基于人机工效学的农机座椅自动调平系统设计与试验
2022-08-05程尚坤马强龙陈黎卿
杨 洋 程尚坤 齐 健 张 刚 马强龙 陈黎卿
(1.安徽农业大学工学院,合肥 230036;2.安徽省智能农机装备工程实验室,合肥 230036)
0 引言
随着我国经济水平的提高,拖拉机驾驶员对乘坐舒适性要求越来越高,座椅直接影响驾驶员乘坐舒适性。由于农作物的耕种和收获季节性强,驾驶员集中作业时间长、作业强度大,持续疲劳容易引起腰椎损伤[1],88%的驾驶员腰骶部患有疾病[2]。当拖拉机在高低垄犁地作业过程中,驾驶舱倾斜导致驾驶员上躯干产生侧倾,驾驶员长时间的扭腰操纵作业,对腰椎产生巨大伤害[3-4]。
为了提高拖拉机驾驶员乘坐舒适性,国内外研究人员主要从驾驶室布局、座椅减振、驾驶室噪声控制等方面开展研究。通过优化拖拉机驾驶室布局设计,提高驾驶员上躯干操纵的便捷性,进而提高驾驶员乘坐舒适性,如文献[5-6]提出对不同型号的拖拉机,通过对拖拉机驾驶室的造型、色彩、结构安全性进行研究设计,优化其方向盘、操纵杆和踏板的位置布局,能够使驾驶室舒适性、视野性能及易操作性都得到改善;杨洋等[7]通过优化踏板连杆长度、连杆夹角以及踏板-座椅布局降低踏板阻力,可减少驾驶员下肢受力。通过在驾驶室增加座椅减振装置可提高驾驶员舒适性,如文献[8-10]研究设计座椅悬架系统,可有效将输入振动的垂直振动大幅度降低;还有学者研究设计了拖拉机座椅的座垫材料[11-13],能够对拖拉机作业时产生的振动传递率和共振频率产生显著影响,促进驾驶员的身心健康。郭广伟等[14]提出降低噪声可保护驾驶员的身心健康,使用吸音材料以及采用阻尼处理,减少噪声反射的声能和辐射;顾伟等[15]、王德海等[16]对拖拉机消声器进行优化设计,对拖拉机驾驶室结构噪声的治理,具有良好的效果。为给驾驶员提供健康舒适的气候工作条件,文献[17-18]研究设计了拖拉机驾驶室空气循环系统,给驾驶员提供经过过滤的洁净、温度适中的空气流,减轻灰尘、农药和烟气的侵害,同时制冷、制热系统可在炎热夏季和寒冷冬季给驾驶员一个舒适的工作环境。但是,针对拖拉机在深耕作业过程中,驾驶员侧倾坐姿导致驾驶员容易产生疲劳,加剧腰椎损伤的现状,目前还没有相关研究。
本文针对拖拉机在高低垄犁地作业中,导致驾驶员侧倾坐姿的现状,设计一款基于人机工效学的农机座椅自动调平系统[19-22],确保拖拉机倾斜作业过程中驾驶员坐姿不发生显著变化,同时通过空气弹簧和阻尼器减振保证座椅的舒适性。
1 座椅自动调平系统总体设计
座椅自动调平系统结构如图1所示,主要由座椅调平机械装置及控制系统组成。座椅调平机械装置主要由单级剪叉式机构、空气弹簧、阻尼器、旋转板和底座等部件组成,调平机构通过推杆电机伸缩控制座椅椅面保持水平姿态。工作原理如图2所示,当拖拉机在田间倾斜作业时,通过椅面下方安装的座椅倾斜角度传感器检测座椅倾斜角度,控制决策系统将座椅倾斜角度信号和推杆电机电压信号作为输入量,融合卡尔曼滤波对PID参数进行整定,得到控制推杆电机的PWM(脉冲宽度调制)方波信号,控制推杆电机伸缩,维持座椅椅面保持水平姿态,达到提高驾驶员乘坐舒适性的目的。

