油气管道泄漏检测技术综述
2022-08-15高宏宇路敬祎杨丹迪侯轶轩
袁 满, 高宏宇, 路敬祎, 杨丹迪, 侯轶轩
(东北石油大学 a. 电气信息工程学院, b. 人工智能能源研究院, 黑龙江 大庆 163318)
0 引 言
管道运输因具有较好的稳定性、 经济性和高效性, 已经成为目前世界上主要的油气输送方式[1]。在国内, 截止2017年底, 油气长输管线总长度已经达到约131 400 km, 预计到2025年底将新增100 000 km的油气运输管道[2]。
随着管道运输规模越来越大, 管道泄漏问题也随之增加。造成管道泄漏的因素有很多, 如: 管道主体的自然老化和作业过程中的磨损、 地理气候环境变化导致的损坏以及人为打孔盗油等。由于管道运输的物质具有较高的风险性, 若管道发生泄漏, 不仅会造成巨大的经济影响, 还将给广大群众带来巨大的危害, 同时泄漏物质会迅速地扩散, 造成严重的污染甚至发生更危险的爆炸事故[3]。因此管道泄漏检测技术对社会、 群众安全都非常重要。
管道泄漏检测和定位是指利用各种技术原理和工具对运输管道进行工况检测, 在运输管道发生泄漏时能准确、 快速地识别出管道的泄漏状态并定位出泄漏点的具体位置, 使人们能快速对泄漏事故做出反应, 从而避免造成危害和损失。但由于油气管道大多深埋于地下, 周围环境复杂, 因此在进行管道泄漏检测时无法直接对地下管道进行检测, 并且在采集数据信号过程中存在较大的噪声干扰。这就可能造成在对管道泄漏检测时出现误报、 漏报, 因此如何在复杂的环境和工况下准确识别和定位泄漏事故一直是该领域研究的难点和关键所在。
早在上世纪70年代, 国外就已经对管道泄漏问题进行了针对性的研究和分析。1977年, Siebert等[4]提出了一种运用互相关分析原理对传感器信号进行分析, 从而进行管道泄漏检测。1987年, Billmann等[5]对微小泄漏难于发现和定位的问题提出了一种基于管道进出口压力和流量的非线性自适应状态观测器的检测方法。1988年, Benkherouf等[6]提出了一种扩展卡尔曼滤波的管道内气体流动的非线性分布参数泄漏检测预定位系统。1998年, Liou[7]证明了管道发生泄漏时管内脉冲响应会发生变化, 并提出了一种利用带通滤波器之间的互相关提取管道内的脉冲响应幅度, 从而进行管道泄漏检测。2001年, Mpesha等[8]提出一种频域响应法, 其利用传递矩阵法将管道内系统模型转为频域进行管道泄漏分析和定位。2009年, Ferrante等[9]利用拉格朗日模型耦合的方法对传感器信号进行处理, 并将信号的奇异性与管道系统相结合进行管道泄漏检测, Mashford等[10]提出了基于一组压力传感器的数据挖掘方法, 并使用支持向量机作为模式识别器对管道压力数据进行处理, 对管道泄漏的位置和大小做出了有效的预测。2016年, Zadkarami等[11]利用Schlumberger OLGA软件对管道进出口的压力和流量进行数据模拟采集, 提出了一种将统计技术与小波变换融合的特征提取方法并与多层感知器神经网络结合, 组成一种管道故障检测和隔离系统, 预测准确率达到了92%。2017年, Rahmati等[12]提出了利用物联网技术收集管道检测所需的数据, 并使用人工神经网络对收集到的数据处理进行管道检测。2020年, Bohorquez等[13]将流体瞬态分析与人工神经网络结合用于管道泄漏识别, 在泄漏检测与定位方面都取得了较高精度。
