基于改进细菌觅食优化算法的遥感图像增强研究
2022-07-10于敏
于 敏
(永城职业学院,河南 永城 476600)
1 引 言
遥感图像受传感器和环境等因素的影响,会存在一些干扰和噪声,易使图像出现对比度、色彩失真、模糊等降质现象,因此通过图像增强可最大程度减少图像模糊性,提高遥感图像的清晰度,从而获得遥感图像的细节信息[1-2]。
目前遥感图像增强处理算法主要有:直方图均衡化(Histogram Equalization,HE)方法实现简单[3],能够对遥感图像的整体亮度增强,但是由于图像边缘、细节信息集中在图像高频部分,会出现过增强现象,导致高频部分噪声也放大,从而细节信息被淹没。小波变换(Wavelet Transform,WT)能够在保留图像细节信息的同时滤除噪声[4],但是由于仅能捕获图像上有限的方向,易造成方向信息无法全面表示。多尺度 Retinex(Multiscale Retinex,MR)算法能保持遥感图像的颜色恒定[5],但是由于计算每个尺度的高斯模板与原始图像的卷积,如果尺度选择较大则运算量非常大,导致算法效率较低,同时由于多尺度无法把亮度分量从原始图像中完全移除,因此在对比度较高区域易出现光晕现象。非下采样Contourlet变换(NonSubsampled Contourlet Transform,NSCT)方法能有效抑制图像高频区域噪声并把图像轮廓特征显现[6],但如果光照不均匀,增强视觉效果较差。模糊决策算法(Fuzzy Decision Algorithm,FDA)设计简单[7],易于实现,但是模糊依赖度和模糊粗糙度不易选择,使得算法有不收敛的可能。细菌觅食优化(Bacterial Foraging Optimization,BFO)算法对遥感图像的噪声能够抑制[8],但是菌群陷入局部极值,部分细菌发生逃逸现象,导致在应用中不能保持遥感图像的细节及边缘信息。
本文提出改进细菌觅食优化算法对遥感图像增强,图像的低频、高频采用不同的增强方法。实验结果表明,本文算法与其他算法相比较,遥感图像增强效果较清晰,评价指标较优。
2 改进细菌觅食优化算法
2.1 基本细菌觅食优化算法
细菌觅食优化算法主要通过细菌个体之间的趋化、繁殖和迁徙行为进行搜索[9-11]。
假设P(i,j+1,k,l)为第i个细菌在第j次趋化,第k次繁殖以及第l次迁徙时所处的位置,则更新公式为:
(1)
式中,P(i,j+1,k,l)为细菌个体i更新后的位置;C(i)为细菌i的翻转或游动的固定步长;φ(i,j,k,l)为第i个细菌进行翻转时任意方向的向量;Prand(j,k,l)为P(i,j,k,l)的领域范围。
2.2 改进过程
2.2.1 基于双sigmoid型乘积隶属函数的自适应步长
细菌移动固定步长使得收敛速度较慢、精度较低,通过自适应步长使得细菌在寻优过程前期移动步长较大,主要进行全局搜索,以便快速获得最优解;后期移动步长较小,主要进行局部搜索,以便快速获得精确解。双sigmoid型乘积隶属函数的细菌i趋化自适应步长ξi(j)为:
(2)
式中,a1、c1、a2、c2为参数值,本文设置a1=0.2、c1=20、a2=-0.2、c2=180;ψ为初始步长;G为目前细菌的代数。
通过趋化次数j对ξi(j)控制,ξi(j)随趋化次数j的变化过程如图1所示。
从图1可以看出,在开始时刻,ξi(j)随着趋化次数j增大而非线性加速上升,在全局搜索中可加快、扩大搜索空间,有助于提高收敛的速度;当到一定趋化次数之后,进行恒定步长搜索,同时恒定值保持一定的趋化次数,从而使得全局搜索全面细化;到趋化后期,ξi(j)快速减小,细菌搜索区域主要进行局部空间,越到后期速度减小的越快,这样以便获得较为精确的最优解。
2.2.2 基于裂变算法的繁殖更新
为提高种群的多样性,同时加快算法收敛速度,将细菌个体的适应度值按照降序排列,选取某些大适应度值的细菌个体进行裂变繁殖,再生细菌个体按适应度值从小到大的倒序覆盖原小适应度值的细菌个体,相当于对原细菌个体群进行微调。假设细菌i第一次裂变为n个过程为:
(3)
(4)

