基于自适应视线法的无人机三维航迹跟踪方法
2022-10-14李辉龙腾孙景亮徐广通
李辉,龙腾,孙景亮,*,徐广通
1.北京理工大学 宇航学院,北京 100081 2.飞行器动力学与控制教育部重点实验室,北京 100081 3. 清华大学 精密仪器系,北京 100084
随着智能化和网络化技术的快速发展,无人机已广泛应用于应急救援、航空拍摄、交通管控、情报侦察、实时监控等军民领域。航迹跟踪技术是保证无人机任务执行能力的基础。
当前国内外对航迹跟踪的研究主要包括基于控制论和几何学的2类方法。在基于控制论的航迹跟踪方法中,线性控制方法结构简单,但面向考虑姿态控制的航迹跟踪非线性问题,跟踪精度较差;而非线性控制方法对模型精度要求较高,生成控制指令更复杂,工程实用有难度。
基于几何学的方法源自导弹制导律,通过在跟踪航迹上选取一个运动的虚拟目标,然后控制无人机趋向目标,实现航迹跟踪。其中,追踪法、视线法和非线性导引广泛应用于无人机航迹跟踪。针对视线法(Line-of-Sight, LOS)航迹跟踪任务,Fossen等设计了LOS导引律,由无人机偏离航迹的距离得到相对航向角指令,引导无人机趋近参考航迹。传统LOS航迹跟踪采用固定前视距离和固定接纳圆半径,其形式简单,但跟踪误差较大,收敛过程存在误差振荡。针对上述问题,文献[12-14]提出了以跟踪误差为参数的时变前视距离,虽然改善了收敛过程中的振荡行为,但收敛速度缓慢。随后,文献[15-16]提出了与航迹夹角成反比的自适应调整接纳圆半径。虽然上述方法的平均跟踪误差减小,但在航迹夹角较小的情况下,仍存在误差较大、收敛缓慢的问题。因此,开展能够使接纳圆和前视距离分别根据航迹段夹角和跟踪误差自适应调整的跟踪方法,对减小无人机航迹跟踪误差,提高收敛速度具有重要的意义。
针对LOS跟踪的参考航迹,文献[17-20]研究的参考航迹为直线和圆等特定几何航迹或光滑多项式曲线。但在工程应用中,面向任务需求,无人机需要规划并跟踪不规则的航迹,因此上述方法在工程应用中存在一定局限性。为进一步提升跟踪方法的工程实用性,文献[21-23]通过给定航迹点,引导无人机跟踪一系列由航迹点连接的航迹段,但跟踪精度和收敛速度等仍待进一步提升。因此,面向工程应用,本文以航迹点连接的航迹段为参考航迹,开展自适应跟踪方法研究,进一步降低航迹跟踪误差,提高跟踪收敛速度。
目前,无人机航迹跟踪方法通常仅考虑平面航迹跟踪,即假设无人机以稳定的高度飞行。但实际飞行过程中,无人机纵向运动和侧向运动之间的耦合作用导致平面航迹跟踪方法的跟踪精度和收敛速度均有所降低。此外,考虑任务环境中地形变化对无人机飞行高度的要求、复杂任务下无人机以特定角度完成打击任务、规避威胁障碍等任务需求,亟需开展无人机三维航迹跟踪方法研究,实现对三维航迹的准确跟踪。
因此,本文针对无人机三维航迹跟踪问题,提出了基于自适应视线法(Adaptive Line-of-Sight, ALOS)的三维航迹跟踪方法。考虑无人机机动性能约束和参考航迹信息,定制自适应接纳圆策略和自适应前视距离调整策略。将自适应接纳圆与前视距离策略引入视线法,提出ALOS跟踪方法。并构建无人机航迹跟踪误差方程,设计基于ALOS的状态反馈跟踪控制律,实现对三维航迹跟踪,降低航迹跟踪误差,提高跟踪收敛速度。最后通过数值仿真验证所提出方法的有效性。
1 问题描述
无人机航迹跟踪控制目标:设计跟踪控制律,使得跟踪误差=[,]满足:

