基于OBD远程监测数据的高排放柴油车筛选方法研究
2022-08-04程晓章邢晓通刘长波
程晓章, 王 浩, 邢晓通, 钱 赛, 刘长波
(合肥工业大学 汽车与交通工程学院,安徽 合肥 230009)
0 引 言
随着排放标准的不断严格控制,新车的排放控制已经取得了一定成效,但对在用车实际运行过程中排放情况的研究发现,机动车实际运行过程与实验室排放测试有着明显差别,因此机动车的实际道路排放水平是近年来世界各国研究的重点[1]。近年来越来越多的研究人员意识到,改善城市空气污染状况和减少机动车能源消耗,需要对机动车尾气排放和油耗进行综合管控。车载诊断系统(on-board diagnostics,OBD)通过实时监测发动机、催化转化器、颗粒捕集器、氧传感器、排放控制系统、燃油系统等系统和部件,可以实时监测车辆运行状态。早期,OBD-I只是简单监测排放相关部件的电路是否存在故障,到了OBD-II后,车辆部件电路信号的合理性被纳入诊断范围,实现了从发动机的运行状况随时监测汽车是否尾气超标[2]。
随着我国排放法规进入国六排放实施阶段,OBD监测功能越来越受到重视,并对OBD的检测项目、阈值及检测条件等技术要求进行了修订。相较于国五,国六OBD系统有几个特点:监控部件增多、监控范围拓展、监控功能更完善[3]。从现行排放政策来看,机动车污染排放控制的重点已由实验室台架测试转向实际运行监管,正逐渐形成全方位、多种测试技术联合的机动车排放实时监测网络[4],因此快速、准确、高效地获取并分析机动车在实际道路运行工况下排放水平是目前国内外研究的重点,也是制定科学有效的机动车污染控制措施的基础。目前,国内外对利用车载数据采集终端进行实时排放监测开展了大量的理论和实验研究。文献[5]说明了便携式排放物测量系统(portable emission measurement system,PEMS)测试的局限性,虽然进行了道路排放测试,但其行驶工况与实际车辆行驶工况仍存在一定的差别;文献[6]为探究驾驶行为对重型柴油车实际行驶污染物排放的影响,利用PEMS对3辆车分别进行了平稳驾驶、正常驾驶和激烈驾驶共9次试验。