2.2.3 基于双高斯函数的迁徙更新
阈值Ped迁徙更新,不能依据当前寻优空间的变化而变化,浪费了寻优资源,同时其值难以设定,不一定能够使在局部最优解周围的细菌个体跳出局部最优解,易陷入局部最优解,收敛性较低,迁徙行为重新随机初始化位置会使得细菌个体有一定的概率存在原来局部最优解周围,这样细菌种群的多样性无法得到增加。
为防止算法陷入局部最优,β取值为:
(5)

(6)

(7)

根据中心极限定理,新生成细菌位置差别具有正态分布特性,为使新生个体能够完全逃离原淘汰个体的位置,需要远离原细菌位置的点新生成细菌的概率越高,因此双高斯函数设计为:
(8)

(9)

3 遥感图像增强过程
通过非下采样Contourlet进行多尺度、多方向变换,把待增强遥感图像进行塔形分解,获得一个包含着整体轮廓信息的低频子图像和若干个高频子图像,对低频、高频部分采取不同的增强方法,低频部分对比度提高以便对图像进行平滑处理;高频部分去噪增强突出边缘轮廓,锐化图像。
3.1 不同频带增强
3.1.1 低频子带增强
通过压缩低频图像获得灰度级全局动态范围D(d):
(10)

(11)
式中,Z为像素总数;δ为较小的常数,避免纯黑像素对数计算时数值溢出,也可突出隐藏的边缘细节信息。这样图像低频部分具有很宽的动态范围,对比度获得了提高。
3.1.2 高频子带增强
为了增强图像高频子带的边缘信息和抑制噪声,将高频子带系数非线性调整如下:
(12)
由于高频子带图像边缘细节信息在尺度方向上表现存在差异性,并且系数绝对值较小,需对其通过阈值调整:
(13)

通过非线性增益函数调整:
(14)
式中,c∈(10,50)为增益强度;b∈(0,1)为控制增益函数曲线形状。
从而获得:
(15)

(16)

最终将高频子带系数进行归一化:
(17)
3.2 局部调整对比度
通过图像局部对比度提升可以使图像显示更多的细节信息,由于图像的边缘和细节信息主要集中在对比度相差较大部分,对此部分调整可改善图像的边缘和细节信息[12]。假设图像像素值s(i,j),则定义局部区域是以s(i,j)为中心,窗口大小为(2ζ+1)×(2ζ+1)的区域,ζ为一个整数,局部平均值ζi,j:
(18)
局部方差σi,j:
(19)
(20)
式中,ε为调节因子。
(21)
式中,I∈(0,255)为图像亮度分量的灰度值;P(I)为超过60 %像素数区间的灰度值统计。
当超过60 %像素数区间的灰度值统计小于45时,此时图像较昏暗,ε需要取较大值,以便使得图像亮度变大,增加图像的局部对比度;超过60 %像素数区间的灰度值统计大于190时,此时图像较亮,ε需要取较小值,以便使得图像亮度变小,使图像的局部对比度增加。

(22)
当获得不同频带的增强图像后,通过反变换重构融合,即可获得增加结果。
3.3 细菌适应度函数选择
适应度函数决定细菌算法进化的能力,考虑选择能更全面反映遥感图像信息的适应度函数fFitnss:
(23)
式中,E1为图像信息熵;E2为信噪改变量;E3为图像方差;E4为图像紧致度;E5为图像的像素差别。
fFitnss综合考虑了图像的多个指标,相比单一性指标更能得到较好的图像增强评价标准,fFitnss值越大,图像增强效果越明显。
适应度函数变化率为:
(24)
式中,T+1fFitnss、TfFitnss分别为迭代时T+1、T时刻的适应度函数值。
算法流程:
①输入待增强遥感图像;
②非下采样轮廓波变换对图像划分不同频带,采用不同方法进行频带增强;
③图像频带反变换重构融合;
④对融合图像质量评价,若达到最大进化代数或ΔfFitnss<0.15,进行步骤(5),否则转(2);
⑤输出遥感图像。
4 实验仿真
实验PC配置为CPU3.0 GHz、内存12 GB、IntelH61主板,集成显卡,Matlab7.0实现仿真。对比涉及的算法有HE、WT、MR、NSCT、FDA、BFO、IBFO,为了检验遥感图像增强的效果,选择3副像素大小为512×512的遥感图像。
4.1 图像增强视觉效果
原始图像中的景物整体较暗,对比度低,灰度范围较小,图像的边缘及纹理信息模糊、可视性低。各种算法对图像增强结果如图2所示。

