宽转速范围永磁同步电机无位置传感器控制*
2022-08-25肖仁鑫胡海双
肖仁鑫,赵 晗,胡海双
(昆明理工大学a.交通工程学院;b.昆明物理研究所,昆明 650221)
0 引言
永磁同步电机(permanent magnet synchronous motor,PMSM)具有体积小、效率高的特点,目前已在工业、汽车、家电等领域得到广泛的应用。永磁同步电机矢量控制需要通过传感器获取转子位置,传感器的使用导致系统成本增加、可靠性降低、体积增大等问题。为克服这些问题,无位置传感器控制逐渐成为目前的研究热点[1]。
目前,永磁同步电机无位置传感器控制根据转速适用范围主要分为两类。一类为利用磁链信息或基频激励的反电动势进行转子位置和转速估计[2-4],主要适用于中高速区域;另一类为利用电机凸极特性获取转子位置信息,适用于零速和低速运行[5-7]。为了实现全速域的无传感器控制,需要将上述方法结合起来。秦峰等[8]通过加权函数将高频信号注入法和模型参考自适应法的观测值进行综合,实现了全速域范围的无传感器控制,但模型参考自适应算法对参数依赖大,鲁棒性差。BARNARD等[9]在低速和零速时采用任意注入法,中高速时采用有效磁链法,通过滞环控制来实现两种方法之间的过渡。田里思等[10]将高频信号注入与滑模观测器结合,使用锁相环代替反正切函数,但滑模增益为固定值,无法实现系统的快速响应。以上方法都比较复杂,若想实现全速域的无传感器控制,必需将其中两种方法结合起来,这将增加控制系统的实现难度。为了简化算法的复杂性,有学者将恒压频比(V/f)控制方法应用于低速零速区域[11],但V/f控制方法由于没有电流闭环,在电机启动或转矩突变时容易出现电流失控,严重时会损坏电子器件。
针对以上问题,本文提出了一种融合改进滑模观测器和I/F启动的新型无传感器控制方法,通过速度分区,零低速时采用I/F启动控制,中高速采用改进滑模观测器估算转子转速和角度,滑模观测器的增益使用模糊控制来进行优化。复合算法能够实现PMSM的带载启动及宽速域运行,与传统只使用滑模观测器的无位置传感器控制相比,有效地提高了转子位置和角度的估算精度,系统的动态性能更好。
1 零低速阶段启动方案
在零速及低速区采用具有电流闭环的I/F启动方式。I/F启动的方式即通过转速开环,电流闭环的方式进行控制。在q轴注入一定的电流矢量,同时保持d轴电流矢量为0,形成电流闭环,使转子加速启动。注入电流矢量的旋转频率根据负载的大小来设计,产生的虚拟角度用于永磁同步电机矢量控制中的坐标变换。
给定角速度ω*如式(1)所示,其中kf为转子角加速度,一般可根据电机的特点设计。给定电流矢量的旋转角度θ*与给定角速度ω*的关系如式(2)所示。
ω*=kft
(1)

(2)

图1 启动加速阶段坐标系
为了分析电机启动过程中的动态特性,假设给定位置角确定的坐标系为d*-q*虚拟坐标系,电机转子实际坐标系为d-q坐标系,实际坐标系与虚拟坐标系之间的夹角定义为θe,方向如图1所示。
I/F启动具有“转矩-功角自平衡”的特性,对于表贴式永磁同步电机,定子电流与电磁转矩之间的关系为:
Te=1.5pψsiq
(3)
式中,p是电机的极对数,定子电流可以表示为:
(4)
式中,iq*和id*分别是虚拟坐标轴上的给定电流,其中id*给定为0,将式(4)带入式(3)中可以得到电磁转矩的表达式为:
Te=1.5piq*cosθeψs
(5)
因此,在低速启动时的状态方程为:
(6)
式中,TL是负载转矩;J是电机的转动惯量。
只有当θe的一阶和二阶导数为0时,系统才能实现动态平衡,θe的二阶导数在任何情况下都不能恒定为正值,由此可得:
(7)
式中,TLMax是在启动时最大的负载转矩。
在启动加速阶段,虚拟坐标系与实际坐标系之间的夹角θe影响着电机的自平衡。首先,给定电流在q轴上的分量产生的电磁转矩一方面用以平衡负载转矩,另一方面产生加速度。cosθe与负载转矩为正相关的关系,这样电机转矩才能响应负载的变化。如图1所示,在0<θe<π/2时,随着电机负载转矩的增加,则电机实际加速度减小,θe减小,同时cosθe增大,产生的电磁转矩增加,电机加速度上升,使得两坐标系达到新的平衡,当负载转矩减少时也会出现类似的情况。在π/2<θe<3π/2时,初始转矩为负,电机将开始反转,此时负的ωe与正的ω*将使θe减小,直到0<θe<π/2。对于3π/2<θe<2π时,在此区域中,如果负载转矩增大,将导致θe快速减小,直到π/2<θe<3π/2,此时便与上面的情况相同。上述情况都是在电机启动过程中完成的,当电机启动起来之后便不会出现较大的波动。
2 高速阶段无传感器控制
2.1 滑模观测器设计
对于表贴式永磁同步电机而言,其定子交直轴电感相等,即Ls=Ld=Lq,则永磁同步电机在α-β坐标系下的电流状态方程为:
(8)
式中,iα、iβ为α-β轴上的定子电流分量;uα、uβ为α-β轴上的定子电压分量;eα、eβ为α-β轴上的反电动势分量;Rs是定子电阻;Ls是定子电感;φf是永磁体磁链;θ是转子角度;ω则是转子角速度。反电势eα、eβ为正弦波形,其值包含了电机转子角速度ω、转子角度θ和转子磁链φf的信息。因此,只要计算出反电势eα、eβ就可得到转子位置信息,进而估算出转子角速度。
设计滑模面s为:
(9)