对每辆车前后3次试验的市区、市郊、高速路段和总行程路段动力学参数和比排放进行了计算,证明了驾驶行为对车辆排放的影响不容忽视;文献[7]利用4辆轻型汽油车进行试验研究,通过CO2移动平均窗口法和欧Ⅵ新方法进行排放计算,结果表明相对正向加速度与微小颗粒物排放成正相关,与CO、NOx排放相关性不明显;速度与正向加速度乘积按升序排序的第95个百分位取值与CO、PN排放成正相关,与NOx排放成负相关,与CO和PN的相关系数大于与NOx的相关系数;文献[8]利用PEMS设备对轻型汽油车进行多次实际道路排放测试,使用移动平均窗口法处理车辆实际行驶污染物排放(real drive emisson,RDE) 测试结果,对不同驾驶行为下的RDE测试结果进行对比,评估不同驾驶行为对车辆排放结果的影响。
目前国内已有多个地区出台环保政策,要求国四及以上柴油车加装具有车载远程通讯终端进行数据实时采集和传输,北京市已率先建立北京市重型汽车排放在线监控平台。利用OBD进行实际道路排放测试和排放监管是治理在用车排放污染的有效措施,也是今后在用车排放监管的重要发展方向之一。但是在众多理论及实验研究中,少见有通过OBD采集数据对车辆行驶工况进行分析、对高排放车辆进行筛选的相关研究。[9]
1 远程监测系统架构
车载远程监测系统由车载数据采集终端(采样频率为1 Hz)和数据管理平台2个部分组成[10],远程监测终端架构如图1所示。在现有OBD控制器局域网络(controller area network,CAN)接口集成无线通讯模块和全球定位系统(global positioning system,GPS)模块,读取车辆与发动机电子控制单元(electronic control unit,ECU)数据[11],并可以集成NOx传感器、排气温度传感器、环境湿度传感器等外部传感器。读取数据包括车速、发动机转速、发动机负荷、发动机瞬时油耗、加速踏板开度、大气压力、进气温度、进气压力、发动机水温、排气系统温度、选择性催化还原转化器(selective catalytic reduction,SCR)上下游NOx浓度等。

图1 远程监测终端架构
本文对200辆重型柴油车进行了连续10 d的行驶数据采集,数据通过无线网络上传至数据库中的存储服务器,数据库及远程监测终端由中国汽车技术研究中心开发,通过终端电脑调取和下载数据库中的相关内容。本文调取该200 辆重型柴油车的试验数据,这些数据被汇集成原始行驶数据库用于后续处理运算。
2 数据处理
在数据处理中,利用MATLAB软件编程进行数据清洗、处理和分析。
2.1 计算NOx排放、SCR去除效率
