基于SLAM的智能机器人在大型枢纽机场的应用
2022-07-14李名杰詹红梅
李名杰 詹红梅
(1.北京大兴国际机场,北京 102602;2.厦门瑞为信息技术有限公司,福建 厦门 361004)
0 引言
随着我国民航事业的快速发展,飞机出行越来越普及,这对民航出行服务提出了更高的要求。目前,智能服务机器人已经广泛应用于生活的方方面面,可以更广泛地代替人工从事各种生产作业,大大降低了人工成本。服务机器人智能化的工作模式可以有效地提高其工作效率,并在一定程度上提供基于科技发展的多项智能化服务,现已应用于教育、家庭、交通以及救援等领域。
随着市场需求和技术的发展,服务机器人的发展空间将继续扩大。机器人除了需要具备日常乘客所需的基本信息查询功能外,还需要进一步丰富和完善它的个性化服务功能。因此,在大型枢纽机场应用基于SLAM 的智能机器人,可以实现行李放置功能、跟随功能,使机器人化身为乘客的得力助手,对提升旅客出行服务具有重要意义。
1 系统整体设计
1.1 SLAM
同时定位与地图构建(Simultaneous Localization and Mapping,SLAM )涉及一系列复杂的计算和算法,需要利用传感器在未知环境中构建地图和结构,并确定设备的位置和方向。因此,SLAM 问题可以转化为移动机器人位置运动和观测信息的概率计算问题。针对某大型枢纽机场具有空间大、人员复杂以及服务项目繁多的特点设计了智能化机器人,与传统的机场航显设备相比,该机器具有灵活性高、服务主动性强的特点。SLAM 智能服务机器人在航站楼场景下,可通过面部识别技术获取旅客行程信息,为旅客提供航班查询、路线引导以及行李搬运等便捷服务。
1.2 机器人导航中的同步定位
当移动机器人进入陌生环境时,要解决“我在哪”以及“我周围的环境是怎样的”2 个问题,只有这样才可以更好地进行移动和工作。项目采用激光雷达SLAM 技术,该技术源于早期的一些基本测距和定位方法,例如红外传感器测距和超声波传感器测距。激光雷达对机场周边的物体进行感知、采集,获取物体在三维空间中的坐标和类别信息,并形成点云数据集。将点云数据集与不同渠道的数据进行融合,实现机器人确定运动距离、感知环境变化以及移动定位的功能。
1.3 机器人导航中的地图构建
在原有SLAM 的基础上以及场景地图信息构建的扫描匹配过程中,多种常用方法将迭代最近点法与邻域法结合在一起,以不同的机器人运行速度实时调整并构建简单的场景地图,在一定程度上提高了SLAM 的效率和质量。
