移动机器人导航路径的Halton采样-先验RRT*规划*
2022-08-25梅占勇马晓慧
陈 娟,梅占勇,马晓慧
(1.山西工程科技职业大学,太原 030031;2.成都理工大学计算机与网络安全学院,成都 610059)
0 引言
机器人可以在环境恶劣、危险等人类受限条件代替人类工作,不仅可以将人类从重复劳动中解放出来,而且提高了工作效率和工作质量,因此机器人在航空航天、医疗、服务、生产制造等行业得到越来越广泛应用[1]。路径规划是机器人实现自主导航的基础,也是完成其他任务的前提,行驶路径质量对机器人工作效率、工作质量、使用寿命、工作能耗等关键性能具有极大影响[2]。因此,机器人路径规划方法的研究具有重要的经济价值和使用价值。
移动机器人的工作环境是复杂多样且多变的,根据环境信息先验知识的多少,一般将路径规划分为全局规划和局部规划两类。从规划目标看,全局路径规划是在静态环境中规划出可行路径,且实现时间最少、路径最短、能耗最低等优化指标;而局部路径规划是在动态环境中规划出安全无碰、相对较优路径,更加强调安全性和灵活性[3]。本文研究全局路径优化问题,因此着重对全局路径优化方法进行分析。从整体规划思路讲,全局路径规划可以分为启发式方法、随机扩展方法、智能规划法两类。启发式方法思路是构造距离启发信息,使用类似贪婪思想优先选择最小代价的路径点,比如A*算法、D*算法等,A*算法在简单环境下搜索效率较高,但是在大规模复杂环境下规划效率低、实时性差;D*算法对环境多样性的适应能力较强,且能够在动态环境下应用,但是存在路径转弯多、不平滑的问题[4]。高鹏等[5]针对果园应用背景的机器人,使用启发函数减小A*算法的贪婪度,有效提高了路径质量。随机扩展方法思路是节点随机生长,当扩展至终点时得到了全局路径,比如RRT、RRT*算法等[6],此类方法主要缺点是效率低、路径不平滑。叶鸿达等[7]提出了双向生长RRT*算法,并将该算法规划出的路径进行剪枝处理,有效减小了路径长度。智能规划方法是依赖智能算法的一类规划方法,比如神经网络、粒子群算法等,该类方法规划的路径质量主要依赖模型质量与算法性能[8]。随着机器人应用环境和场景的多样性,单一方法规划的路径质量难以满足指标要求,路径规划方法也会进行融合和多样化。
针对RRT、RRT*算法存在的效率低、路径不平滑等问题,本文在RRT*算法中加入了基于先验知识的目标偏置策略、基于Halton采样的候选点集策略、剪枝与平滑策略,从而提出了基于Halton采样-先验RRT*算法的路径规划方法,有效提高了算法的路径规划效率,同时减小了路径长度、提高了路径平滑性。
1 环境模型与算法分析