通过采集到的发动机净输出扭矩、发动机转速、进气量、发动机燃料流量及SCR上(下)游NOx传感器输出值,利用MATLAB软件计算得到上(下)游NOx排放、发动机功率及SCR去除效率。
2.2 异常值处理
删除所得数据中发动机转速、功率、速度、发动机燃料流量及SCR上(下)游NOx传感器输出值中无数据的异常值。
满足以下异常情况的任一项时,删除此异常值:
(1) 发动机转速小于等于0。
(2) SCR上下游NOx传感器输出值大于等于3 000 mg/m3。
(3) SCR上下游NOx传感器输出值小于0。
(4) 发动机功率小于等于0。
(5) 速度小于0。
(6) 发动机燃料流量小于0。
2.3 对NOx传感器输出异常值进行平滑
对SCR下游NOx传感器输出值中相邻数据作差得δi。当δi大于定值δ1(取δ1为600 mg/m3)时,认为数据变化剧烈,采用Di+1与Di-1进行平滑处理。
作差计算公式为:
δi=Di-Di-1
(1)
平滑计算公式为:
(2)
2.4 SCR去除效率中的异常值处理
当SCR效率大于100%时,替换为100%;当SCR效率小于0%时,替换为0%。
2.5 排放量计算
瞬时排放量e的计算公式为:
(3)
其中:κ为充气效率;D为发动机排量;ω为发动机转速;T为进气温度;p为进气压力;Rfuel为燃油消耗率;CNOx为NOx体积分数。
累计排放量E的计算公式为:
(4)
其中:t0为片段开始时刻;tn为片段结束时刻。
2.6 加速度参数计算
因为OBD数据在传输过程中产生数据丢失现象,会造成采集时间间隔并非完全一致[12],所以将相邻数据的采集时间作差得δt。δt与OBD设定的采集时间间隔(1 s)一致时,计算行驶加速度a;与设定时间间隔不一致时,则认定Dt为时间断点,无加速度值;迭代计算所有的加速度a,剔除空值。
计算δt及加速度的表达式如下:
δt=Dt+1-Dt
(5)
(6)
其中:δt为采集时间差值;Dt为第t个数据的采集时间值;Dt+1为第t+1个数据的采集时间值;a为加速度值。
3 速度、加速度对NOx排放的影响
行驶工况中车速、加速度对于汽车的燃料消耗和污染物排放有着重要的影响[15],因此对这2个参数进行分析对于工况选择至关重要。
3.1 速度与排放的关系
车辆行驶速度与NOx排放速率的关系如图2所示。NOx的排放率集中在0~0.3 g/s范围内,速度集中在0~80 km/h范围内。
