空间绳网捕获动力学仿真
2022-08-09胡伟鹏
周 挺, 胡伟鹏, 2, 翟 喆, 张 帆
(1. 西安理工大学土木建筑工程学院,西安 710048;2. 西安理工大学西部旱区生态水利国家重点实验室,西安 710048;3. 中国兵器科学研究院,北京 100089)
0 引言
随着空间技术与应用的发展,在轨补给、维修、营救和空间碎片处理已经成为航天领域非常重要的前沿问题,引领着空间系统体系结构转型和空间基础设施建设的发展方向。其中安全且自主的空间非合作目标捕获是解决上述问题的重要基础和关键技术瓶颈,也是体现当今航天技术发展水平的重要标志之一[1]。
目前卫星发射数量的增加和空间碎片的积累,导致碰撞或老化产生碎片的概率增加[2]。在近地轨道,碎片和轨道垃圾可以随着时间的推移逐步落入大气层被烧毁,而在较高的轨道上,碎片只会发生轨道自然漂移而扩散到附近轨道,因而太空垃圾的捕获成为了将来航天工作不可避免的重要任务[3]。相对于刚性捕获而言,柔性绳网捕获是以面对点的捕获方式,所以通过增加飞网面积来补偿捕获时的误差,这样就可以有效降低对系统姿态控制的高要求[4-5]。
翟广等[6]研究了空间绳网系统在圆轨道上的自由和非自由展开动力学行为,并对系统在局部垂直和局部水平坐标系下的运动进行了分析和仿真,最终证明了在满足初始临界条件的情况下,绳网系统部署完成后的动力学行为是临界稳定的。Benvenuto等[7]讨论了空间绳网系统在涉及柔性接触的捕获和拖拽阶段可能遇到的主要困难。Shan[8]和Botta[9]等通过绝对节点坐标法对空间绳网捕获展开的研究,其中Shan着重研究了4个关键参数,最大网面积、部署时间、移动距离和有效周期,仿真结果表明基于绝对节点坐标法建模方法的结果与基于质量-弹簧建模方法的结果吻合较好。Botta验证了绳网的弯曲刚度对绳网动力学特性和计算效率的影响,当考虑绳网弯曲刚度时,绳网更能抵抗在展开过程中由边角质量和在捕获过程中与碎片的接触引起的形状变化。Eleonora等[10]研究了绳栓驱动闭合机构的可行性,并开发了一种基于绳栓长度和捕获空间碎片时张力的绳栓缠绕控制策略。张景瑞等[11]研究了绳网发射子系统的结构设计,并建立了一种新的柔性绳网空间机器人系统用于捕获空间碎片。翟广等[12]应用拉格朗日方程,在轨道框架下建立了绳网系统的动力学模型,并证实前馈控制器能够有效地抑制平面内的振动,并使捕获网能够按照预期的轨迹运行。Sharf[13]研究了绳网系统中网的闭合机理,并通过实验验证了这一机制,绳网展开的实验在地面得以实现[14-15]。黄攀峰等[16]基于绝对节点坐标法,并通过比较接触参数的不同找出最优初始绳网发射条件,证实了本文采用的方形绳网与星形绳网在捕获过程中均有良好表现。空间碎片[17]的绳网捕获已经引起了学术界的广泛关注,但是,对于绳网的初始释放条件的研究相对较少。
为了得到更合理的绳网系统初始释放条件,以便绳网在接触目标后能成功包裹目标,本文开展绳网捕获仿真分析。在已有研究的基础上通过ABAQUS软件进行捕获过程的仿真,对不同形态的捕获目标实施捕捉,并对同一捕获目标采用不同姿态进行横向对比,从而分析得到使捕获过程更高效的关键因素。
1 绳网捕获系统动力学模型
绳网捕获系统的动力学研究由绳网系统动力学建模与绳网与捕获目标的碰撞动力学建模构成[18]。将绳段质量等效至相邻节点,每个节点的内力由弹簧和阻尼产生,考虑到绳子本身的属性,其无法承受压力,因此节点内力只在受拉时产生。节点所受外力源于空间扰动、轨道运动、地球重力与捕获阶段的接触力。具体动力学模型建立过程如下。
1.1 绳网动力学模型
首先利用有限元法将绳网划分为多个细小的离散单元,将每一个单元等效为弹簧阻尼模型,如图1所示。

