复杂地形条件下多AIRS辅助角度域AoA定位方法*
2022-07-12夏晓晨李博扬李海泉
于 莹,许 魁,夏晓晨,周 涛,李博扬,李海泉
(中国人民解放军陆军工程大学,江苏 南京 210007)
0 引言
随着5G技术在全球范围内广泛应用,对6G的研究随即展开。智能反射面作为未来无线通信的关键技术之一,是近几年的新热点。智能反射面(Intelligent Reflecting Surface,IRS)本质上是一种超材料,利用集成在平面上的大量无源反射阵元,通过硬件或软件编程对入射信号的反射相位和幅度进行控制,实现基于传播环境的智能、可重构无线传输,从而达到提高无线通信系统性能的目的。与传统中继对比,IRS具有增强网络覆盖范围,提高频谱效率、能量效率以及低部署成本的优势[1]。我国幅员辽阔,山川密林、高山峡谷构成了复杂的地形环境,同时城市高楼林立,极其容易造成通信链路的遮挡。IRS便于部署,对工作环境要求不高。使用IRS中继,终端目标点的信噪比与IRS元素的数目平方成正比,可以大幅度地提高终端目标点信噪比。同时,IRS可以方便地布置在建筑物上或借助无人机等部署在空中,利用其良好的反射特性,可以解决高频段通信方向性较差、覆盖不足的问题[2]。6G是万物互通互联的时代,在这个大背景下,IRS将以其部署灵活,支持不同的网络架构和数据应用多样的特点,提升通信质量[3,4]。
IRS在态势感知方面的应用正成为一项研究热点。在任何实际应用场景中,位置信息的重要性都不可忽视。精准获取位置信息不仅可以在系统设计中实现简化波束成形设计,而且可优化IRS的部署,从而更好地服务于整个系统。但目前业界对于IRS的研究很少,并且IRS本身没有感知模块,将其用于定位面临一定的挑战。在文献[5]中,作者初步提出了利用IRS进行无线电定位和映射的可行性以及所面临的挑战。文献[6]研究了IRS辅助的下行用户定位和自适应波束成形策略。文献[7]中提出了一种角度域三维到达角(AoA)定位策略以获取目标点的位置。但在复杂地形条件下,由于目标点的位置未知,AIRS部署位置可能不能够提供强的视距(Line-of-Sight,LoS)条件以进行目标点测向,因此定位误差将会增大。依据目前研究,虽然称IRS为智能反射面,通过一些算法可以实现反射相位、反射幅度可调,但是远远没有达到真正的智能化,同时由于实际场景中目标点多是动态的,为了更好地满足信道条件达到定位目的,实际应用中通常要部署多个IRS。因此,如何在多个IRS中准确选择有效IRS实现精准定位是亟待解决的问题之一。
基于以上分析,本文提出基于离散傅里叶变换(Discrete Fourier Transformation,DFT)的多AIRS级联信道择优算法,主要成果总结如下:
(1)适用场景多样化,可提高定位系统的鲁棒性,对山地、丛林等复杂环境的适应能力较传统定位系统有所增强;
(2)提出的算法复杂度不高,对设备要求低;
(3)仿真结果表明,提出的改进算法能够实现更高精度的目标定位。
1 系统模型
依据实际场景下的定位需求抽象为如图1所示的系统模型,利用升空平台、无人机等设备部署I个空域IRS(Aerial IRS,AIRS)、一个多天线的信号接收基站AP和处于未知位置的目标点,由于山川密林的阻挡,AP与目标点之间不存在视距信道。

图1 系统模型
1.1 信道模型
设AP端竖直配置均匀的天线数量为M的天线阵,每个AIRS载有N个反射阵元,即水平方向上有Nx个反射阵元,竖直方向上有Ny个反射阵元,构成均匀平面阵列(Uniform Planar Array,UPA)结构,且AP的天线间距和AIRS各元素的间距均为d。第i个AIRS到AP的信道可以表示为ci=CM×N,假设信道ci有l条路径,l=1表示LoS路径,l≥2表示非视距(None-Line-of-Sight,NLoS)路径,则有:

同理,目标点g到第i个AIRS的信道为rgi∈CN×1,假设信道rgi有k条路径,k=1表示LoS路径,k≥2表示非视距(NLoS)路径,则有:
1.2 模型简化
在地对空通信中,无线信道往往是以LoS为主导的,NLoS成分通常可忽略不计[8,9]。实际上,完全的LoS信道适用于建筑物较少的地区或者升空平台的高度足够高(大于40 m)的情况,对于其他环境而言,用概率LoS和莱斯信道模型来表征信道会更加准确[10]。因此本文使用莱斯信道模型来表征信道。根据文献[11]、文献[12]、文献[13]、文献[14]、文献[15],信道ci和rgi可以简化为:

2 基于DFT的多AIRS级联信道择优算法
2.1 基于DFT的角度域测向算法
文献[7]中研究了AIRS辅助角度域测向算法,其基本原理如下文所述。
AIRS的反射系数矩阵可以表示为:

式中:ain(n=1,2,…,N)为AIRS的振幅反射系数;ejωin表示AIRS处的相移反射系数;ωin∈[0,2π)为AIRS的反射相位。现有研究中,一般不考虑AIRS的振幅反射系数,因此本文只考虑其相移反射系数,为简化计算不妨令ain=1。
由于AIRS为URA结构,可以分辨三维空间的AoA,为便于研究信道fk,i的角度域性质,分析AIRS的反射系数向量为:
式中:qi和pi分别为水平方向和竖直方向反射阵元的反射相位;⊗为克罗内克积。
基于上述分析,目标g经过第i个AIRS的反射到达AP的信道可表示为:

式中:γ=γciγrgi为常数,表示整个路径的损耗;τ=d/λ,λ为信号波长,ξgn为:
式中:A=sin(αi)sin(βi);B=sin(θgi)cos(φgi);C=sin(θgi)sin(φgi);D=sin(αi)cos(βi)。
为获取路径的角度域信道,对信道Cgi做DFT变换,这里定义M-点的归一化DFT矩阵为:

则Cgi的M-点DFT变换,即Cgi的角度域信道可以表示为:

Fgi中第t个元素可以表示为[Fgi]t,将[Fgi]t取模值为:

根据DFT的性质,Ω的每一列表示波束的物理指向,|[Fgi]t|表示各个方向上的增益分布。所有波束都具有正交性,从而形成了正交的波束空间,其中只有少量波束的增益是显著的,指向了信号的方向。
2.2 复杂地形条件下的多AIRS联合定位
在复杂地形条件下,利用多个AIRS对目标点进行定位时,由于建筑物、山地以及树木等的遮挡,可能存在部分AIRS布设的位置不合理从而不能提供足够强大的视距传输的情况,而且由于目标点位置,也不能够对AIRS布设的位置进行调整,此时若直接使用所有AIRS进行定位,会导致目标点的定位误差增大,降低定位性能。因此在上述研究的基础上对算法进行了改进,提出了一种AIRS选择算法。对不同视距条件(莱斯因子取不同值)的角度域级联信道研究发现:
(1)对于视距条件差的AIRS,其级联信道的角度域特性如图2所示,基本呈现角度域信道的增益存在不止一个“极点”的特征;