1.1 环境模型与碰撞检测
在路径规划研究中,一般将机器人视为一个质心,但是机器人本身是有尺寸的,这种简化方式会降低机器人行驶安全性。为了解决这一问题,需要将障碍物进行膨化处理,将机器人最大半径记为ϑ,则障碍物沿其最外侧轮廓向外膨胀ϑ,就实现了障碍物膨化处理。以二维空间三角形障碍物为例,膨化过程如图1所示,图中虚线三角形为障碍物自身尺寸,实线三角形为膨化后的障碍物尺寸。障碍物膨化处理本质是将机器人尺寸转移到障碍物上,从而将机器人视为一个质点。
通过计算法对机器人和障碍物的碰撞情况进行判断。首先将障碍物规则化为圆形或者多边形,以三角形为例对计算法进行介绍,如图2所示。
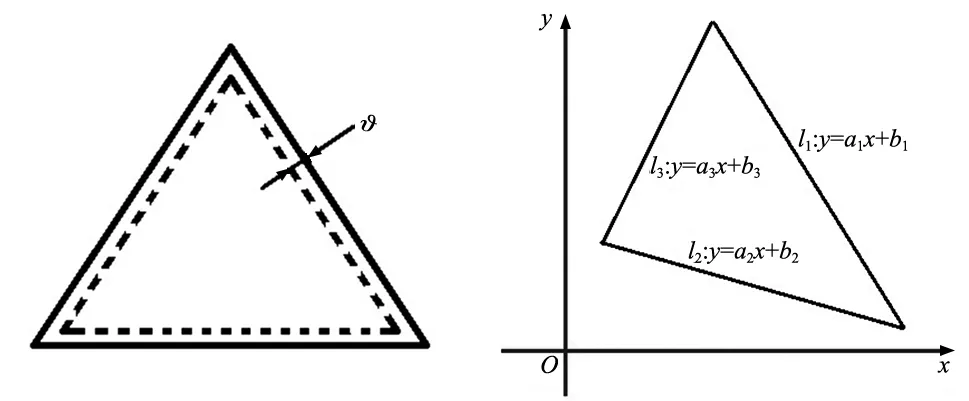
图1 障碍物膨化处理 图2 碰撞计算法
将机器人路径各段路径总合记为{Pathi},则当下式存在解时说明机器人路径与三角形障碍物发生碰撞,当无解时说明机器人与三角形障碍物不发生碰撞。
(1)
1.2 RRT*算法原理及分析
快速扩展随机树(rapidly-exploring random tree,RRT)算法以出发点为根节点,以随机生长的方式使节点逐步扩展到目标点,具有概率完备性的特点[9]。RRT算法的随机扩展方式,使算法的路径规划效率和质量略低。RRT*算法在原算法基础上增加了父节点重选择策略和重新布线策略[10],一定程度上提高了路径质量。
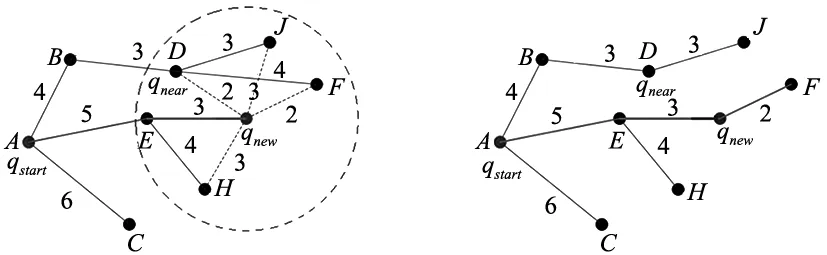
(1)父节点重新选择策略。根据RRT算法原理扩展出新节点qnew,而后以qnew为圆心和设定半径画出一个圆,圆内的所有节点为qnew的可选父节点,从中选择出从起点到qnew长度最短的路径,对应节点为重新选择的父节点。如图3a所示,虚线圆内的节点为qnew的可选父节点,包括E、F、H、J共4个。
可选父节点对应的路径及长度如表1所示。
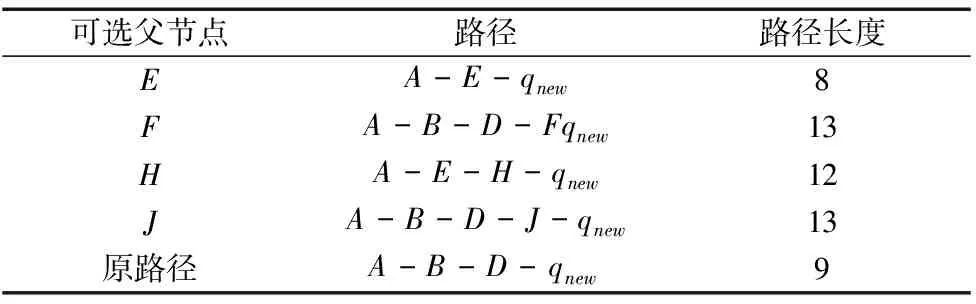
表1 可选父节点对应路径
由表1可知,将节点E作为父节点,可以得到从起点到当前节点qnew的最短路径,因此将E重置为父节点,得到新路径如图3b所示。
(a) 父节点重规划前 (b) 父节点重规划后
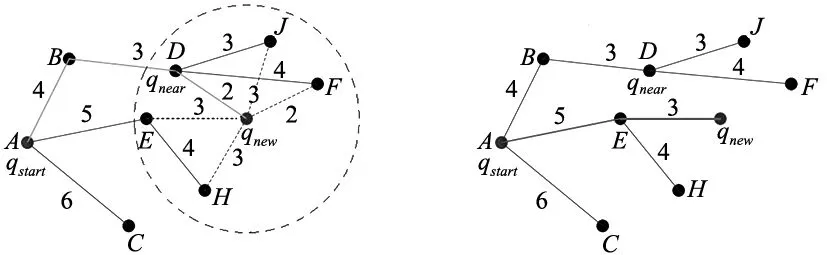
(2)重新布线策略也可理解为“qnew做谁父节点的问题”,该策略执行方法为以qnew为圆心和设定半径画出一个圆,圆内的所有节点为qnew的可选子节点,若将qnew作为父节点后的路径长度有所减小,则可以将qnew作为该节点的父节点。如图4a所示,虚线圆中节点D、F、H、J均可作为qnew的子节点。
