小型化道路积雪清扫压块装置研制
2022-08-17罗春阳王开宝王明旭贾诚心曾永阳王立才郭庆东
罗春阳,唐 爽,王开宝,王明旭,贾诚心,曾永阳,陆 月,王立才,郭庆东
(1.北华大学机械工程学院,吉林 吉林 132021;2.兵器工业集团524厂,吉林 吉林 132021)
我国北方地区冬季降雪时间长、雪量大、范围广,每年降雪长达3~5个月,道路积雪给居民生活带来极大不便.国外多雪国家已有针对道路积雪清理设备开发与研究的公司,例如德国的SCHMIDT、丹麦的Epoke、美国的Henderson、瑞士的BOSCHUNG等,这些公司研发的除雪设备主要以雪铲式、犁式、旋切式或吹雪式除雪机为主[1].我国除雪设备的研发起步较晚,在借鉴国外先进除雪设备的基础上,结合我国自然状况,研发出了一系列大型除雪设备,如吉林省北欧重型机械股份有限公司生产的CZ-2420-2E型除冰雪机、哈尔滨雪狼除雪机械设备有限公司开发的雪狼1号除雪机等[2].上述除雪设备清雪效率高、作业面积大,但通常以卡车或者工程车辆作为主机,设备庞大、操控不灵活.城市居民小区和校园道路狭窄、障碍物多,无法使用大型除雪设备进行清雪作业[3-4].现有的小型化道路清雪装置多以人工手推式作业为主,在寒冷的室外,工作环境恶劣;清雪装置功能集中在清雪,未考虑积雪转运需求,松散的雪堆需占据大量的地面空间,不便于存放及转运.本文基于小区、校园等狭小环境道路积雪清理及转运需求,在研究雪的物理性质的基础上[5-7],采用模块化设计理念,设计了一款集清雪、送雪、压雪、码雪功能于一体的小型化道路积雪清扫压实装置,实现了除雪机械的智能化,并兼顾了积雪的转运需求,该装置可为冬季路面积雪的高效转运和就地处理提供新的解决途径.
1 装置功能及性能要求
针对小型化道路积雪清扫压块装置的应用场合、市场需求、清除装置类型和处理方式等,确定装置的设计要求[8-10]:
1)使用场合.适用于中、小型道路,即宽度较窄且大型除雪工程机械不能工作的道路,如校园、居民区、医院和公园内道路等.
2)道路清雪装置类型.类似抛雪式除雪机,该装置使用清雪滚刷清理道路积雪,需配装有抛雪泵、清雪铲和螺旋扇叶,能够将路面浮雪集中处理.
3)积雪处理方法.将路面松散的浮雪收集后压实成具有一定密实度的雪砖,并成堆整齐码放,以便后期转运和清理.
4)整机要求.装置具有多功能、低成本、高效率、小型化和低功率等特点.
小型化道路积雪清扫压块装置性能指标要求见表1.

表1 小型化道路积雪清扫压块装置性能指标
2 机械系统设计方案
本文设计的小型化道路积雪清扫压块装置集道路清雪、积雪压实、码垛功能于一体,主要由行走功能单元、清雪功能单元、积雪压实功能单元、雪砖码放单元组成,见图1.