(10)
构造滑模观测器:
(11)
式中,ksmo为滑模增益。由式(8)和式(11)得动态误差方程:
(12)

(13)
电机转速可由反电势得到:
(14)
转子位置则有:
(15)
2.2 观测器稳定性分析
构造Lyapunov函数来证明传统SMO稳定性。构造函数如下:
(16)
对其求导并带入式(12)中得:
(17)
ksmo>max(|eα|,|eβ|)
(18)
2.3 滑模增益的改进
在传统的滑模观测器中滑模增益ksmo一般为定值,固定的滑模增益无法同时满足响应速度和系统稳定的要求,较小的滑模增益会导致系统响应速度慢,较大的增益容易放大系统的抖振。本文提出的模糊滑模观测器在不改变切换函数的基础上,将模糊控制与滑模观测器进行融合,通过模糊控制调整滑模增益,实现整个闭环系统的高水平控制。

图2 滑模运动示意图
由图2可知,当系统趋近于滑模面后,便沿着滑模面做往复穿越运动,到达滑模面后,将会保持在滑模面上。其中滑模增益决定了到达滑模面的时间,ksmo值越大,越快到达滑模面,但是也会使系统发生震荡。

图3 模糊控制系统结构
将滑模增益设计为可随时间变化的函数:
ksmo=F(t)
(19)
式中,F(t)为通过模糊控制器输出的增益。输入变量和输出变量的模糊子集均设计为NB(负大)、NM(负中)、NS(负小)、ZO(零)、PS(正小)、PM(正中)和PB(正大),这七个子集涵盖了输入输出变量的取值范围。为使系统快速准确地到达滑模面,设计模糊控制规则,如表1所示。
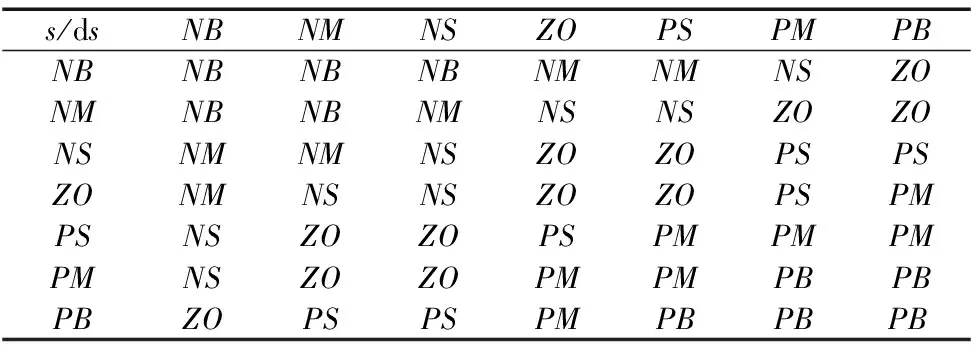
表1 模糊控制规则表
模糊控制器的输入s和ds中模糊子集的隶属度函数如图4所示,在滑模面附近,隶属度函数比较陡峭,使控制的灵敏度增高,在远离滑模面时,模糊子集的“核”几乎是平台,彼此距离比较远,有利于迅速向平衡点靠近。输出ksmo的模糊子集隶属度函数如图5所示,在平衡点附近,隶属度函数斜率很大,曲线陡峭,在平衡点外又距离相对较远。这样的分布同样可以使系统迅速靠近平衡点,并在平衡点处的控制精度更高。
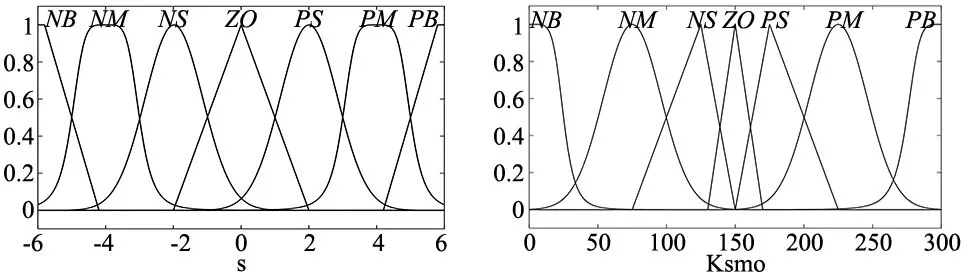
图4 输入变量的隶属度函数 图5 输出变量的隶属度函数
3 仿真及结果分析
综上所述,构建如图6所示的永磁同步电机全速域无位置传感器控制算法。启动阶段使用转速开环,电流闭环的控制策略;当电机反电动势增大,改进的滑模观测器可以准确估计转子位置时,将转速闭环,控制系统在全速域中运行。
为了进一步验证本文所提控制算法的正确性和有效性,选用表贴式永磁同步电机,在MATLAB/Simulink中搭建系统仿真模型,对系统进行仿真验证,电机仿真参数如表2所示。

