有人/无人机协同作战运用研究现状与展望
2022-08-05柳文林潘子双吴立尧
柳文林,潘子双,韩 维,李 樾,吴立尧
(1.海军航空大学,山东 烟台 264001;2.92728部队,上海 200443;3.91404部队,河北 秦皇岛 066000)
无人机作为新型的空中作战力量,具有零伤亡、低成本、易扩展等突出优势,在军事领域发挥着重要的作用。未来,无人机将进一步拓展作战样式,改变战争面貌,从而引发战争制胜机理的深刻变革。然而,当前无人机因受到平台智能水平和有效载荷的限制,不能适应日益复杂化的动态、对抗战场环境。因此,将作战性能优异、感知能力强、决策周期短的有人机作为指挥机,将战术实现灵活、持续作战能力强且全寿命、成本低的无人机作为攻击机,两者构成的有人/无人机编队,通过彼此之间的密切协同来完成作战任务。这是加快无人机装备融入当前作战体系,实现有人机和无人机的优势互补,提高作战效能的有效方式。
有人/无人机协同系统是一类典型的异构系统,该系统协同作战运用涉及的关键技术主要有协同人机交互、协同态势感知、协同任务规划和协同编队控制等。本文重点从有人/无人机协同规划控制角度,对有人/无人机协同作战运用发展现状和关键技术研究进行梳理,并对后续发展做出展望。
1 相关项目进展
有人/无人机协同作战作为全新的作战样式,已成为第六代穿透型战机的发展方向之一,受到世界部分国家的高度关注。美国军方早在1993 年就提出了“基于编队的有人/无人航空平台能力”的先进作战概念,旨在利用无人机在4D(Dull,Dirty,Dangerous and Deep)环境下执行侦察打击任务。近年来,人工智能领域的高速发展和技术的突破,进一步推动了有人/无人机协同领域相关作战概念以及验证项目的开发。
美国空军研究实验室(AFRL)于2015 年发起“忠诚僚机”项目,该构想中,有人机将作为长机对无人僚机进行指挥控制。基于这一构想,在实际作战过程中,无人机突前展开目标搜索、定位和跟踪,实现作战载荷的分布式部署,保证了有人机这一高价值平台的安全;另外,通过数据链的稳定连接,编队之间实现紧密协同,大大拓宽了有人机的态势感知范围,最终实现“先敌发现,先敌打击”的战术优势。XQ-58A(女武神)无人机采用隐身设计且价格低廉,是“忠诚僚机”的理想机型。该机型于2019年3月完成首飞,并在随后的4 次飞行试验中完成了对于飞行性能的验证。基于反介入/区域拒止的战略背景,美军相继涌现出一系列面向未来强对抗环境的新型作战概念,其中大部分都以有人/无人机协同作战的形式为落点。以分布式作战概念为例,其核心思想是将原本集中在单一高价值作战平台上的能力分散部署到大量低成本的小型异构平台上。作战过程中,有人机主要负责决策并向无人机下达指令,多个平台通过动态自适应的方式组合形成杀伤网,使敌方陷入认知和决策困难,从而大大提高己方整体的作战效能。以分布式作战概念为牵引,美军开展了一系列技术支撑项目,如“分布式作战管理(DBM)”“拒止环境中的协同作战(CODE)”以及“体系综合技术和试验(SoSITE)”等,并且同步安排了“小精灵(Gremlins)”“进攻性蜂群使能战术(OFFSET)”等装备项目的研发。俄罗斯也以苏-57 战机和S-70(猎人)隐身无人机为组合,开展了类“忠诚僚机”概念项目的研究。目前,S-70无人机已经具备机场自主起飞并返航的能力。