图1 无人机航迹跟踪示意图Fig.1 Scenario of UAV 3D path following

(1)
进而实现无人机对参考航迹的准确跟踪。
无人机航迹跟踪采用多回路控制结构,包含外环跟踪控制和内环姿态控制(自动驾驶仪)。假设内环姿态控制自稳定,考虑外环航迹跟踪,三维空间内无人机的动力学模型为
(2)

||≤max, ||≤max
(3)
式中:max、max分别为无人机水平和铅垂方向最大加速度约束。
2 基于自适应视线法的跟踪控制律设计
2.1 视线法
LOS导引策略如图2所示。图中,={,,…,}为参考航迹;(,,)为航迹点坐标;-1为无人机当前跟踪航迹段。(,,)为无人机在时刻的位置;(,,)为无人机向参考航迹的投影点;(,,)为LOS的参考点位置;、分别为水平和铅垂方向的LOS角;为前视距离;0,为
图2 LOS航迹跟踪导引Fig.2 LOS-based path following guidance law
航迹点处接纳圆半径。
在航迹段-1上,可通过如下关系求得参考点的位置:

(4)
当无人机趋近于航迹点时,参考航迹段需要由-1切换到+1。当无人机与航迹点的距离满足如下关系:
|-|≤0,
(5)
无人机切换参考航迹段,转而跟踪下一段航迹。
传统基于LOS的航迹跟踪方法为经典视线法(Classical Line-of-Sight, CLOS),采用固定接纳圆和固定前视距离,实现对参考航迹的快速跟踪。但当参考航迹段进行切换时,固定接纳圆和前视距离将影响其跟踪误差和收敛速度。
考虑无人机最小转弯半径、飞行速度以及航迹段间夹角等因素对航迹跟踪性能的影响,为减小航迹跟踪误差,提高收敛速度,CLOS方法中接纳圆与前视距离有必要分别根据航迹段夹角和跟踪误差自适应调整,避免切换参考航迹时出现切换滞后或过早切换等现象,导致航迹跟踪误差增大,收敛速度变慢。因此,本文根据不同航迹段夹角,设置角度阈值,建立接纳圆半径与航迹段夹角的对应关系,定制随跟踪误差变化动态调整的前视距离策略,从而减少航迹跟踪误差,提高收敛速度。
调整原则如下:
当∈(0,π2)时,无人机以较大的接纳圆半径来调整航向和俯仰角,避免参考航迹段切换滞后导致的跟踪下一段航迹的误差增大;当∈(π2,π)时,需要较小的接纳圆半径来跟踪参考航迹,避免过早切换参考航迹导致对上一段航迹跟踪不完全。
在航迹跟踪过程中,跟踪误差=[,]不断变化,而参考点的选取取决于前视距离。较小的可以实现更快的收敛,但可能引起跟踪过程中的振荡;而较大的虽然可以消除振荡行为,但会导致收敛速度变慢。此外,在收敛过程中,随着跟踪误差减小,固定的前视距离会导致收敛速度逐渐变慢,难以保证跟踪误差的快速消除。
因此,本文充分考虑无人机机动性能约束和参考航迹信息,开展自适应接纳圆和自适应前视距离的研究,旨在进一步减少航迹跟踪误差,提升收敛速度。
2.2 自适应接纳圆策略
给定无人机最小转弯半径和航迹段夹角,无人机需要在点处切换航向(如图3所示),即参考航迹段由-1切换为+1。假设无人机在航迹点处的参考转弯半径为,则处的接纳圆半径0,=cot(2)。如果为了减小跟踪误差而设置参考转弯半径=,当航迹夹角∈(π2,π)时,随着的增大,会引起跟踪误差振荡。为缓解这一问题,设置角度阈值,根据航迹段夹角调整参考转弯半径和接纳圆半径。
考虑接纳圆半径0,与航迹段夹角之间的对应关系,设计自适应接纳圆为

∀0<≤π,=1,2,…,
(6)
式中:为无人机最小转弯半径;为参考航迹在航迹点处夹角;为比例系数。

图3 圆弧过渡法Fig.3 Transition arc method

2.3 自适应前视距离策略

(7)
式中:>0为考虑无人机机动性能所选取的一个常值;、分别为无人机靠近当前航迹时,前视距离的最小值和变化范围;、分别为无人机偏离当前航迹时,前视距离的最大值和变化范围;、为收敛率。
由式(7)所示自适应前视距离可得出:
将上述的自适应调整接纳圆和前视距离引入视线法,提出自适应视线(ALOS)航迹跟踪方法。在航迹跟踪过程中,ALOS根据跟踪误差分段设计自适应前视距离,并以跟踪误差为参数自适应调节前视距离,根据跟踪误差变化实时调整跟踪目标方向,通过控制律设计实现对目标方向的跟踪,从而引导无人机快速稳定趋近参考航迹。
2.4 基于状态反馈的跟踪控制律设计


