Event-Triggered Moving Horizon Pose Estimation for Spacecraft Systems
2022-08-28ShuangxiLiHengguangZouDaweiShiJunzhengWang
Shuangxi Li, Hengguang Zou, Dawei Shi, Junzheng Wang
Abstract: An event-triggered moving horizon estimation strategy is proposed for spacecraft pose estimation. The error dual quaternion is used to describe the system state and construct the spacecraft attitude-orbit coupled model. In order to reduce the energy consumption on spacecraft, an event-triggered moving horizon estimator (MHE) is designed for real-time pose estimation with limited communication resources. The model mismatch caused by event-triggered is finally solved by solving the cost function of the min-max optimization problem. The system simulation model is built in Matlab/Simulink, and the spacecraft pose estimation simulation is carried out. The numerical results demonstrate that the designed estimator could ensure the estimation effect and save spacecraft communication and computing resources effectively.
Keywords: state estimation; pose estimation; event-triggered; moving horizon estimation
1 Introduction
With the development of aerospace technology,the requirements for spacecraft on-orbit missions have become more diverse and complex in recent years. The types of missions have gradually shifted from observation and communication tasks of a single spacecraft system to the rendezvous and docking of multiple spacecraft systems, and other emerging fields. The determination of the precise attitude and position of each spacecraft is a prerequisite for multi-spacecraft systems to complete the above tasks [1−3].
The coordinated operation of spacecraft in orbit generally requires the spacecraft to form a formation within a range of tens of meters to several kilometers and maneuver in accordance with established rules [4−5]. In spacecraft formation flying, each spacecraft has to obtain accurate real-time information of the position and attitude to meet mission requirements. In the previous single-spacecraft working mode, the pose estimation of the spacecraft is designed by using the independent attitude and position estimators.After years of development, this design has been widely studied [6−7]. For space missions such as proximity operation, the relatively independent state estimation mode in the past has been difficult to satisfy the needs of coordinated work of multiple spacecraft. In order to solve these problems, many studies designed the controllers and estimators based on the established attitude-orbit coupled models, which can give an integrated description of the position and attitude of spacecraft. In [8], Wang used dual quaternion to derive the general kinematics and dynamics model of the spacecraft and then designed the corresponding controller. In [9], Sveier described the kinematics model and noise with Cayley transformation. In [10], Filipe et al. used multiplicative extended Kalman filter with unit dual quaternion to realize the pose estimation in the continuous pose data transmission mode. However, the methods used in the above literature occupy the on-board computing and communication resources greatly. In order to solve this problem, we propose an event-triggered pose estimation strategy based on moving horizon estimation to limit the bidirectional communication and reduce computational complexity. Compared with the traditional moving horizon estimation, the estimator designed in this paper considers the mismatch problem caused by measurement error under the framework of time-varying system model, ensures the feasibility of the solution by solving the minmax optimization problem and shortens the computation time.
The remainder of this paper is organized as follows. Section 2 builds the spacecraft attitudeorbit coupled model and introduces the problem of spacecraft’s pose state estimation. Section 3 introduces the proposed method of event-triggered moving horizon estimator. The simulation verification for the spacecraft attitude-orbit coupled state estimation mission scenario is described in Section 4, and the result of the simulation is shown in Section 5.
2 Attitude-Orbit Coupled Model
2.1 Dual Quaternion
Dual quaternion is a mathematical tool that introduces dual numbers on the basis of quaternion [11]. Its definition is as follows


2.2 Measurement Model
In order to obtain more accurate position and attitude information of spacecraft, the measurement of attitude is needed. Similar to the definition used in [14], the model of dual velocity measurement is as follows
2.3 Kinematic Model in Dual Quaternion Representation
The differential equations of spacecraft kinemat-

δqB/Idescribes the difference between the estimated value of pose and the real value. Therefore, the differential equation of the system satisfies
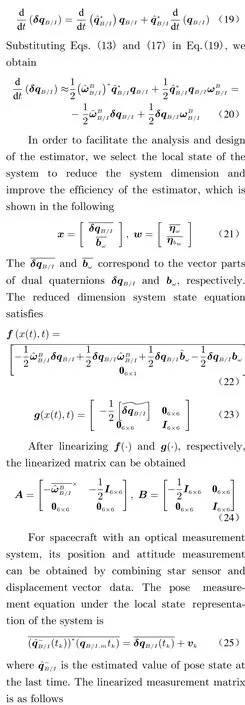
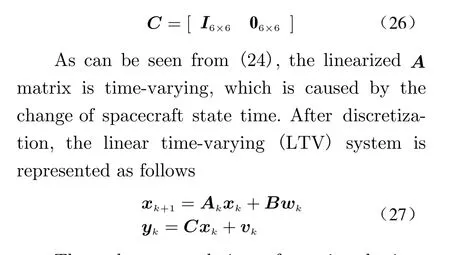
The subsequent design of moving horizon estimator will focus on the time-varying nature of the system and the measurement error of the remote estimator.