相较于国外,我国无人机技术的研究虽起步较晚,但近年来,随着无人化、智能化技术的不断发展,我国在有人/无人机协同作战领域也开展了大量具有针对性的研究并取得了一定的技术突破。2014年9 月,由中航工业主持的“伴飞型无人机”项目完成了1架双模驾驶有人机与3架无人机顺序起飞、编队会合、队形变换,有人/无人双模驾驶、编队解散,在线航路重规划和顺序着陆这一完整运行概念的半物理验证。2020年10月,中国电子科学研究院开展的陆空协同固定翼无人机“蜂群”系统的试飞试验,标志着我国正式拥有了实用化的无人机“蜂群”。但总的来说,我国在有人/无人机协同技术上的研究还处在摸索阶段,目前,仍缺乏对顶层技术的论证和关键技术的突破,距离系统研制和真正列装还存在较大差距。
2 有人/无人机协同作战指挥控制架构
传统的无人机编队飞行主要依靠地面基站的集中控制,地面操作人员将根据战场态势和无人机回传的数据来指挥编队执行任务。而有人/无人机指挥控制系统是将有人机平台和无人机平台整合为分布式一体化的作战系统,飞行员不仅操纵飞机,而且还要完成对无人机编队的指令下达。相对而言,有人/无人机协同作战模式可以有效解决通信时延带来的决策滞后问题,从而实现编队内部的一致性态势感知与战术决策。典型的指挥控制架构,如图1所示。
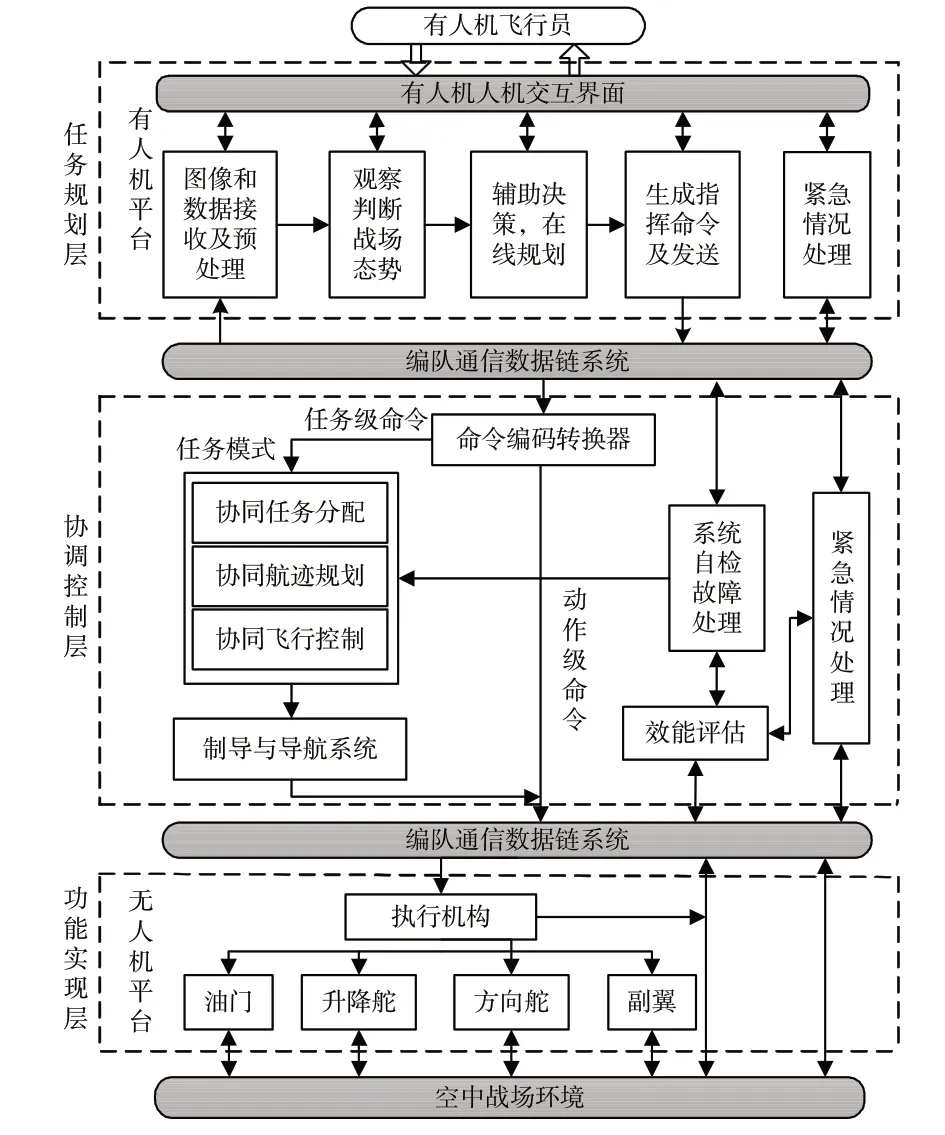
图1 有人/无人机协同作战指挥控制架构[10]Fig.1 Manned/unmanned aerial vehicle coordinated operational command and control architecture[10]
典型的指挥控制架构,主要包括任务规划层、协调控制层以及功能实现层。其中:任务规划层负责态势感知并进行在线决策;协调控制层负责对决策命令进行编码,并生成动作级命令;功能实现层负责机身各个执行机构的调整,生成相应的机动动作。
3 关键技术
有人/无人机协同作战指挥架构中的协调控制层主要涉及的是协同规划控制问题,这是一类极具复杂性和耦合性的多约束、多目标决策优化问题,当前的主流观点是基于分层递阶思想,将该问题解耦为协同规划层和协同控制层,其中:协同规划层包括协同任务分配与协同航迹规划;协同控制层包括航迹跟踪与队形保持。
3.1 协同任务分配
有人/无人机协同任务分配问题需要重点研究不同于有人机意图下的异构无人机任务分配与调度,即在考虑无人机作战性能、作战半径、载荷类型等各方面约束下,将无人机和目标任务相匹配并生成执行调度序列,最终实现作战效能的最大化。可以看出,协同任务分配是1 项复杂的任务指派和资源调度问题。此外,协同任务分配还与协同航迹规划问题紧密耦合,在任务分配时,需要考虑相应的航程代价,同时,该问题也是后续开展航迹规划的前驱条件,即在航迹规划前需要确定各平台具体的使命任务和协同方式,并将多个航迹段的初始状态和终端状态作为航迹规划的输入参数。
针对协同任务分配,当前的通用做法是先将其抽象为经典的组合优化问题,参考现有模型对问题中的决策变量、约束条件以及目标函数进行数学编码,再利用相应的理论和算法进行求解。其中混合整数线性规划(Mixed Integer Linear Programming,MILP)和协同多任务分配问题(Cooperative Multiple Task Assignment Problem,CMTAP)模型由于扩展性好,可以用于描述各类复杂的时空约束,应用最为广泛。就求解算法而言,可以将任务分配问题进一步分为集中式和分布式2种。
