一种用于激光雷达的微振镜设计
2022-07-10陆英
陆 英
(徐州工业职业技术学院机电工程学院,江苏 徐州 221140)
1 引 言
随着5G技术的不断发展,自动驾驶技术的迎来了新一轮的发展热潮,已成为当今世界的科学技术焦点之一,无线雷达、毫米波雷达和激光雷达是自动驾驶中提供反馈的重要传感器装置[1-3]。其中激光雷达由于其高的探测分辨率和快速的响应成为自动驾驶汽车在100 km/h车速运动下的必备[4-5]。在ICVCTO峰会上华为全球首发了96线符合车规级具备量产能力的激光雷达产品,北汽极狐HBT成为首个搭载华为量产激光雷达的车型。
激光雷达主要分为机械型和固态型。机械型由于体积大价格昂贵已逐渐被固态型取代[6-8],固态型激光雷达又分为MEMS型和相控阵型,相控阵型被认为是最理想的激光雷达产品,具有无机械部件和精度高的优点,但当前由于技术成熟度和价格等原因还不能量产,所以当前研究的热点集中在MEMS型激光雷达上。MEMS型激光雷达的扫描机构为可旋转的MEMS振镜,体积小集成度高[9]。文献[10]设计了MEMS和阵列APD组成的激光雷达,探测距离20 m,测距精度40 cm。但当前MEMS的制造工艺使其MEMS镜面的有效通光口径有限,最大的仅为7 mm,这制约了激光雷达的探测距离[11-13]。
为了进一步提升激光雷达探测距离,扩大扫描振镜通光口径,本文设计了基于电磁式的12 mm直径的激光振镜,提出了“工形”的机械结构方案,并利用Nastran软件进行了力学仿真分析,一阶模态为304 Hz,并搭建试验平台测试了微振镜的偏转角度和谐振频率等性能。实验结果表明:激光微振镜的一阶谐振频率为298 Hz,与仿真结果相比误差为2 %,最大偏转角度为8.12°。
2 微振镜激光雷达系统
微振镜激光雷达系统主要分为激光发射端,激光接收端,光束扫描端和 MCU 控制端四个部分,如图1所示。
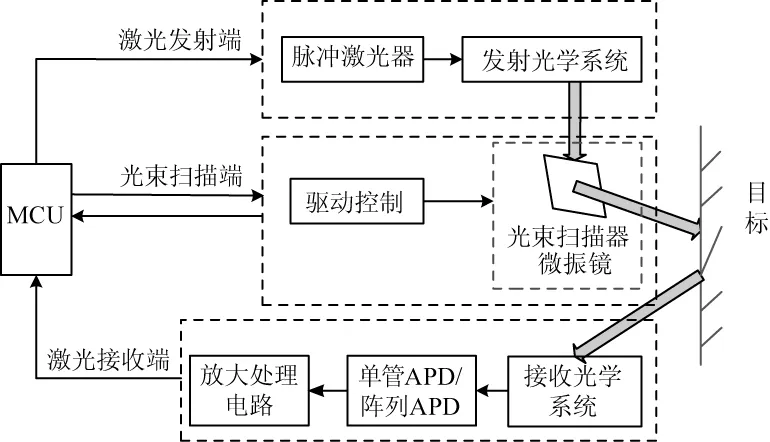
图1 微振镜激光雷达原理框图
在激光发射端,主要包括脉冲激光器和发射光学系统,脉冲激光器负责发射Barker脉冲序列,发射光学系统一般选用激光二极管配合激光准直光学系统来完成,实现mrad量级的发散角要求。在激光接收端,主要包括接收光学系统,单管APD/APD阵列和放大处理电路。接收光学系统一般采用鱼眼透镜以增大接收光学视场,光信号经过APD接收通过一系列电流放大和电压放大处理,提供给MCU,以进行每个点的测距处理。光束扫描端主要包括光束扫描微振镜和驱动控制,MCU通过电机驱动控制激光微振镜进行扫描,从而扩大激光雷达视场,达到多线束的目的。MCU控制微振镜扫描和APD采集进行协同工作,最终形成3D点云文件,实时确定目标形状及位置[14-15],如图2所示。

图2 典型激光雷达3D点云图像
3 电磁式微振镜设计
3.1 机械机构设计及理论分析
电磁式微振镜是利用法拉第电磁感应定律设计而成的,主要分为四个部分,包括发射镜、金属弹片、线圈和磁钢,如图3所示。通过给线圈供电,产生电磁力的激励,使镜子发生偏转,MCU产生特定频率的正弦信号使金属振片带着反射镜负载工作在谐振状态,从而实现光束扫描的功能。
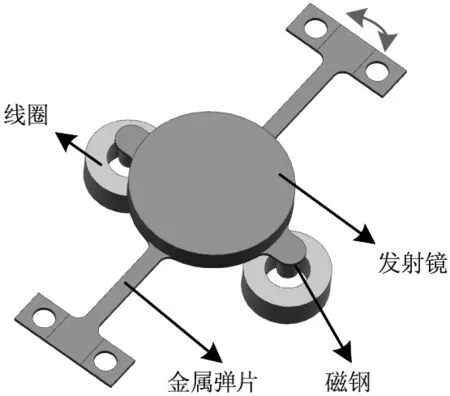
图3 电磁式微振镜机械设计
当微振镜系统发生角度θ偏转时,反射镜以金属振片中心轴为转动轴开始转动,系统的力矩平衡方程如下:

