无人机倾斜摄影测量在房地一体化测量中的应用
2022-07-25何高林常科家
何高林 常科家 陈 杰
(湖南湘测科技工程有限公司,湖南 长沙 410006)
无人机倾斜摄影测量技术是依赖在无人驾驶飞机上搭载图像传感元件或者专业的测量器件,获取地表建筑物或者地形的影像,并采用专业软件提取影像信息用于建立三维立体模型,实现测量成果解译的目的[1]。它可以实现快速、高精度和低成本地完成大范围、大起伏地形的测量,因此在地质灾害监测、地形图测绘、考古等领域中得到广泛的应用,将其应用于房产一体化测量具有明显优势[2]。
1 基于Harrishe 算子和SIFT 算法的无人机倾斜摄影图像特征提取
Harris 算子是在信号处理技术发展起来的数学算法,它利用了信号的自相关原理进行信息提纯,可以有效避免信息提取过程中噪声信号的影响[3-5]。无人机倾斜摄影图片可以认为是一个二维的像素信号,在像素信号内确定一个特定大小(尺度)的信号窗口,在窗口内对数字信号进行求水平方向的梯度lx 和竖直方向的梯度ly,形成梯度矩阵M如公式(1)所示

利用高斯卷积模板G 可以实现对矩阵窗口内的信号进行滤波,高斯卷积的计算方法如公式(2)所示
式中,x 是影像水平方向像素坐标,y 是影像垂直方向像素坐标,⊗为卷积符号,σ 矩形窗口尺度因子。
SHIF 算法是在Harris 算子的基础上进一步改进,克服了后者在尺度变换影响特征上具有尺度变化性的缺点[6]。从公式(2)中可以看出,在Harris 算子中的高斯卷积模板含有矩形窗口的尺度因子σ,相应地,在SHIF 算法也可以通过构建高斯函数G(x,y,σ)来获取不同尺度空间图像信息L(x,y,σ),以保证图像尺度变化的不变性,计算方法如公式(3)所示
式中,I(x,y)为图像。
2 无人机倾斜摄影方案及工作处理流程
2.1 无人机倾斜摄影方案
在房地一体化测量中,对测量的精度较高,测量的范围也较大,对测量的工作量要求较大,需要测量房屋角点的平面坐标、获取地界址点坐标以及绘制平面地籍图等。利用无人机倾斜摄影测量在房地一体化测量时,影响测绘成果精度之一便是像控点的布置方式和数量确定。本文以湖南省长沙市某村镇房地一体化测量为例,待测区域为1km2,区域内房屋以砖混和钢混为主,地形整体较为平坦,地表植被分布一般,设了4 种不同的像控点布设工况,如图1 所示。在工况1 条件下,像控点在待测区域范围内均匀布置;在工况2 条件下,像控点在待测区域角点进行布置,且布置方式为点组,待测区域边界中部和内部无像控点;在工况3 条件下,像控点布置数量与工况2 相比,有进一步的增加,除了在角点位置以点组方式布置像控点外,还在待测区域边界中部沿边线均匀布置像控点;在工况4 条件下,像控点布置数量在工况3 条件下进一步增加,在待测区域内部也布置点组像控点。

图1 无人机倾斜摄影测量相控布置工况
无人机摄影测量设备为中海达多旋翼智能航测无人机,具备旋翼数量为6 翅,桨叶类型为全碳纤折叠桨,起飞和降落方式为垂直起降,能够实现POS 辅助自动导航,无人机设备的轴距为1200mm,典型的飞行高度达到60m~750m,最大飞行高度为4500m,典型的巡航速度不超过10s-1,典型的地面采用距离为1.6cm~20cm,太阳高度角不小于30°,阴影倍数小于2 倍。
2.2 无人机倾斜摄影工作处理流程
房地一体化测量的无人机倾斜摄影工作流程如图2所示,首先对选取合理的像控点布置方案,在测区内进行像控点进行布置,其次对测区进行飞行方案设计,确定飞行平台和飞行航线,随后对采集的无人机倾斜摄影图像进行数据处理和解译,对图像的特征进行提取以及数据滤波等,最后绘制房屋一体地籍图。在所有的工况中,工况选定20 个测点作为检测点,以检测测量效果。

图2 基于无人机倾斜摄影测量技术的房地一体化测量流程
在无人机倾斜摄影测量数据处理时,对图像的尺度空间进行高斯差分空间构建,即将尺度空间以高斯金字塔分层的方式,将其划分为n 个父层级,每个父层级又包含n 个子层级,每个子层级进一步细分为σ 层,如图3 所示。每个父层级在尺度空间内进行高斯滤波,滤波尺度如公式(4)所示,滤波后的图像进行重新采样形成新的图像,并再次重复进行高斯滤波,直至满足要求位为止[7-8]。