我国的管道泄漏检测技术源于上世纪80年代, 并且发展速度惊人。1988年, 方崇智等[14]提出了一种基于互相关技术的递推算法, 实现了管道泄漏在线预测和定位。1989年, 郭祖培等[15]提出了一种利用超声波探头对管道内声波信号捕捉然后对信号进行处理的管线泄漏检测方法。1994年, 靳世久等[16]提出了一种通过采集管道内的应力波谱与利用自适应抵消器去噪相结合的方法, 在噪声干扰较大的地下管道泄漏检测中取得较好的效果。1997年, 唐家秀等[17]首次在国内提出了先采集管道内的应力波信号并进行特征提取, 然后将特征指标输入搭建的人工神经网络, 进而实现管道泄漏检测。1998年, 靳世久等[18]提出了一种基于分段积分算法的负压波结构的模式识别模型, 并将此用于管道泄漏识别。1999年, 张仁忠等[19]提出将管道内部视为一个整体的开放系统, 利用经典的压力点分析法与仿真数据和实时数据相关分析相结合的方法完成管道泄漏检测。2003年, 胡志新等[20]将Sagnac光纤干涉仪原理与分布式光纤传感技术相结合, 用于管道运输状况的判断; 焦敬品等[21]给出了声发射技术管道泄漏检测技术。2004年, 陈希平等[22]提出了一种基于Matlab平台和小波变换的方法对传感器信号进行奇异性检测, 并用系数相似法对小波基和尺度进行选择, 然后将其结合运用于管道泄漏检测中。2005年, 陈华立等[23]提出了一种将管道内的压力数值转化为图像灰度值并通过计算检测管道内的负压波, 从而进行管道泄漏检测。2009年, 杨进等[24]提出了一种利用相关分析和近似熵相结合的方法对管道内的声信号进行特征提取, 并将其输入Elman神经网络中进行管道泄漏检测。2012年, 赵会军等[25]提出一种利用次声波原理与神经网络相结合的方法进行管道泄漏检测。2018年, 肖启阳等[26]针对微小泄漏检测问题提出了一种利用EWT(Empirical Wavelet Transform)对管道内采集的信号进行分解后, 再使用模糊相关分类器进行管道泄漏判断。2020年, 王贵愚等[27]提出将微震信号自动监测的短/长时窗平均法与负压波检测法相结合, 用于管道泄漏检测。
随着信息传输技术和电子计算机技术的进步, 管道泄漏检测技术也逐渐开始进行信息化和自动化改革。近年来, 越来越多的研究学者开始关注管道泄漏检测准确度和定位的问题。将传统泄漏检测方法与人工智能、 物联网等新兴技术相结合用于管道泄漏检测, 已经成为近几年研究的热点。适时地对这些研究成果进行总结与分析, 能积极推动管道泄漏检测技术应用与发展。笔者将回顾和阐述现有管道泄漏检测技术常见的方法以及分类, 并对管道泄漏检测技术今后的研究方向做出展望。笔者将泄漏检测方法大致分为人工巡检法、 硬件检测法和软件检测法3种, 其具体分类如图1所示。

图1 检测方法分类图
1 人工巡检
人工巡检是最为直接和原始的方法, 也是早期进行管道泄漏检测的重要方法之一。人工巡检是指通过定期调派有经验的管道工人, 通过手持检测设备沿运输管道进行人工检查, 进而判断管道是否存在泄漏的情况。工人常见的手持检测设备为便携式高精度的手持气体检测仪、 温度检测仪和内窥镜等仪器, 利用这些仪器对管道周围或管道内进行泄漏检测。并且在巡检的同时可以检测到管道周围的异常环境变化, 能及时发现人工盗油的情况。但在面对较长的管道时, 很难实现管道整体的实时检测, 导致不能及时发现管道泄漏事故而造成较大的损失, 并且只能对地面的管道进行检测, 对埋在地下或人难以到达的运输管道无法进行有效的泄漏检测。
2 硬件检测方法
如今, 有许多根据各种物理原理和使用背景设计的传感器设备, 如各种光、 嗅觉、 红外以及声波传感器等。而硬件检测指将传感器设备按特定的方式沿管道线装置, 通过监控各种传感器设备完成管道泄漏检测和对泄漏点的具体位置进行定位[28]。
2.1 红外传感器检测法
当管道发生泄漏时, 管道内物质外流会造成周围的温度发生变化, 而红外传感器可以精准的测量出周围环境的温度变化, 因此通过其监测管道周围的温度就可判断管道是否发生了泄漏[29]。目前常用的红外检测手段为: 在无人机、 直升机上装置精准、 先进的红外成像仪器, 在管道上空飞行, 同时记录和分析收集到的管道周围红外图像, 进而判断是否发生管道泄漏并进行泄漏定位。
该技术有准确度高、 范围广、 即时性强和对管道和工人无伤等优点。但需要管道与周围环境存在一定温差, 强日光会对检测效果造成影响。并且这种检测技术不具备连续性, 无法实现实时监测, 及时发现泄漏事故, 也无法对埋在地下的管道进行检测。