(1)
其中,I为振镜的转动惯量;D为阻尼系数;K为扭转刚度;M为线圈与磁铁产生的扭转力矩。
振镜主要包括K9玻璃反射镜、金属振片和磁钢,它们共同作用产生的转动惯量可以写做:
(2)
其中,ρs,Rs和ts为玻璃反射镜的密度、半径和厚度;ρm,Rm和tm为金属振片的密度、宽度和厚度;ρc,Rc和tc为磁钢的密度、半径和厚度。扭转刚度K可以表示为:
(3)
当微振镜绕轴做机械谐振时,谐振频率为:
(4)
反射镜能够偏转的最大角度可以估计为:
(5)
其中,ξ为阻尼系数,在这里我们按照空气阻尼模型计算,阻尼系数为0.0011。因此所需的力矩M为:
M=θ(ωn)·2ξI
(6)
其中,M=F·L,F为安培力;L为力的作用距离。
F=kNBIL
(7)
其中,N为线圈匝数;B为磁感应强度;L为每匝线圈在磁场中的有效长度;k为常数,通过更换线圈和磁铁来实现。
3.2 激光振镜机械仿真
利用Nastran进行有限元仿真,微振镜系统各元件尺寸和材料参数如表1和表2所示。
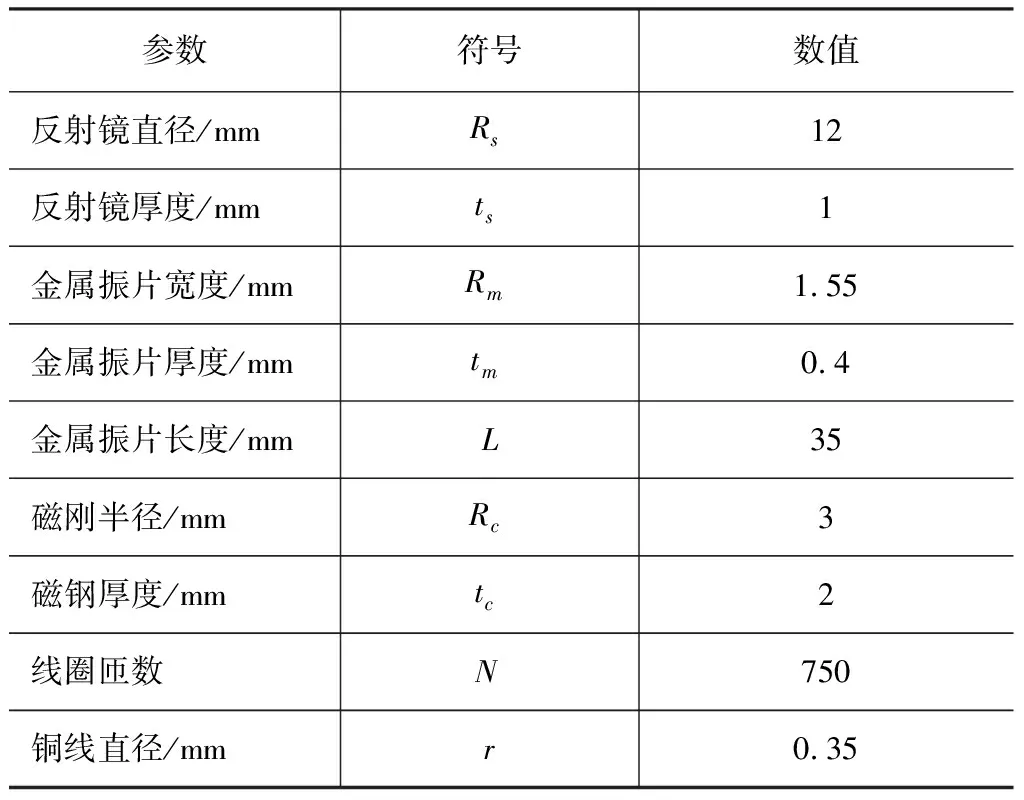
表1 微振镜系统尺寸参数表
表2 微振镜系统材料参数表
将上述尺寸参数和材料参数代入到Nastran进行网格绘制并有限元计算,得到的模态振型及频率如图4所示。
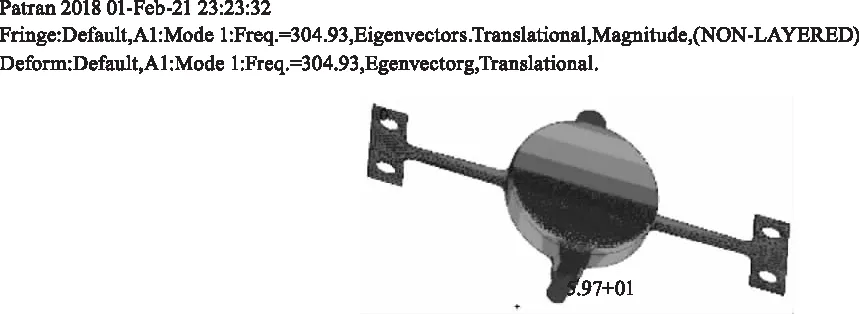
(a)
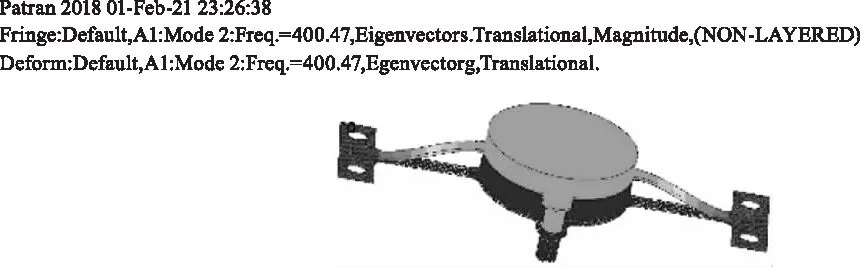
(b)