图2 各种算法对图像增强结果
图2(a1)、(a2)、(a3)为输入的模糊遥感图像,图2(b1)、(b2)、(b3)为HE算法增强结果,图2(c1)、(c2)、(c3)为WT算法增强结果,图2(d1)、(d2)、(d3)为WR算法增强结果,图2(e1)、(e2)、(e3)为NSCT算法增强结果,图2(f1)、(f2)、(f3)为FDA算法增强结果,图2(g1)、(g2)、(g3)为BFO算法增强结果,图2(h1)、(h2)、(h3)为本文算法IBFO增强结果,图像的清晰度、亮度较原始模糊图像有了显著的改善,提高了图像的局部对比度,显现了图像的细节信息,获得了较好的视觉效果,如图2(h1)可以看出农田与道路的边界线,图2(h2)可以看出村庄周围的树木界线,图2(h3)可以看出农田与农田之间的田垄线,其他算法增强图像效果较暗而且模糊,清晰度提升不明显,细节信息得不到有效地增强。
4.2 遥感图像增强质量评价指标
采用图像的信息熵、清晰度作为遥感图像增强质量评价指标。图像信息熵En越大则图像中含有的信息量越多,表现的细节越清晰。
(25)
式中,p(g)表示一幅图像中灰度值为g的像素个数与图像中所有像素之比。
图像的清晰度(Definition)也是比较重要的指标,因为清晰度值越大,图像的影纹细节越清晰,能够对地、物目标包含更多的相关信息,方便人员获取到较多的图像信息,也利于发现地、物的细微变化。图像的清晰度计算为:
(26)
式中,ΔIx(i,j)=I(i,j)-I(i-1,j),ΔIy(i,j)=I(i,j)-I(i,j-1),I(i,j),I(i-1,j)和I(i,j-1)分别为图像I在点(i,j),(i-1,j)和(i,j-1)的像素值。
对图2(a1)、(a2)、(a3)各种算法的增强评价指标如图3、4、5所示,每个指标各种算法进行40次实验。
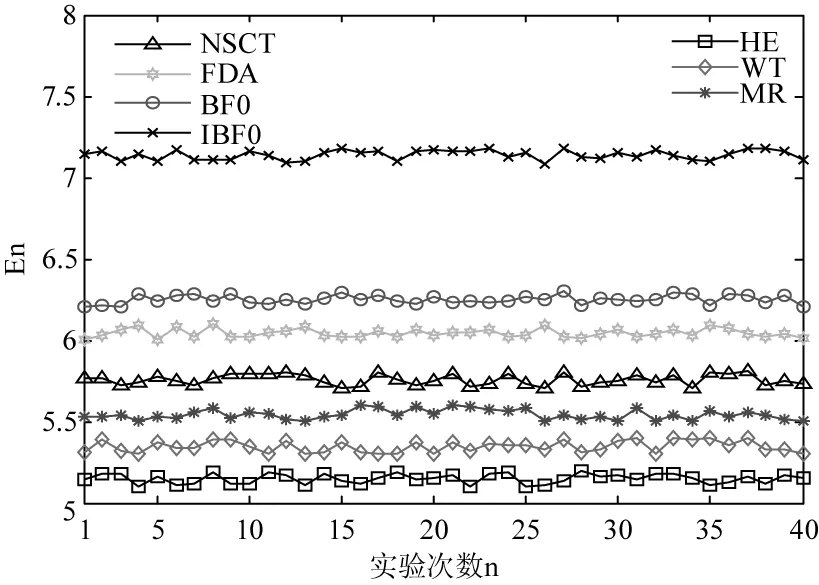
(a) En评价指标
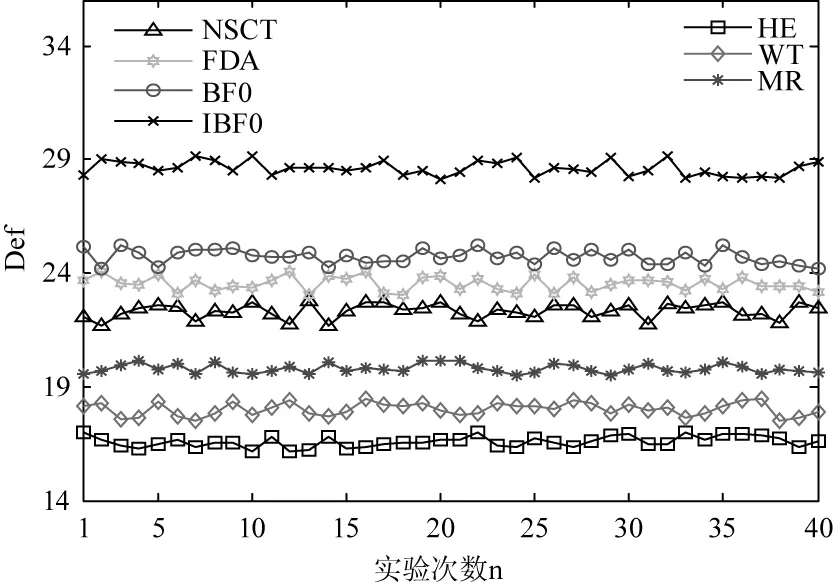
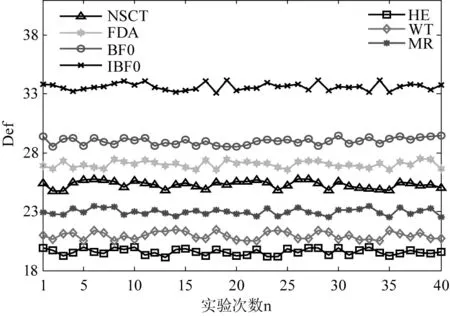
(b) Def评价指标

