一种基于物联网技术的智能草方格铺设车的设计
2022-07-25喻继杨张培琦刘彦君
喻继杨 张培琦 刘彦君
(重庆交通大学机电与车辆工程学院,重庆 400074)
目前,沙漠化治理方式可分为生物防治、封育修复和工程防治等[1]。生物防治是采用种植植被,涵固沙土的措施,而封育修复则是针对具有一定自我修复能力的区域实行封闭保护。以上措施均是以植被生长为前提,但沙漠表层沙土流动性大,植被根系难固定,则需采用防风固沙措施,为植被根系生长提供条件[2]。现有草风格铺设装置存在工作效率低,智能化程度低,人员工作环境恶劣等问题。而本文探索性地设计了一种可适用于不同沙漠工况下的智能草风格铺设车,可有效解决上述问题,智能高效地完成铺设作业。
1 总体设计方案
本设计是以单片机为控制系统,以物联网作为传输结构,集自动铺草和辅助监测于一体的全自动沙漠治理装置。铺设车是由机械系统和控制系统组成,可实现整车行进、草带输送、草带剪切和草带滚轧;控制系统主要功能:一是构建控制端和执行端的信息传输通路;二是以智能化算法为基础操作机械结构完成给定的工作任务。可实现远程控制、环境监测、自主运行和最优铺设路径规划。铺设车系统组成框图如图1 所示。

图1 铺设车系统组成框图
2 主要机械机构及其原理
工作时,整车向前行进,草带从存储室到下方通道经输草机构平铺到工作面上,轧草机构降下滚刀,持续将草带滚轧入沙土,完成铺设。结束时,由断草机构切断草带,再抬升滚刀。铺设车三维模型图如图2 所示。

图2 铺设车三维模型图
2.1 行进机构
行进机构用于承载整车重量、控制小车行进和转向。行进机构结构图如图3 所示。

图3 行进机构结构图
2.1.1 履带行驶系
考虑到铺设车的工作环境,故要求该部分实现在沙漠中的平稳行进,且具有不同沙漠工况的适应性。设计采用履带结构并保证前进方向上的抬升角度β=60°,既可以做到平稳行进避免陷车,还可提高翻越障碍物的能力[3]。
2.1.2 差速转向系
采用双电机独立控制的差速转向和驱动系统,主动轮通过齿轮啮合和传动轴实现动力输出,其余带轮配合轴承一同固定在各支撑轴上。直线行驶时,由两个电机分别驱动两侧履带主动轮,并通过速度控制模块动态调节两侧主动轮转速,实现以v=0.2m/s 的速度同步。转向行驶时,利用差速原理,调节两个电机的转速和转向,以不同转弯半径转向和原地调头。
2.1.3 主要传动部件设计
在对比齿轮传动、带传动和链传动的优缺点后,设计采用齿轮传动,因其传动效率高,可达90%~95%、结构简单紧凑、适应变速变载荷工作、可传递大转矩的优点。其主要设计参数:小齿轮齿数Z1=35、大齿轮齿数Z2=48、模数m=2、螺旋角α=20°,小齿轮选用40Cr,大齿轮选用45Cr,均采用调质处理,7 级加工精度;传动轴应满足工作强度和刚度要求,故采用空心圆截面轴。对其应力校核:危险截面最大弯矩Mmax=98.1kN·m,利用Ansys 进行有限元建模分析计算,危险截面最大工作应力σmax=151.85MPa,远小于空心圆截面钢材的许用应力,满足使用条件。
2.1.4 整车受力及选材
由于沙漠地形起伏变化大以及滚轧深度下的沙土松紧不同,铺设车工作时会承受交变载荷的冲击,就要求行进机构具有较强的结构刚度和吸震性,故设计采用强度高、密度小,约为2.63~2.85g/cm3的铝合金作为主体材料。
2.2 输草机构
2.2.1 功能及组成
为适应滚轧作业特点和保证滚轧铺设效果,即保证草带能够准确地与滚刀前进方向对准,同时保证草带的规整、平稳输出到工作面上,故采用输草机构实现草带的存储、导向和输送。该结构主要由储草箱、导向槽、输送滚筒、驱动电机和支撑件组成。
2.2.2 主要结构部件设计
由于该机构依靠滚筒间挤压而产生摩擦力输送草带,将会使滚筒发生微变形,影响两个滚筒间隙,故滚筒需满足一定的强度、刚度条件,具备抗磨损能力。同时,考虑到滚筒布置形式和刚度要求,故外形尺寸和轴承跨距不宜设计过大。其设计参数:滚筒直径D=10cm、轴承跨距L=75cm;支撑件用于承载重量、储存草带、固定机构,考虑到铺设车所受的变载冲击,故要求支撑和固定件强度大,刚性好,避免位置偏移,可采用45 钢材加工;驱动电机设计参数:额定转速n=38.2r/min,额定扭矩T=9550P/n=9550×0.2/38.2≈50.26N·m。
2.2.3 机构工作过程
当装置工作时,电机驱动滚筒随动,利用滚筒间的摩擦力辅助草带规律输送并准确导向到工作面上。由控制模块调整电机转速,实现输送速度与行进速度相匹配,避免草带因速度过快而堆积,速度过慢而拉扯,维持平稳输送。输草机构结构图如图4 所示。