2.2 嗅觉传感器检测法
嗅觉传感器依据其自身电导率的改变进行管道泄漏检测, 在发生泄露时其内部的金属氧化物部件会和管道中的化学成分发生气敏反应, 进而改变自身的电导率, 并产生输出信号输送给监测台由此确定管道中的各种物质比例, 通过计算机和先进的信号处理算法处理输出信号, 大大提高检测的准确性[30]。其具体操作为将嗅觉传感器沿管道按特定的间隔布置, 并与中控台相连接组成系统对泄漏情况进行监控。此种方法具有实时性、 连续性和准确性高等优点, 但由于成本较高, 所以现在仍然没有被应用到工业生产中。
2.3 分布式光纤检测法
分布式光纤管道泄漏检测是指在管道及其沿线并排布置光纤, 将传感器沿着光纤布置并通过光纤传递传感器信号。随着光纤技术的进步, 多个或多种传感器可分布于同一根光纤上, 并将光纤信号与传感器信号的传输集成为一体, 将传感器的信号通过光纤传递回中控室进行管道泄漏检测[31-32]。其原理如图2所示[33]。

图2 分布式光纤检测法原理图
分布式光纤法一般需要与其他检测方法结合使用, 如安阳等[34]提出一种将相位敏感光时域反射计应用于管道检测中, 通过分析光信号的瑞利散射曲线的变化, 对管道泄漏做出警报, 最终定位误差在10 m内。韩玲娟等[35]提出一种基于Mach-Zehnder和Sagnac混合干涉仪原理和小波变换的管道泄漏检测方法, 并在长23 km的大港-枣庄输油管道进行现场实验, 最终实现了准确检测, 最大相对定位误差1.47%, 定位准确率较高。Ren等[36]提出一种将光频域反射法(OFDR: Optical Frequency Domain Reflectometer)应用于分布式光纤检测法中, 同时监测管道的腐蚀和泄漏情况。
分布式光纤检测方法在对管道泄漏情况进行检测的同时也能感应到沿线周围的环境变化, 并对可能对管道产生破坏的事件进行警报。由于铺设光纤时需要埋在一定的深度才能保证作业安全, 因此成本较高, 且在作业现场铺设的光缆剩余光纤数量通常不能满足分布式光纤法的要求。但随着铺设光纤的成本不断降低, 分布式光纤检测方法极具应用潜力。因此随着科技的进步发展, 分布式光纤技术不断完善, 其在管道运输泄漏检测方面的应用会更加完备。
2.4 声波传感器检测法
早在1989年, 方崇智等[14]提出了通过采集管道内的声波信号进行管道泄漏检测。其原理为在管道发生泄漏时管道泄漏点处的泄漏物与管道相互作用并产生声波, 然后利用声波传感器对声波进行捕捉, 并且利用管内上端和下端声波传感器接收声波的时间差准确定位泄漏位置[37]。声波检测法的基本系统结构如图3所示[38]。

图3 声波泄漏检测与定位结构图
图3中L为两端声波传感器之间的距离;O为泄漏点; A为上端传感器; B为下端传感器。若声波在该管道液体或气体中的传播速度为v, 在发生泄漏时, 泄漏产生的声波到达A、B传感器的时间为t1和t2, Δt为声波到达A、B两传感器的时间差, 则泄漏点O的位置可以由
O=(L+vΔt)/2
(1)
计算。只需知道传感器A、B之间的距离L, 波速v以及声波到达A、B传感器的时间差Δt, 即可以定位O点。因此, 声波检测方法的关键有两点: 1)如何从具有噪声干扰的环境中准确的检测和识别出因泄漏而产生的声波信号, 从而避免误报; 2) 如何精确地检测声波在管道内有介质的情况下的具体传播速度。刘翠伟等[39]在一段长251.5 m, 内径10 mm的管道进行模拟泄漏实验时, 采用声波法进行定位, 相对定位误差达到0.069%, 实现了精准泄漏定位。武伟强等[40]提出了一种对收集的次声波信号尖端补偿后再进行小波变换的特殊信号处理方法, 并在长2.5 km, 直径65 mm的管道上进行实验, 取得了较好的泄漏检测和泄漏定位的效果。谢含宇等[41]对次声波信号采用了平均经验模态分解算法和相关性分析的综合处理, 运用二次相关时延估计算法进行定位计算, 得到较高的检测和定位的准确度。
