基于改进蝙蝠算法的激光供能无人机MPPT技术
2022-07-10袁建华赵子玮何宝林
袁建华,王 林,赵子玮,何宝林,刘 宇
(三峡大学电气与新能源学院,湖北 宜昌 443000)
1 引 言
无人机(UAV)是一种无线远程受控的非载人飞行器,具有体积小、成本低、空中操作方便等优点[1]。UAV在军事应用有显著的优越性,如侦察预警、跟踪定位、特种作战、执行搜救等各类战略和战术任务,然而早期的无人机工作时间短,续航能力差,侦察监视区域有限,不能连续获取信息,使无人机在军事应用上受到了很大限制。目前无线能量传输主要有谐振耦合、电场耦合、电磁感应、微波、太阳能和激光六种方式[2]。无人机执行任务时周围一般多有电磁干扰,利用太阳能供能无人机受天气影响较大,如阴雨雾霾、昼夜交替等。激光能量密度高、传输功率大与太阳能相比,激光供能显然受天气因素影响小很多,更适用于无人机上光伏电池板能量的接收,由此关于无人机激光供能的相关概念被提出。目前许多研究人员都致力于研究改善无人机激光供能技术。文献[3]设计了一套给无人机充电的太阳能无线充电装置,并对装置的充电效率进行了测试,确定了无线充电装置的最优参数设定;文献[4]通过分析激光跟瞄系统的模型,对可能产生影响的误差因素进行了分析并进行了误差分配,为后续无人机激光无线充电提供了理论参考;文献[5]对无人机激光充电系统的构成及工作过程和原理进行了阐述,并对后续的研究进行了一定的方向指导;文献[6]针对无人机光伏接收器应满足的条件,并在其五个主要因素方面进行了分析,为无人机无线供能系统中光伏接收器的研究提供了前提。以上文献均是关于无人机无线充电系统的基础理论研究,但是关于激光供能无人机效率问题还鲜有研究,本文针对激光供能无人机时最大功率点追踪的问题,提出了一种改进的蝙蝠算法,以快速追踪最大功率,改善了追踪的快速性和稳定性。
2 激光无线供能系统构成
无人机激光无线供能系统由激光发射系统和激光接收系统构成。其中激光发射系统由电源、激光发射器、能量传输路径、跟踪瞄准装置等构成;激光接收系统由光伏电池板,储能装置等构成[7]。系统工作原理为:跟踪瞄准装置确定无人机的空间位置并给激光发射器发射指令,激光发射器沿指定的能量传输路径发射激光,光伏电池板接收发射的激光并将光能转化为电能,一部分用于无人机的现时工作,一部分传送到储能装置中以供无人机的长时续航。

图1 激光无线供能系统框图
3 光伏阵列数学模型
光伏电池是将光能转化为电能的一种能量转化装置,其输出特性受温度和光照强度的影响[8],多个光伏电池通过串并联组成光伏阵列,其数学模型如图2所示。
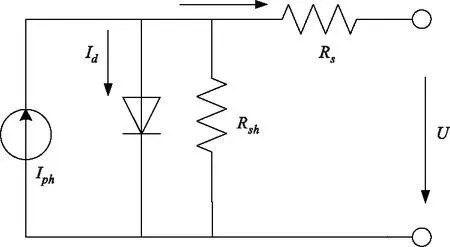
图2 光伏阵列单元等效电路
根据图2知光伏阵列的等效模型[9]为:
(1)
