混合型配电线路故障定位技术探讨
2022-08-19刘淼,于力,杨鹏
刘 淼,于 力,杨 鹏
(1.沈阳工程学院 电力学院,辽宁 沈阳 110136;2.海南电网有限责任公司三亚供电局,海南 三亚 572000)
目前,我国的配电线路在传统的供电网络的基础上发展成了越来越多的电缆-架空线混合型线路。由于电缆线路存在运行环境差、制造工艺不完善等问题,导致了电缆线路的绝缘水平降低,电缆线路经常发生接地故障。另外,架空线路也常常由于绝缘子的质量问题、恶劣的环境等原因产生故障。当电力线路发生故障时,为了避免发生更大的系统故障和经济损失,应尽快确定故障点的位置,排除故障,恢复供电[1]。
1 电力线路故障测距的方法
在电力系统发生故障后,线路故障点处的电压和电流信号会突然发生变化。由于在故障位置处会发出故障暂态电信号,人们可以通过这些故障特征量来对故障所在线路以及故障地点进行区段定位,并且通过不同的故障测距方法计算出故障点与测量点的距离。随着电力线路故障测距方法的不断发展,根据故障定位算法原理可以分为阻抗法和行波法两大类;如果依据故障测距所利用的电气量的来源进行分类,也可以把测距方法分为单端测距法和双端测距法两类[2]。
1.1 阻抗法
阻抗法[3-4]是依据故障时所测得的电压、电流值来计算出故障回路的阻抗值,根据线路长度与阻抗值之间的正比关系,通过推算得到故障点距测量点之间的距离,原理如图1所示。
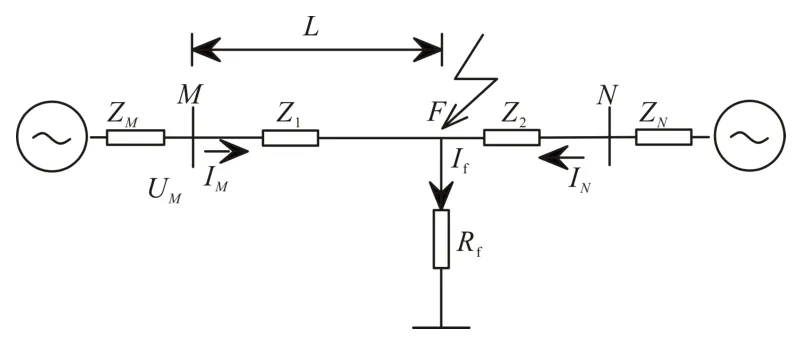
图1 阻抗法原理
假设F点发生接地故障,故障点与测量点M之间的距离为L,故障点经过渡电阻Rf接地,测量阻抗可由电压、电流的关系式联立推导:
则M端测量阻抗为

阻抗法原理简单,容易实现,在故障定位的过程中可以利用继电保护设备获取数据,无须额外添加检测设备。但是,接地阻抗、系统的运行方式、电流互感器饱和及线路三相不平衡等问题都会造成阻抗法测距失准。由于阻抗法误差大、适应能力弱,在实际应用中测距的效果并不理想,甚至会得出错误的测距结果。由于阻抗法受系统运行方式和配网终端负荷的影响比较大,对于现阶段越来越复杂的多分支的混合型配电线路,有“伪故障点”现象出现,导致测距失效。
1.2 行波法
行波法[5]是根据在传输线路发生故障之后出现的暂态电磁波进行故障测距的方法。电力线路发生故障后,由于虚拟附加电源的作用,故障位置处将会产生频率很高的暂态电压和电流行波。行波从故障位置处沿着故障线路以一定的传播速度向两侧运动,在遇到波阻抗不连续的节点或者是混联线路的连接点时会发生折反射现象,之后继续前进,直至行波衰减至零。所以,可以通过高速波头采集系统检测暂态初始波头、折射波及反射波运动到测量装置的时间,确定故障位置。行波法受故障点处的过渡电阻、互感器误差的影响小,测量精度较高。目前,电力网中的故障测距大部分都是应用行波法以及它的改进算法。行波法根据故障检测点的数量可以分为单端测量法和双端测量法。其中,单端测量法又可以分为A、C、E和F 型4 种测距方法;双端测量法分为B 和D 型两种测距方法[6]。
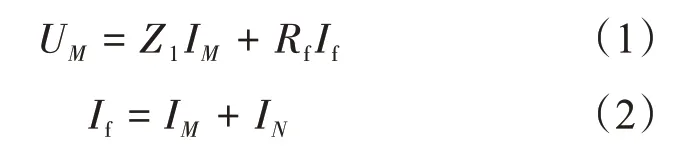