该方法只需在管道内布置足够的声波传感器, 并不需要对管道进行数学建模, 比较适合我国管道长且复杂的特点。声波检测法也是应用最为广泛的检测方法之一, 对其研究也是该领域的热点方向。该方法具有实用性较强、 实时性较好以及定位准确性较高的特点。但如果需要检测较长距离的管道时, 由于声波传播的范围并不长, 需要布置多个传感器, 因此需要花费大量的经费和人力布置检测器导致成本大幅提高。
2.5 负压波检测法
由于管道内运输的物质在流动过程中具有连续性, 因此在发生泄漏时, 管道内物质流动的速度并不会立即发生明显变化, 但泄漏点的压力会急剧下降, 并与相邻的区域形成一定的压力差, 致使相邻区域的物质向泄漏点流动填充, 从而导致管道内整体压力缓慢下降, 这种压力降低的现象被称为负压波。负压波以泄漏位置为起始点并与管道内壁和管道内的物质相互作用, 最终成为两个分别以声速向管道上下游传播的平面波。若要实现该检测方法, 只需将负压波检测器安置在管道的两端, 通过计算机端的软件对其监测的数据进行采集和处理分析, 从而判断是否发生泄漏。负压波检测法原理如图4所示。
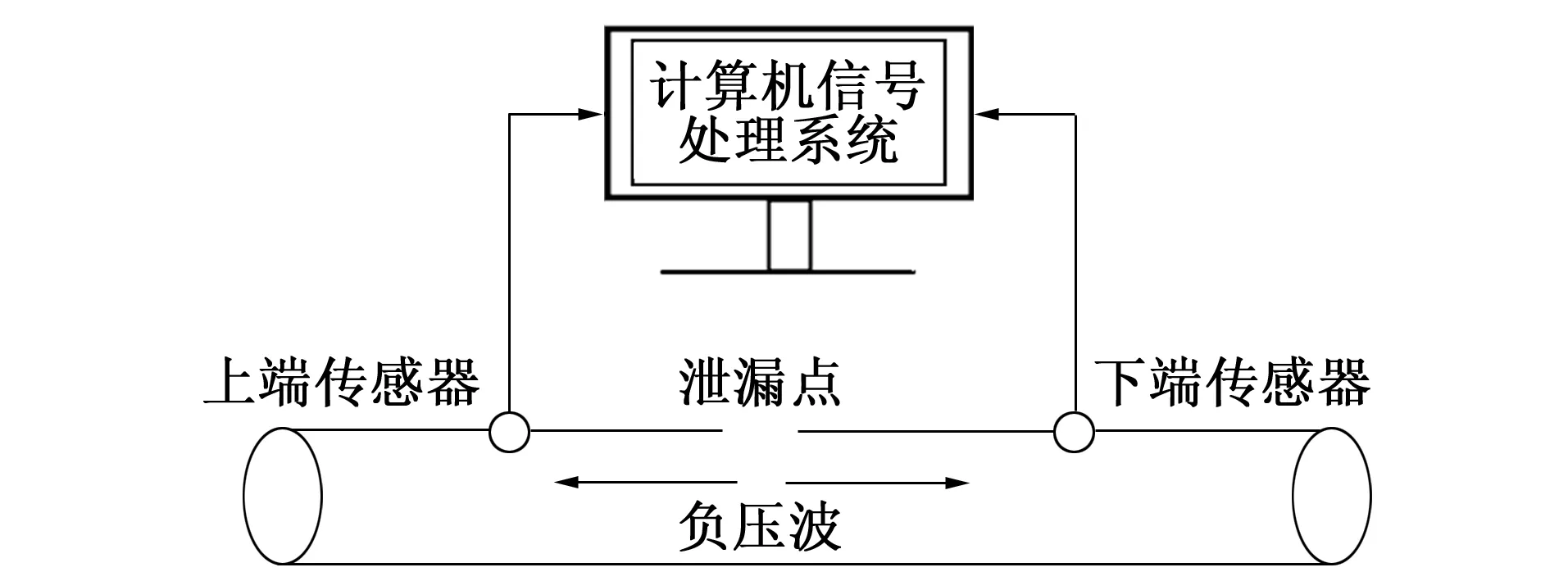
图4 负压波检测法原理图
负压波在发散时具有较强的抗衰减能力, 因此它能传播到较远的位置, 所以适合长距离输油管道的管道泄漏检测[42]。通过两端检测器接收信号的时间差可以实现泄漏定位, 具体原理与上述的声波定位较为类似。影响负压波泄漏检测准确率的关键因素是安装的检测装置的敏感程度, 以及能否区分其他情况下产生的负压波(正常操作和环境干扰)与真实管道泄漏而产生的负压波。因此识别泄漏所产生的负压波是该方法的关键, 所以其研究重点在于负压波传播的模型和波形的构建, 以此更准确的识别因泄漏引起的负压波和帮助提高定位精度, 提高泄漏检测的效果[43]。张宇等[44]基于负压波原理提出了一种动态压力变送器, 将其应用于全长为94.21 km, 直径为457 mm的兰-成-渝输油管道进行实验, 实现了准确区分管道正常作业、 发生泄漏、 调泵调阀等不同状态下的信号。
负压波检测方法具有易于安装, 定位准确, 适用性强, 反应迅速和检测范围广等优点。但在对管道进行人工操作时, 偶尔会有错误报警发生, 且存在对微小泄漏敏感度不高的问题。仍需进一步改进检测的方法, 将人工神经网络或其他方法与本检测方法联合使用, 可使检测效果准确可靠, 并且随着理论研究的进步和计算机计算能力的增加也使负压波检测方法更加成熟、 准确。例如唐伟浩[45]将低频电磁波技术与负压波相结合的方法应用于管道泄漏中, 实现了精确的泄漏检测和定位。李凤等[46]提出一种负压波与声波耦合的检测技术, 有效提高了泄漏检测和定位的准确度。
2.6 智能管道机器人检测法
由于大多管道所处的是人们不能直接接触的环境, 因此在运输管道发生泄漏问题时, 人们往往不易直接发现管道泄漏现象和对管道进行直接修理。为此, 人们研究出一种能在管道内部运动并且能完成相关作业的设备, 即智能管道机器人[47]。其能在作业人员的控制下完成一系列的管道检修作业。它是针对油气管道检测和维护的特殊的机器人, 拥有多种先进技术的综合体。它实现了管道作业的自动化。其集成的多种传感器使其能应对管道内的复杂环境并即时发现管道泄漏的情况, 并利用其自身的功能模块对泄漏位置进行维修处理。
管道机器人根据驱动方式和机动部件结构可大体分为5大类: 仿生式、 履带式、 螺旋驱动式、 车型式和支撑轮式[48]。张建伟等[49]基于ATmega128单片机设计了一种可变径管道机器人, 采用RS485和AC220通信模块, 配合360°旋转摄像头将管内工况传给上位机, 并且研究了一种新的可变径结构, 使其能在不同直径的管道内工作, 增强实用性。在作业过程中, 管道机器人的移动速度和平稳性以及越障能力等运动性能都与作业的效果和效率直接相关, 但管道机器人的运动系统控制和定位操作问题一直是管道机器人领域的一个难题[50]。单彦霞等[51]设计了一种基于3-UPU并联机构的双重驱动机器人, 并联机构使其在过弯时的平稳性大大提升, 并采用四叶螺旋驱动的方式, 提升了机器人的运动速度。随着科学技术的进步和人们对管道机器人越来越重视, 管道机器人技术将会更加成熟和完善, 未来对管道机器人研究的重点如下。