图1 座椅自动调平系统总体结构图Fig.1 Overall structure diagram of automatic seat leveling system1.旋转板 2.单级剪叉式机构 3.阻尼器 4.底座 5.空气弹簧 6.角度传感器
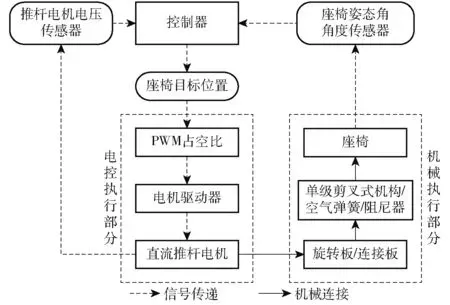
图2 座椅自动调平系统原理框图Fig.2 Principle block diagram of automatic seat leveling system
2 关键部件结构设计
2.1 减振结构
拖拉机在非结构路面行走时,驾驶员处在全身剧烈振动的环境中,因此需要设计减振装置,如图3所示,座椅调平减振装置在采用单级剪叉式机构的基础上添加了空气弹簧和阻尼器。空气弹簧具有良好的非线性硬特性,能够有效减振,避开共振,防止冲击。阻尼器对于座椅的垂向振动可有效降低振动加速度PSD(功率谱密度)峰值,降低对人体脊椎伤害。减振机构底座长L1、宽L2需满足拖拉机驾驶舱原车座椅椅垫支撑要求,取L1=400 mm,L2=250 mm。

图3 减振机构Fig.3 Damping mechanism1.阻尼器 2.空气弹簧 3.减振机构底座
2.2 调平装置结构
调平装置结构如图4a所示,由底座、前旋转板、后连接板和推杆电机组成,其中点A为座椅处于最大倾斜位置时,即旋转板处于右极限位置,长端刚好触碰到推杆电机的极限点。后连接板连接推杆电机另一端,固定在底座上。底座长宽需满足拖拉机驾驶舱内安装座椅预留螺纹孔的位置要求。

图4 座椅调平机构结构示意图Fig.4 Structural diagrams of seat leveling mechanism1.前旋转板 2.底座 3.后连接板 4.推杆电机
前旋转板是座椅调平的关键零件,采用L形设计,可节省空间且便于推杆电机安装,L形的长端与座椅底座焊接,短端与推杆电机铰接,其设计参数需满足
L4>L3tanα
(1)
式中L3——L形零件长度,根据驾驶室空间确定,取250 mm
L4——旋转板短端长度
α——旋转板转动角
推杆电机与旋转板铰接驱动座椅椅面旋转,实现座椅姿态调整,因此,需要建立推杆电机伸缩长度与椅面旋转角度的数学模型。如图4b所示,将旋转板的长端简化成AC段,短端简化成OA段,座椅倾斜角α近似等于拖拉机倾斜作业时的倾斜角,拖拉机左倾时座椅转动角为正,拖拉机右倾时座椅转动角为负。推杆电机伸缩长度与椅面相对于底座旋转角关系为
(2)
式中La——点O、A之间的长度
L0——推杆电机最短的长度
L——推杆电机伸缩工作长度
Lb——点A、B之间的长度
推杆电机推力和驾驶员的体重之间关系为
(3)
式中F——推杆电机推力
G——驾驶员体重
Δh——驾驶员重心与座椅距离
h——驾驶员与座椅垂直距离
H——座椅中心点D与电机距离
设定驾驶员体重为800 N,最大倾斜角为15°,实际测量H≈40 cm,h≈50 cm,即推力F在最大倾斜角工况下应大于850 N。
3 自动调平装置控制器设计
3.1 控制器硬件设计