图2 较差视距条件下信道角度域特性
(2)对于视距条件较好的AIRS,其级联信道的角度域特性如图3所示,也有可能存在多个“极点”,但是LoS路径对应的极点比其他极点的增益高。
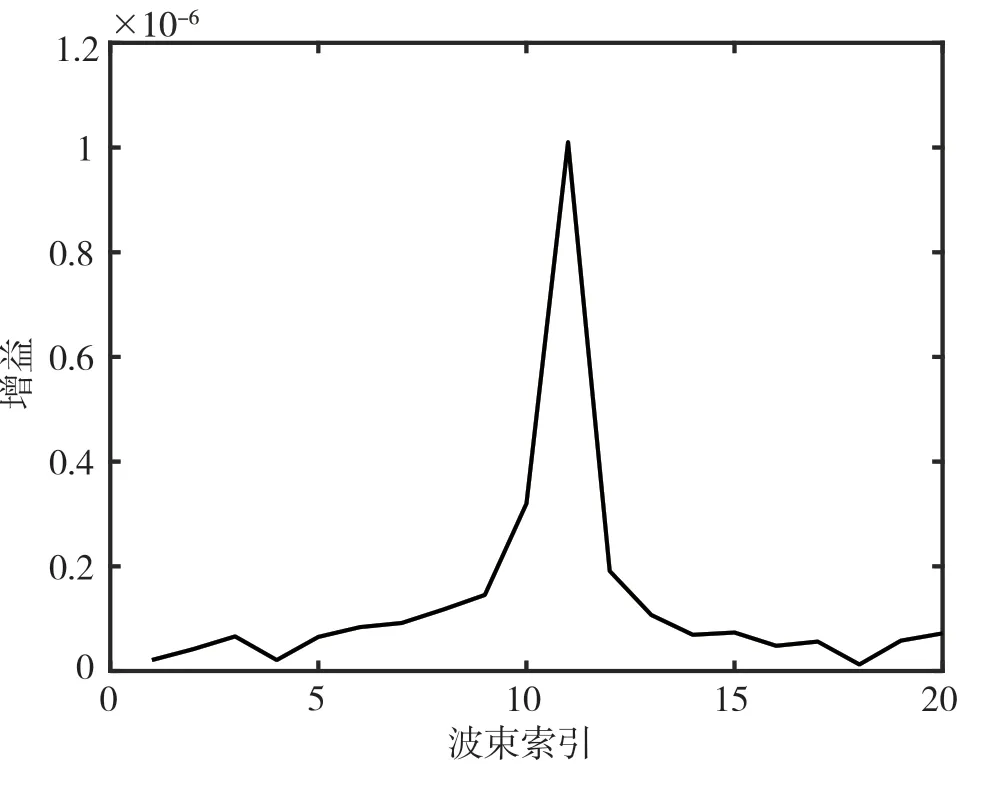
图3 良好视距条件下信道角度域特性
由此可以推断,当只有LoS路径时,其级联信道的角度域增益只存在LoS路径的一个极点。
基于上述分析,在定位时应当尽量选择视距条件较好的AIRS进行定位,因此提出多AIRS选择算法。
假设有I个AIRS可用于目标点定位,各个AIRS提前布设于确定位置。获取各个AIRS级联信道的角度域增益向量ai(i=1,2,…,I),得到各个向量极点组成的向量pi(i=1,2,…,I),计算LoS权重系数ki,其定义如下:

式中:ξi=Mτcos(αi)+1。定义AIRS的权重系数向量为k=(k1,k2,…,ki),选择k中最大的两个权重系数(假设为kp和kq,并且kp>kq)所对应的AIRS索引q和p作为用于定位的基本集合,即τ=0.5λ,R={p,q},找出k中最小权重系数(假设为kc),将kp和kq从k中移除,对于剩余的权重系数ki,i=1,…,I,i≠q,p,若满足ki≥ς*(kq-kc)+kc,则其对应的索引i可以加到集合R中,其中,系数ς∈[0.5,1)为ki距离kq的程度,若ς越接近于1则表示ki越接近于kq,其信道的LoS强度与第q个AIRS相差不大,可用于定位。随后重复上述步骤,依次遍历所有的ki最后确定R,使用集合R中元素对应的AIRS序号对目标点进行定位。
3 数值仿真
仿真如图4所示,场景中使用6个AIRS来进行定位。