从图2可以看出:在速度一定的情况下,NOx排放率分布很广,表明影响NOx排放的还有其他行驶参数;而在NOx排放率一定时,速度分布于0~80 km/h 内不同值,表明在不同速度下NOx排放率基本保持一致,这可能与车辆发动机工作状况有关。

图2 车辆行驶速度与NOx排放速率
3.2 加速度与排放的关系
车辆行驶加速度与NOx排放率的关系如图3所示。
从图3可以看出:加速度集中分布在-4~5 m2/s附近;在加速度一定的情况下,NOx排放率呈现分散分布;而在NOx排放率一定时,加速度对应值有较大跨度,说明在不同加速度下,NOx排放率可取得相同值。

图3 加速度与NOx排放率的关系
4 工况划分
通过以上分析可得,工况参数中车辆速度和加速度均会对车辆NOx排放产生较大影响,因此要分析车辆实际的排放状况,必须结合车辆行驶工况进行讨论[14]。
4.1 速度参数划分
对车辆数据中的速度值进行分析,得到车辆速度分布如图4所示。车辆行驶速度集中在0~20 km/h、30~40 km/h、50~70 km/h 和70~80 km/h,分别占车况总数的29.5%、12.3%、14.5%、15.4%。其中:0~20 km/h的速度占比较大,说明车辆多在城市内部运行;其次占比较大的是70~80 km/h,这与城市高架路段的高速公路段限制车速一致。因此选取这4段速度区间进行分析。

图4 车辆速度分布
4.2 加速度参数划分
将所有车辆速度数据导入MATLAB程序,计算后得到车辆加速度的分布如图5所示。
从图5可以看出,由于怠速或匀速行驶状态的行驶数据较多,加速度为0 m/s2的占比达到了28%,加速度呈现正态分布。
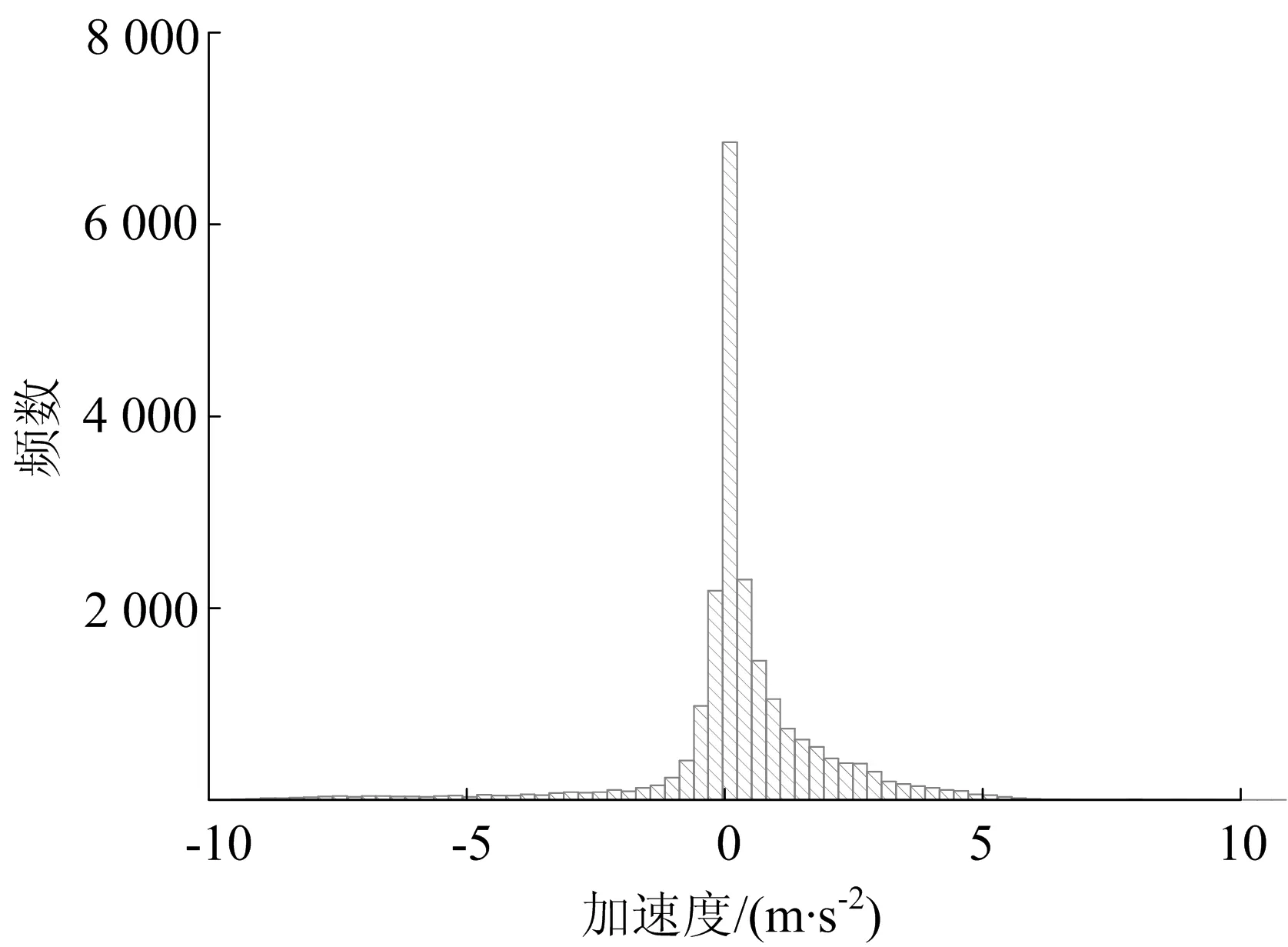
图5 车辆加速度分布
加速度范围与数据量的关系见表1所列。
从表1可以看出,加速度范围在-4~4 m/s2时,数据量为22 043条,占总加速度数据量的97.33%,因此选取此限值作为加速度范围。
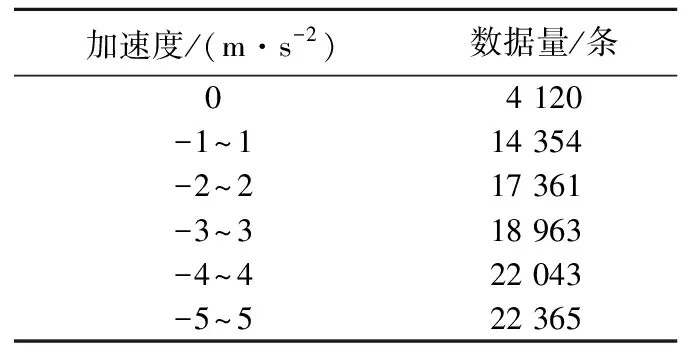
表1 加速度范围与数据量的关系
5 结果分析
对于不同工况的车辆排放限值确定及超限车辆的筛选流程如图6所示。
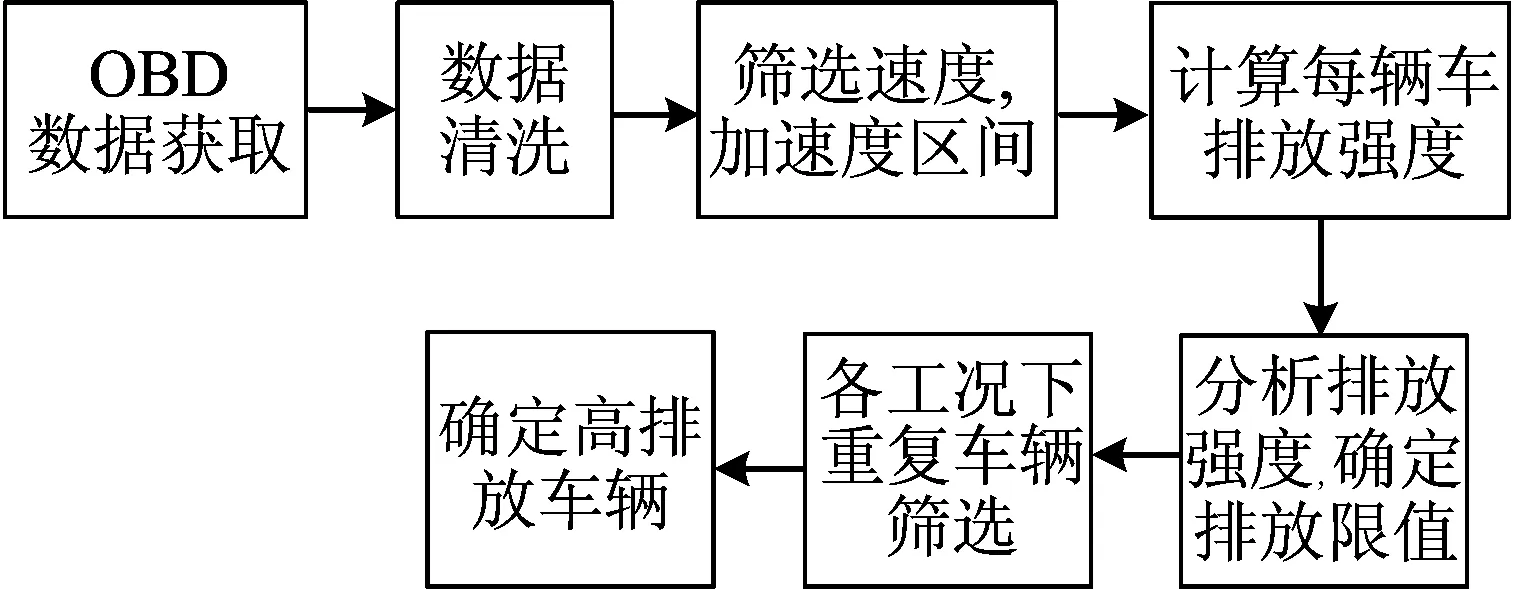