图4a中路径在重新布线前后的路径长度比较如表2所示。
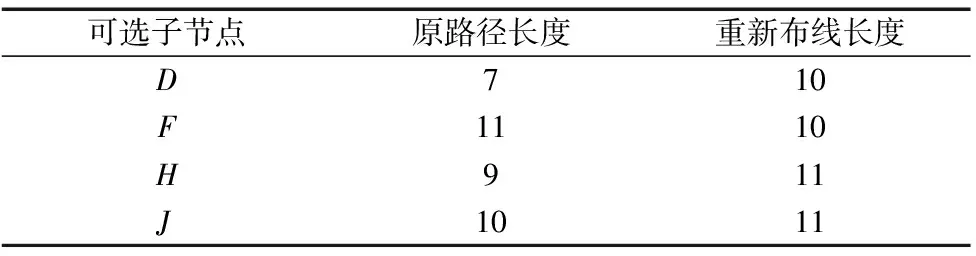
表2 重新布线路径对比
由表2可知,若将qnew作为父节点,节点F对应的路径长度减小,其余节点对应路径长度增大。因此,将节点F作为qnew的子节点,其余路径保持不变,得到重新布线后的路径如图4b所示。
(a) 重新布线前 (b) 重新布线后
由上述理论介绍和分析可知,RRT*算法的父节点重新选择和重新布线策略可以有效提高路径质量,减小路径长度。但是RRT*算法仍存在一些问题:①它是一种完全随机的路径规划方法,没有使用目标点位置、障碍物分布等先验知识;②规划后路径没有进行再次优化,路径存在冗余节点和不平滑等问题。
2 Halton采样-先验RRT*算法
2.1 基于先验知识的目标偏置策略
RRT*算法仍以随机扩展方式进行路径规划,使得算法的规划效率较低。为了提高算法的规划效率,本节提出了基于先验知识的目标偏置策略。其核心思想是设置一个控制概率σ和随机数p∈(0,1),当p<σ时路径朝目标方向扩展,当p≥σ时路径朝随机方向扩展。具体分为以下3个方面:
(1)若p≥σ,则采样点xsample=xgoal,在xnearest→xgoal方向上扩展出新节点xnew,若xnew节点满足无碰约束,则将xnew添加到随机树节点中,如发生碰撞则进入随机采样策略;
(2)若p<σ,则采样点xsample=xrand,在xnearest→xrand方向上扩展出新节点xnew,若xnew节点满足无碰约束,则将xnew添加到随机树节点中,如发生碰撞则重新采样。
控制概率σ根据机器人周围的障碍物分布进行设置,当机器人周围障碍物较少时设置较小的σ,使随机树大概率向目标扩展,加快算法收敛;当机器人周围障碍物较多时设置较大的σ,使随机树大概率随机扩展,提高路径多样性。按照上述思想,控制概率σ设置为:
(2)
式中,σ∈[0.2,0.8]为控制概率;d为当前位置的障碍物分布;dmax、dmin为相应的最大值和最小值;θd为机器人一步范围内存在障碍物的累计角度范围,单位为 °,依赖机器人探测得到。
2.2 Halton采样与候选点集策略
在标准RRT*算法中,随机点qrandom的产生按照伪随机采样的方式产生,伪随机采样点容易产生聚集、不均匀、不合理等问题。相对而言,Halton采样具有空间分布均匀、覆盖性好等优点。Halton序列是基于质数产生的,以某一质数δ为例,Halton序列第m个数据产生方法为[11]:
步骤1:将m表达为δ进制数,为:
(3)
式中,I为mδ表达为δ进制的位数。