表2 电机参数
设置仿真时间为0.5 s,电机空载启动,在0.1 s时加速到额定转速1600 r/min。分别对传统无位置传感器算法和改进的无位置传感器算法进行仿真。如图7所示为传统无位置传感器算法电机空载启动的动态响应,图8所示为改进算法的动态响应。

图6 永磁同步电机无位置传感器全速域控制框图

(a) 估算转速与实际转速 (b) 转速估算误差
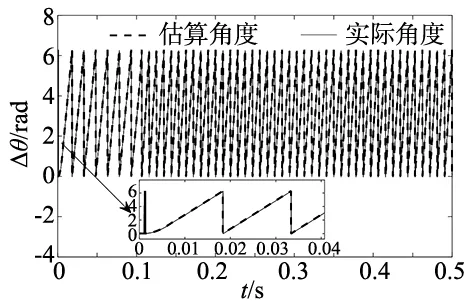
(c) 转子实际角度与估算角度
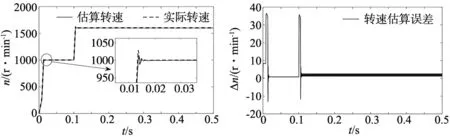
(a) 估算转速与实际转速 (b) 转速估算误差

(c) 转子实际角度与估算角度
从图7a和图8a中可以看出,在电机启动阶段,两种算法能够很好的跟踪转速,但传统方法调节时间长在0.017 s后才达到稳态,改进算法在0.01 s到达稳态;传统方法超调量为4.9%,改进算法超调量为2.6%。在0.1 s转速突变时,传统方法的动态响应均比改进算法差。从图7b和图8b中可以看到,传统方法转速误差在15 r/min左右,改进算法转速误差可以控制在4 r/min以下。从图7c和图8c中可以看到,在电机启动阶段,传统方法转子位置估计误差大,改进算法运用I/F启动之后,转子位置估算精度明显提高。从两种方法的对比上来看,本文所提无位置传感器控制算法能够使电机平稳启动,并且准确估计转子位置和转速,具有良好的性能。
为了验证本文所提算法的带载启动时转子速度及角度的估算精度,设置仿真时间为0.5 s,施加60%的负载,即6 N·m使电机转速从0 r/min加速到额定转速1600 r/min。仿真波形如图9所示。
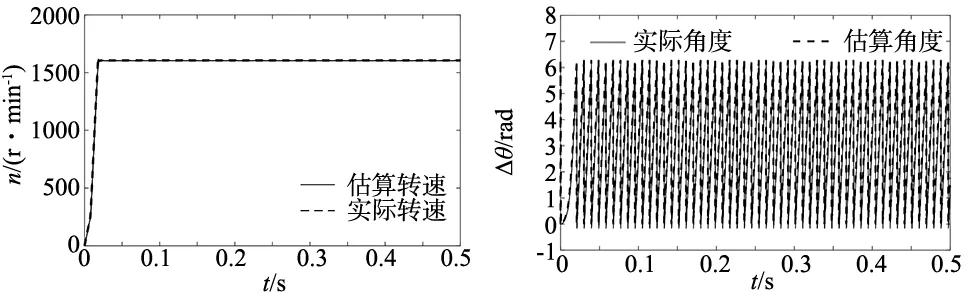
(a) 估算转速与实际转速 (b) 转子实际角度与估算角度
从图9中可以看出,增加负载后,电机依然能够平稳启动,在I/F启动完成后过渡到改进的滑模观测器算法时,转速和转子位置还是能够精确估算。在过渡到改进滑模观测器后,系统运行平稳,具有较好的观测性能。
4 结论
本文以表贴式永磁同步电机为研究对象,在传统滑模观测器的基础上,提出一种融合改进的滑模观测器和I/F启动的新型无传感器控制方法。低速区域使用I/F启动的策略,有效避免滑模观测器在低速时观测精度低的问题,仿真结果表明,该方法能够使电机平稳带载启动。在中高速区,使用模糊算法对滑模增益进行优化,改进后的滑模观测器在转子位置估计和转速估计上都具有更高的观测精度。