图4 输草机构结构图
2.3 断草机构
2.3.1 组成及原理
该机构主要由矩形导轨、电动推杆、锯齿刀片以及滑块组成。移动侧锯齿刀片与电动推杆相连接,可沿着导轨作直线运动。固定侧锯齿刀片被固定在输草机构下方,配合移动侧刀片,将草带切断。
2.3.2 主要结构部件设计
该机构由电动推杆执行运动,推力大,性能可靠,能精确控制移动侧刀片在导轨上的位置、速度和行进方向。其设计速度可在7mm/s~60mm/s 间调节,对应推力可在650N~75N 间变化,输入功率Pin=25W,实际输出功率Pout=24.3W;锯齿刀片刚度大,耐磨性好,刃口锋利,切断时间短暂快速;矩形滚动导轨噪音小,耐磨性好,负载能力强,运行平稳,设计长度Ld=45cm,精度为H 级,满足使用要求。由控制系统操作三者配合工作,以保证草带快速切断。
2.3.3 机构工作过程
工作时,电动推杆按照控制信号将推杆伸出,推动移动侧锯齿刀片,沿着矩形导轨做直线运动,推杆先处于高速小推力状态,接近工作点时,变为低速大推力状态,由功率公式Pout=Fv 可得推力F 与速度v 的大小。当与固定侧上下交错啮合时,即可切断上方输草机构的草带,及时定位工作周期,结束当前铺设工作;结束时,电动推杆按照控制信号将推杆收回,带动移动侧锯齿刀片,远离固定侧,返回初始位置,不影响草带的再次输送,避免草带在输送过程中因车身前进而相对向后移动导致的草带和移动侧刀片碰撞。
断草机构结构图如图5 所示。