图6 车辆排放限值确定及超限车辆的筛选流程
所有车辆数据合为一组为对照组,即TC0。剔除所有车辆数据中超出加速度-4~4 m2/s的数据,将剩余数据分为0~20 km/h、30~40 km/h、50~70 km/h和70~80 km/h 4组,即为TC1、TC2、TC3、TC4。
5.1 不同工况下平均排放强度分布特征
计算行驶工况TC0、TC1、TC2、TC3、TC4下的排放强度为I0、I1、I2、I3、I4,排放强度计算公式如下:
(7)
其中:I为机动车排放强度;G为SCR下游NOx排放速率;P为发动机功率值。
对排放强度取对数使其转化为正态分布L,L表示为L0、L1、L2、L3、L4。依据统计学原理,标准差可以表示数据的离散程度,与均值结合可以表示一定的数据范围,因此依据均值及标准差判定限值。分别计算了L的均值为μ0、μ1、μ2、μ3、μ4及标准差为σ0、σ1、σ2、σ3、σ4。取μ+2σ作为限值,其对应的排放强度I即为排放强度限值。根据不同的排放限值识别不同工况下的高排放车辆。
均值及标准差计算公式如下:
(8)
(9)
其中:μ为均值;σ为标准差;Lgi为在L中第i辆车排放强度的对数值;n为在L中共有的车辆数,不同速度区间下车辆的排放强度及排放限值如图7所示。

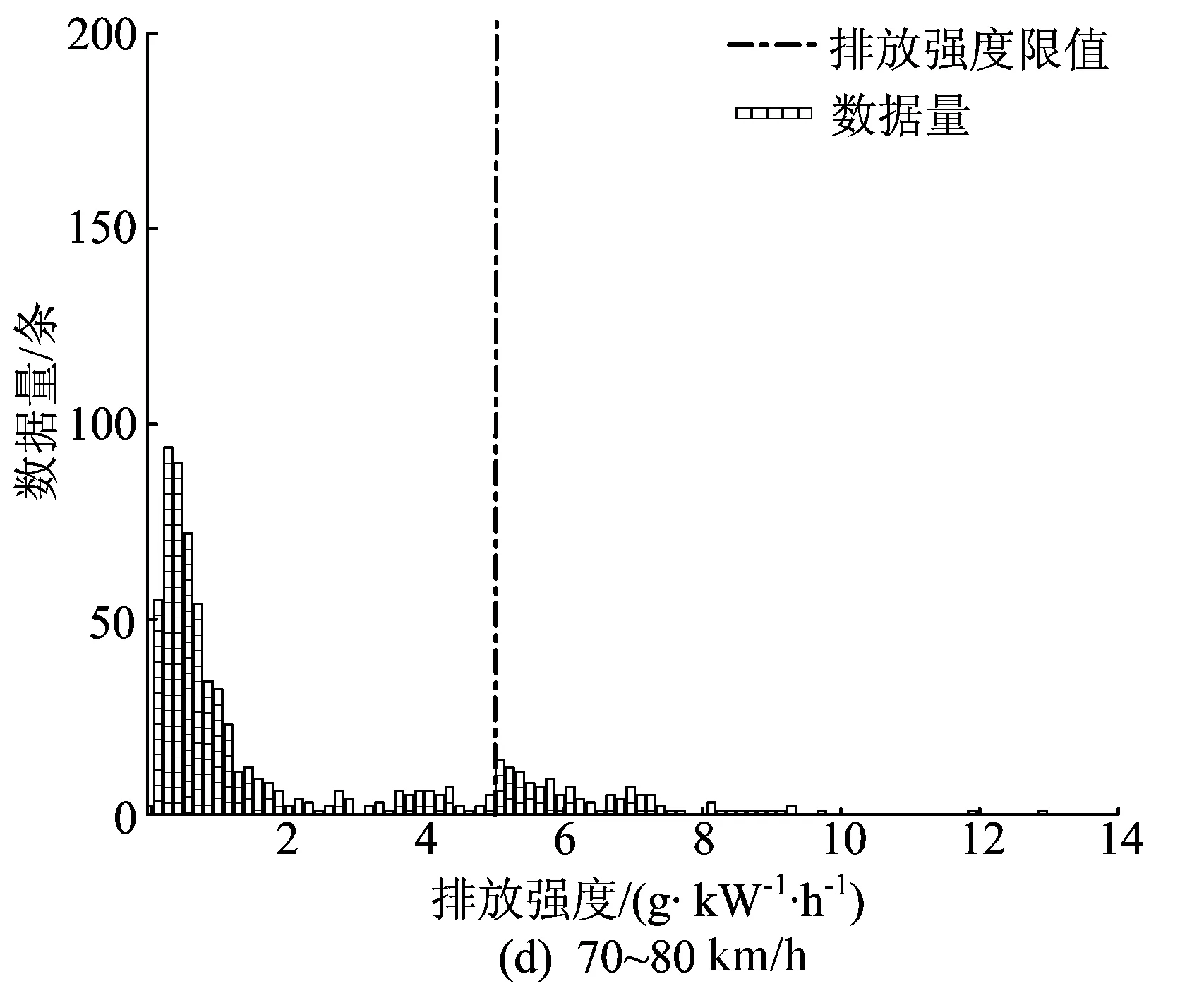
图7 不同速度区间下车辆的排放强度及排放限值
车辆排放强度均呈现正偏态分布。不同工况条件下车辆NOx排放强度较为集中,均分布在0~2 g/(kW·h),分别占到了总数的93.8%、81.6%、85.5%、86.4%。这表明多数车辆的排放强度较低,在不区分加速度和速度的条件下,NOx排放强度的均值为1.28 g/(kW·h),NOx排放限值为4.06 g/(kW·h)。
对于各个工况区间来说,加速度在-4~4 m2/s内。由图7a可知,速度为0~20 km/h的工况TC1中,排放强度均值为0.73 g/(kW·h),79.8 %车辆的排放强度均小于1 g/(kW·h);由图7b可知,速度为30~40 km/h的工况TC2中,排放强度均值为1.25 g/(kW·h),其中68.2%车辆的排放强度低于1 g/(kW·h),表明中低速条件下的车辆排放强度均较低;由图7c可知,速度为50~70 km/h的工况TC3中,排放强度均值为1.36 