1.3.1 避障
机器人需要在运动过程中解决的问题就是避障,而障碍物一般分为静态障碍物和动态障碍物,例如人体、柱子等。在静态障碍物避障方面,基于矢量场直方图法的自适应阈值避障方法解决了机器人移动过程的静态碍物,为保障避障时的绝对安全,在设定阈值时,需要让机器人多跑线路,再取一个相对安全值。在避开动态障碍物方面,采用基于相对坐标系的避障方法,即避开静态障碍物的坐标系,在机器人移动过程中根据自身尺寸,利用所携带传感设备,实现在移动过程中动态避障的功能。
1.3.2 构建实际应用地图
构建在航站楼环境下的实际应用地图,例如机场自建的地理信息系统(GIS)将为机器人导航提供更精确的空间数据,机器人与GIS 系统数据对接,实现室内导航、商业线路指引等可视化应用。激光雷达建立的扫描图只有黑色和灰色,分别代表障碍物体和未知区域,缺少白色区域,即已知区域(可通行区域)。当只有灰色和黑色时,无法在导航中使用该地图。原激光扫描图的基础上对地图进行美化,以实现可视化呈现的目标。如图1 所示。
2 机器人机械结构
2.1 驱动转向模块
采用双差速轮高效联动变速驱动和万向轮辅助装置,内置减速机和250 W 轮毂伺服电机,通过高精度联轴器与电机直接驱动。起动力矩大,易于启动和停车,适用于人流密集型场景。
2.2 运动控制系统模块
该模块采用双层控制结构,使PLC 系统与控制板相结合,上位工控机主要用于环境感知和数据处理,下位机接收工控机指令和辅助设备信息,控制驱动电机,二者通过RS232 通信协同工作。
2.3 环境感知模块
该模块搭载了视觉传感器、激光雷达以及红外等传感器,将环境感知的信息上传给工控机进行处理,同时搭配了32 寸大屏显示,如图1 所示。
3 机场服务机器人的应用
3.1 智能服务机器人
机场智能服务机器人(移动式智慧航显)是一款具备认知能力的机器人,其设计初衷是为旅客提供自助服务,满足旅客的个性化需求,为旅客提供多元化的服务体验。该机器人的外形如图2 所示,该机器人目前已在某大型枢纽机场航站楼为旅客提供服务。雷达扫描仪和摄像头还可以获取建筑物信息、绘制机场地图、进行机场导航、不断扫描周围环境、避开附近的障碍物和人员以及保障运行安全。依托机场“One ID”人像平台,该机器人还搭载了激光雷达、超声定位以及人脸识别等多项技术,可以在人群中自由穿梭。