1) 研发出可靠、 灵活和集成多种功能的机身结构。未来的管道机器人应具有牢固可靠的机身结构和灵活的越障能力。并且实现多种功能模块的融合, 例如切割、 焊接和检测等功能。
2) 可靠和自治的控制系统。在长距离的运输管道中要保证控制系统的实时性和稳定性是非常困难的。但稳定的控制系统是管道机器人完成作业的基础, 所以未来如何实现稳定实时的控制系统将是管道机器人研究的重中之重。采用深度学习及其他人工智能先进技术理论解决机器人自身的控制问题, 提升处理管道问题的能力, 实现管道机器人的自主作业。
3) 稳定持续的动力能源。常规的有线电缆驱动方式不能满足长距离和复杂管道环境的需求。而当前的电池技术也难以支持管道机器人进行长时间的作业。所以如何解决动力能源问题也是未来需要解决的难点。
早期的管道机器人由于技术的限制只能在直线管道中作业, 且受制于动力能源供应方式, 有效作业距离仅有几百米, 无法对复杂的长输管道进行有效的作业。而如今管道机器人技术逐渐趋于成熟, 其能在更复杂的环境中工作, 且工作距离大大增加, 并采用模块化设计实现了多种功能。随着管道运输的应用逐渐增加, 针对特殊管道环境开发的管道机器人也将成为该领域研究的热点。相信随着人工智能技术和无线技术的进步, 智能管道机器人的检测效率将会越来越高, 操作会更加轻松便利, 功能更加全面。使智能管道机器人在管道泄漏检测领域能被广泛的应用。
3 软件检测方法
基于软件的检测方法是指通过利用计算机平台的数据采集系统采集管道环境里的各种信号, 并进行信号处理和分析。通过计算机的强大的计算能力分析和判断管道是否发生泄漏以及泄漏定位。
3.1 支持向量机检测方法
支持向量机(SVM: Support Vector Machine)算法在构建之初是为二分类问题而提出的, 是一种基于最大间隔分隔数据的算法。它具有极强的泛化能力, 并且非常适合处理非线性数据, 是目前广泛应用的一种机器学习算法[52-53], 用于管道泄漏检测有较好的效果。该方法基本原理为首先通过信号收集系统对布置在管道周围的传感器进行实时数据收集, 并用小波包分解或HHT(Hilbert-Huang Transform)对接收数据进行降噪处理和特征提取[54-55], 并利用SVM算法通过对提取的特征向量进行识别, 以判断是否发生泄漏[56]。支持向量机管道泄漏识别流程如图5所示[57]。

图5 支持向量机检测法流程图
SVM算法核函数的选择以及各种参数的选择决定了系统的准确性。何健安等[57]选用高斯函数为SVM分类的核函数, 利用核函数性质和几何距离选择合适的σ(高斯径向基函数的宽度)进行管道泄漏检测并达到较高的准确率。刘浩宇等[58]将一种基于粒子群算法(PSO: Particle Swarm Optimization)和SVM相结合用于管道泄漏检测中, 其基本原理为利用PSO找出SVM模型中最优的参数, 并在一段周长2.8 km的环形管道上进行8 mm泄漏实验, 其准确率达到97.5%。但SVM管道泄漏识别法由于复杂的算法和不可连续监测的问题没有被广泛应用。
3.2 人工神经网络检测方法
人工神经网络(ANN: Artificial Neural Network)的概念由美国心理学家McCulloch和数学家Pitts[59]提出, 并从上世纪80年代至今一直是热点研究领域, 它在多个领域广泛的应用经验为其应用在管道泄漏检测奠定了坚实的基础[60-61]。