图1 绳网单元模型[18]Fig.1 Rope mesh unit model
绳网单元ij两端点分别为节点i和节点j,张力Tij大小可以表示为:
(1)
式(1)中,lij表示绳段ij的当前长度,iij表示绳段ij的变化率,kij表示绳段ij的刚度系数,cij表示绳段ij的阻尼系数,可分别表示为:
(2)
(3)
lij=‖rj-ri‖
(4)
(5)

节点i的动力学方程为:
(6)
式(6)中,Ti为节点i的张力;Fi为节点i的接触力。
将Ti和Fi分解为各坐标轴分量后得到节点i的动力学方程为:
(7)
1.2绳网-目标碰撞动力学模型
绳网发射后与被捕获目标发生的碰撞可简化为弹簧模型,采用罚函数法,当绳网节点与被捕获目标节点发生穿透时,由弹簧弹力描述的法向接触力会被引入用以防止穿透。法向接触力可以表示为:
(8)
式(8)中,K为罚刚度;δ为法向穿透深度。
根据库伦摩擦定律,接触点切向方向的接触力可表示为:
Fτ=μFn
(9)
式(9)中,μ为绳网与被捕获目标间的摩擦系数。
进而绳网与被捕获目标发生碰撞时的接触力可表示为:
F=Fnn+Fττ
(10)
式(10)中,n为碰撞时接触面的法向单位矢量;τ为碰撞时接触面的切向单位矢量。
2 动力学仿真分析
利用ABAQUS有限元软件处理复杂的接触碰撞问题,通过采用相同绳网模型对不同形状、姿态的被捕获目标进行仿真,进而通过评价体系分析出不同目标形状、姿态在捕获过程中造成的影响。在进行仿真前假设:1)节点所受外力只包含绳网与被捕获目标碰撞过程中的接触力,忽略地球重力、轨道运动以及太空扰动产生的影响;2)绳网在与被捕获目标碰撞前已完全展开,初始状态下被捕获目标相对于绳网静止;3)绳网捕获装置只对捆绑在绳网四个角上的牵引球提供初速度;4)被捕获目标质量及其在绳网上的投影面积均相同。
2.1 绳网捕获评价指标
在捕获过程中,绳网应以最快的速度将目标包裹,使牵引球相对捕获目标不再产生剧烈碰撞,从而避免捕获过程中二次产生碎片,对捕获目标运动状态的影响应降为最低且绳网中产生的应力应尽量的减小。为实现上述目标特采用以下3个指标:
1)牵引球与捕获目标间距Dq:相同仿真时间下牵引球至捕获目标之间的距离,用以观察绳网系统包裹程度,距离越近包裹程度越好,理想状态为紧贴捕获目标,从而使绳网达到完全包裹的相对稳定状态。
2)网口闭合所需时间Tc:绳网捕获过程中由牵引球构成的网口面积第一次为零所需的时间。时间越短表明包裹该类型目标时效率越高。
3)绳网最大应力Fn:捕获过程中,绳网中出现的最大应力越小越好。
2.2 建立模型
如图2所示,采用方形绳网,绳网边长7m,其间方形网格尺寸为0.5m×0.5m,绳网截面为直径2mm的圆,在绳网四角分别捆绑一个牵引球,牵引球直径0.2m,质量为4kg。建立惯性参考系,绳网所在平面为XY平面,绳网中心为坐标原点。被捕获目标质心位于Z轴正方向上。被捕获目标为正方体、弧形薄壁体和球体,质量均为2 000kg。正方体边长为2m,弧形薄壁投影尺寸为3m×1.33m,壁厚0.3m,圆弧半径50m,球体半径1.13m。
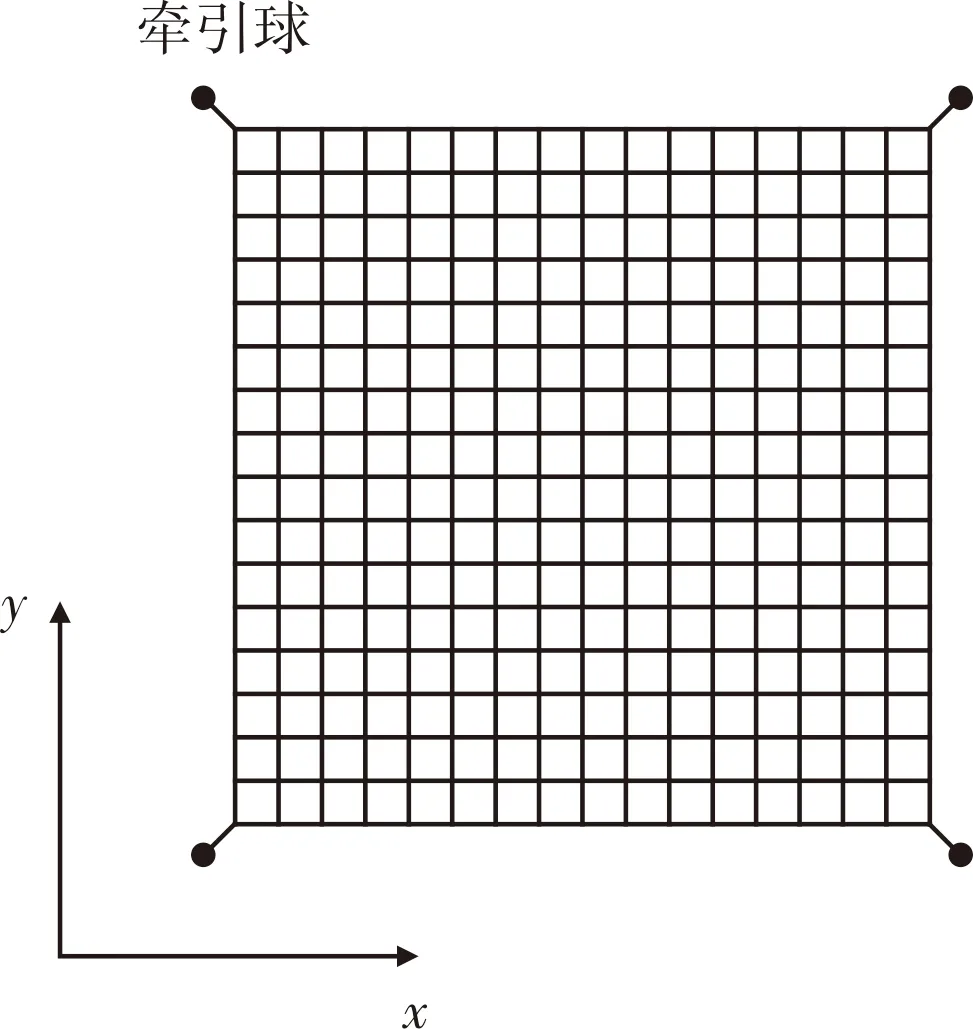
图2 绳网系统Fig.2 Tethered-net system
根据式(1)可知绳网系统中只存在拉力,无法承受压力,因而选取三维桁架单元对绳网进行建模以展现这一特性。如表1所列,仿真模型中,绳网划分为8 456个三维桁架T3D2单元、牵引球划分为638个C3D8R六面体单元和290个C3D6楔形单元、正方体目标划分为4 000个C3D8R六面体单元、弧形薄壁体目标由4 030个C3D8R六面体单元组成、球体目标由2 464个C3D8R六面体单元和1 120个C3D6楔形单元组成,且牵引球与捕获目标均设置为刚体。

表1 模型单元与数量Tab.1 Model units and quantities
相关材料参数如表2所列,绳网材料为Kevlar,其密度为1 440kg/m3,杨氏模量为70Gpa,泊松比为0.36,被捕获目标及牵引球的杨氏模量为210Gpa,泊松比为0.3。