图5 控制系统电路图Fig.5 Control system circuit diagram
自动调平装置控制系统主要由电源模块、ADC(模拟数字转换器)电压采集模块、座椅椅面姿态采集模块、推杆电机驱动模块、座椅调平执行模块和座椅椅面调平控制系统组成[23-24]。其中系统反馈推杆电机的运行位置,需ADC电压采集模块采集直流推杆电机电压来完成。电源模块由拖拉机蓄电池供电,由于ADC电压采集电路需3.3 V供电,将12 V转化为3.3 V同时加入滤波电路以保护电路。拖拉机田间作业地面起伏较多,采用带有数字运动处理器硬件加速引擎的MPU 6050模块,在动态情况下能够稳定地向控制器输出座椅姿态角。由于推杆电机需频繁正反转,采用TR2104S芯片设计的电机全桥驱动电路,通过控制器输出PWM和高低电平,对PWMH、PWML、SR及PHASE端(输出模式)进行控制,实现H桥的上下桥臂交替导通。控制系统电路图及其控制器硬件配置分别如图5和表1所示,控制器硬件电路实物图和电机驱动板实物图如图6所示。

表1 控制系统硬件配置Tab.1 Hardware configuration of control system

图6 调平系统控制器Fig.6 Hardware physical drawing
3.2 系统控制精度
将座椅自动调平装置安装在东方红LX754型拖拉机上,利用叉车将拖拉机单侧抬起,使拖拉机与地面产生倾斜,控制器中MPU 6050模块采集当前拖拉机倾斜角,座椅角度传感器采集座椅倾斜角。记录拖拉机倾斜3°、5°、10°和15°时,座椅椅面水平控制误差,每种工况重复试验3次,试验场景如图7所示。试验结果如图8所示,调平系统在拖拉机倾斜角为10°时,平均误差最大为0.4°,说明调平系统在拖拉机上具有较高的控制精度。
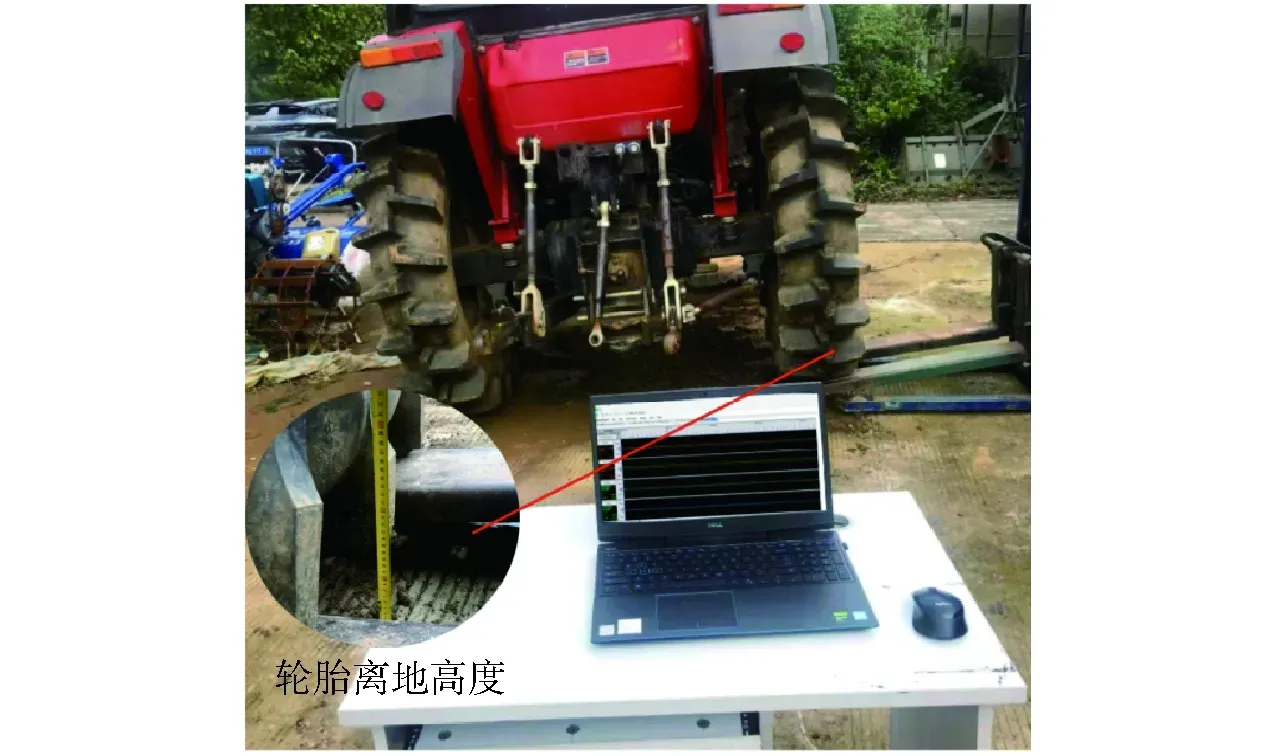
图7 系统精度试验Fig.7 System accuracy test