3.2 机器人在旅客出行中的应用
机场智能服务机器人通过前期扫描绘制航站楼内地图,以实现精准定位的功能。对接机机场“One ID”人像平台和离港信息系统来说,旅客无须使用身份证验证,只需要面对机器人,就可以自动完成查询并提示引导,旅客“即刷即走”。与传统的航班显示屏相比,移动式智慧航显能突出旅客出行的航班信息、航班状态、登机口信息以及位置,无须在航班信息引导屏上检索自己的航班信息,能具体了解登机口位置与路线,可以对乘机时间进行预判。
机场机器人工作地点为室内,传感器须探测机器人本体200 cm 范围内的障碍物,因此,选用的传感器包括编码器(测转速,速度控制)、红外测距传感器(静态避障)、超声波传感器(动态避障,测定障碍物距离)、红外传感器测距、激光雷达(判断有无人员靠近)以及高清双目摄像机(人脸采集,人脸识别比对)。
其中,人脸识别采集采用基于位置信息与表征信息融合的跟踪算法对视频序列中的相同目标进行跟踪,为每个目标分配独立的ID 号,当人低头或者人脸被其他人或物体遮挡时,通过头肩检测算法依然能够准确地进行跟踪,确保人员检测目标跟踪的准确性,对于同一个ID 号的所有人脸,脸部抓拍摄像头内嵌的人脸质量算法通过角度、模糊度以及光照亮度等信息综合评判1 张人脸图片的质量评分,即从同一个旅客名下的所有人脸图片中筛选质量最优的1 张图片,将最优的人脸部分裁剪后上传至机器人内嵌电脑。当旅客再次出现在机器人前面时,摄像头自动抓拍人脸,并与之前存储人脸图像进行比对,从而完成查询登机口、查询线路、驱动机器开舱门以及行驶等任务。
机器人安装的超声波传感器利用发生器发射超过频率大于20 kHz 的声波,采用I/O 口TRIG 触发测距(需要大于或等于10 μm 的高电平才能触发测距)。模块自动发送8个频率为40 kHz的方波来检测返回信号。返回信号通过I/O 口输出高电平,返回信号的脉冲宽度与距离成正比。测距公式为L=C×t/2(其中,L 为测量的距离长度;C 为超声波在空气中的运动速度;t 为从发出信号到接收信号的时间差)。红外传感作为测距和障碍物避让的一种补充,当机器人遇到障碍物时,红外信号反射回来被接收管接收,通过反射光线的强弱判断障碍物的距离。当检测到障碍物时,红色指示灯点亮,端口输出低电平。传感器输出端口OUT 可以直接连接单片机I/O 口,在单片机接收外部中断信号后,通过设定的机器人内部程序改变底盘的运动方向和速度,完成机器人躲避障碍物的动作。