式中,I、U为光伏电池输出电流和电压;Iph为光伏电池光生电流,其值大小受光照强度影响;Id为光伏电池反向饱和电流,其值受温度影响;q为电荷常数,1.6×10-19C;A为二极管理想系数,其值通常在1~2变化;K为玻尔兹曼常数,1.38×10-23J∕K;T为热力学温度;Rs为光伏阵列串联等效电阻。
单个光伏电池产生的电压无法满足无人机的需要,所以无人机上光伏电池板都是多个光伏电池串并联组成的,故光伏电池阵列输出特性方程为:
(2)
式中,np,ns分别为光伏电池并联和串联的数目。
光伏阵列为非线性电源,并且光照强度对光伏电池板输出特性远大于温度对其的影响。在一定条件下其输出特性曲线随着电压的增大其输出功率先增大后减小,因此输出特性曲线峰值顶点即为最大输出功率。
当光伏电池板受外界环境影响出现局部阴影时,P-V输出特性曲线更为复杂,其值取决于阴影部分与无阴影部分光照强度之差异[9-10]。为模拟光伏阵列出现局部阴影的情况,本文采用单位光伏阵列不同光照强度的方法,分别为1000 W/m2、8000 W/m2、600 W/m2,此时其光伏阵列P-V输出特性曲线为图3,由图可知,当光伏阵列出现局部阴影时,其P-V输出特性曲线会出现多个局部最大值[10-12]。在保证激光最大范围垂直入射到光伏电池板上的情况下,光伏电池阵列的光电转化效率可以通过采用最大功率跟踪算法实现光电转化效率最大。

图3 局部阴影下光伏阵列的P-V特性
4 蝙蝠算法
蝙蝠算法参数简单,准确度高,收敛效果好,可并行处理等[13]。其简要步骤如下:
1) 初始化蝙蝠群体,包括种群规模M,迭代次数N,目标函数f(X),蝙蝠位置xi(i=1,2,…,m),蝙蝠的飞行速度vi,脉冲频率ri,声波频率fi和声波响度Ai;
2) 找出此时种群中最佳蝙蝠个体所处位置X*;
3) 对第i只蝙蝠的位置和速度进行更新;
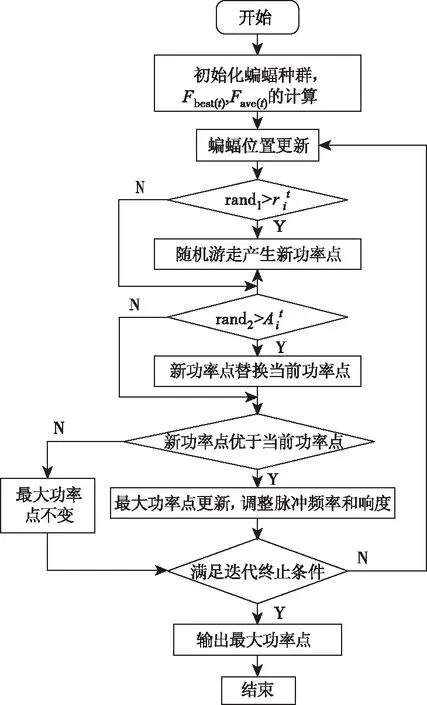
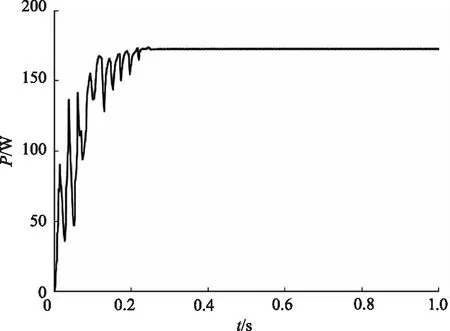
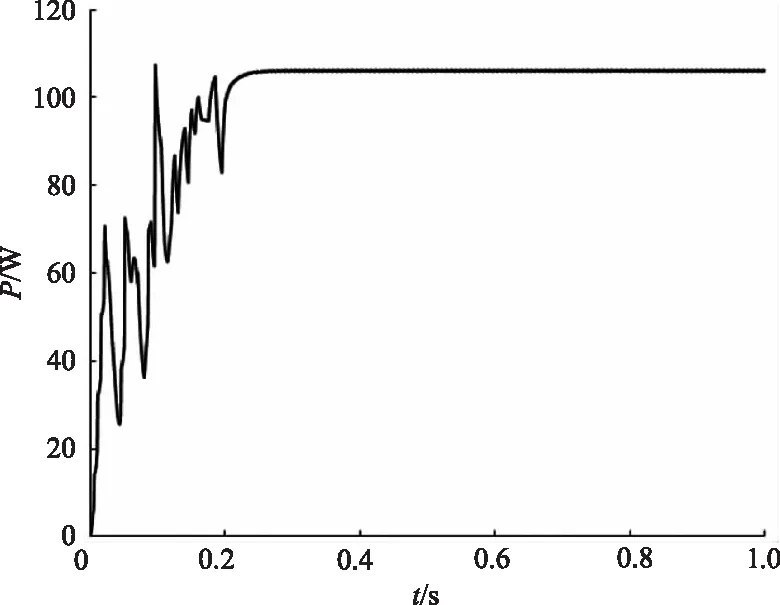
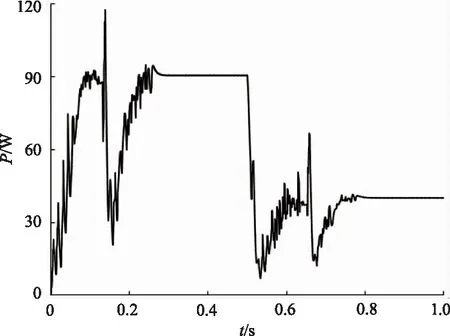
4) 生成随机数rand1,判断rand1 5) 如果在当前最佳解决方案中选择其中一种,新的解使用随机游走方式生成; 6) 生成随机数rand2,其中rand2∈[0,1]为满足随机分配的随机数,判断rand2 7) 判断新位置是否优于当前最佳位置,如果不满足条件,则当前最佳位置不变,否则,新位置更换为最佳位置,并执行第8步; 9) 判断是否满足终止迭代条件,如果满足优化搜索结束,否则执行第2步。 