3.1.1
集中式任务分配架构中,存在1 个信息控制和决策中心,各无人机平台向中心实时或周期性通报态势信息,从而保证任务分配结果做到全局最优。然而,由于任务分配问题的NP 特性,随着问题求解规模的扩大,如果继续追求全局最优解,最终将造成维数灾难。显然,集中式任务分配对于规模效应较为敏感,同时,面对实时动态环境,态势信息的频繁更新,集中式求解架构极易造成通信拥塞和决策困难。为了在求解速度和解的质量之间取得平衡,采用智能优化算法进行任务分配问题的求解已成为当前的主流做法。
典型的算法有遗传算法(Genetic Algorithm,GA)、粒子群优化(Particle Swarm Optimization,PSO)和蚁群优化(Ant Colony Optimization,ACO)等,此类算法复杂度低,易于实现且具有良好的扩展性,可以与其他算法结合来提升算法性能。文献[16]通过对遗传算法进行分布式改进,加快了异构无人机任务分配问题的求解速度;文献[17]将非支配排序遗传算法和岛屿模型、主从模型结合,采用混合式架构将无人机编队划分为多个编组,编组之间采用并行运算机制,并通过各自的master节点迁移优解和环境信息,从而实现编组之间的快速学习进化。由此可见,对集中式求解算法进行分布式改进,在计算过程中引入并行机制是加快算法求解速度的有效方式。文献[19]对量子粒子群算法(Quantum Particle Swarm Optimization,QPSO)做出进一步改进,采用均匀化级联Logistic 映射增强初始种群的多样性,有利于搜索到全局最优解;基于高斯概率分布对粒子进行变异操作,以跳出局部最优。姚佩阳团队将动态列表(Dynamic List Scheduling,DLS)作为启发策略与智能优化算法相结合,通过动态列表缩小搜索范围,加快算法的求解速度;文献[21]针对离散粒子群优化-郭涛(DPSO-GT)算法易陷入局部最优的问题,引入模拟退火(Simulated Annealing,SA)Metropolis 准则,在迭代过程中不但接受优化解,而且还按照一定概率接受相对较差的解,从而跳出局部最优;文献[22]提出1 种基于变领域搜索(VNS)算法用来改善PSO 算法陷入局部收敛的问题,并且设计了1种概率启动准则,特别针对陷入局部最优的粒子采用较高的概率进行变领域搜索,从而避免大范围执行跳出局部收敛的策略,降低了算法整体的计算开销。综上,针对智能优化算法的改进,主要集中在提高算法求解速度和跳出局部最优2 个方面,采用并行计算架构和加入启发信息,可以提高算法的求解速度,增加种群多样性、调整算法参数或结合局部搜索能力强的算法,可以实现跳出局部最优。
3.1.2
分布式任务分配架构中,无人机通过互相之间的通信协商实现任务协调。由于没有统一的信息节点,无人机往往只需掌握相邻无人机的状态信息即可,但这样难以保证任务分配解的质量,同时还要在任务协调阶段进行一致冲突消解。分布式任务分配的研究重点主要有2类:一是基于市场机制的方法,包括合同网算法和拍卖算法;另一类是基于群体智能的方法。