图4 水平面内LOS跟踪控制示意图Fig.4 LOS path following in horizontal plane

图5 铅垂面内LOS跟踪控制示意图Fig.5 LOS path following in the vertical plane
水平面内跟踪误差=[,]表达式为

(8)
由式(8)可得跟踪误差的微分方程为
(9)
基于线性化假设和状态反馈方法,设计无人机的水平加速度指令为

(10)
式中:=cos为速度在水平面内分量。
铅垂面内跟踪误差=[,]表达式

(11)
由式(11)可得跟踪误差的微分方程为
(12)
同理,可得无人机的铅垂加速度指令为

(13)
故无人机三维航迹跟踪的控制指令为

(14)
此处,基于状态反馈设计的跟踪控制律(10)和(13),可通过极点配置方法选取反馈增益矩阵=[,,],从而保证跟踪闭环系统的稳定性。在极点配置中,通过设计系统期待阻尼比和调节时间,从而避免误差曲线出现振荡,并且能快速收敛。
以水平面内跟踪误差为例,证明跟踪控制系统的稳定性。线性误差系统为

(15)
式中:状态矩阵和输入矩阵分别为
(16)
基于状态反馈设计控制量为
=-
(17)
式中:为反馈增益矩阵。
故系统闭环方程为

(18)
上述闭环系统特征多项式为

(19)
在极点配置中,通过设计系统期待阻尼比和调节时间,取、为具有负实部共轭复根。由于闭环系统特征根、严格位于左半平面,则对应的系统是稳定的,因此保证跟踪闭环系统的稳定性。
3 仿真实验与分析
通过仿真试验,验证自适应接纳圆策略和自适应前视距离策略对提升航迹跟踪性能的效果,并与非线性导引法进行对比研究,验证本文航迹跟踪方法的性能优势。

基于CLOS,引入自适应接纳圆策略,设计基于自适应接纳圆的视线法(Adaptive-Acceptance-Circle-based Line-of-Sight, AAC-LOS),基于CLOS、AAC-LOS和本文所提ALOS进行对比研究,验证自适应接纳圆和前视距离策略对提升航迹跟踪性能的效果。其中,固定接纳圆半径=;自适应接纳圆采取如式(6)所示接纳圆半径。固定前视距离=50 m;自适应前视距离采取如式(7)所示的前视距离,其中收敛率=1/5,=1/50,=10 m,=20 m,=80 m,=50 m。反馈增益矩阵=[,,] =[0.4, 0.01, 0.2]。
基于几何学的跟踪方法中,相较于视线法,非线性导引法(NonLinear Guidance Law, NLGL)在无人机跟踪领域应用最广。面向三维航迹跟踪的任务需求,从工程应用的角度出发,选择文献[24]的非线性导引律进行对比。根据无人机的实际飞行位置和参考航迹信息,假设无人机当前位置为,由引导长度得到参考航迹点,令=,加速度指令根据式(20)计算。
(20)

