一种工业机器人在医学氨基酸样本实验中的应用
2022-07-21吴文俊夏蕾陈晓斌薛增飞
吴文俊 夏蕾 陈晓斌 薛增飞
(琦星智能科技股份有限公司,浙江台州,317600)
0 引言
随着现代化工业制造的发展,工业机器人越来越多的应用在工厂自动化生产中的装配、喷涂、焊接等流程中[1-2]。随着机器人工业的快速发展,工业机器人也更多地延伸到生产和生活中的各个领域。本文实现了工业机器人在医学氨基酸样本试验中的操作。
1 实验需求
在医学实验前,氨基酸样本需要进行提前预处理,其主要流程如下。
1.1 试剂配制
1)内标准品提取液的制备:按1:1:98的比例将内标准品、提取液添加剂加入提取液中,涡旋混合1min,配制成内标准品提取液;
2)复溶液的制备:按氨基酸复溶液:超纯水=4:21的体积比配制成复溶液,混合均匀;
3)待测氨基酸样本、氨基酸低值质控品RQCL及氨基酸高值质控品RQCH的稀释:取10µl待测样本、氨基酸低值质控品RQCL及氨基酸高值质控品RQCH于EP管(小型离心管)中,分别加入40µl氨基酸样本稀释液,震荡混匀(速度达2000rpm,时间为5min),备用;
4)流动相A:量取500ml超纯水至流动相瓶中,再加入1500µl流动相添加剂A及500µl流动相添加剂B,涡旋混合1min,超声10min;
5)流动相B:量取475ml甲醇和25ml超纯水至流动相瓶中,再加入1500µl流动相添加剂A及500µl流动相添加剂B,涡旋混合1min,超声10min。
1.2 加样提取
移取校准品、稀释后的低值质控品RQ CL、稀释后的高值质控品RQCH、稀释后的样本各10µl至EP管中,再移取内标准品提取液100µl至EP管中; 空白样本:取10µl甲醇于EP管中,加入内标准提取液 100µl。
1.3 离心分离
将EP管对称摆放入离心机中,EP管开口处朝里,有利于吸取上清液(样本沉淀后上面透明的液体样本),速度达13000rpm,离心时间5min; 将离心后的EP管放入EP管架中,按空白样本、校准品、质控品(RQCL,RQCH)、待测样顺序,分别移取各自的上清液50µl至96孔板中。
1.4 氮吹
氮气吹入加热样品的表面进行样品浓缩,设置氮吹仪温度至50℃;打开氮气瓶阀,调节气瓶分压阀至分压在0.3~0.4MPa,将氮吹仪吹气口面旋转90°,调节氮吹仪压力阀使转子上缘至刻度40LPM处,将96孔板平稳放在氮吹仪台面上,将氮吹仪吹气口面旋转至正对96孔板,缓慢调节使氮吹仪台面上升至氮吹仪出气口略微伸入96孔板,10 min 后略向上调整氮吹仪台面,20 min后将96孔板取出,用手电筒光从96孔板底部照射,仔细观察96孔板内有无液体,至96孔板内无液体后停止氮吹。
1.5 衍生反应
移取500µl转化液加入至96孔板内,放入恒温混匀仪在60℃、500rpm条件下,振摇30min,进行氮吹步骤。
