园林植物配置及空间布局规划仿真研究
2022-07-20王玉虎
王玉虎,张 楠
(1. 晋中信息学院食品与环境学院,山西 晋中 030800;2. 山西大同大学机电工程学院,山西 大同 037003)
1 引言
绿化是衡量各个城市发展优劣的评价指标之一,绿化分布的好坏直接反映整个城市的样貌,植物的划分以及空间配置是每个城市建设的一大难题,植物的选取需根据城市的环境、气候以及地理环境决定,在满足人们生活、以最低的成本,最优质的配置且保证植物的存活率的条件下进行城市的空间分布规划是极其困难的,在规划过程中需确保不影响人民生活,同时美观且具有艺术性,针对这一目标对植物的空间分布进行研究。
戴伟等人首先总结出空间植物分布的重点问题,并找出规划问题的主要原因,在此基础上,生成空间布局规划本身包含的特性,从而整理出规划的主要原则以及规划方法,实现园林植物配置及空间分布规划。李鑫等人首先利用两步移动搜索法对空间内的绿化情况以及可进行绿化的区域进行评估,并考虑空间内的供需情况进行空间规划,为保证绿化率,也保证其美观性和艺术性,在空间启发式算法搜索的基础上对原始绿地进行优化,实现园林植物配置及空间分布规划。
以上两种方法没有提前处理园林规划条件之间的矛盾,导致部分较小区域不被发现,或忽略某些不明显的问题,同时当规划问题出现矛盾时会通过增加计算量的方式保证规划效果,不能保证整体空间的均匀度,也使得植物多样性降低,大大降低了空间分布规划的性能,加长了规划时间,并且植物配置的适应度极低。为了解决上述方法中存在的问题,提出基于粒度分层的园林植物配置及空间布局规划方法。
2 园林植物配置方法
2.1 园林空间目标地块的绿量计算
假设在园林空间中选取500多种植物进行种植,每种植物的数量不等,利用目前方法进行配置会大大加重工作人员的压力,无法保证工作完成度,为准时完成园林配置,在进行配置过程中添加园林植物种类规划的绿量指标,即根据绿量的主要特征划分出植物的种类,此步骤的目的是简化植物群落,在简化后的植物种类中提取1-2种代表性植物构建出近似种类的绿量模型。绿量模型是通过植物绿量以及叶面积指数得出园林生态效益的方法,其主要表现方式就是利用数学表达式构建每种植物的个体绿量模型,保证最大程度地降低工作量,假设园林空间中目标区域均有植物,则目标区域的绿量率表达式为
LAI
=LF
×LAI
(1)
其中,LAI
代表目标地块1的绿化率,LAI
代表目标地块1中i
种类植物的绿量率,LF
代表目标地块1中的绿化覆盖率。根据园林空间中目标区域的绿化率进行植物配置,当配置过程中出现植物数量达不到绿化率的要求,此时可通过绿量模型进行修补,从而发挥出绿地的最大生态效益,目标地块绿量的表达式为
Ga
=Ga
灌木+Ga
乔木+Ga
草木(2)
其中,Ga
代表目标地块1的绿量。2.2 园林景观植物配置
园林植物的配置包含多种形式,本文主要针对规则式配置和混合式配置两种形式进行分析。
2.
2.
1 规则式配置将上述已分类完成的植物进行整齐地排列成集合图形的配置就是规则式配置,此种配置方法的要求是必须整齐对阵,且可反复连续,它的主要表现方式分别为:
1)辐射对称配置
辐射对称配置是由中心配置以及环状配置组成,此种配置适用于园林空间较小区域使用,其主要表现形式如图1所示。

图1 辐射对称配置的表现形式
2)左右对称配置
左右对称配置是由对植、三角式以及列植配置构成,这是古典园林中最常用的植物配置之一,其主要是利用同种类的两株植物根据中轴线进行左右对称种植,主要表现形式如图2所示。