图8 座椅椅面水平控制误差Fig.8 Horizontal control error of seat surface
4 基于驾驶员乘坐舒适的座椅调平控制策略
4.1 控制策略基本要求
(1)当拖拉机在田间作业时,环境多为凹凸不平地面,为了避免座椅频繁调平导致驾驶员不舒适,同时避免推杆电机频繁工作影响使用寿命,需要设定座椅椅面调平工作阈值。
(2)座椅椅面调平速度也直接影响驾驶员乘坐舒适性,因此还需确定合适的推杆电机速度,确保座椅椅面调平过程驾驶员处于舒适状态。
4.2 控制策略确定
通过研究拖拉机侧倾角对驾驶员坐姿的影响,结合驾驶员主观评价结果确定座椅调平控制策略。
4.2.1试验方案
为了研究拖拉机侧倾角对驾驶员坐姿的影响,搭建座椅倾斜角连续可调的试验台,如图9所示,通过推杆电机驱动试验台倾斜,模拟拖拉机倾斜作业姿态。选择12名在35~55岁之间具有2年以上拖拉机驾驶经验,腰部无疾病或创伤的健康男性(身高(171.5±3.7)cm,质量(70.2±5.7)kg)。试验开始前,所有参与者都详细了解试验流程。
为准确获取倾斜姿态下驾驶员坐姿变化,如图9所示,采用Codamotion Odin主动光学三维动作捕捉系统,捕捉布置在驾驶员上躯干的Marker点,获得驾驶员脊柱空间位姿,系统测试精度0.01 mm。三维动作捕捉Marker点分别布置在驾驶员第一胸椎(T1)、第三胸椎(T3)、第七胸椎(T7)、第九胸椎(T9)、第十一胸椎(T11)、第一腰椎(L1)、第二腰椎(L2)、第三腰椎(L3)、第四腰椎(L4)、第五腰椎(L5)、第五腰椎两侧和座椅两侧。三维动作捕捉系统采样频率设置为100 Hz,台架倾斜角分别调至3°、5°、10°和15°,分别采集布置在脊柱上的点空间三维坐标,获取拖拉机驾驶员脊柱空间坐标位置。

图9 试验模拟图Fig.9 Test simulation diagram
为获得调平座椅推杆电机伸缩控制速度,开展乘坐舒适性主观调查试验,主观评价采用5分制,1、2、3、4、5分别为非常满意、比较满意、中等、较差、不满意。首先,试验台架调整倾斜至15°,受试者静坐在调平座椅上,调平座椅推杆电机分别以4、6、8、10 mm/s的速度驱动调平座椅从倾斜状态调整到水平位置,试验结束后记录受试者乘坐舒适性主观评分。受试者每天只试验一次,试验重复3次。
4.2.2座椅调平阈值
随机挑选1名受试者脊柱Marker点空间位置坐标数据,绘制驾驶员脊柱在冠状面内的侧弯图,如图10所示,随着试验平台倾斜角的增加,受试者脊柱侧弯增加。各个椎体的投影偏移量依次(L4~T1)减去前一个椎体的投影偏移量,得到椎体投影偏移量的增加幅度,统计结果如图11所示。