以在[0,1]×[0,1]平面上采样为例,使用随机法和Halton序列在此平面内各采样1000个点,其中Halton序列X轴和Y轴质数分别取为2和3,结果如图5所示。

(a) Halton采样 (b) 随机采样
对比图5a、图5b可知,Halton采样点在空间中的均匀性和覆盖性极好。而随机采样点存在聚集区域和稀疏区域,图5b中使用方框框出了一个聚集区域和两个稀疏区域。聚集区域的出现会使算法重复性搜索同一区域,降低算法效率;稀疏区域的出现使算法难以搜索到该区域,可能难以规划出最优路径。因此,本文使用Halton采样代替随机采样。
在标准RRT*算法中,随机点为惟一可选的扩展方向,为了筛选出最优扩展方向,采样阶段不再产生一个候选点,而是基于Halton序列产生一个候选点集,从候选点集中选择出采样点并扩展。如图6所示,圆圈中的点集为依据Halton序列产生一个候选点集。

图6 候选点集示意图
从候选点集中基于欧式距离和转弯角大小选择出最优采样点,评价函数Q构造为:

(4)
式中,C1=0.3为转角权值;C2=0.7为距离权值;λn为归一化的转角值;An为候选节点qn的转角,定义为矢量qparentqnear与qnearqn之间的夹角,其中qparent为qnear的父节点;Amax、Amin分别为转角最大值和最小值;Dn为归一化的距离;Sn为候选节点qn与目标节点qgoal的距离;Smax、Smin分别为距离最大值和最小值。
最优采样点确定方法为:若qnear与候选节点qn方向一步距离范围内存在障碍物,则评价函数Q直接设置为无穷大;若qnear与候选节点qn方向一步距离范围内不存在障碍物,则计算评价函数Q,选择出Qmin对应的节点为最优采样节点。
2.3 剪枝与平滑
基于RRT*算法规划出的路径存在冗余节点和路径不平滑的问题,因此在规划出初步路径后必须进行剪枝和平滑处理。
剪枝方法可以分为从根部剪起和从叶部剪起两类,根据任务特点,本文使用从叶部剪起的方法。具体操作为:首先,直接连接起点qstart和终点qend,若两者之间无障碍物则路径规划完毕;否则,将连接点前移,判断qstart与qend前一节点之间是否有障碍物,按照上述方法依次将连接点前移,直至找到一个非碰撞连接点;而后,将起点与该点连接,并将该点重置为新起点qstart,重复上述操作,直至与终点相连接,剪枝过程结束。
本文使用三次B样条曲线对剪枝路径进行平滑,N次B样条曲线多项式为:
(5)
式中,P(t)为N次B样条曲线;Pi为控制点;Fi,k(t)为基函数,其表达式为:
(6)
式中,t∈[0,1];i∈(0,1,…,m)。
当N=3时,可得三次B样条曲线为:
(7)
式中,P0~P3为控制点。
3 仿真验证与分析
3.1 二维空间路径规划
使用仿真的方法对Halton采样-先验RRT*算法的路径规划性能进行验证,仿真环境为Win 10操作系统,处理器为Inter(R) Core(TM) i5-10210U CPU@1.6 GHz 2.11 GHz处理器,内存为16 GB。
首先在40 m×40 m规模的二维空间中进行性能比较,设置一个由不规则障碍物组成的狭窄通道环境,起点设置为(1 m,1 m)位置,终点设置在(40 m,40 m)位置。分别使用标准RRT*算法、文献[12]改进RRT*算法、本文Halton采样-先验RRT*算法规划出最优路径,3种算法各自独立运行50次,首先给出最优路径如图7所示。

(a) 标准RRT*算法 (b) 文献[12]改进RRT*算法

(c) Halton采样-先验RRT*算法
对比图7中3种算法的规划结果可以看出,RRT*算法由于完全随机的扩展和生长方式,使得随机树几乎长满了所有无障碍物区域,才规划出一条相对较优的路径,这意味着标准RRT*算法的规划效率较低。相比较而言,文献[12]改进RRT*算法的扩展节点极大减少,这是因为文献[12]改进RRT*算法中使用了目标偏置策略,在目标牵引作用下使得随机树的扩展节点极大减少。本文Halton采样-先验RRT*算法规划路径的扩展节点最少,这是因为本文不仅使用了目标偏置策略,而且使用了候选点集策略,能够从点集中选择出最优采样点,极大减少了随机树扩展的节点数量。
为了定量地比较3种RRT*算法的路径规划性能,统计50次规划路径的节点扩展数量均值、算法耗时均值、路径长度均值,如表3所示。