3 Design of Moving Horizon Estimator
3.1 Event Triggering Mechanism
The traditional moving horizon estimation method needs to solve the optimization problem online and receive the sensor data at each sampling time to refresh the optimization problem.However, for on-orbit spacecraft, frequent transmission of sensor measurement data will greatly consume on-board energy and occupy limited network bandwidth. Therefore, this paper realizes event-based data transmission communication and state estimation through event-triggered scheduling. The system flow chart is illustrated in Fig. 1.
As shown in Fig. 1, the remote estimator consists of model iteration and MHE-based estimation. Whenrk=1,ykis received by the remote state estimator, and the MHE-based estimator is performed and gives a sequence of optimal state estimates for the current estimation window; The last element and the first element of the sequence are transmitted to the spacecraft communication network. The last element is used as the optimal state estimates of the current statexk, and the first element will be used as the initial value of the model iteration module at the next sampling time. Whenrk=0, the estimator can not receiveyk, the system model is used to
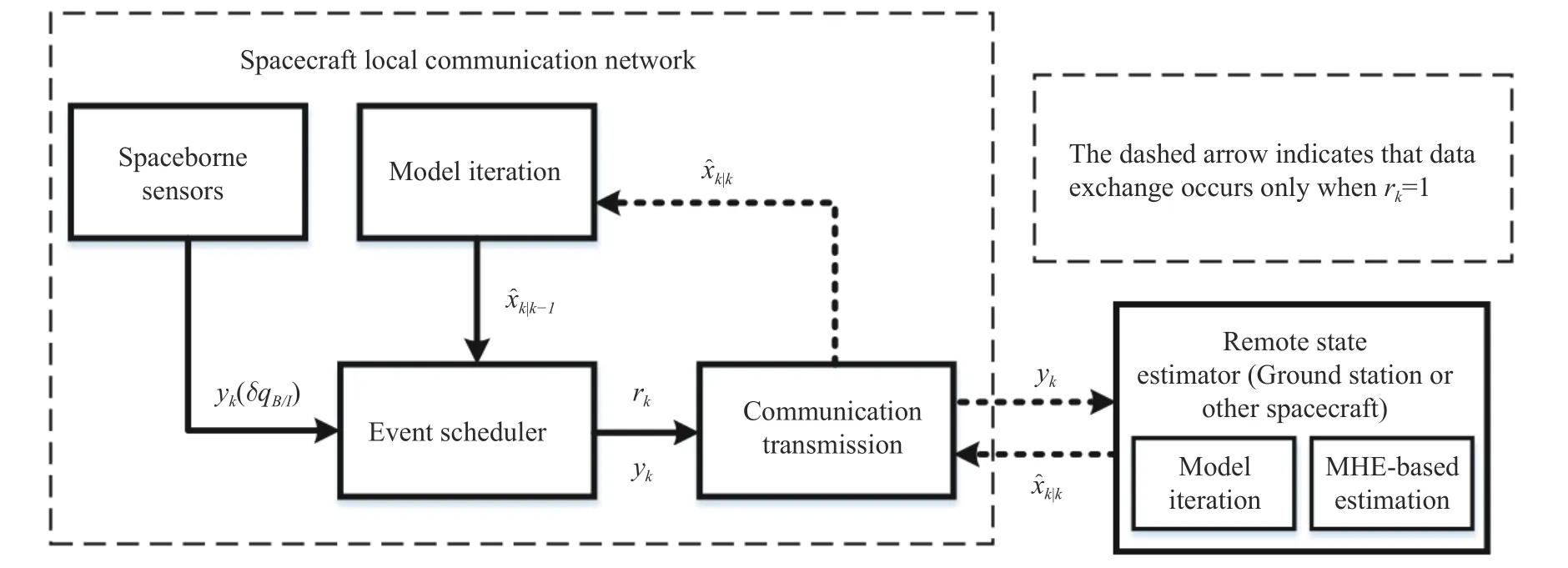
Fig. 1 Diagram of the event-triggered state estimation mechanism

3.2 Estimator Design

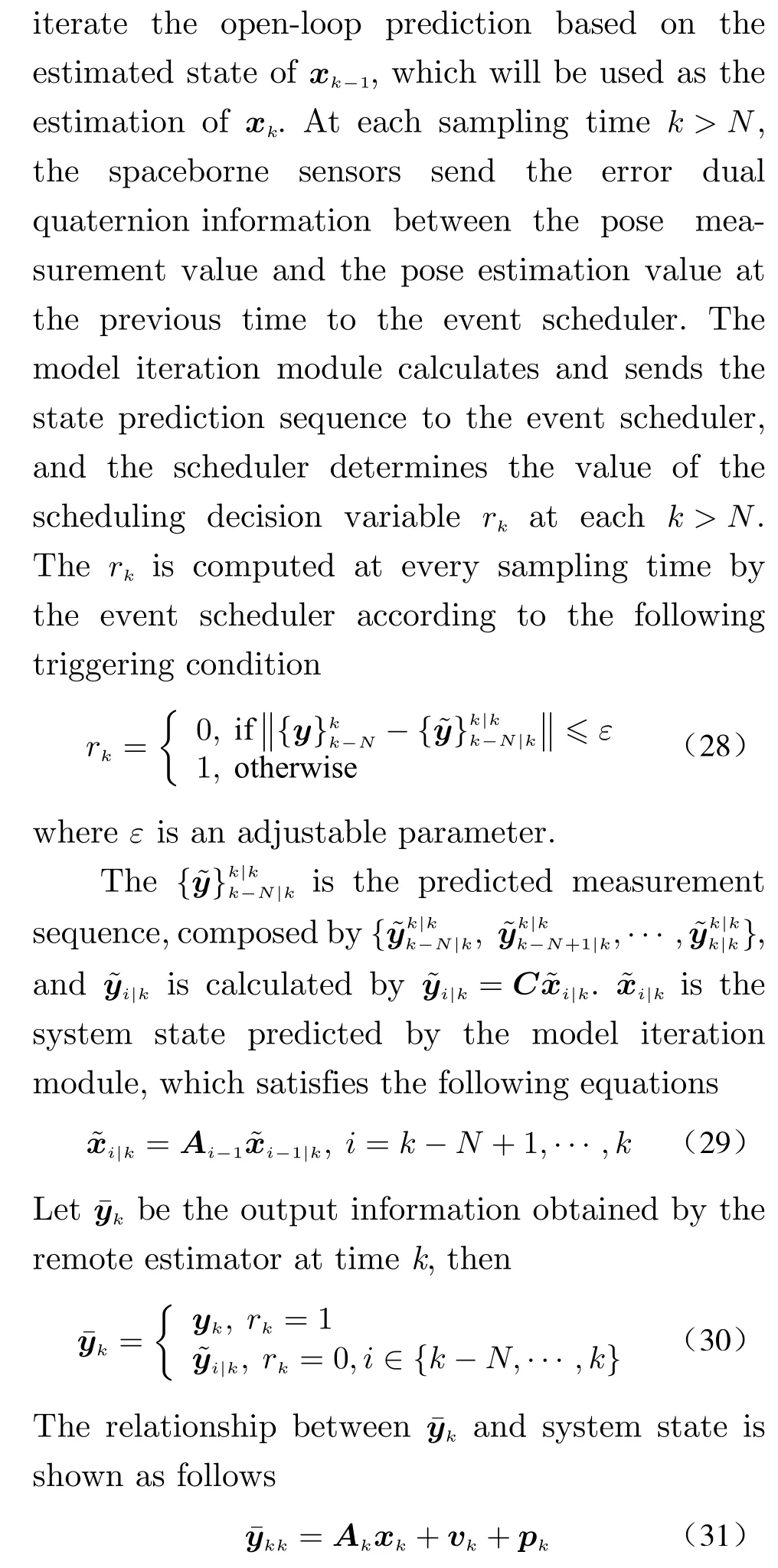
pi,i=k-N,...,kcan be regarded as the mismatch between the data received by the remote estimator and the real measured value at timei. To handle this mismatch, we aim to find the optimal solution in the worst by solving the following min-max optimization problem.
