event-Triggered Moving Horizon Pose Estimation for Spacecraft Systems
- A Causal Fusion Inference Method for Industrial Alarm Root Cause Analysis Based on Process Topology and Alarm Event Data