图2 左右对称配置表现形式
2.
2.
2 混合式配置混合式配置顾名思义就是将不同的配置形式进行混合生成的一种植物配置方法,可针对不同地势以及不同要求的园林空间进行设计。
在获得了园林绿植覆盖率以及绿量的基础上,可以选择适当的植物配置方法进行园林植物配置。
3 基于粒度分层的园林空间布局规划
基于粒子分层的园林空间布局规划是将园林空间布局规划置于粒度分层的布局模式内,根据约束条件,可优先处理粗粒度空间内约束条件较多的粒子,在粒子空间中分布模型可提前预处理约束条件之间的冲突,并且当两层约束条件发生矛盾时,舍弃较小约束条件的低粒度层,以最小的约束损失降低计算复杂度。当模型中的约束条件不足时,模型可主动添加关于空间布局的约束条件,进而确保园林空间布局的最终规划效果。当园林空间约束条件饱和时,即可对目标函数进行求解,得出其最优解完成空间布局规划,基于粒度分层的园林空间布局规划的算法步骤如下所示:
第一步,定义园林空间的约束条件。
假设园林空间的约束条件集为C
,其优化规则为F
,相邻图模型为A
,园林空间的规范以及层次约束模型分别为N
和H
。第二步,求解相邻图(X
,Γ
,f
,C
)。1)通过将C
映射到相邻图模型A
中生成园林约束条件集合C
,此集合中包含多种园林空间布局的约束种类,分别为以下几种。①判断两个目标地块之间有无连接,其中两块目标地块有连接的约束表达式为
c
(x
,y
)=1(3)
其中,x
和y
均代表园林空间中的目标地块。两块目标地块无连接的约束表达式为
c
(x
,y
)=0(4)
②判断x
和y
之间是否相邻,若相邻则用adjacency
(x
,y
)表示。③,假设目标地块x
的连接程度为deg
ree
(x
),其范围表达式为:C
={C
1,…,C
}(5)
2)构建邻近期望连接强度矩阵。
构建此矩阵可有效地将本无关系的目标地块进行连接,则相邻期望连接矩阵的表达式为
P
=(p
(i
,j
))(6)
根据上式矩阵构建出粒度层中的估计函数f
,并将规则库K
以同样方式映射到此粒度层中。3)求解约束函数
在探索约束函数求解方法时,可通过估计函数f
进行更新,当约束值c
的大小和此粒度层中已处理过的约束值发生冲突时,需改用回溯方法进行求解,当回溯方法的计算次数超过固定阈值,或已经遍历了全部情况,同时符合约束集C
的条件,此时只需在此粒度层中任意选取一个解即可。第三步,计算规范约束图(X
,Γ
,f
,C
)1)将约束集C
投影至规范约束函数模型N
上,生成约束函数集合C
,C
内的约束项包含多个约束单元项。2)求解约束函数
在计算过程中若出现约束值c
有矛盾时,需判断c
与发现矛盾对象之间的关系,若只是与上一粒度层出现矛盾即可抛弃约束c
,否则需利用回溯方法进行处理,当回溯次数超过阈值或遍历了全部情况,则将此函数视为无解,结束计算。假设已经遍历完全部约束,但仍有部分单元项之间没有方位联系,则针对这几个单元项寻找其方位联系,并且保证方位联系符合约束C
的要求以及邻近图之间的结果无矛盾,最终在次粒度层中选择出一个合适解集即可。第四步,求解层次约束图(X
′,Γ
′,f
′,C
′)1)为生成约束集合需将约束C
投影到层次约束图模型H
中,此时的集合为C
。2)将相邻图以及规范约束图中的约束条件进行融合生成层次约束图(X
′,Γ
′,f
′)。3)求解约束函数
当正常处理完全部约束,生成的结果图为(X
,Γ
,f
),若在求解过程中约束值c
发生矛盾,且发生矛盾的对象仅仅是上一层约束条件,则直接抛弃约束项c
,反之利用回溯方法进行求解,当回溯次数超过阈值或者已遍历完全部情况,则将约束函数视为无解,直接进行下一项计算。第五步,假设C
′=C
-C
∪C
∪C
,此粒层的约束为C
′和(X
,Γ
,f
),当正常求解出函数,记录结果并结束计算,否则宣告此粒度层失败,并上报上一层计算结果。通过上述方法可有效通过各层之间的约束对空间分布进行约束,使得规划效果最佳,同时尽可能地满足空间规划的约束条件。
4 实验结果与分析
为了验证基于粒度分层的园林植物配置及空间布局规划方法的整体有效性,分别采用所提方法、文献[4]方法和文献[5]方法进行空间分布整体性能、空间布局规划的适应度值以及空间规划时间的测试,测试结果如下。
4.1 空间分布整体性能
为评价三种方法的空间分布规划效果,利用总体分数对其进行评估,结果如图3所示。