合同网算法借鉴经济行为中“招标—投标—中标—签约”机制,具备任务执行能力的无人机通过竞争和协商来压低任务执行的代价。拍卖算法最早由Bertsekas提出,本质上属于具有多项式时间的树搜索算法,无人机按照多种拍卖规则争取任务归属权。基于市场机制的分配方式需要在一定规模的无人机群体之间进行多轮的通信协商。为降低这一过程中的通信负载压力,可以基于特定的评价体系构建任务熟人集,在招标前对任务执行主体进行初步的筛选,从而降低通信和计算开销。类似的方法还有基于范例推理和忽略过期消息等。在通信受限的无人机编队作战任务场景中,无人机往往只能在局部建立统一的通信网络用于协商任务策略,这与基于市场机制的任务分配框架非常类似。文献[28]在考虑无人机通信范围的基础上,基于合同网算法完成了多无人机的动态任务分配。此外,针对由于通信延时造成的无人机态势感知不一致,产生任务冲突的问题,文献[23]设计了基于时间戳的一致性冲突消解算法。此外,由于决策时间为多项式时间且采用分布式松散架构,基于市场机制的任务分配在动态不确定场景中表现出良好的鲁棒性。
基于市场机制的方法采用显式通信,天然存在通信负载大的缺陷,而基于群体智能的算法往往采用“刺激-响应”机制的隐式通信,通过个体与个体以及个体与环境之间的简单交互,涌现出被称为共识主动性(Stigmergy)的群体智能,从而自组织完成复杂任务。文献[31]参考蚁群算法构建动态信息素地图,并设计状态转移函数来引导多个个体自组织完成侦察任务;文献[32]在此基础上引入Dubins曲线,最终完成多无人机任务分配和路径规划的一体化求解;文献[33]通过降低个体对同一类型任务的响应阈值,从而产生动态学习效果,加快任务分配时的决策速度。
综合上述分析,集中式任务分配调度与战前规划的应用场景比较贴近,在充分考虑各类敌方情报、自身作战能力以及预期作战效果的基础上,弱化实时性要求,制定详细的任务分配时空方案,从而确定编队飞行“转运点”和调度序列。分布式任务分配过程是基于无人机之间的交互协作开展具体的作战行动,这与编队实时交战的进程较为类似。同时,分布式任务分配过程求解速度较快,满足了实时性要求,在编队动态合作与集群对抗应用方面获得了良好的实验结果。利用分布式任务分配调度技术,可以实现作战过程中分段航迹目标点的快速标定。
3.2 协同航迹规划
有人/无人机系统本质上是异构的多智能体系统,对于异构机群的航迹规划,需要结合任务规划指标、飞行约束条件和战场环境等因素,设计协同飞行航迹,以优化总体作战效能。根据对飞行航迹的描述粒度可以将航迹规划进一步分为航路规划和轨迹规划。航路规划通常将任务空间离散化处理,以降低问题求解难度,随后采用图搜索或者树搜索的方法进行路径寻优。图搜索法利用网格图的形式进行航迹规划,是机器人领域广泛采用的1种重构方法,但在与飞行器动力学模型结合时存在难度,且求解实时性较差;树搜索是1 种基于采样的单查询随机搜索算法,其无须在规划前对节点扩展进行预处理,但计算量较大,在节点处不利于跟踪,拓展到多智能体航迹规划中较为困难。另外,势场法由于算法简单、实时性好而得到广泛运用,但是在未知环境且存在动态障碍的情况下,建模存在一定的难度,极易陷入局部最优值。