该方法需要将收集的管道数据进行特征提取后作为网络的输入, 经过网络的层层计算后, 最终的输出为泄漏预测结果。而人工神经网络是一种运算模型, 一般的神经网络由输入层、 隐含层以及输出层构成, 每层都由大量的节点(神经元)相互连接构成。并且每个节点代表一种激励函数, 而每个节点之间的连接为权重, 即人工神经网络的“记忆”[62]。而隐藏层的神经元数量的确定是搭建一个神经网络的关键, 它直接影响整个网络的效果, 如果神经元数量过多则会降低网络训练和计算的速度导致效率低下, 而神经元数量过少则会影响神经网络拟合效果从而导致训练的效果降低[63]。通过大量尝试是寻找合适的神经元数量常见的方法。人工神经网络结构如图6所示。
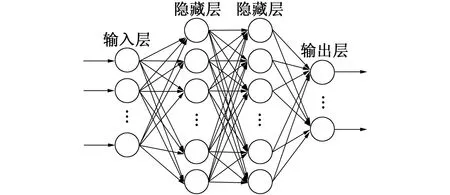
图6 人工神经网络结构图
BP(Back-Propagation)网络是经典的人工神经网络之一。其特点是在训练网络时通过误差的逆向传播调整权重, 且任何一个连续函数都可以由一个仅有3层的BP神经网络模型拟合, 这使BP神经网络有很强的包容性[64]。张忆等[65]将BP神经网络用于管道泄漏检测, 采用Trainglm算法对模型进行训练取得了一个较好的准确度。燕宗伟等[66]提出将遗传优化算法与BP神经网络相结合进行管道泄漏检测, 并在长为2.8 km, 直径为50 mm的环形管道进行模拟实验, 并将误差均值降到0.001 2。
但浅层神经网络也存在一些问题。首先, 虽然神经网络具有极高的非线性表示能力, 但也因此致使参数解中存在众多的局部极值, 并导致浅层神经网络将局部极值作为最优解输出。其次, 在处理较大规模的数据时需要增加网络的层数, 但神经网络层数过多会导致网络效率偏低, 这既因为早期硬件条件限制, 也由于复杂神经网络存在梯度消失的情况, 因此在大多数情况下只使用中间层为2层或3层的神经网络模型, 在面对大量数据时无法取得一个较好的效果。
3.3 流量/质量平衡法检测方法
流量/质量平衡法是基于质量守恒法提出的一种检测方法, 其原理为, 管道出现泄漏时, 在管道上端和下端所测得的物质流量/质量会有一定的差值。基本操作为, 将传感器安装在管道上下端并将传感器信号传输到中控台, 然后经过计算机处理后, 若发现上端和下端测得的流量/质量差值大于所设定的阈值时, 就会发出警报提醒发生泄漏[67-68]。由于其成本低和设备安装方便的特点, 流量/质量平衡检测法也被广泛利用。但在有几种情况下会导致降低检测的准确度造成误报和漏检的情况发生, 如: 管道运输时会经过多个进出支线导致流量和质量产生变化; 管道运输时其内部的压力、 温度以及密度等在不同的管道环境下会产生变化。为解决以上问题并提高检测的准确度, 蒋士章等[69]在传统流量/质量平衡法的基础上,提出了准度更高的动态流量/质量平衡法, 但其需要建立的模型和算法更加复杂, 所需数据量也增大。由于需要设定进口与出口流量和质量差的阈值, 该方法对微小泄漏并不敏感。因此流量/质量平衡法需要与其他管道泄漏检测方法融合使用才能发挥更好的效果。Martins等[70]将声学原理与流量/质量平衡法相结合, 声学检测系统对管道泄漏进行报警和定位, 并利用流量/质量平衡法对泄漏量化, 实现了声学与流量质量平衡法的互补, 取得了更好的检测效果。
3.4 深度学习检测法
基于浅层人工神经网络存在的问题, 人们提出了深度神经网络模型, 该模型先对网络参数进行非监督学习方式的训练, 然后再用监督学习方法调整神经网络参数的训练方式使浅层神经网络存在的问题得到了有效解决, 这种改进后的模型被统称为深度神经网络[71]。深度学习则是最近提出的一种深度神经网络的总称, 它具有更深层次的机器学习模型, 其利用算法对样本进行深层次的特征提取并进行多次变换。
近年来, 随着深度学习的快速进步和完善, 越来越多的工业生产领域开始利用深度学习提高产业的生产效率和安全性, 而输油管道泄漏检测领域也开始广泛应用深度学习方法提高检测的准确性,以避免造成重大的事故和损失。其中卷积神经网络、 循环神经网络和生成对抗网络是已经被广泛应用的深度学习模型, 并且每个网络都有自己的特点和优势。