机场服务机器人采用6 路红外避障,均布在机器人圆形底盘上,通过机器人可以了解周边障碍物的信息,同时结合超声波传感器探测到的障碍物信息,从而绘制环境中障碍物的总分布图。机器人根据分布图来判断周边障碍物的情况,根据设定的避障算法调节电机方向和速度,进而有效躲避障碍物。
3.2.1 查询登机口
查询登机口的步骤如下:1) 视频流检测可用人脸,抓拍到可用人脸后将图像发送到人脸比对模块进行人脸1∶N比对(N 为人脸库中所有人脸照片的数量)。2) 通过比对找到人脸关联查询用户的登机口信息。3) 返回用户登机口数据。
3.2.2 行李托运
行李托运的步骤如下:1) 视频流检测可用人脸,抓拍到可用人脸后保存到本地,并将其作为打开行李舱门时验证的底库人脸图像。2)当打开舱门时,视频流检测抓拍的可用人脸图像后,将其与本地保存的底库人脸图像进行1 ∶1比对。2) 比对成功,向舱门输出打开舱门信号,舱门打开。
3.2.3 移动导航
移动导航的步骤如下:1) 应用程序向底盘传入终点的点位名称,下发移动任务。2)底盘接收移动任务,开始移动。3) 将移动任务执行结果发送至应用程序。
3.3 拓展应用
3.3.1 乘机服务
机器人还可以应用于行李托运环节,通过识别旅客身份及航班信息,将旅客信息运送到行李托运处并完成托运。
3.3.2 商业拓展
未来机器人可结合商业系统实现航站楼内商业店铺引导并开启跟随模式,旅客可将行李放置在机器人存储仓内,畅享机场提供的商品与美食,也可以实现商品广告推荐功能。
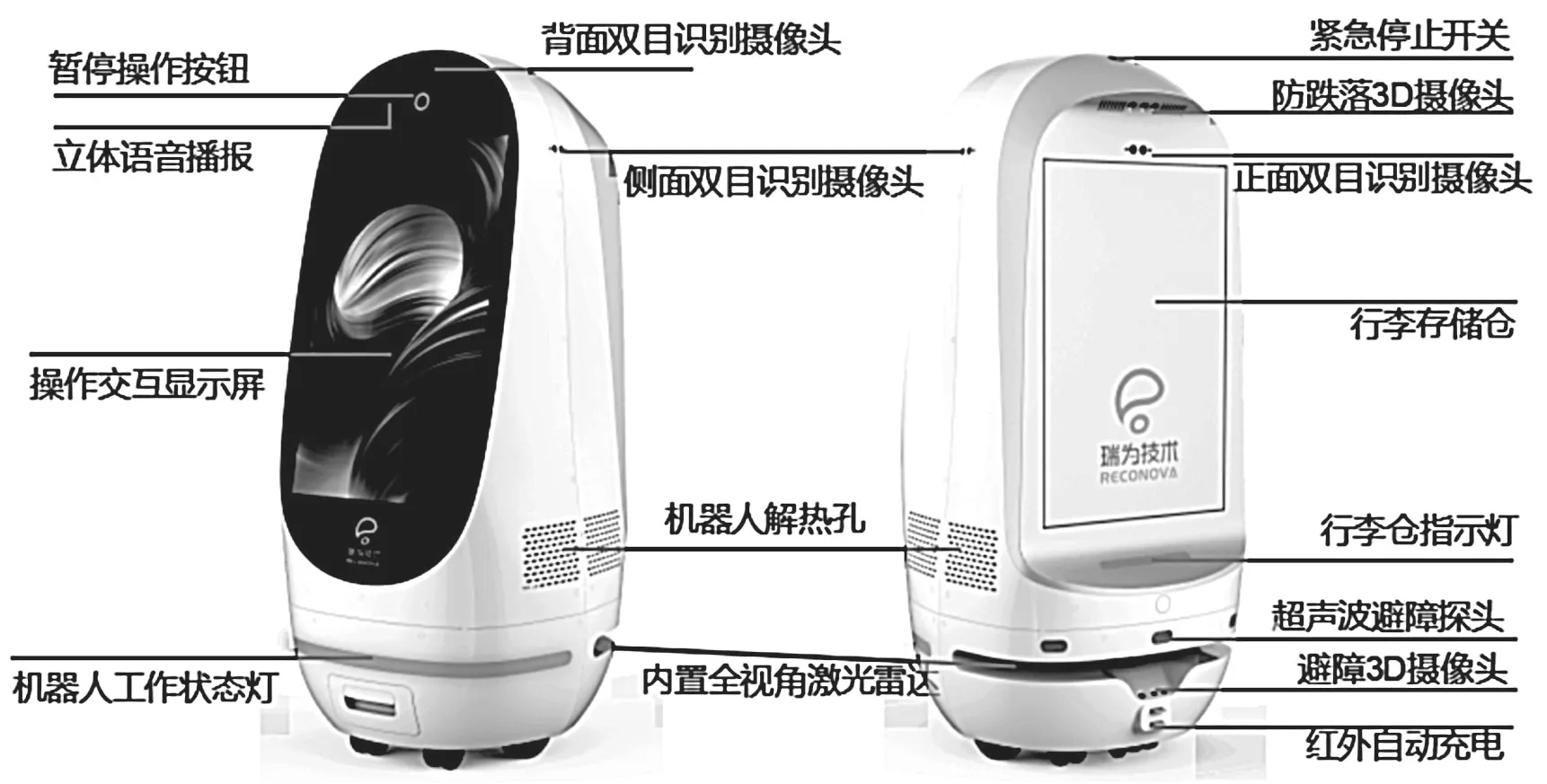
图1 智能感知设备示意图

图2 机场智能服务机器人(移动式智慧航显)
3.3.3 全景人员巡视
机器人可用于全景人脸巡视,机器人四周设计有双目摄像头,可全方位识别周围人脸信息,区分VIP 客户和异常人员(包括航班临飞找寻人员、托运行李异常人员、行迹可疑人员以及外貌可疑人员等),结合业务的具体需求,机器人将针对不同人群做出不同反应,可作为现有机场安保系统的补充力量。
3.3.4 巡检及勤务辅助
机器人可更精细地区分人流密度(某一区域不同人群类型的密集度),可为机场勤务安保、商业选址提供数据参考及决策支持。
4 旅客隐私保护及敏感信息处理
4.1 信息采集阶段
当旅客靠近智能机器人设备时,不自动开启拍摄和收集功能。