在电力线路出现故障后,故障位置处产生的电流(电压)行波在故障点与测量点之间往返运动。设初始行波运动到母线A端的时刻为t1,到达母线后行波会发生折反射,初始行波的反射波向故障点方向传播,到达故障点后,由于故障点的波阻抗不连续,再一次发生折反射,其折射波向母线A端传播,到达母线A端的时刻设为t2,利用行波往返一次的时间t2-t1以及已知的行波波速v来确定故障点的位置,这种方法就是A 型单端测距法[7-8],原理如图2所示。
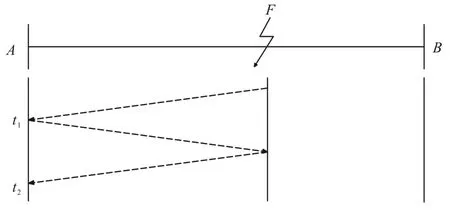
图2 A型单端行波法原理
故障点到测量点的距离x为
C、E 和F 型单端行波法的测距原理与A 型单端法类似,区别在于测距所用的电信号来源不同:C 型单端法利用的是脉冲发生器注入故障线路的高频信号,E 型单端法利用的是自动重合闸装置在合闸动作时产生的暂态行波,F 型单端法利用的是断路器分闸动作时产生的暂态行波。
单端行波法是根据在电力线路A侧检测到的暂态行波电气量进行故障定位的,所以只需在线路A端装设故障测量装置。这种测距方法的优点在于原理简单、使用的测量设备少、系统的可靠性高、检修难度低,其定位精度不受接地电阻、发生故障的类型、故障初始角度的影响,测距时受到的干扰小;缺点在于故障点反射行波的检测识别较为困难,导致测距结果的可靠性低。
双端测距法仅需检测故障初始行波运动到线路两端的时间即可进行故障定位。设故障点产生的故障初始行波到达母线A端的时间为t1,到达母线B端的时间为t2,利用t1、t2及已知的行波波速来确定故障点的位置,这种方法就是D 型双端测距法[9-11],原理如图3 所示。双端测距法除了比单端法多一个测量点外,还需在电力线路两端装设时钟同步系统和高速数据采集装置。
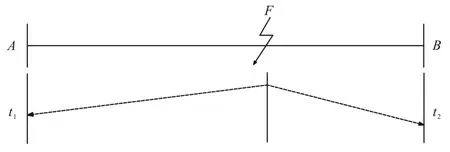
图3 D型双端行波法原理
设故障点到母线A端的距离为x1,故障点到母线B端的距离为x2,母线A端到母线B端的距离为L,则x1=vt1,x2=vt2,x1+x2=L。
故障点到A端测量点的距离x1为

B 型双端行波法的测距原理与D 型双端法类似,区别在于B型双端法采用脉冲发生器向发生故障的线路注入高频信号,并以此作为测距信号。
双端行波法利用线路两侧装设的测量装置进行故障点的定位,不需要对故障点的反射波及端母线的反射波进行区分识别,测距的精确度及可靠性较高。
2 电缆-架空线混合型配电线路故障测距的方法
目前,行波法在单一电力线路的故障测距中的应用已经十分成熟,但是混合型配电线路相比输电线路结构繁杂、分支线路众多。将传统的行波法直接应用于混合型配电线路中进行故障测距时,由于电缆和架空线路的波阻抗不同,导致故障行波在故障点及线缆连接点处都会发生严重的折反射,很难准确获取故障行波波头到达测量点的时刻。此外,故障行波在电缆和架空线路中以不同的速度传播,导致无法根据传统的行波测距公式定位故障点,造成测距困难。所以,现有的电缆-架空线混合型配电线路故障测距的方法主要是针对混合型配电线路的特点对行波故障测距法进行改进。将行波法应用于混合型配电线路故障测距的关键点在于准确获取故障行波波头的到达时刻及确定行波波速。
2.1 故障行波波头到达时刻的准确获取