1) 卷积神经网络(CNN: Convolutional Neural Networks)的特点在于每层的特征都是通过与上一层局部共享权值的卷积核和上层的特征值相计算而得出的, 这能最大限度地保存二维数据的空间结构。而池化操作能使网络在输入平移的情况下产生完全相同的输出, 即目标的外观发生某种变化但依旧可以被识别, 这在图像分类任务中非常重要, 并且卷积神经网络模型中的各个参数可以通过梯度下降法进行调整和训练[72-73]。但在处理更大的样本时, 若只简单的增加网络的层数不可避免的会出现一些问题, 如: 过拟合问题和训练速度降低。且随着卷积神经网络的结构不断更新, 其训练所需的数据集将比之前的数据集的数量更大、 类别更多, 人们需要消耗更多的时间和成本制作一个庞大的数据集。
2) 循环神经网络(RNN: Recurrent Neural Network)的研究源于上世纪80年代, 美国数学家Jordan提出了一种Jordan网络, 被认为是如今RNN的前身[74]。随着深度学习理论的不断完善, 人们在Jordan网络的基础上提出结构更加复杂、 学习能力更加强大的RNN模型。其最大的特点就是串联的网络结构使其在处理时间序列样本时更有优势, 并将单位神经元某一时刻的输出作为输入再次输入进网络中, 能很好保持样本的依赖关系, 从而使RNN具有“记忆性”[75]。但由于标准RNN模型在训练过程中会出现梯度消失的现象从而引起“短期记忆”的问题[76]。因此Hochreiter等[77]提出一种长短期记忆网络, 用于改进传统的RNN模型, 其在传统的RNN构架中将复杂门控机制加入隐藏单元, 实现了记忆的长久储存。
3) 2014年, Goodfellow等[78]构建了一种深度学习模型即生成对抗神经网络(GAN: Generative Adversarial Networks), 由于独特的对抗思想使其在一些领域中得到广泛应用, 例如图像处理、 音频处理和信息安全等领域。GAN网络的网络结构由生成模型G和判断模型D两部分构成, 生成模型G的主要功能是通过观察真实样本然后生成一个赝品样本并尽量使该样本与真实样本相似, 达到以假乱真的效果。而判别模型D的主要目的是判别输入样本是否为真实样本。D的输出为一个概率值, 表示D判断输入为真实样本的概率值。并通过反向传播对G进行参数调整, 使之生成的赝品样本与真实样本更加相似。若该网络最终达到D无法判别输入是否为真实数据时即G每次输出的概率值都为0.5时, 则训练结束模型达到最优[79-80]。
近几年管道检测领域也开始重视和使用深度学习模型, 其依赖强大的泛化能力和分类能力有效避免了在多种情况下的管道泄漏检测误报的情况。随着深度学习不断取得新的突破也为管道泄漏检测技术提供新的方向。
3.5 基于模型的泄漏检测法
模型法其原理是根据管道内流体的质量平衡、 动量平衡和能量守恒的原理对管道内流体构建一组状态方程, 并在计算机平台上建立一个实时模型模拟真实管道内运输状况[81]。其原理如图7所示[33]。

图7 模型法原理图
布置在管道两端的采集器定时对管道上下两端的流量、 质量等数据进行采集并传输给中控室与构建的实时模型所预测的值进行比较, 若差值大于设定的阈值则会触发泄漏警报。王丰瑞[82]针对气体运输管道的特点, 在传统模型检测法的基础上提出了一种根据管道内壁摩擦力、 阻力不均匀和管道大小变化修正后的模型公式, 有效提高了模型法泄漏检测和定位的精度。董东等[83]将自适应Kalman滤波应用于管道模型构建中进行管道状态预测, 并将试验管道分为若干段同时安装传感器对管道内压力数据进行采集, 与模型预估值比对进行泄漏和定位预测, 并将该方法在一条长150 m,内径10 mm的管道上实验, 得到定位误差为1%, 达到了较高的精度。郎宪明等[84]将扩展Kalman滤波与粒子滤波相结合应用于管道状态估计中, 将模型方程中的观测值与粒子滤波的参数相联系, 提升了粒子滤波算法的效果, 取得了较高的泄漏检测与定位的精度。
这种检测方法的精度取决于构建模型类型的选择和所布置采集系统的精度以及测点的数量[81]。实时模型法对泄漏的敏感性较好, 并且能对管道进行连续的实时监测和对泄漏进行定位, 但需要提前知道管道的模型和状态空间方程。