图4 仿真模型
具体的参数设置如表1所示。
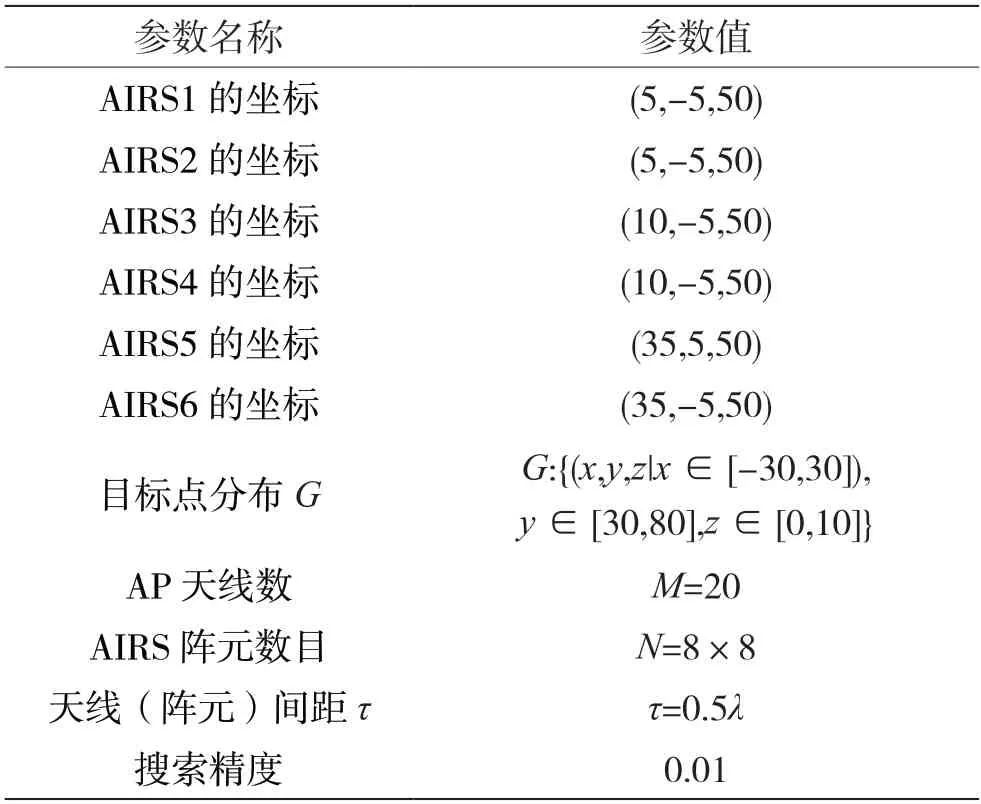
表1 参数设置
首先,仿真AoA测向算法的性能。使用第一个AIRS对目标点进行测向,本文研究了不同莱斯因子取值下AoA测向算法的角度估计性能。对于每一个莱斯因子κ的取值,进行1 000次实验,每次实验目标点的位置随机给出。目标点角度估计误差记为:


图5 角度误差估计趋势
其次,研究所提出的AIRS选择算法的性能,这里使用6个AIRS对目标点进行定位,进行1 000次随机实验,每次实验中目标点位置随机,其各个信道的莱斯因子也在0~30 dB范围内随机给出。主要比较两种方案。
(1)不做选择:不对AIRS进行选择,每次都使用6个AIRS同时对目标点进行定位。
(2)AIRS选择算法:每次实验中,使用所提出的AIRS选择算法选择合适的AIRS对目标点进行定位。
仿真结果如图6所示,对于所提出的算法其定位误差在1 m以内的累计概率为65%,2 m以内的累计概率为89%。而对于不做选择的方案,其定位误差在1 m以内的累计概率为35%,在2 m以内的累计概率为82%。此外,经计算AIRS选择算法的平均定位误差为0.99 m,而不做选择方案则为1.39 m。因此所提算法具备更好的定位性能。
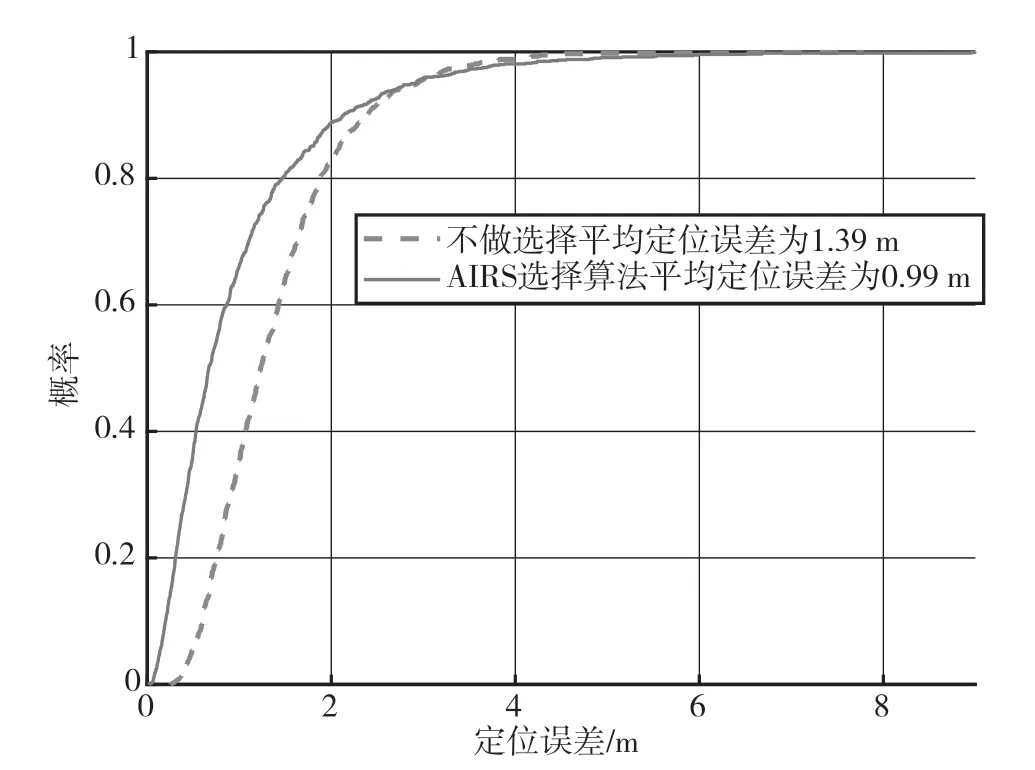
图6 定位误差概率
最后,研究在AIRS位置扰动情况下,所提算法的定位性能。在实际情况下,由于AIRS布设于空中(无人机上),其自身的位置受到环境、无人机GPS以及无人机本身悬停精度的影响可能存在一定的误差,将其称为位置扰动。