图3 三种方法空间规划的分维度
根据图3可知,三种方法随着粒度的增大其分维度均有所上升,但所提方法的分维度上升幅度较小,未出现差别较大的分度,即尺度转折点,其他两种方法均有转折点且维数上下浮动较大,不利于空间的分布,极易出现空间分布单一的情况。
粒度分层最直接的影响就是空间规划的分离度,任何方法均不能避免规划后的空间分布常出现分离的情况,因此,在进行规划前需要设定分离度的允许波动范围,即图4中的阈值上下限。
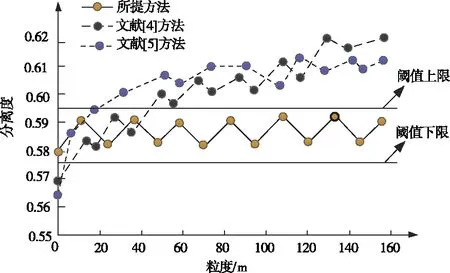
图4 三种方法的空间分离度
由图4可知,只有所提方法的分离度始终在可控范围内,其余两种方法的分离度都随着粒度的增加而直线上升。
图5和图6分别是三种空间分布规划方法的多样性和均匀度分布情况,植物空间分布规划的目的是保证均匀度的同时尽可能地提高植物的多样性,但众所周知粒度增加的缺点就是多样性的减少以及均匀度的降低,因此,对比三种方法在同样粒度条件下的多样性以及均匀性即可评估出最优方法。

图5 三种方法空间分布的多样性

图6 三种方法的空间分布均匀度
根据图5和图6可知,最优方法为所提方法,因为该方法的多样性以及均匀性均是三种方法中最高的,虽然在粒度增高的同时该方法的均匀性和多样性虽有所下降,但其波动幅度较小,而其余两种方法的波动幅度较大。综上所述所提方法的空间规划性能最优,效果最好。
4.2 空间布局规划的适应度值
为了进一步验证所提方法的有效性,比较三种方法的植物空间适应度值。在粒度算法中,为求解出最终的规划结果,需多次迭代得出最优解,因此,适应度值会逐渐升高,当适应度值升至高峰就会停止上升,并始终保持该适应度进行规划。适应度函数的最终值越高说明该植物的配置结果越适应空间分布。植物配置适应度函数的计算公式为

(7)
其中,F
(X
)代表空间分布规划结果的适应度函数,ω
代表惩罚因子,f
(X
)代表空间规划的目标函数。不同方法的植物空间适应度值对比结果如图7所示。
图7 不同方法植物空间规划适应度
由图7可知,随着迭代次数的增加,三种方法的植物配置在空间分布规划中的适应度以不同的速度上升,直到达到三种方法可达到的最高值后不再变化,其中,文献[5]方法的适应度不仅最低,且适应度值十分不稳定,文献[4]方法的适应度较稳定,但该方法到达适应度峰值的迭代次数要高于所提方法,且适应度远小于所提方法,所提方法的适应度最高,说明其规划结果最优。
4.3 空间规划时间
空间规划时间是检验植物配置和空间分布规划的指标,将三种方法的结果进行比较,得出的实验结果如图8所示。

图8 不同方法的空间规划时间
通过对比后发现,所提方法的空间规划用时最少,说明所提方法的效率最高,这是因为所提方法在进行空间分布规划的过程中在粒子空间中提前处理园林规划条件之间的矛盾,发生冲突时会第一时间以最小的损失降低计算复杂度,从而大大提高空间规划效率。
5 结束语
城市的绿化建设十分重要,不仅能改善城市环境,也能提高生活质量,但在进行空间布局规划前需要考虑目前空间的环境特点,因地制宜选择合适的植物进行配置,保证植物的存活率,因此提出基于粒度分层的园林植物配置及空间布局规划方法,首先根据绿化率选取合适的植物以及配置方法,其次在粒度分层的基础上对空间分布进行规划,解决了空间分布整体性能差、空间布局规划的适应度值低以及空间规划时间长的问题,更有效率地进行城市绿化建设,使得城市绿化得到更好的发展。