g/(kW·h),其中排放强度大于6 g/(kW·h)的车辆数占到3.5%;由图7d可知,在速度为70~80 km/h的工况TC4中,排放强度最高值达到12.9 g/(kW·h),排放强度大于6 g/(kW·h)的车辆数占到3.7%,说明在中高速条件下,出现高排放强度车辆的比例较高。正是因为排放强度的统计特征如上所述,所以得到的不同行驶工况TC1、TC2、TC3、TC4下对应的排放限值分别为2.40、4.08、4.83、5.08 g/(kW·h),排放限值随着速度的提高而提高。
5.2 高排放车辆筛选工况选择
各个工况筛出的超限值车辆中,重复率越高的车辆说明其高排放的可能性越大,各个工况中车辆重复率有所不同,重复率越高说明该工况对于高排放车辆的筛选越有效。
依据车牌号将TC1中筛选出的超限值车辆集合与TC2中筛选出的超限值车辆集合作对比,提取出相同车牌号的车辆,计算相同车辆在TC1中所占比例,对其他工况筛选出的超限值车辆集合重复以上步骤,得到关于TC1工况的所有比例集合,最后计算TC1工况的比例平均值,即为该工况下高排放车辆筛选成功率。
依据上述方法计算出TC1、TC2、TC3、TC4,各工况车辆重复率分别为48.33%、61.35%、59.22%、68.43%。所有工况中,TC1的筛选成功率最低;TC2和TC3筛选成功率较为接近,在60 %左右;成功率最高的工况为TC4,占到68.43%,说明TC4工况筛选出的超限值车辆重复率最高,筛选成功率最高。
6 结 论
(1) 本文通过采集的车辆数据分析处理,对影响车辆NOx排放的工况因素进行筛选,结果表明,车辆NOx的排放率集中在0~0.3 g/s范围内,速度集中在0~80 km/h范围内,加速度集中分布在-4~5 m/s2区间内。车辆NOx排放受车辆速度和加速度的双重影响。
(2) 通过计算行驶工况TC1、TC2、TC3、TC4下的排放强度,运用统计学原理,通过各行驶工况排放强度标准差及均值的结合,得出各行驶工况下的排放强度限值。排放限值与车辆行驶速度成正比。
(3) 对各行驶工况中重复车辆的筛选结果表明:TC1的筛选成功率最低,为48.33%;TC2和TC3筛选成功率较为接近,在60 %左右;成功率最高的工况为TC4,占到了68.43 %。说明TC4工况中筛选出的超限值车辆重复率最高,高排放车辆筛选成功率最高。