(a) En评价指标
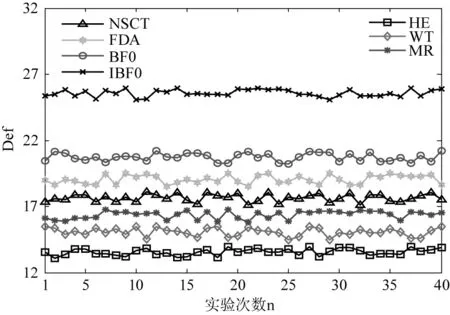
(b) Def评价指标

(a) En评价指标
(b) Def评价指标
从图3可以看出,本文算法IBFO对遥感图像增强评价指标信息熵较大,清晰度显著性提高。如对图2(a1)增强评价指标,本文算法IBFO的En平均值为7.158,HE算法的En平均值为5.004,WT算法的En平均值为5.208,MR算法的En平均值为5.411,NSCT算法的En平均值为5.803,FDA算法的En平均值为6.012,IBFO算法的En平均值为6.257,IBFO相比HE、WT、MR、NSCT、FDA、IBFO分别增加了43.05 %、37.44 %、32.29 %、23.35 %、19.06 %、14.40 %;本文算法IBFO的Def平均值为28.598,HE算法的Def平均值为18.537,WT算法的Def平均值为18.956,MR算法的Def平均值为19.811,NSCT算法的Def平均值为22.456,FDA算法的Def平均值为24.011,IBFO算法的Def平均值为26.671,IBFO相比HE、WT、MR、NSCT、FDA、IBFO分别增加了54.28 %、50.87 %、48.86 %、27.35 %、19.10 %、7.23 %。
5 结 论
本文建立遥感图像增强模型,通过IBFO对图像频带反变换重构融合寻优,实验仿真显示IBFO算法与HE、WT、MR、NSCT、FDA、IBFO算法相比,图像增强结果较清晰,评价指标较优,IBFO算法增强结果能够突出遥感图像细节信息,因此为遥感图像增强提供了一种新思路。