式中,o 为图3a 中图像尺度空间高斯金字塔的父层级数,s 为图1a 中子层级的第几层数,其余子层级的高斯滤波尺度如公式(5)~公式(7)所示。
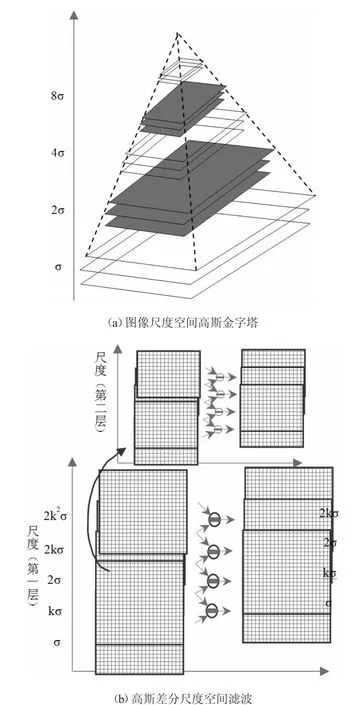
图3 图像高斯差分尺度空间分层及高斯滤波

式中,k 为相邻子层级的尺度缩放因子,k=21/s。
3 基于无人机倾斜摄影的房地一体化测量成果分析
图4 为待测区域20 个测点检测点的无人机倾斜摄影测量x 坐标误差δx曲线。从图中可以看出,在同一工况下,不同检查点的x 坐标误差δx呈现不同程度的波动,且各个工况的x 坐标误差值δx波动互相分离。工况1 的x 坐标误差范围为0.04~0.05,平均值δx,ave为0.05;工况2 的x 坐标误差范围为0.05~0.10,平均值δx,ave为0.07;工况3 的x 坐标误差范围为0.04~0.07,平均值δx,ave为0.06;工况4 的x 坐标误差范围为0.04~0.06,平均值δx,ave为0.05。由此可知,在工况2 条件下,像控点在待测区域角点进行布置,且布置方式为点组,待测区域边界中部和内部无像控点,它得到的x 坐标误差最大,工况3 条件下,在待测区域边界中部沿边线均匀增加布置像控点,其得到的x 坐标误差次之,而工况1 和工况4 条件下,得到的x 坐标误差最小,且两者相近。在实际无人机倾斜摄影中,工况1 像控点在待测区域范围内均匀布置,布点量大,测量工作大,因此可以采用工况4 的像控点布置方案,达到减小布点量且满足测绘精度要求。
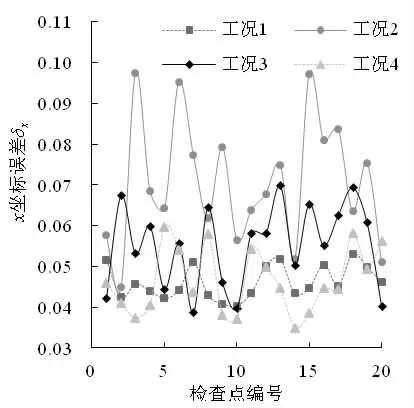
图4 待测区域无人机倾斜摄影测量检测点x 坐标误差
图5 为待测区域20 个测点检测点的无人机倾斜摄影测量y 坐标误差δy。从图中可以看出,在同一工况下,不同检查点的y 坐标误差呈现不同程度的波动,且各个工况的y 坐标误差值δy波动互相分离。工况1 的y 坐标误差范围为0.03~0.05,平均值δy,ave为0.05;工况2 的y 坐标误差范围为0.05~0.09,平均值δy,ave为0.07;工况3 的y 坐标误差范围为0.04~ 0.07,平均值δy,ave为0.05;工况4 的y 坐标误差范围为0.04~0.06,平均值δy,ave为0.05。由此可知,4 种不同工况的无人机倾斜摄影测量y坐标误差结果与x 坐标误差结果基本一致。

图5 待测区域无人机倾斜摄影测量检测点y 坐标误差
图6 为待测区域20 个测点检测点的无人机倾斜摄影测量点位置误差δxy,其误差计算方法如(8)所示。从图中可以看出,在同一工况下,不同检查点的点位误差δxy呈现不同程度的波动,且各个工况的点位误差δxy值波动互相分离。工况1 的点位误差范围为0.05~0.07,平均值δxy,ave为0.06;工况2 的点位误差范围为0.07~0.12,平均值δxy,ave为0.10;工况3 的点位误差范围为0.06~0.09,平均值δxy,ave为0.08;工况4 的点位误差范围为0.05~0.08,平均值δxy,ave为0.07。由此可知,在工况2 条件下,像控点在待测区域角点进行布置,且布置方式为点组,待测区域边界中部和内部无像控点,它得到的点位误差最大,工况3 条件下,在待测区域边界中部沿边线均匀增加布置像控点,其得到的点位误差次之,而工况1 和工况4 条件下,得到的点位误差最小,且两者相近。

图6 待测区域无人机倾斜摄影测量检测点点位误差

4 结论
以湖南省长沙市某村镇房地一体化测量为例,布置4 种不同的像控点布置方案进行测量,得到以下几个结论:
4.1 x 坐标误差δx、y 坐标误差δy、点位误差δxy计算结果为工况2 条件下得到的误差最大,工况3 条件下的误差次之,而工况1 和工况4 条件下,得到的位误差最小,且两者相近。
4.2 在实际无人机倾斜摄影中,工况1 像控点在待测区域范围内均匀布置,布点量大,测量工作大,因此可以采用工况4 的像控点布置方案,达到减小布点量且满足测绘精度要求。