在混合型配电线路中,电缆和架空线路交替频繁,而且它们的结构和特性有很大差异,导致了配电线路中除母线外还存在着多个波阻抗不连续的点。当线路上发生故障时,故障点处产生的故障行波沿线路向两侧母线运动,会发生严重的折反射现象,使故障初始行波波头幅值出现衰减。在行波故障测距方法中,无论是单端行波法还是双端行波法都需要精确记录故障初始行波波头到达测量端的时刻,这对行波法的故障测距精度有很大影响。应用于故障测距的信号特征提取的分析方法有傅里叶变换法(FT)、小波分析法(WT)、希尔伯特-黄(HHT)、集合经验模态分解(EEMD)和变分模态分解(VMD)等。
傅里叶变换[12]是经典的时域信号处理与分析方法,能够实现时域和频域的变换,但是无法对频域信号进行局部分析,只能对完整时间域的信号进行分析,对于具有突变性质的非平稳故障信号,傅里叶变换不能有效分析。因此,傅里叶变换理论应用于故障信号分析时具有很大的局限性。
小波变换[13-18]克服了经典傅里叶变换难以进行时频域信号局部分析的缺点,比傅里叶变换理论具有更好的局部时域的分析能力。小波变换的模极大值点即为暂态行波突变点,该突变点对应着行波波头到达测量端的时间。因此,常常通过小波变换准确标定故障波头时刻。应用小波变换法时,需要对小波基函数和分解尺度进行选择,不同的选择方案,直接影响着故障测距的精度。这也是将小波分析应用于故障测距的研究重点之一。
希尔伯特-黄变换[19-23]包括经验模态分解(EMD)和Hilbert变换。首先,通过经验模态分解,将复杂的多种频率混叠的非平稳信号分解成多个固有模态函数(IMF);其次,对最能反映暂态信号本质特征的IMF函数分量进行希尔伯特变换,得到该分量的瞬时频率,第一个瞬时频率的极值点即为行波波头到达测量端所对应的时刻。希尔伯特-黄变换无需面临选择小波基函数和分解尺度的难题,具有自适应性。但是,该方法在受到噪声干扰时会产生模态混叠现象,影响测距效果。
集合经验模态分解[24-26]在对原始信号进行分解时不断加入适当的白噪声,将全部IMF分量进行多次计算后取其平均值,这在一定程度上解决了端点效应,抑制了模态混叠的现象。
变分模态分解[27-28]通过构造和求解变分问题,并以所有IMF 分量的估计带宽之和最小作为目标函数,对故障暂态行波信号进行分解,这种识别波头的方法有效地解决了模态混叠问题,降低了噪声的干扰,能够对波头进行精确标定。但是,应用变分模态分解信号时,需要提前设定适当的模态数K和二次惩罚因子α,不同的取值对应着不同的分解结果,需要根据所研究的问题,确定参数的选择。
2.2 行波波速的确定
混合型配电线路是由电缆和架空线路共同构成的,行波在这两种传输线上运动的速度不一致,这导致行波法无法根据确定的波速度进行测距,造成测距困难。
2.2.1 基于时差零点的故障搜索算法
文献[29-31]提出了基于混合线路时差零点的故障搜索算法。时差零点定义:混合线路上某一点产生的行波运动到两端测量点的时间相等,如图4中所示A点。

图4 混合线路
基于时差零点的故障测距算法步骤如下:
1)确定混合线路MN的电气组成、各段线路的长度(设混合线路中架空线1 的长度为x1,电缆的长度为x2,架空线2 的长度为x3)、行波在架空线路中运动的速度v1和电缆中的运动速度v2。
2)逐一计算行波在每段线路上运动的时间。图4 中架空线1 区段、电缆区段、架空线2 区段行波运动的时间分别为ta=。
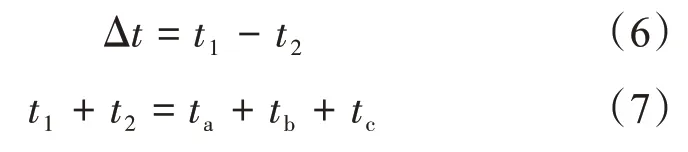
3)设故障初始行波波头运动到两端测量点M、N的时间分别为t1和t2,时间差Δt=t1-t2。