在实际应用过程中,上述的各类航路规划算法具备良好的扩展性,可以互相借鉴融合,以满足规划速度和动态性的要求。另外,协同航路规划结果可以作为参考解,用于任务分配过程中的航程估计,实现航路规划和任务分配的一体化求解。轨迹规划充分考虑飞行器的飞行性能,基于控制量参数建立微分运动方程,从而将轨迹规划问题转化为最优控制问题,同时,后期可以更好地对接航迹跟踪控制算法。其求解办法主要有直接法和间接法2种。间接法由于数学推导过程复杂,且存在收敛半径小、对初值敏感等问题,在轨迹规划方面应用不多;直接法进一步将最优控制问题转化为参数优化问题,可以采用非线性规划的相关算法进行求解。其中:启发式算法在用于多机轨迹规划时,计算时间长且不易收敛;伪谱法具备良好的收敛性和较低的初值敏感度,但建模存在一定难度且容易陷入局部最优;凸优化作为1 种新兴的最优控制算法,近年来在多机协同航迹规划领域得到了广泛运用。
随着无人机作战运用的不断推进,航迹规划过程更加注重实战化背景的多要素扩展。多机协同问题作为编队协同战术实现的基础,是当前航迹规划研究的1 个热点,其中编队内部避碰以及提高计算效率是问题求解的关键。文献[44]针对有人/无人机编队协同问题,引入时空协同约束设计了编队规划器,充分保证编队,特别是有人机的飞行安全;文献[45]提出了1 套基于定制内点法的凸优化子问题求解流程,将多无人机航迹规划求解耗时降低到秒级;文献[46]基于动态优先级将无人机集群航迹规划解耦为多个单机航迹规划,降低了问题求解难度;文献[47]提出1种空间分层的多机协同航迹规划策略,将计算量由指数增长转化为多项式乘积,有效降低了算法对规模效应的敏感度。
隐蔽突防作为综合考虑飞行器动力学约束以及真实战场中电磁空间特性的现实问题,对规划航迹的安全性以及有效性提出了进一步要求。文献[48]将飞行高度作为目标函数之一,旨在规划“贴地飞行”的低空突防航迹,但是对于飞行性能约束以及战场环境的建模过于简化;文献[49]考虑隐身无人机相对于敌防空雷达姿态角引起的RCS变化,以总探测概率最低为目标,完成了雷达网突防航迹的快速规划;文献[50]在航迹规划过程中进一步考虑地形遮蔽对雷达发现概率以及视距(Line of Sight,LOS)的影响;文献[51]针对多普勒体制雷达盲区特性,研究非隐身无人机的突防航迹;文献[52]将远距离支援干扰空域划设与突防航迹规划作为多机协同突防问题的一体两面进行了综合考虑。
为充分达成预期作战效果,无人机战术的展开阶段对航迹规划的精度要求已经提高到了战术动作级别。此外,在分布式作战背景下,作战资源采取分散部署的策略,多无人机在任务执行过程中需要彼此之间展开战术协同。为此,需要针对具体的任务类型从作战效能的角度出发,进行战术动作规划以及多机协同航迹规划。文献[53]针对飞行器投弹过程,将多种基础飞行动作制定为战术模板,实现了从轨迹优化问题到参数优化问题的转变,降低了问题求解难度;文献[54]通过导弹制导律模型反解出无人机执行投弹任务时的终端状态约束,采用最优控制理论完成无人机攻击占位的航迹规划;文献[55]对“垂直散开”战术进行数学描述,抽象出多个战术导航点,以便进一步的航迹规划;文献[56]对多机协同航迹欺骗的时空约束条件进行深入分析,采用Legendre伪谱法求解建立的最优控制模型;文献[57]从动力学控制的角度对无人机利用地面无人车进行空地协同加油的任务场景展开研究,旨在延长无人机的有效任务时间;文献[58]针对长机投弹攻击、僚机照射引导的战术协同过程,结合hp 自适应伪谱法完成无人机协同对地攻击分段航迹优化。