传统蝙蝠算法易陷入局部最优,同时算法后期收敛速度不理想,针对蝙蝠算法存在的以上问题做出如下改进。 蝙蝠算法早期采用随机方式进行种群初始化,具有很大的随机性,这使得算法在寻优过程中有陷入局部最优解的可能性。近年来提出反向学习的初始化很好应对了此问题,反向学习利用搜索反向解空间来扩大搜索范围能够有限避免早熟,提高了算法全局寻优的能力[14]。 蝙蝠算法下一次的速度、位置、频率由上一次的结果迭代产生,在算法后期全局最优解处于某一区域并不断迭代,存在过分迭代的现象,影响收敛速度。本文根据随机位置和最优位置进行搜索并不断更新[15],降低局部过分迭代发生的概率。位置更新公式为: xit=ε×(Xit-1+f2t×rand×(best-Xit-1)+ f1t×rand×(prand-Xit-1)) (3) (4) 收缩因子ε的公式为: (5) phi=4×(f1t+f2t) (6) f1t=1-e(-|Fbest(t)-Fave(t)|×rand) (7) f2t=1.1-f1t (8) (9) 响度、脉冲频率计算公式为: (10) (11) 改进的蝙蝠算法在种群分布均匀性及追踪速度等方面有了明显,算法具体步骤如下: 1) 关于种群规模M、初始响度A0、声波频率f1t、f2t、目标函数f(x)等初始值的设定; 2) 基于反向学习进行种群的初始化,蝙蝠初始位置为x0,搜索蝙蝠种群中最佳蝙蝠所处的位置best,计算其适应度值Fbest(t),同时计算蝙蝠种群平均适应度值Fave(t); 7) 计算所有蝙蝠适应度值并进行排列评估,最佳蝙蝠所处位置即最优解; 8) 判断是否满足终止迭代条件,如果满足条件则搜索结束,否则返回第3步。 图4 改进蝙蝠算法流程图 在Matlab/Simulink中进行仿真验证本文所提算法的有效性,以蝙蝠算法与本文改进蝙蝠算法对最大功率跟踪时间t及目标函数P=UI进行对比,使用Boost升压电路,光伏阵列处于温度T=25 ℃、光照强度E=1000 W/m2、开路电压UOC=22 V、短路电流ISC=7.6 A,仿真模型如图5所示[8]。 图5 基于Boost电路的MPPT控制系统框图 算法参数的设置对收敛速度及全局搜索能力有较显著影响。种群规模较大时,算法以较大可能性搜索全局最优解,种群规模较小时,算法在短时间很难收敛到全局最优解;在算法迭代前期,f1t比f2t大,倾向于追新部分学习,同时脉冲响度A值一般较大,此设置提高了算法全局搜索能力;在算法后期局部搜索时,f2t比f1t大,倾向于选择已有的最优解,脉冲响度A值一般较小,共同保证了算法局部搜索能力。基于以上参数特性为提高算法收敛的速度性和稳定性并进行多次实验确定算法初始值如下:M=170,A0=1,f10=80,f20=30,P0=0。 