在智能机器人服务的首页,清晰地显示2 种查询航班信息的选项,即输入证件号/航班号查询或使用人脸识别。
如果旅客选择使用人脸识别进行查询,就可以在设备屏幕上显示告知“我们将收集您的人脸信息并做必要处理,以匹配查询航班和登机口信息”,并提供“同意”、“不同意”选项供旅客选择。在旅客结束服务后,自动退出查询结果页面,返回首页显示页面。
4.2 信息存储阶段
系统仅保留旅客的查询记录和航班信息并生成日志,其作用主要是当查询出现错误时用于查找原因,在日志中不保留旅客的人脸信息。
以加密的形式存储旅客的人脸信息,并设置访问权限机制,同时保留访问和传输的技术日志。
5 函数及接口设计
5.1 协议形式和连接方式
基于TCP socket 的网络通信,协议接口内容采用类url的字符串格式,接口反馈数据统一采用json 格式,同级字段间没有前后关系,解析时使用json 的标准解析方式。
连接方式为TCP 连接,网络设置为TCP 客户端,服务器端口为31001,服务器IP 地址如下:1) 192.168.10.10(这个是底盘主机的静态IP 地址,TCP 客户端主机需要通过路由器等设备与底盘主机建立局域网连接,有相同网段192.168.10.*)。2)底盘通过API 连接局域网Wi-Fi, 再通过API 获取的局域网IP。
5.2 导航任务相关接口
接口描述如下:参数中的location 的坐标是相对于“地图”坐标系的,由于直接调用(x、y、θ)在使用中不够直观和方便,因此提供“事先标锚点,而后使机器人重返锚点”的工作形式,“锚点”统一用marker 代称。在机器人采用自动导航和避障的过程中,机器人会自动规划路径和调节速度,不需要操作者干预,相关参数见表1。
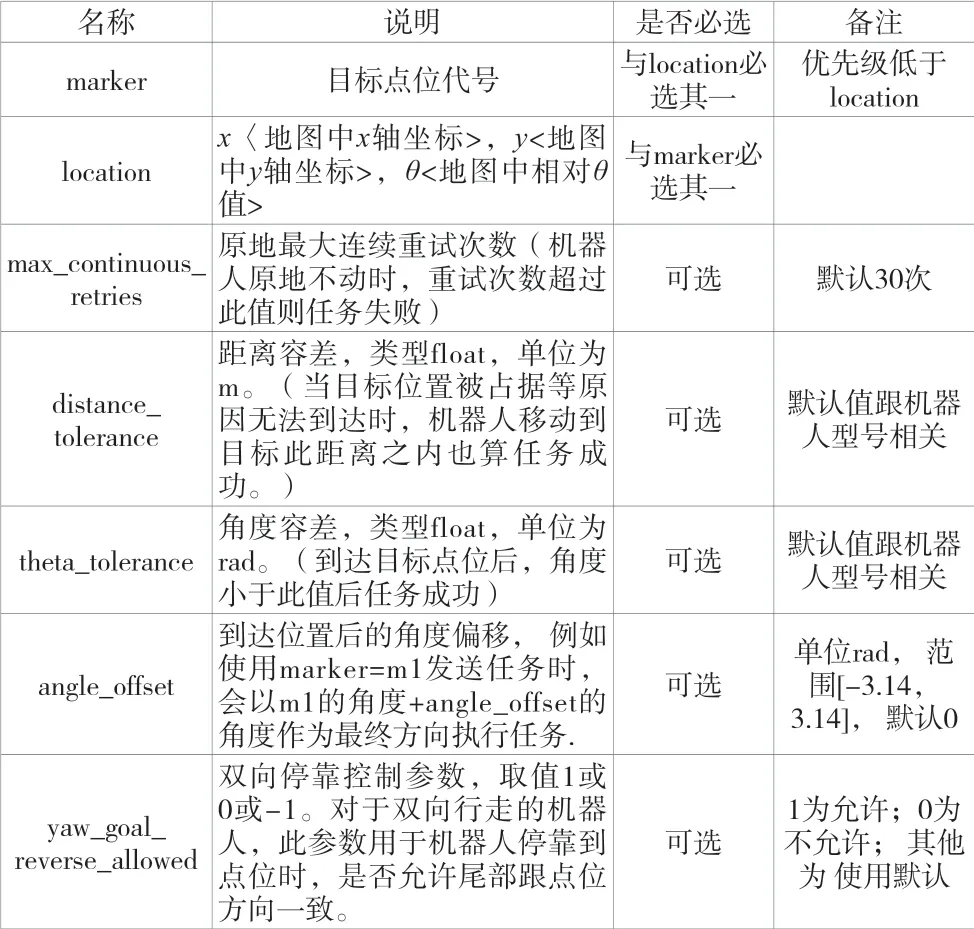
表1 导航任务相关接口参数表
6 结语
航站楼智能服务机器人所代表的自助服务是智慧机场建设中的重要环节,可以在提高旅客出行体验、节约机场人力资源成本方面发挥重要作用。某大型枢纽机场在国内其他机场中率先启用SLAM 智能服务机器人,并不断对结果进行优化处理,为旅客提供相关服务(例如航站楼问询指引、行李搬运、店铺推荐、机场游玩攻略、登机口智能寻人、餐饮配送以及楼内巡查等),后续可通过与各品牌门店营销活动、机场活动等进行关联,加强航站楼运营的服务保障,从而显著提高旅客出行舒适度与便捷性。