综上分析可知,当前航迹规划的相关研究正朝着具体任务场景下的实际作战过程扩展。应瞄准异构多机之间的高效协同,科学运用各种机动策略,提高作战编队的突防概率和打击效能,以期实现全作战流程的隐蔽出航、成功突防、有效突击和安全返航。
3.3 协同飞行控制
在完成有人/无人机编队协同任务分配调度与航迹规划的基础上,要实现在真实作战环境中对飞行器平台的编队飞行控制,需要重点研究如何让异构多机编队对规划航迹进行稳定跟踪以及在协同战术展开时保持稳定的战术构型,这是无人机作战运用底层技术实现的重要一环。
3.3.1
真实作战环境中,风场变化情况十分复杂,存在定常风、切变风、随机风和梯度风等多种扰动形式,其对机群编队飞行控制的影响不可忽视。文献[60]运用粒子滤波的方式,对风场进行参数估计,实现风场模型的建立,其采用的对状态变量估计的方法可以较好地应用于非线性风场模型。后期,需要特别针对风场扰动,设计相应的飞控算法,以提高编队无人机跟踪控制系统的鲁棒性和控制精度。
此外,滑模变结构控制和动态逆控制在单机航迹跟踪中也有较多的应用:前者在求解复杂高阶控制问题上效果较好,但保守性大,易出现控制量饱和的问题;后者的系统模型受仿射非线性限制的影响小,在工程中应用较多,但受飞行器建模精度的影响较大,往往需要考虑抗扰动的问题。
3.3.2
有人/无人机编队队形控制作为编队飞行的基本保障和核心技术,在编队飞行过程中,它控制编队内各机保持期望队形的几何关系不变或在允许误差范围内变化。当前,在无人机、机器人、无人水下航潜器和航天器编队等应用领域均有较为成熟的编队控制方法,大致分为领航跟随法、基于行为法、虚拟结构法和一致性算法,有人/无人机编队保持控制问题,可以从这些领域汲取相关技术经验。
其中,领航跟随法比较符合当前的有人/无人机协同作战应用场景。有人机作为编队的指挥机充当长机角色,相应的,无人机作为僚机在扰动条件下对有人机进行稳定跟踪。该方法控制形式简单,有人机按照预先规划的航迹飞行,无人机与有人机之间的相对位置关系根据飞行航向设定后,就可实现对整个跟随编队的飞行控制,大大简化了控制过程。文献[70]基于领航跟随策略,设计了时变扰动下的动态反馈自适应有人/无人机编队队形保持控制器,其能够有效消除外界扰动对编队构型的影响;文献[71]通过滑模控制器(SMC)实现了leader 和follower 的队形保持,并使其均能稳定跟踪参考轨迹;文献[72]基于领航跟随的编队拓扑结构,设计了1 种具有容错机制的编队保持控制算法,可以对外界扰动、气动参数的不确定性和执行器故障进行补偿,从而实现鲁棒控制。
特别的,有人/无人机编队在出航和返航以及部分特殊任务场景下需要采取紧密编队的飞行方式:该飞行方式一方面可以提高僚机的升阻比,从而节省燃料;另一方面可以作为某种特定的协同样式以满足任务需求。如文献[74]中,采取多无人机紧密编队的方式进行,可以有效地随队支援干扰,以实现对敌雷达网的突防。与松散编队飞行不同的是,紧密编队飞行时,长机会在后方产生翼尖涡流,形成编队内部的气动耦合效应。为此,针对紧密编队,需要在气动耦合条件下设计更为精确、稳定的队形控制算法以保证编队的飞行安全。文献[76]针对空中自动加油的任务场景,对加油机的尾涡流场进行了精确仿真,并通过风扰动下的受油机动力学建模,分析出加油机尾涡对受油机动态特性的影响;文献[77]通过“在线”编队气动模型预测编队内部产生的气动耦合效应,并基于此,设计了鲁棒自适应编队控制算法。