图1 小型化道路积雪清扫压块装置组成
行走功能单元是装置实现运动的基础,主要由履带轮、机体和控制部分组成.行走电机输出轴与底盘驱动轮固定连接,通过输出转矩驱动履带底盘行走.采用履带底盘的优势是承载能力强、牵引力大、运行平稳、灵活性高.
清雪功能单元是装置的重要组成部分,主要实现集雪和抛雪两大功能.装置机械结构为市场上常见的绞笼式清雪机样式,通过悬挂支耳与整机底盘连接,利用皮带驱动抛雪叶片工作,实现集雪和抛雪操作[11-12].
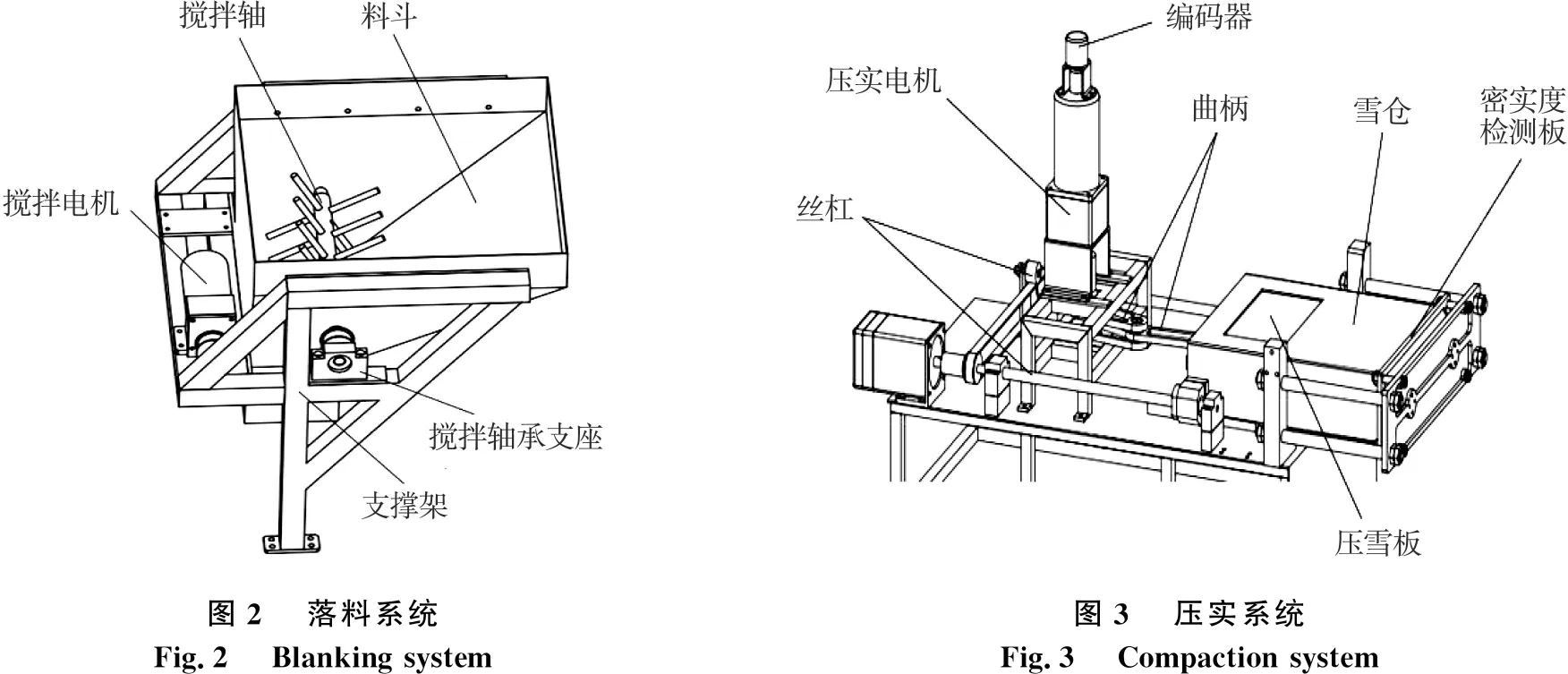
积雪压实功能单元是小型智能化清雪压块机器人的关键组成部分,能够实现将松散的雪压缩成具有一定密实度的雪砖.装置分为落料系统(上部)和压实系统(下部)两大部分,分别见图2、图3.
雪砖码放单元实现将压制完成的雪砖堆叠存放于雪砖托板之上,在丝杠与升降丝杠电机带动下将雪砖放置于指定区域,以便于后期集中转运,见图4.
小型化道路积雪清扫压块装置通过前端的清雪铲收集雪,螺旋扇叶在电机带动下将雪送至料斗,在料斗中将雪二次打碎,均匀地进入积雪压实单元的雪仓中,便于雪砖压实.同时,由曲柄带动的压雪板在电机带动下对松散的雪进行反复压实,直至达到密实度检测板设定的密实度.曲柄会保持在最大长度位置,雪仓在左、右滑移丝杠带动下向前端运动一个预定距离,使压实完成的雪砖落在码放单元的升降托盘上,随后在升降丝杠的带动下向下运动一个单位,以便压实下一个雪砖,直至可码放雪砖达到最大数量,最后将雪砖整齐叠放于指定区域.整个工作过程都由控制系统协调各部分完成,工作流程见图5.

3 机械系统三维结构
3.1 积雪压实功能单元
积雪压实单元主要分为两部分:落料装置和压实雪砖装置,见图6.落料装置主要由料斗、搅拌轴、支撑架及搅拌电机组成;压实雪砖装置主要包括曲柄滑块机构、压雪板、脱模电机、雪仓、丝杆和密实度检测板.积雪压实功能单元安装在一个支撑框架平台上,与行走功能单元相连.

图6 积雪压实功能单元三维结构
雪砖压实的过程实际上是一组连贯的往复运动.曲柄摇杆机构工作稳定、制造方便、工作空间较小、结构紧凑.曲柄摇杆压制执行机构结构见图7.两块曲柄由曲柄轴连接,摇杆的末端设有与压雪板连接的结构.曲柄1与压实电机相连,通过电机带动曲柄转动,曲柄再带动摇杆,将动力传递给压雪板,使其在雪槽内做往复运动.

图7 曲柄摇杆压制执行机构结构
压雪板设计成抽屉形,使压雪板在雪槽内运动更加稳定,上方的挡板还能防止雪下漏在挡板后方.当压雪板处于初始位置时,雪由料斗落入雪槽中;当压雪板推雪动作完成后,压雪板上方的挡板会将雪槽上的进雪口堵住,防止雪下漏,使雪始终落于压雪板前方,挤压成雪砖.雪仓及压雪板工作状态见图8.