4 Experimental Results
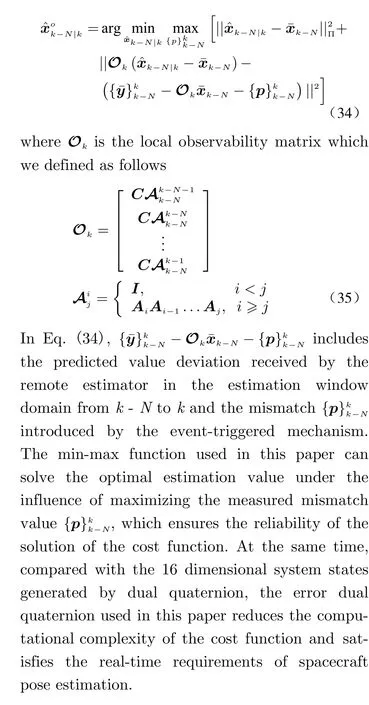
Based on the event-triggered MHE algorithm designed in the previous section, the pose estimation simulation of on-orbit spacecraft is carried out. In this paper, it is assumed that the initial orbital elements of the spacecraft is [a,e,i,Ω,ω,v]=[42 166 680,0.06,0.000 54,0,0,125], and the initial value of attitude quaternion is [0.996,0.04,–0.05,0.06]. This paper assumes that there is a chaser spacecraft in space, which keeps a relative distance of 50 m from the target spacecraft for tracking and measurement. The standard deviations of noise of angular velocity, linear velocity,quaternion and position are set as 0.025 (°)/s,5 mm/s, 0.000 05 and 5 mm. The simulation time is 60 s, and the sampling interval between pose measurement and dual velocity measurement is 0.01 s. The mass of the spacecraft is 100 kg and the moment of inertia is assumed to be
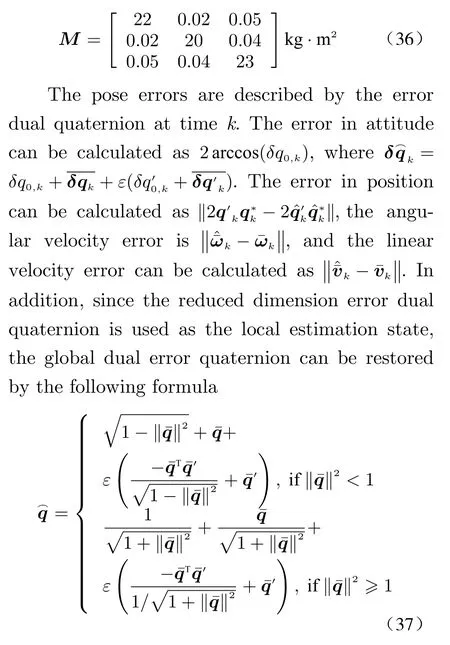
The simulation results are shown in Fig. 2,due to the error between the initial position and attitude of the spacecraft and the real value, the estimation effect fluctuates greatly in the first few seconds of the simulation. Finally, the spacecraft position and attitude estimation errors converge to the corresponding range. In order to speed up the convergence of the estimator, the trigger threshold can be tightened appropriately at the beginning of the simulation. At this time,the system communication rate is 79.46%.Finally, this paper selects the time domain window lengthN= 7 and the trigger threshold =0.055. Tab. 1 shows the root mean square error and average event trigger rate after 100 Monte Carlo simulations.
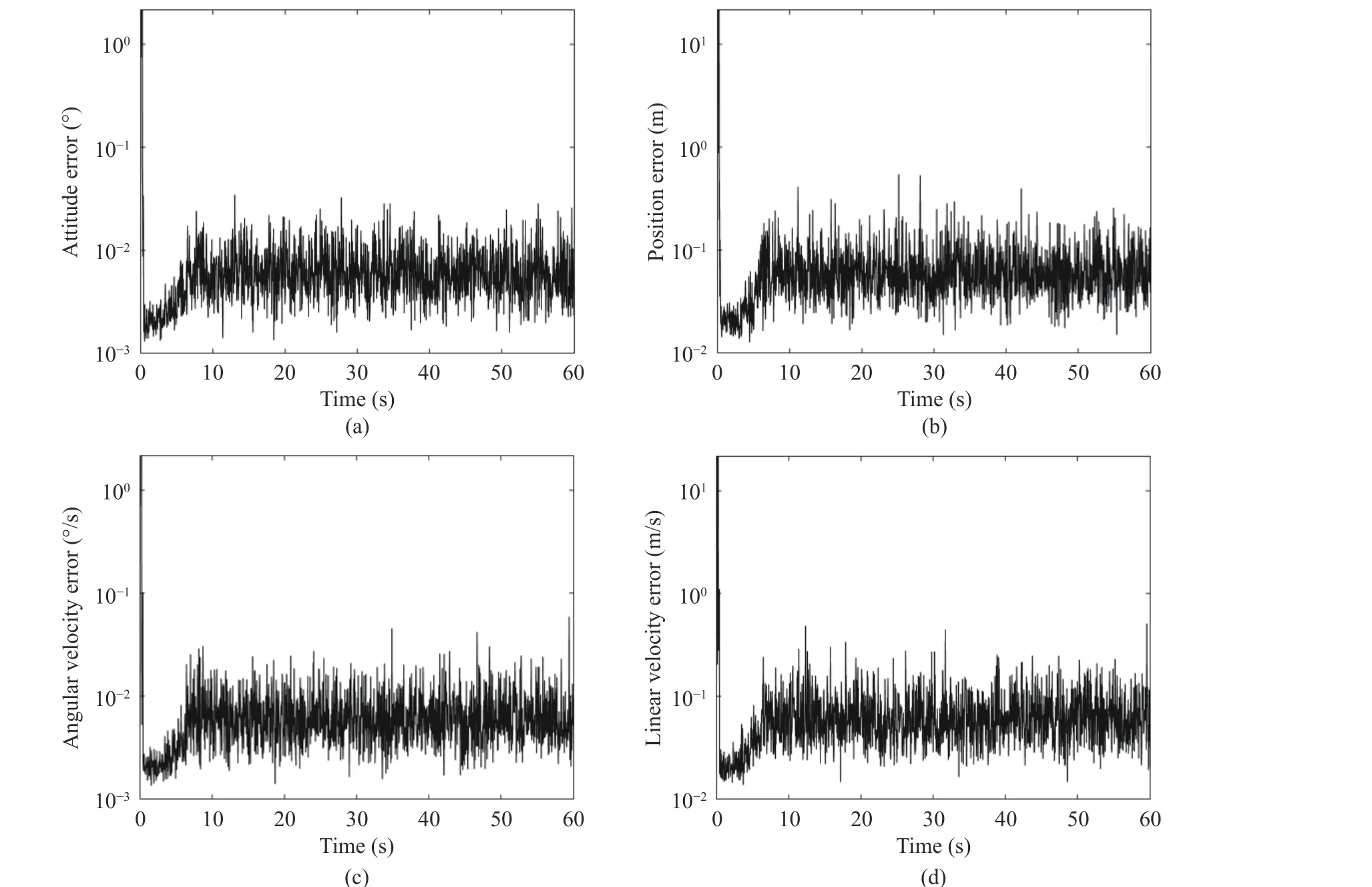
Fig. 2 Spacecraft pose estimation error: (a) attitude error; (b) position error; (c) angular velocity error; (d) linear velocity error

Tab. 1 RMSE and event rate for 100 simulations after 60 s