图10 受试者脊柱侧弯变化曲线Fig.10 Subject scoliosis curves

图11 侧倾角对胸椎/腰椎位姿影响的统计结果Fig.11 Statistical results of influence of roll angle on thoracic/lumbar posture
由图11可知,腰椎L3和腰椎L4在冠状面上的投影偏移较大,所以腰椎L3和腰椎L4段影响程度较高。对比拖拉机侧倾3°和5°试验结果,可以发现受试者胸椎和腰椎在冠状面内的最大投影偏移显著增加,拖拉机侧倾角度对受试者坐姿产生显著性影响(P<0.001)。基于此,确定座椅椅面调平工作阈值为3°。
4.2.3驾驶员乘坐舒适状态下座椅椅面调节速度
针对调平座椅推杆电机不同伸缩速度,受试者主观打分结果如图12所示,伸缩速度为6、8 mm/s时主观评价平均得分较高,也较为接近。评价结束后,对受试者回访得知,伸缩速度10 mm/s主观评价分值较低,主要原因是驾驶员腰部难以响应较快的座椅调节速度。伸缩速度4 mm/s主观评价分值较低,主要是调整速度太慢,在座椅调平的过程中,受试者较长时间处于侧倾姿态,舒适性较低。由此设定座椅椅面调节速度阈值为6~8 mm/s。
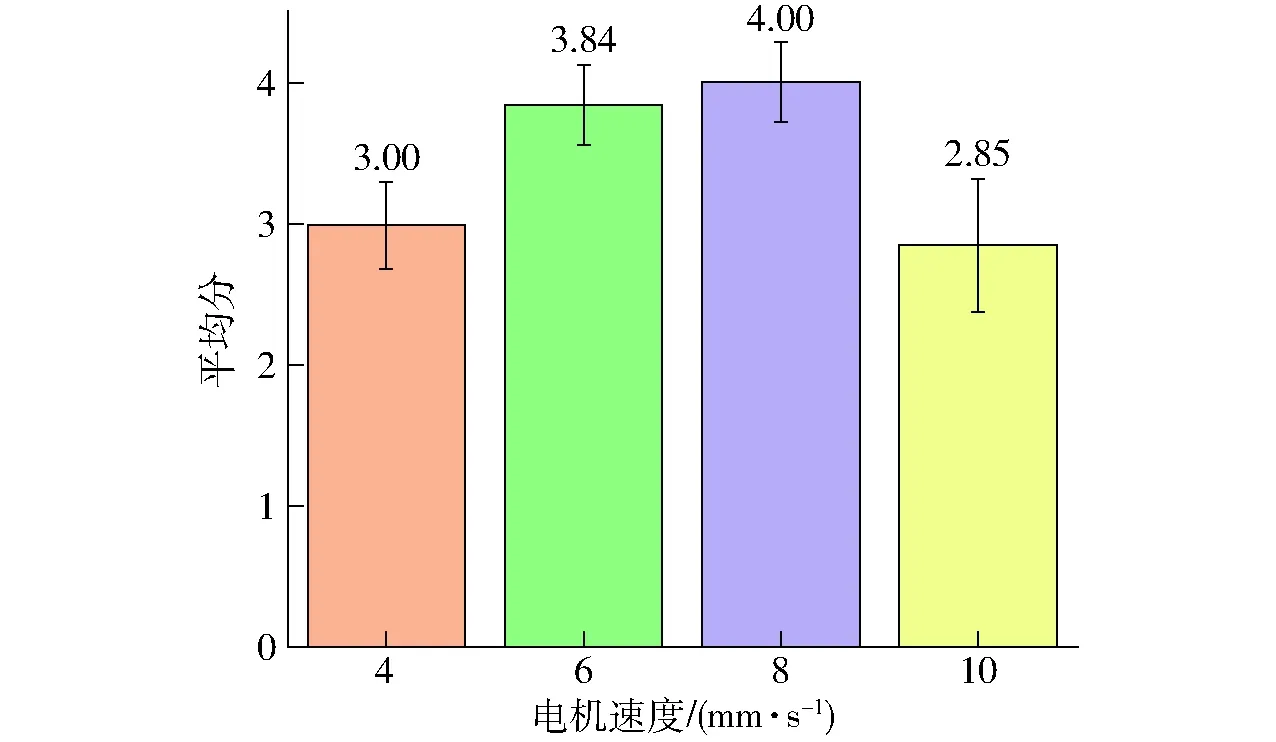
图12 主观评价数据Fig.12 Subjective evaluation data
5 实车试验
5.1 调平系统对腰部肌肉影响分析
5.1.1试验方案
将调平座椅安装在东方红LX754型拖拉机上,在安徽农业大学农萃园进行田间试验,田间具有坡度较大斜坡,拖拉机行驶速度保持在0.6 m/s左右,如图13所示。为了客观评价驾驶员乘坐舒适性,采用DELSYS公司生产的无线表面肌电系统(TrignoTM wireless EGM system)测试驾驶员肌肉肌电信号,表面肌电试验选择5名驾驶员作为受试者,驾驶员侧倾主要是腰部肌肉发力,因此选择L5腰部竖脊肌作为测试肌肉[25]。在试验开始前,所有受试者刮掉背部测试部位的绒毛,并用医用酒精擦洗背部皮肤。