改进蝙蝠算法满足以下两者其一则迭代终止:第一,算法总迭代次数达到最大迭代次数,本算法设定最大迭代次数N=100;第二,连续无效迭代次数达到总迭代次数的1/3,当多次无效迭代时说明收敛速度很慢或目标丢失,则迭代终止。 当光伏阵列处于温度T=25 ℃、光照强度E=1000 W/m2时,此时光伏阵列有一个极大值点,图6和图7分别为采用蝙蝠算法和改进蝙蝠算法进行的最大功率追踪,由图可知,采用蝙蝠算法追踪到最大功率点所用时间t=0.22 s,最大功率P=172.5 W;改进蝙蝠算法追踪到最大功率点所用时间t=0.15 s,最大功率P=173.6 W。改进后的蝙蝠算法追踪到最大功率点时间缩短且功率波动较小,系统振荡幅度降低。 当温度T=25 ℃、光伏阵列平均划分三个区域分别处于光照强度E=1000 W/m2、500 W/m2、300 W/m2时,采用蝙蝠算法和改进蝙蝠算法进行最大功率追踪,由图8和图9可知在局部阴影情况下,蝙蝠算法追踪到最大功率点所用时间t=0.23 s,最大功率P=104.2 W;改进蝙蝠算法追踪到最大功率点所用时间t=0.13 s,最大功率P=105.7 W,改进的蝙蝠算法在快速性和稳定性有了明显改善。 图6 光照均匀下蝙蝠算法仿真结果 图7 光照均匀下改进蝙蝠算法仿真结果 图8 局部阴影下蝙蝠算法仿真结果 针对外界环境出现变化的情况,本文设定当t=0 s时,光照强度E=[600,600,600]W/m2;t=0.5 s时,光照强度E=[300,300,300]W/m2,采用蝙蝠算法与改进蝙蝠算法的进行对比仿真。由图10和图11可知蝙蝠算法在外界环境变化时追踪到首次最大功率点所用时间t=0.26 s,最大功率点P=90.3 W,t=0.5 s时光照变化,t=0.77 s时再次追踪到最大功率点,P=39.8 W;改进蝙蝠算法在外界环境变化时追踪到首次最大功率点所用时间t=0.15 s,最大功率点P=90.8 W,t=0.5 s时光照变化,t=0.63时再次追踪到最大功率点P=41.2 W。 图9 局部阴影下改进蝙蝠算法仿真结果 图10 环境动态变化时蝙蝠算法仿真结果 图11 环境动态变化时改进蝙蝠算法仿真结果 本文针对激光供能无人机过程中传统算法收敛速度慢、易陷入局部最优等问题,提出了改进的蝙蝠算法,通过在蝙蝠算法中引入反向学习及收缩因子进行位置更新,优化种群并加快收敛速度。最后通过仿真结果证明改进蝙蝠算法光伏电池板局部遮荫和外界环境动态变化情况下跟踪速度更快、振幅更小,为不同环境下激光供能无人机的效率提供了保障。
5 改进蝙蝠算法及其在激光供能无人机MPPT技术中的应用
5.1 基于反向学习策略的初始化阶段
5.2 引入收缩因子的位置更新



6 仿真及分析

6.1 光照均匀下最大功率追踪
6.2 局部阴影下最大功率追踪

6.3 外界环境动态变化情况下最大功率追踪


7 结 论