图8 雪仓及压雪板工作状态
密实度检测板后方设有压力传感器,固定在堵雪板上,能够实时检测压力,当压力达到预定值后,该装置能够将信号反馈给挤雪电机.密实度检测板安装位置见图9.

图9 密实度检测板安装位置
在雪仓底部设有一对滑轨,将雪仓重量转移到滑块上,避免雪仓与支撑平台直接摩擦,使雪砖更容易脱模.
3.2 雪砖码放单元
雪砖码放单元主要实现将压实完成的雪砖放置在雪砖托板上,再通过丝杠的传动将其放置于地面上,实现雪砖码放.雪砖码放单元主要包括雪砖托盘、升降丝杠和控制电机、升降光杠、升降丝杠同步带,见图10.
升降同步皮带的主要作用是将动力分配给左、右两边的丝杠,使其同步工作,包括带轮、皮带、张紧轮支座等,可以通过调节张紧轮支座控制皮带的张紧程度,使其两端的丝杠处于同步工作状态,避免由于皮带与带轮型号不匹配导致的问题.升降丝杠同步带传动见图11.

4 压实机构力学分析
4.1 密实度最小成砖压力
压强与施加力F的关系:
F=p×S,
式中:p为抗压强度;S为雪砖压缩面面积.
压缩机构本质是曲柄滑块机构,电机给曲柄提供转矩和转速,带动滑块运动,实现压缩.为了测量获得额定压缩力时需要的电机转矩,可预先设定滑块获得的压力,从而得出电机转矩.
将压缩机构简化成如图12 a的曲柄滑块机构,其中,AB为曲柄,BC为连杆,设定变量θ、α、β(0≤θ≤π).力学分析如图12 b,FB对A点的力矩与电机转矩相等,FCx是FC的水平方向分力.

图12 雪砖压实机构受力分析
基于力学平衡关系及几何位置关系可知:
Me=AB×sinα×FB,
整理后可得
α=π-θ+β.
其中:Me为动力源提供的驱动力矩,N·m.

(1)
(2)
式(1)是Me关于唯一变量θ的关系式,式(2)是式(1)的逆关系.利用MATLAB软件,对式(2)进行运算绘图,可以得到图13.由于θ趋于0或π时,Me趋于无穷大,因此,舍去两端,便于图像观察.

图13 雪砖压制力MATLAB数据曲线
当曲柄滑块机构施加在雪砖上的正压力满足FCx≥36 kN(由雪砖抗压强度与雪砖压缩面面积乘积所得)时,可实现松散雪的压实成型.由图13可知:当曲柄AB与机架的夹角θ≥2.818 rad时,可获得最低密实度的雪砖.曲柄继续转动,雪砖密实度将进一步提高.通过堵雪板上安装的压力传感器,可实现指定密实度雪砖的压制.
4.2 基于Adams的雪砖压制机构运动学仿真分析
利用Adams软件,根据雪砖压制机构的基本原理构建刚体模型,见图14,约束关系见表2.

图14Adams简化模型Fig.14Adams simplified model表2 约束关系Tab.2 Constraint relationships约束名称构件1构件2约束副放置位置Joint1曲柄机架旋转接触点Joint2曲柄连杆旋转接触点Joint3连杆冲头旋转接触点Joint4滑槽机架锁定接触点Joint5冲头滑槽移动接触点
驱动加载.在曲柄轴线的旋转副上加载旋转驱动,根据工作要求设定转速为30 r/min.冲头参数(位移、速度、加速度)曲线见图15.

图15 冲头运动参数
结合冲头行程轨迹,得出有效冲压过程,见图16.由图16可见:运动的起始点位置并不是冲程的起点.针对图像进行组合分析,见图17,其中,绿色框线标注范围为冲头工作的半周期.由图17可得冲程加速度为147.6 mm/s2,结合软件测算可知,冲头在工作过程中的冲压力为42.7~53.2 kN,达到了雪砖压制力FCx≥36 kN的要求,可以保证雪砖压制成型.

5 小结与讨论
本文基于小区、校园等狭小环境道路积雪清理及转运需求,在分析雪物理性质的基础上,采用模块化设计理念,研制了一款集清雪、送雪、压雪、码雪功能于一体的小型化道路积雪清扫压实装置.该装置可自动实现雪的清理和压块码垛整理,可为冬季路面积雪的高效转运和就地处理提供新的解决途径.本文详细论述了小型化道路积雪清扫压块装置的设计方案,并针对积雪压实、雪砖码放单元等进行了详细设计.在此基础上,运用多体动力学分析软件仿真分析了雪砖压制机构的工作可行性,验证了装置工作和结构设计的可行性.本文设计的装置可为小区、校园等狭小环境积雪的高效转运和就地处理提供新的解决途径.由于受试验条件限制,仅对装置进行了理论研究、仿真分析及优化设计,并在此基础上完成了物理样机的研制,但暂未开展除雪效率、压实及码垛性能测试,还有待于在真实除雪状态下进一步开展试验验证.