图13 实车试验Fig.13 Real vehicle test
第1天座椅未调平,受试者驾驶拖拉机在地间行驶10 min,在第10分钟采集30 s表面肌电数据;第2天调平系统正常工作,受试者驾驶拖拉机以相同工况在田间行驶10 min,在第10分钟采集30 s表面肌电数据,并记录座椅和拖拉机实时倾斜角。试验设置采样频率设置为1 926 Hz,数据用EMGWorks Analysis进行分析,为了消除运动伪影,采用高通滤波在10~450 Hz对信号进行滤波,再对其进行整流处理。对于整流后的数据,截取其中波动幅度较为平均的5 s数据,利用均方根(RMS)对整流后的肌电数据进行平均。在正式试验前一天,所有受试者被要求采集竖脊肌的最大随意收缩(MVC),采用Biering-Sorenson位置测量竖脊肌的MVC[26],测量时间为5 s,每次试验间隔5 min,试验重复3次。
在试验过程中记录驾驶员乘坐安全感主观感受,采用五级打分制进行评价,分别为:安全感很好(5分)、安全感较好(4分)、安全感中等(3分)、安全感较差(2分)、安全感很差(1分)。
5.1.2结果分析
为了消除表面肌电在个体之间的差异,用实际测的肌电幅度与最大随意收缩时肌电幅值的比值,即最大自主收缩百分比(MVE),进行试验结果对比分析。
座椅未调平时左、右竖脊肌的MVE平均值为21.73%、15.19%,调平后左、右竖脊肌的MVE平均值为18.74%、17.98%。测试过程驾驶员行驶方向左侧地势较低,因而向右回正身体时左竖脊肌被拉长,所以左侧竖脊肌MVE平均值大于右侧,座椅调平后,左右两侧竖脊肌MVE平均值较为接近,腰部两侧同时受力,能够较好缓解驾驶员腰部肌肉疲劳。
拖拉机田间倾斜行走过程,座椅椅面倾斜角如图14a所示,座椅倾斜角与理论调平角误差如图14b所示,其中阶段1为座椅倾斜角度未达到倾斜角阈值,该阶段调平系统不工作,阶段2为拖拉机倾斜超过预设值,座椅进行调平,在该段时间内座椅调平的平均误差为0.38°,均方根误差为0.21°,实际最大误差为0.67°,可满足实车条件下座椅调平的工作要求。5名驾驶员的平均评价分为4.1分,均方根误差为0.625,座椅调平过程中驾驶员具有较好的安全感。