综上分析可知,异构机群的飞行控制是连接航迹规划与航迹跟踪的“纽带”,对编队在实际战场环境中按照预定航迹飞行,实现既定的战法战术起到了底层支撑作用。为此,合理设计风场环境下有人/无人机编队飞行控制算法以及气动耦合效应下的编队队形保持控制算法,对于保证编队飞行安全,提升编队战斗力意义重大。
4 总结与展望
有人/无人机协同作战作为未来战争的发展方向之一,在学界和军事领域引起了广泛关注。本文从规划控制的角度对其关键技术发展进行了梳理和总结,可以看出,相关研究不断地在向作战运用聚焦,取得了众多理论技术成果,但距离真正的实战应用还存在如求解速度、动态适应和任务细节覆盖以及硬件支撑等方面的不足。随着计算机、人工智能、多智能体理论等在横向与纵向领域的快速发展,有人/无人机协同作战运用的相关技术和理论呈现出如下的发展趋势。
4.1 基于深度学习/强化学习的任务规划研究
通过3.1 节的分析可知,任务分配本质上来说属于经典的组合优化问题。近年来,众多学者利用深度学习和强化学习理论在组合优化问题上开展了一系列前沿探索性的研究工作,该方法在序列决策的求解上表现出极强的动态性和学习能力。在未来高烈度及对抗环境下的无人机作战需要开展实时性任务规划与决策控制,而深度学习与强化学习在这一方面具有极大的潜力,现阶段已有一些初步的研究成果。
4.2 基于群体智能的耦合问题一体化求解
有人/无人机协同作战运用的最终目标是实现每个作战平台“在正确时间到达正确地点执行正确任务”,这是1个高度耦合的多目标优化问题,需要异构多机之间展开信息层、任务层、载荷层的高效协同。传统的分层递阶思想将该问题解耦为多个并列的子问题,但是作战过程呈现的复杂系统特性使得这些问题相互嵌套,难以做到完全独立。智能化集群作战是未来战争的1 种发展趋势,可以借鉴社会化生物群体的集群行为,赋予单个作战平台一定的智能水平,并基于特定的交互规则与组织架构,实现群体智能涌现。该方法在求解难以进行细节抽象的耦合问题方面,具有天然优势并展现出自组织、自适应能力以及良好的规模扩展性,可以在作战过程中实现感知协同、任务协同和火力协同等问题的一体化求解。
4.3 基于作战视角的总体技术框架设计
当前,有人/无人机协同作战领域的技术研究更多的是着眼局部细节,对未来的作战运用价值难以形成体系效应。相反的,从作战视角出发,发挥先进作战概念对技术发展的牵引作用,可以实现从战争谋划到技术研发的良性闭环,掌握战争整体的先胜优势。为此,须进一步厘清有人/无人机协同作战能力建设需求,并以此为基础进行相关技术的整体框架设计。当前,“穿透型制空”“马赛克战”“信息机动”等作战概念催生出的“低-零功率”、跨域协同和智能决策等能力需求,为有人/无人机协同作战相关技术发展指明了方向。随着战争形态的不断演变,未来有人/无人机协同作战运用的技术发展更加需要向实战聚焦,以先进作战概念为牵引,将作战进程引入电磁环境和概率空间,融入成熟的战法战术,加强作战过程的动态对抗特性,并精细化设计异构多机之间的协同规则,不断增强交战过程的复杂性和不确定性,从而使敌方陷入态势认知和决策方面的困难,使我牢牢把握战争制胜优势。