3.6 随机森林检测法
决策树算法是一种与树干结构非常相似的机器学习算法, 它是一种单个分类器, 通常被用于进行决策, 具有算法简单、 效率高的特点。但其在处理残缺数据时比较困难, 且容易出现过拟合的情况[85]。而随机森林算法能解决以上问题。随机森林算法是在决策树模型的基础上发展起来的, 由多个决策树集成为一整个随机森林模型, 在模型进行训练学习时引入随机参数选择, 且每个决策树的输出都会对随机森林最终的输出结果产生影响。随机森林进行管道泄漏检测具体流程为: 首先, 使用bootstrap取样方法对管道数据原始样本抽取n个样本进行特征提取, 每个样本规模与原始样本相同。然后, 根据n个样本建立n个决策树, 并将样本的特征分别输入进决策树模型中得到输出结果。最后根据所有的决策树输出结果共同决定最终的管道泄漏预测结果。随机森林流程如图8所示[85]。
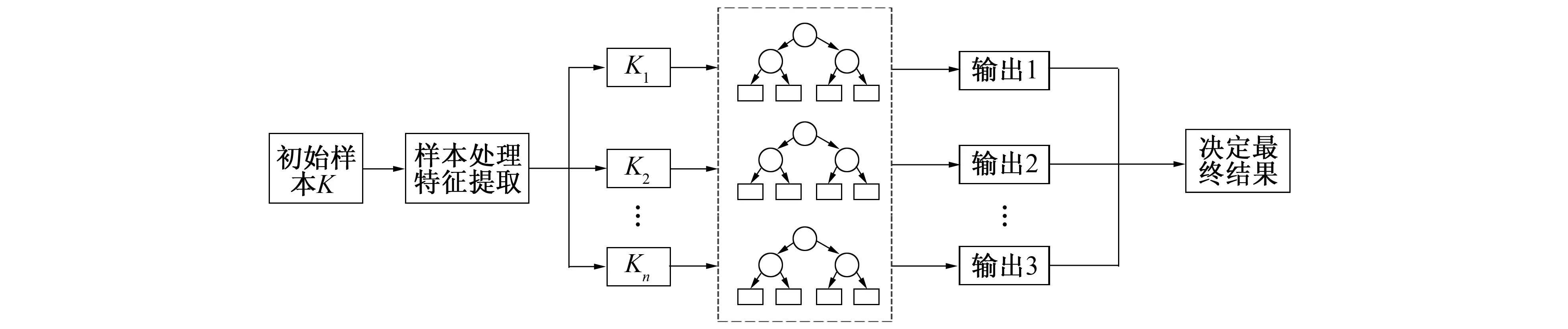
图8 随机森林原理图
虽然随机森林算法解决了单一决策树模型存在的问题, 但其存在处理连续序列时必须先将数据离散化, 以及不易处理非平衡数据的问题。郑建华等[86]针对不平衡数据的问题提出了一种对数据样本混合采样的方法, 将高斯混合模型和SMOTE(Synthetic Minority Oversampling Technique)-borderline1优化算法相结合对数据进行上采样, 然后再随机下采样的方式改善了随机森林对不平衡数据的处理能力。杨杰明等[87]提出了一种将改进后的代价敏感引入随机森林模型的ICSRF(Improved Cost-Sensitive Random Forest)算法, 赋予了各个子决策树分类结果不同的权重, 而它们的权重取决于自身的分类性能, 提高了随机森林分类的准确率。桂州等[88]将基于PCA(Principal Component Analysis)改进的SMOTE算法与随机森林相结合, 先对数据进行降噪, 再将缺失值补全, 改善了对不平衡数据集的分类能力。曹正凤[89]提出了一种CORCHI2的算法并用于决策森林中, 该算法简约了样本中的冗余信息, 提升了模型的执行效率, 随机森林对连续序列处理的能力得到了提高。随着随机森林算法不断的完善, 其在管道泄漏检测的应用也会更加广泛和高效。
4 结 语
随着管道运输应用越来越广泛, 对管道泄漏检测与定位的效果和精确度要求也越来越高。对泄漏比较严重的情况, 大多数方法都能检测, 但对微小泄漏情况, 还存在难以进行准确检测和定位的问题, 并且各种管道泄漏检测方法都有弊端。据此, 对未来该领域展望如下。
1) 推动数据处理方法的发展。由于管道长度的增加, 采集的工况数据也将随之增加, 但现场的泄漏工况数据非常稀少, 且在获取数据的过程中会受到噪声的影响, 因此在对数据进行预处理时难度将会提升。通过合适的数据处理技术对数据进行预处理, 并与合适的数据驱动模型结合对管道进行泄漏监测。
2) 将多种识别方法结合。由于长输油气管道所处环境复杂, 若仅使用某一种识别方法用于管道泄漏检测无法得到令人满意的效果。要想取得较好的管道泄漏检测效果则需要将多种识别技术相结合使用。
3) 推动混合型智能泄漏检测技术发展。近些年随着深度学习、 人工神经网络等一些智能技术的快速发展, 极大地推动和改善了管道泄漏检测技术。且各种深度学习模型、 粒子群算法、 智能管道机器人以及其他的智能检测方法能达到较为准确的检测效果, 但大多是在特定条件下才能完全发挥作用, 且存在一定弊端。而通过将多种人工智能的泄漏检测方法相融合的方式能消除存在的缺点, 准确的判断泄漏发生, 提高定位准确度。
虽然目前还没有一种适合所有工况下的管道泄漏检测方法, 但随着智能检测技术的发展, 传感器技术的进步, 计算机硬件的提升以及数学模型的不断突破都将促进多种检测方法的结合和应用, 使管道泄漏检测技术将会更加准确和智能。