The simulation results show that the spacecraft pose estimation accuracy satisfies the basic mission requirements, and the bidirectional exchange frequency is greatly reduced. Although the event-triggered scheme includes two model iterations and the event scheduler, the results show that the average computation time required by MHE-based estimator is approximately 43.7 times of the average total computation time required by event-triggered estimator. Since the proposed scheme in this paper trigger the MHEbased estimator only when there are events, computational resources are saved significantly compared with time-triggered MHE. It should be noted that although the system communication rate can be reduced by increasing the trigger thresholdε, the performance of estimation is also affected. Besides, increasing the time domain window length can improve the estimation effect,but the cost is to reduce the computational efficiency.
5 Conclusion
In this paper, an event-triggered pose estimation strategy based on MHE is proposed to solve the problem of limited communication and computing resources of spacecraft in orbit. In order to reduce the communication burden of network caused by the high dimension of the system, the error dual quaternion is selected as the local state to reduce the system dimension and optimize the computational efficiency. At the same time, the event trigger mechanism is introduced to realize the spacecraft attitude-orbit coupled high-precision state estimation at low data exchange frequency. In this paper, the assumption that the spacecraft speed is measurable is made for estimator design. A possible continuation of the present work concerns the pose estimation of non-cooperative targets with unmeasurable speed.
杂志排行

Journal of Beijing Institute of Technology的其它文章
- Reliability Analysis of Repairable System with Multiple Closed-Loop Feedbacks Based on GO Method
- Security Control for Uncertain Networked Control Systems under DoS Attacks and Fading Channels
- Blood Glucose Prediction Model Based on Prophet and Temporal Convolutional Networks
- Fault Diagnosis Method Based on Xgboost and LR Fusion Model under Data Imbalance
- An Improved Repetitive Control Strategy for LCL Grid-Connected Inverter
- A Causal Fusion Inference Method for Industrial Alarm Root Cause Analysis Based on Process Topology and Alarm Event Data