图5 断草机构结构图
2.4 轧草机构
2.4.1 组成及功能
该机构主要由前刀架、后刀架、滚刀、丝杆、步进电机、支撑件、连接块组成,轧草机构依靠车身重力和牵引力综合作用,通过滚刀将工作面上的草带滚轧进沙土10~15cm,表面外露20~25cm[4]。
2.4.2 主要结构部件设计
刀架采用双片设计,增大设计跨距Lk=15cm,减小侧向摆动和偏移,提高滚刀稳定性;滚刀固定在刀架中间,刀架间采用多组M12 螺柱固定,保证滚刀满足工作负载,行程轨迹精准可靠。刀架校核:取工作负载Fp=150N,利用Ansys 进行有限元建模分析计算,刀架危险截面为三角内弯拐点处,最大拉应力σt=90.95Mpa,远小于铝合金许用应力[σt]=370Mpa,满足使用条件。该机构采用步进电机和丝杆配合工作,实现刀具的抬升和降下。步进电机精度高,易于实现自动控制,可灵活调整工作高度;而丝杆具备自锁能力,且丝杆轴向刚度高,可承受较大负载,较好地固定机构位置。弹簧减震器设计磅数为100磅,可吸收滚刀实际工作时因沙土松紧不同而受到的交变反力,避免异物直接冲击,提高使用寿命。
2.4.3 机构工作过程
工作时,步进电机按照控制信号,通过联轴器带动丝杆转动,使连接块以20mm/s~45mm/s 的速度相对丝杆移动,使后刀架向电机移动,后刀架通过弹簧减震器,使前刀架绕固定轴逆时针转动,滚刀随前刀架旋转下降高度到预定工作深度,最后固定滚刀工作位置;结束时,电机反转,滚刀抬起,高于底面,便于装置行进;过程中,丝杆自锁,将滚刀固定在预定工作深度,保证铺设深度相同。
轧草机构结构图如图6 所示。
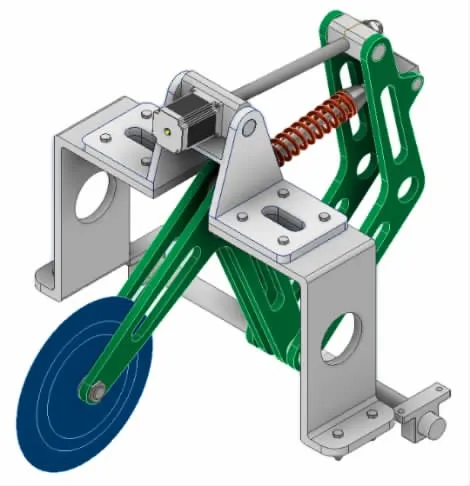
图6 轧草机构结构图
3 控制系统及其工作
3.1 组成模块及其工作
本装置控制系统可分为传感器模块、通信模块、驱动模块、电源模块、监测模块和控制模块。
3.1.1 IMU 惯性导航模块采用I2C 接口和STM32 控制板进行通信传输并选用测量频率1Hz~1000Hz,辅助装置沿规划路径行进,初步判断装置是否正常工作。
3.1.2 通信模块将装置运行数据传输至上位机进行可视化处理,以便实时检查状态。
3.1.3 驱动模块按照设定的PID 算法控制各电机执行操作。
3.1.4 电源模块中的电池模块和ADC 数模转换模块,检测电池剩余电量,计算剩余续航里程。过充放保护模块和稳压模块,控制充放电速度并延缓寿命下降。
3.1.5 监测模块获取环境数据和实时图像,将程序烧录至ESP32-CAM 开发板,再将JPG 图片上传至局域网,后通过串口获取地址,访问进入实时监测控制页。
3.1.6 控制模块接收并解析远程控制指令。
3.2 工作控制流程
系统工作时,上位机与下位机初始化,以物联网为信息载体,由下位机接收上位机发出的目的地信息,通过路径规划算法选择最佳铺设路径,再通过下位机实时接收各传感器采集的数据判断装置运行状态和位置,控制装置沿规划路径工作。工作过程中,下位机控制装置铺设草方格并传输实时图像和关键数据至上位机。上位机接收数据并进行可视化处理,方便操作人员掌握状态,及时确定和解决故障。如果突发异常,则通过报警装置及时通知相关人员。
4 结论
如今,土地沙漠化治理依旧形势严峻,主要治理方式仍采用铺设草方格以防风固沙再进行植被修复实现沙漠治理。现有的机械化设备存在效率低下、自动化和智能化程度低、需依靠人力劳动的现状[5]。本文所设计的基于物联网技术的草风格铺设车,在弥补了现有铺设装置缺点的同时,还考虑了远程操作、实时监控、预警反馈的工作需求以及工况的多样性和复杂性。同时,本设计制造成本低,满足沙漠治理实际需求,应用前景广阔,能有效助力我国应对土地沙漠化问题、推进沙漠生态修复进程、加快构建“美丽中国”。