1.6 复溶
移取复溶液100µl加入96孔板内,以750rpm的速度震荡混匀10 min。
综合分析上述实验步骤可知,整个实验需经历大量的步骤,需要将实验液体在不同的实验试管中进行挪移,而且移液数量较大,最少的实验样本都是96次操作,更多的是其倍数。采用手动移液,不但工作量大,而且在大量移动过程中,也容易造成纰漏。对于这种大批量重复操作,非常适合机器人来完成实验动作,并且机器人操作比人工操作更稳定,不容易出现误差纰漏。
2 电子移液器及其控制方案
电子移液枪是完成实验的核心操作部件,根据医学实验室要求,本文选用德国普兰德电子数字移液器(Brand Transferpette Electronic),该产品是由微处理器控制、电池驱动活塞的电子移液器,采用空气活塞原理,用于移取一般密度和粘度的水相溶液。
电子移液器适应的温度范围较广,可应用于液体处理实验中。根据具体实验需求,本文实验选用单通道数字移液器,其操作面板主要包括程序键、上/下键、移液控制键和吸头脱卸键等,如图1所示。

图1 电子移液器操作面板
其中,程序键、上/下键、移液控制键是电控制信号键,吸头脱卸键是机械操作键。采用机器人进行实验操作时,电控制信号键通过导线连接机器人数字I/O输出端,而机械操作键通过气阀控制,气阀接入机器人的数字I/O输出端。除了电控制部分,针对移液枪的机械形式,考虑其移液的姿态,将移液器固定在一个特定的机械件上,该机械件再与机器人固定连接,这样实现了从电控和机械两方面对电子移液器的操控,将移液器集成的控制部分称为控制模块。
3 六自由度工业机器人
本文选用笔者公司自行研发、设计、生产的琦星六自由度智能协作机器人,其运行功率约200W,本体重量约22kg,载荷约5kg,拥有6个自由旋转的关节,最大工作半径为933mm,定位精度可达0.1mm,可广泛应用于装配、涂胶、搬运、实验室分析等自动化应用环境。

图2 琦星六自由度工业机器人
琦星六自由度机器人外观设计简洁,如图2所示,重量轻。示教器人机界面采用非常友好的可视化触摸屏操作菜单,摆脱了传统的复杂示教编程语言,大大简化了应用编程工作。同时,机器人在控制箱和工具端,配置有多个标准的数字/模拟输入输出接口,支持TCP/IP 100M通信标准,适用IEEE 802.3u标准,也适用100BASE-TX通信介质标准以太网socket连接和 Modbus TCP连接,可以灵活地配置对接各种视频接口、执行设备等。