假设第i个AIRS的坐标为由于悬停位置存在误差,故其真实位置为其中,和表示位置误差,均服从[0,r]内的均匀分布,r表示位置扰动系数。进行1 000次随机实验,为了研究位置扰动的影响,每次实验中莱斯因子取固定的值,同时,为了反映复杂地形条件,差异化设置各个AIRS级联信道的莱斯因子的取值,具体为κ1=0 dB,κ2=10 dB,κ3=10 dB,κ4=20 dB,κ5=20 dB,κ6=30 dB。本文分别研究了不同的扰动条件下所提算法的性能。如图7所示,对于每一个扰动系数的取值,对比了AIRS选择算法和不进行AIRS选择两种方案的性能。可以看到所提算法的性能要好于不做选择方案。因此在位置扰动条件下,所提算法可以提升目标点定位性能。
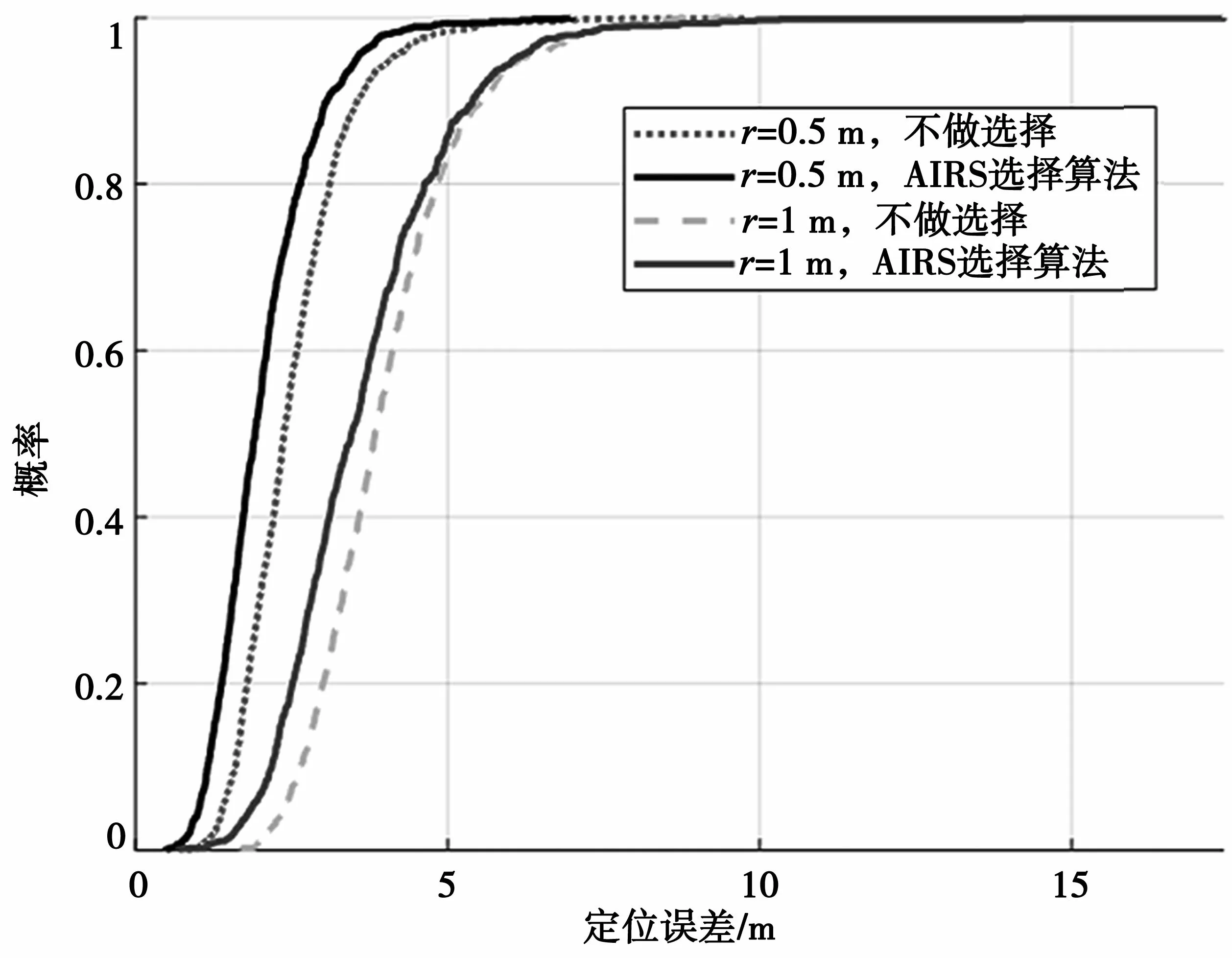
图7 定位误差概率
4 结语
IRS辅助下的无线通信系统将凭借低能耗、易部署等优势成为未来的一项关键技术,对传统定位技术也将带来意想不到的影响。本文在现有研究基础上提出多AIRS联合辅助定位策略,主要针对IRS的选择进行分析,从而达到提高定位精度的目的。目前IRS辅助下的定位技术研究成果很少,距离此项技术的成熟还有较大距离,因此如何真正将其合理应用,实现定位的智能化,还有待更加深入的研究与实践探索。