4)通过时间差Δt来确定故障搜索方向及故障点与时差零点之间的距离。若Δt<0,则故障点位于时差零点A与测量点M之间;若Δt>0,则故障点位于时差零点A与测量点N之间。行波从时差零点A出发沿故障搜索方向运动Δt/2,到达的点就是故障点F。
2.2.2 基于时间变量的故障搜索算法
文献[32-34]提出了一种基于时间变量的故障搜索算法。该算法根据每段线路的长度和不同线路上行波的波速将每条线路的空间长度转换为相应的时间长度,然后按照从线路的始端到末端的顺序搜索故障对应的时间,得到故障点所在位置。
基于时间变量的故障测距算法步骤如下:
步骤1)和2)与基于时差零点的故障搜索算法相同。
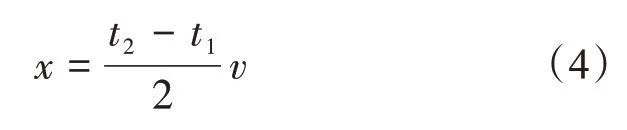
3)设故障初始行波波头运动到两端测量点M、N的时间分别为t1和t2,则
由以上两式联立即可解出时间t1和t2:
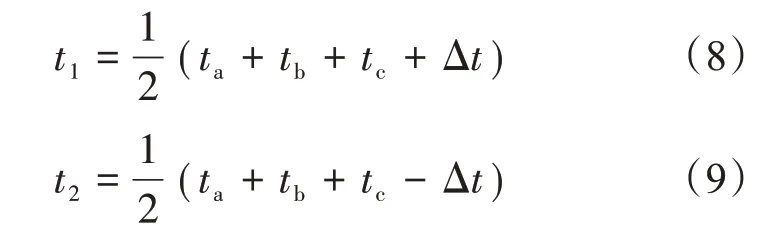
从测量点M端进行故障搜索,当t1<ta时,故障点位于架空线1区段内,利用d=v1t1即可求得故障点和测量端M的距离;当ta<t1<ta+tb时,可得故障点位于电缆区段内,利用d=x1+v2(t1-ta)即可求得故障点和测量端M的距离;当ta+tb<t1<ta+tb+tc时,可得故障点位于架空线2 区段内,利用d=x1+x2+v1(t1-ta-tb)即可求得故障点和测量端M的距离。同理,也可以从测量点N端开始比较,这里不再赘述。
2.2.3 基于波速归一化的故障搜索算法
文献[35-36]提出了一种将混合线路的波速归一化的算法,设行波在架空线路中运动的速度为v1,电缆中的运动速度为v2,混合线路中架空线1 的长度为x1,电缆的长度为x2,架空线2 的长度为x3,如果将电缆换算为架空线路,则换算系数k=,换算后线路总长度x'=x1++x3。首先,通过传统测距法确定换算后线路的故障点的位置;其次,折算到混合型线路中,得到实际的故障点位置。波速归一化的方法在理论上消除了波速不连续对故障测距的影响。
上述3 种方法可以有效解决混合型配电线路中行波波速不连续的问题。因此,常应用于混合型配电线路的行波测距中。但应注意的是前两种方法均是以双端测距法作为基础的,需要在线路两端安装测量装置,采集故障初始行波波头到达的时间信息,而且要求配置高精度的时间同步系统和数据采集系统,防止出现较大的测距误差。最后一种方法对测距没有强制要求,既可以应用单端测距法也可以应用双端测距法,这种方法对同步时钟也有很高的要求,以保持时间的同步性。由于这些方法对时间同步系统以及数据采集系统的精确度要求过高,在实际应用时,测距精度很难保证。
3 结语
针对以上提出的行波法应用于混合型配电线路故障测距的几个难点,并综合已有研究成果,提出了几点建议:
1)在混合线路中,线路结构复杂,混合线路及分支线路多,而行波法定位精度不受接地电阻、发生故障的类型、故障初始角度的影响,测距时受到的干扰小,将其应用到混合型配电线路中具有较高的可行性。
2)双端行波测距法相比于单端行波测距法,无需识别行波的波头性质,测距精度高,应推广使用。
3)将行波测距法应用于混合型配电线路中,应特别注意故障行波波头到达时刻的准确获取以及对行波波速不一致问题的处理。