图14 拖拉机倾斜及座椅调平测试结果Fig.14 Tractor tilt and seat leveling test results

图15 拖拉机操控准确度测试系统及直线路径试验Fig.15 Tractor handling accuracy test system and straight path test
5.2 调平系统对驾驶员操作适应性影响分析
5.2.1试验方案
设计拖拉机操纵准确度测试系统,评价驾驶员操纵方向盘和挡位的适应性。如图15a所示,在车轮位置安装拉杆传感器测试车轮转角,放置在驾驶室的测试系统显示屏显示车轮转角控制的目标值,驾驶员操纵方向盘进行车轮转角预设值跟踪控制。驾驶员通过观察显示屏内的车轮转角实时测试反馈结果,控制方向盘完成转角跟踪控制,记录车轮到达目标值的控制完成时间。测试系统随机发出挡位指令,驾驶员完成挡位操纵后,点击屏幕上“挂挡完成”按钮,记录驾驶员完成挂挡操作时间。试验设置3种工况:拖拉机未倾斜(工况1)、拖拉机倾斜15°,座椅调平系统未工作(工况2)、拖拉机倾斜15°,座椅调平系统工作(工况3),由5名驾驶员进行试验,每种工况试验3次。
通过驾驶员操纵拖拉机跟踪直线路径的横向误差评价路感变化对驾驶员操控准确性影响,试验场景如图15b所示,车轮两侧高度差为13.5 cm,拖拉机侧倾5.1°,拖拉机分别安装原车座椅和调平座椅开展直线路径试验。分别由5名驾驶员操纵拖拉机以速度0.6 m/s沿直线参考线进行路径跟踪驾驶,采用北斗差分定位系统(北京北斗星通C200-AT-P,精度0.2 cm)记录拖拉机行走轨迹,计算拖拉机直线路径跟踪过程横向误差。
5.2.2结果分析
拖拉机前轮转动到预设角度时间和挂挡时间如图16所示,对比工况2与工况3,座椅调平系统的使用提高了方向盘和挡位的操作效率,说明调平系统对驾驶员操纵适应性有促进作用。

图16 拖拉机转向及挂挡完成时间Fig.16 Tractor steering and gearing completion time
拖拉机直线路径试验结束后,随机选取一名驾驶员的驾驶轨迹,两种工况下拖拉机所行驶的轨迹如图17a所示;横向误差如图17b所示,当座椅未调平时,平均误差为0.032 m,最大横向误差为0.123 m,座椅调平时,平均误差为0.031 m,最大横向误差为0.114 m。座椅调平后,操纵拖拉机行走直线的平均误差降低了3%,最大横向误差降低了8%。通过座椅调平系统提高了方向盘操控的准确性。
6 结论
(1)设计了一种基于驾驶员舒适性的拖拉机座椅调平控制系统,提出了基于驾驶员乘坐舒适的座椅调平控制策略,开发了座椅调平系统控制器,根据座椅角度传感器实时反馈座椅倾斜状态,实现座椅的自动调平,系统调平的平均误差为0.38°,调平效果较好。驾驶员背部肌肉肌电评价对比试验表明,调平后腰部左、右竖脊肌的MVE平均值为18.74%、17.98%,相比未调平时腰部发力均匀,能够很好地保护驾驶员腰部肌肉。

图17 拖拉机直线路径试验测试结果Fig.17 Test results of tractor straight path test
(2)开展了实车试验,在拖拉机倾斜15°调平系统工作过程中,车轮转动到预设角度平均时间为2.71 s,挂挡完成平均时间为1.94 s,相比较拖拉机倾斜座椅未调平状态,调平系统对驾驶员操作性及适应性有促进作用。拖拉机直线行驶路径跟踪试验表明,座椅调平时,拖拉机行驶轨迹的平均误差为0.031 m,最大横向误差为0.114 m,分别降低了3%、8%,可知在路感变化情况下,通过座椅自动调平提高了拖拉机操控的准确性。