表3 路径参数比较
由表3可知,Halton采样-先验RRT*算法的扩展节点数量最少,规划耗时最少,且路径长度均值最小。这是因为本文根据先验知识使用了目标偏置策略,使得树节点在扩展时的方向性和目的性较强;另外,本文还使用了候选点集策略,从候选点集中选择出最优采样点,能够有效减少树节点尝试扩展的数量,因此Halton采样-先验RRT*算法的扩展节点数量最少;也是因为其节点扩展的尝试次数较少,使得算法规划耗时远小于另外两种算法。最后在剪枝和平滑作用下,路径长度也小于另外两种RRT*算法。
3.2 三维空间路径规划
在同样的仿真环境下,设置一个20 m×20 m×20 m的三维地图,机器人起点坐标为(0,0,0),重点坐标为(20 m,20 m,20 m)。三维环境中设置6个球形障碍物,障碍物半径及位置分布如表4所示。

表4 障碍物尺寸及位置
仍然使用3.1节的3种RRT*算法各自独立规划50次,得到的最优路径如图8所示。

(a) 标准RRT*算法 (b) 文献[12]改进RRT*算法
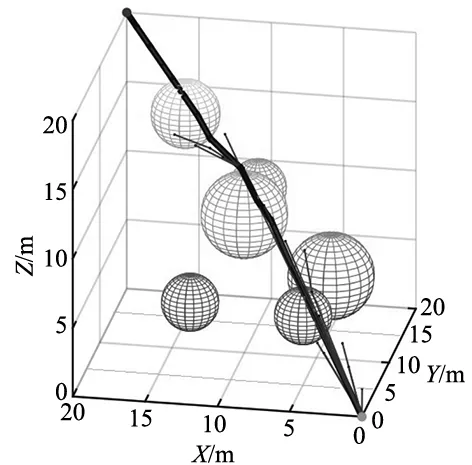
(c) Halton采样-先验RRT*算法
由图8可以直观看出:标准RRT*算法的扩展节点数最多,这导致标准RRT*算法的规划效率较低;文献[12]改进RRT*算法的扩展节点数量居中,Halton采样-先验RRT*算法规划过程中的扩展节点数最少,说明本文RRT*算法的规划效率最高。将3种RRT*算法在50次规划中的扩展节点数量、规划耗时、路径长度以图形形式给出,结果如图9所示。

(a) 扩展节点数量 (b) 规划耗时

(c) 路径长度
结合图8和图9可以看出:①在路径规划过程中,Halton采样-先验RRT*算法的节点扩展数量最少,且波动极小;②Halton采样-先验RRT*算法的路径规划耗时最小,且远远少于另外两种算法;③从路径长度的角度看,Halton采样-先验RRT*算法规划的路径最短、波动最小,且远小于另外两种算法。上述参数说明,Halton采样-先验RRT*算法的规划性能最佳,且波动最小。这是因为本文使用了目标偏置策略,使节点在扩展时的方向性和目的性较强;另外,本文的候选点集策略,可以从点集中选择出最优采样点,能够有效减少树节点尝试扩展的数量,因此Halton采样-先验RRT*算法的扩展节点数量最少、规划效率最高。最后在剪枝和平滑作用下,路径长度也小于另外两种RRT*算法。
在二维和三维环境下的路径规划结果表明,Halton采样-先验RRT*算法在机器人路径规划中可以减少路径长度、提高规划效率,因此具有一定的优越性。
4 结论
本文研究了移动机器人在二维和三维环境下的路径规划问题,在RRT*算法中添加了基于先验知识的目标偏置策略和基于Halton采样的候选点集策略,提出了基于Halton采样-先验RRT*的路径规划方法。经验证得出以下结论:①基于先验知识的目标偏置策略可以有效减少扩展节点数量,提高规划效率;②候选点集策略可以选取出最优采样点,因此可以减少节点扩展尝试次数;③剪枝和平滑策略可以有效减小路径长度。