琦星六自由度机器人的本体设计非常轻巧,放弃了传统的皮带齿轮传动设计,采用同轴输入输出的谐波齿轮结构形式,每个自由度关节的驱动电机设计为高磁密度大力矩空性轴电机,以配合机器人的整体机械外观特点,驱动电机的驱动电路也与被控制电机本体集成为一体,结构上更加紧凑。每个关节的驱动控制电路与系统主控箱通过集中的通信协议进行数据实时交换,通信线缆经过电机的空心轴进行排布,避免每个关节在复杂的运动中造成线缆的扭结。机器人臂体外壳采用轻型材料设计,大大降低了机器人本体重量,减轻了机器人在运行时的本体自身负载重量,提高了待载能力。同时,谐波齿轮的同轴结构可以让每个自由度的臂体直径做的更加纤细,其外径几乎是电机定子外径加上外壳厚度,没有传统的线缆布线空间,大大缩小了臂体直径。每个关节的机械制动由传统的电机抱闸装置变为机械电磁铁限位,大大减少了控制系统占用的空间,实现系统的轻型化。
所有连接到机器人的设备均可以机器人为控制核心而形成一套自动化系统。此外,机器人也可以作为一个独立执行设备,作为更复杂的自动化系统的一部分。
4 系统集成设计
针对医学氨基酸样本试验的具体步骤,本文已分析需要机器人完成的实验动作,考虑系统需要的反馈和执行机构如下。
在硬件方面,因为实验台存在偶尔移动的问题,所以需要配备摄像头(1只),用来反馈实验试剂盒的具体位置;电子移液器及其控制模块,用来操作具体的移液动作;气阀用来操作移液后的脱管动作;琦星六自由度工业机器人(1台),用来作为系统的核心控制机构和执行机构;定制铝板(1块),用来固定试剂盒与其他设备。摄像头通过网口与机械手进行数据连接,移液枪操作手的控制模块以及气阀通过数字输入输出端口与机器人进行连接。铝板上设置有固定的位置定位点,作为整体面板的定位基准,当以面板某一点作为坐标零点时,所有面板上的物体都以该坐标零点来计算自己的坐标位置。具体硬件连接框图如图3所示。
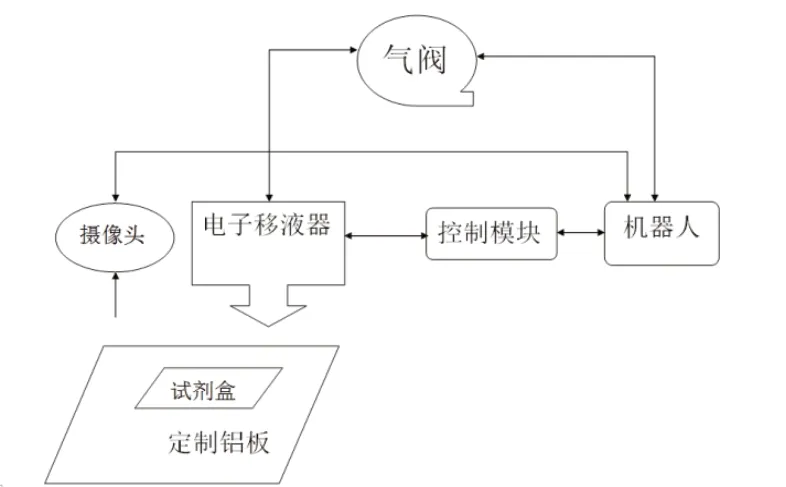
图3 硬件系统框图
在软件设计上,氨基酸样本实验预处理的步骤较多,首先最主要的是对准系统的零点坐标,机器人巡视每个定制铝板上的位置基准点,确定坐标零点作为整个控制系统的控制零点,任何距离与位置都基于此坐标零点;然后计算目标试管的位置,将移液器移动到目标试管的位置。为了确保液体的充分吸入和流出,在移液器进行吸入或释放液体时都进行一定的时间延时,虽然每次移液的目标、移液数量都不相同,但是机器人的操作动作、大致的流程基本相似,每次实现一个位置点的移液后,机器人进入到下一个位置点的移液操作,直至将所有试管液体移动完毕,软件流程如图4所示。
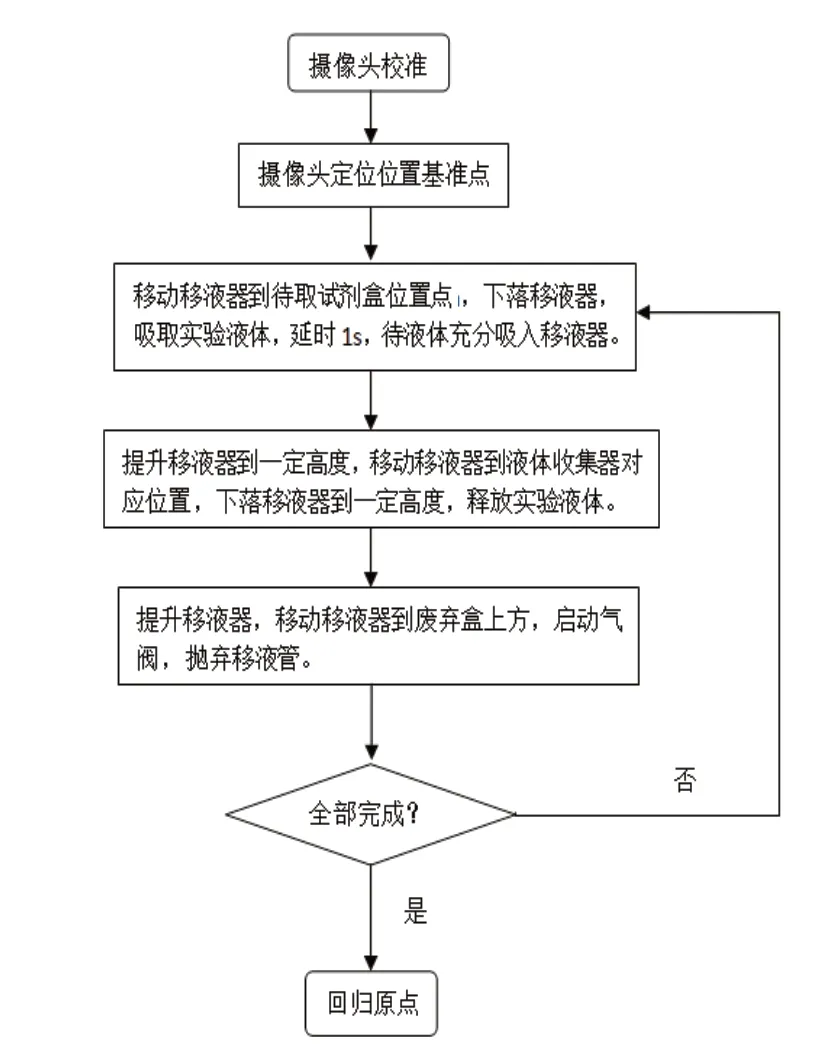
图4 软件流程
5 结论
本文设计的机器人集成系统很好地完成了医学氨基酸样本实验步骤中不同种类的移液要求,此外,本系统灵活性很强,可以适合多种试管或试剂瓶的移液实验,也可适用于同样试管不同数量的移液实验。本系统可拓展性强,除了已经占用的接口,机器人还有多个外设接口,可以继续外接各种拓展应用,如适应除了移液动作以外,再进行其他操作的多种实验步骤的组合动作完成,实现更为复杂的实验操作。