表2 材料参数Tab.2 Material parameter
2.3 仿真分析


图3 正方体目标绳网捕获过程Fig.3 Cuboid target capture process

图4 弧形薄壁体目标绳网捕获过程Fig.4 Arcuate thin-wall target capture process

图5 球体目标绳网捕获过程Fig.5 Sphere target capture process
如图6所示,捕获目标为正方体时,网口闭合所需时间Tc为1.28s;捕获目标为弧形薄壁体时,网口闭合所需时间Tc为1.15s;捕获目标为球体时,网口闭合所需时间Tc为1.35s。且在相同的仿真时间下,根据绳网位形图与图7可以观察到的捕获目标为正方体时,在2s时绳网几乎已经将目标完全包裹,牵引球与目标距离Dq最近,而捕获目标为球体时,牵引球距离远远大于正方体的距离。仿真结果表明:当捕获目标质量与投影面积相同时,牵引球第一次网口闭合所需时间较为接近,其中弧形薄壁体所需时间最短,球体所需时间最长,3组对比整体相差不大。然而正方体在相同时间内的包裹效果远好于其他两组,这表明达到完全包裹且绳网系统与捕获目标达到相对静止状态时所需时间最短。

图6 网口首次闭合所需时间Fig.6 Required time for tethered-net first closure

图7 牵引球与捕获目标距离Fig.7 Distance between traction ball and target
考虑到绳网捕获实际操作中,无法保证每一次作业绳网系统与捕获目标都保持理想的捕获角度,因而在计算绳网最大应力Fn时,针对正方体与弧形薄壁体,将目标逐步旋转45°与90°,选取若干具有代表性的形态,如图8所示,取出同一目标下产生最大的绳网内的应力再进行对比。

图8 正方体与弧形薄壁体初始位形图Fig.8 Initial configuration of cuboid target and curved thin-walled target
整个绳网捕获过程中,绳网系统产生的最大应力如图9所示,正方体目标的最大应力为31.20Mpa,弧形薄壁体目标的最大应力为32.85Mpa,球体目标中绳网中的最大应力为22.58Mpa。针对同一捕获目标不同姿态下最大应力数值稍有区别,正方体与弧形薄壁体的最大应力均为捕获目标旋转45°后取得。

图9 绳网单元中最大应力Fig.9 Maximum stress in tethered-net units
同时,根据图10应力云图所示,网格中的深红色部分为最大应力单元,球体目标产生的最大应力位于绳网四角处,越靠近牵引球应力越大;在正方体与弧形薄壁体中最大应力发生在绳网与捕获目标棱角的接触处,此处产生的应力明显大于绳网四角牵引球处的应力,由此表明:在装备绳网时,应加强绳网与捕获目标棱角接触处和绳网边角处抗拉能力。尤其在捕获具有明显棱角的物体时,更应加强被捕获目标投影面积处的绳网抗拉强度。

图10 应力云图Fig.10 Stress nephogram
3 结论
采用有限元法,建立绳网系统弹簧质点模型,通过ABAQUS有限元软件进行动力学仿真,根据仿真得出的数据以及本文分析的结果可以得出以下结论:
1)采用7m×7m方形绳网捕获重量为2 000kg和投影面积为4m2的物体时,可以有效包裹目标。在相同绳网、捕获目标投影面积比与相同捕获目标质量的前提下,对表面积相对较大,棱角分明的正方体、弧形薄壁体具有良好的捕获效果,绳网闭合所需时间较短,但绳网中产生的最大应力同样有所提升,对表面相对光滑的球体捕获效果较差且达到稳定所需时间较长。
2)绳网中出现最大应力位置与被捕获目标形状有关,绳网系统与捕获目标棱角接触处易产生较大应力;与相对光滑目标接触时,绳网四周牵引球处易产生较大应力;其余位置的绳网单元内产生的应力明显低于前两处。因此,绳网需要加强抗拉强度的位置主要为投影面积区域的棱角处与边角处和牵引球相接的位置。
3)在捕获目标前应尽量调整捕获角度,使绳网与投影面保持平行,可有效减少绳网系统中产生的最大应力。