无人机三维航迹跟踪轨迹和误差如图6所示。图6(a)~图6(c)中,航迹点1~4为无人机爬升到指定高度的过程,航迹点5~9为无人机在指定高度执行探测任务的过程。由图可知,不同跟踪方法下无人机均可以实现对参考航迹的跟踪。图6(d)为无人机实时位置与投影点之间的水平和高度方向的跟踪误差=[,]随时间变化曲线,图中误差曲线突变处对应参考航迹切换的时刻。
图6 无人机三维航迹跟踪结果Fig.6 UAV 3D path following results
为进一步说明自适应接纳圆策略对提升视线法航迹跟踪精度的效果,基于CLOS和AAC-LOS进行对比研究。在固定前视距离的基础上,对比固定接纳圆和自适应调整接纳圆策略下的视线法航迹跟踪结果,在70~78 s和185~191 s时无人机跟踪轨迹水平投影和水平跟踪误差曲线的局部细节如图7所示。图7(a)和图7(b)对应无人机在时间为70~78 s时的跟踪结果,图中航迹点处的夹角>π2。由图可以看出相比于固定接纳圆下的跟踪轨迹,基于自适应接纳圆的轨迹更接近参考航迹,最大跟踪误差从40 m降低至20 m,跟踪误差更小。图7(c)和图7(d)对应无人机在时间为185~191 s时的跟踪结果,图中航迹点处的夹角<π2。由图可以看出,基于自适应接纳圆的跟踪轨迹因接纳圆半径变大而提前切换参考航迹段,并快速收敛至下一段参考航迹,收敛过程耗时为2.7 s(从186.3 s 时切换参考航迹到189 s时收敛至参考航迹),相较于固定接纳圆收敛耗时的5.3 s,耗时降低约2.6 s。需要说明的是,在图7(d)中自适应接纳圆轨迹的跟踪误差增大是因为误差统计也提前切换至下一航迹,但实际跟踪轨迹更接近参考航迹。因此,自适应接纳圆策略有效改善了固定接纳圆导致的切换参考航迹滞后和过早切换参考航迹的问题,减小了航迹跟踪误差,有效提升了跟踪精度。
图7 不同接纳圆策略下三维航迹跟踪结果Fig.7 Results of 3D path following of UAV using different forward sight distance strategies
为进一步说明前视距离自适应调整策略对提升视线法航迹跟踪收敛速度的效果,基于AAC-LOS和ALOS进行对比研究。在自适应接纳圆的基础上,对比固定前视距离和自适应前视距离策略下视线法航迹跟踪结果,在144~150 s时无人机跟踪轨迹水平投影和跟踪误差曲线的局部细节如图8所示,可以看出,2种策略下无人机均在141 s时切换参考航迹段,但在自适应前视距离策略下,在144 s时无人机跟踪轨迹收敛至参考航迹,较固定策略提前约5 s,并且航迹跟踪误差更小。自适应前视距离策略能够改善固定前视距离下航迹跟踪误差大、收敛速度缓慢的问题,实现快速稳定的航迹跟踪。
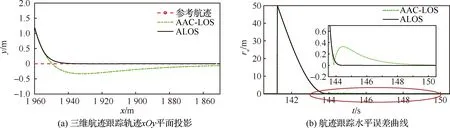
图8 不同前视距离策略下三维航迹跟踪结果Fig.8 Results of 3D path following of UAV using different forward sight distance strategies
为进一步说明本文航迹跟踪方法的性能优势,基于ALOS和NLGL进行对比研究,在110~118 s时无人机跟踪轨迹水平投影和水平跟踪误差曲线的局部细节如图9所示。由图可以看出,2种方法在航迹点处切换参考航迹的起始时刻约为109 s,基于ALOS的跟踪轨迹在112 s时便收敛至参考航迹,而NLGL则在116 s时收敛,ALOS在航迹点3处从切换参考航迹到收敛的耗时小于NLGL。相较于NLGL,基于ALOS的跟踪轨迹更快接近参考航迹,跟踪误差也小于NLGL,在航迹跟踪性能方面更具优势。
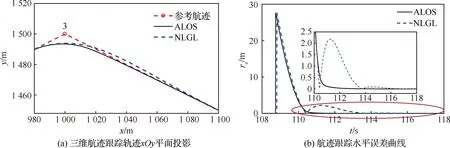
图9 不同跟踪控制方法下三维航迹跟踪结果Fig.9 Results of 3D path following of UAV based on different guidance law
综上,基于ALOS的三维航迹跟踪方法能够基于相邻航迹段间夹角和无人机机动性能约束,自适应调整接纳圆半径大小,引导无人机切换参考航迹并减小跟踪误差;能够根据实时的跟踪误差(水平和高度误差)自适应调整前视距离,引导无人机跟踪并快速收敛至参考航迹。基于ALOS的三维航迹跟踪方法能够实现快速、准确、稳定的航迹跟踪,具有良好的跟踪性能。
4 结 论
本文对无人机三维航迹跟踪控制问题进行了研究,提出了基于ALOS的航迹跟踪策略,并开展数值仿真试验,得到了如下结论:
1) 自适应接纳圆策略能够有效改善固定接纳圆导致的切换参考航迹滞后和过早切换参考航迹的问题,充分跟踪参考航迹并减小跟踪误差。
2) 自适应前视距离策略能够改善固定前视距离下航迹跟踪误差大、收敛速度缓慢的问题,实现快速、稳定、准确的航迹跟踪。
3) 与NLGL的对比试验表明,基于ALOS的状态反馈航迹跟踪控制方法能够满足收敛性、可靠性和准确性的跟踪要求,在跟踪精度、收敛速度等方面具有优势。