(c)
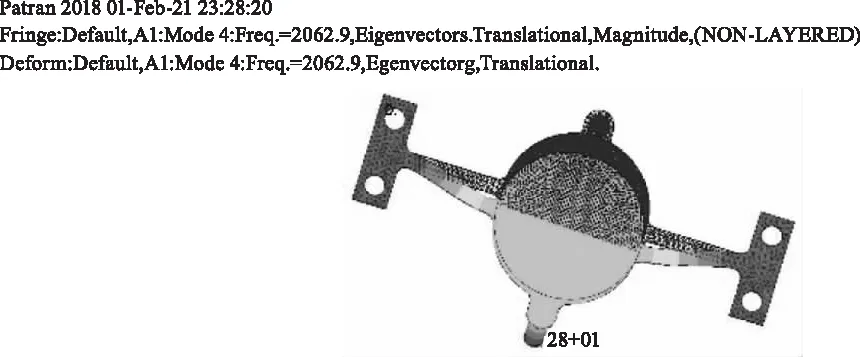
(d)
从上面的仿真结果可以看出一阶模态为304.93 Hz,二阶模态为400.47 Hz,三阶模态为1371.8 Hz,四阶模态为2062.9 Hz。一阶模态和二阶模态有约96 Hz的频率裕量,因此振镜在1阶模态频率上稳定工作。
4 测试试验及结果分析
根据表1和表2的参数机械加工激光微振镜实物如图5所示。

图5 激光微振镜实物图
4.1 谐振频率测试
利用扫频法可以得到微振镜的一阶模态频率,即通过给线圈施加从1~500 Hz的正弦信号,测量振镜的转角大小变化。如图6所示即为不同频率下振镜的摆动幅度变化,在298 Hz出达到峰值,与仿真结果304 Hz基本符合,误差为2.0 %,验证了仿真的正确性和可行性。

图6 激光微振镜谐振频率测试图
4.2 偏转角度测试
利用加工好的激光微振镜搭建如图7所示的实验平台。激光器发出一束准直光束,通过激光微振镜进行扫描,在一定距离下放置坐标纸,通过读取坐标纸的长度计算振镜的最大偏转角度。

图7 实验平台示意图
镜子偏转的角度可用如下公式进行计算:
(8)
其中,m为激光微振镜到坐标纸的距离;l为光束在坐标纸上的距离,示意图如图8所示。
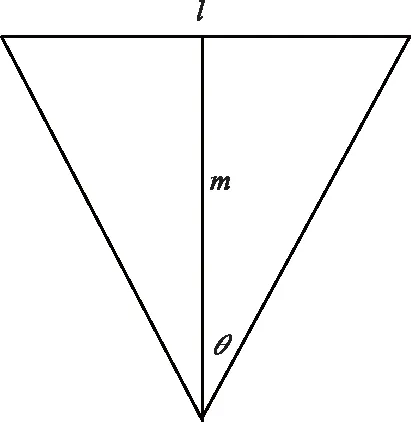
图8 角度计算示意图
实际测量中测得激光微振镜到坐标纸的距离为900 mm,光束在坐标纸上的距离为256.8 mm。因此计算得到镜子偏转角度为8.12°,如图9所示。
图9 角度范围测试图
在测试角度范围的同时,也测试的微振镜的角度精度,因为微振镜一直处于谐振状态,本文测试了最大角度的角度精度,角度精度优于0.005°。
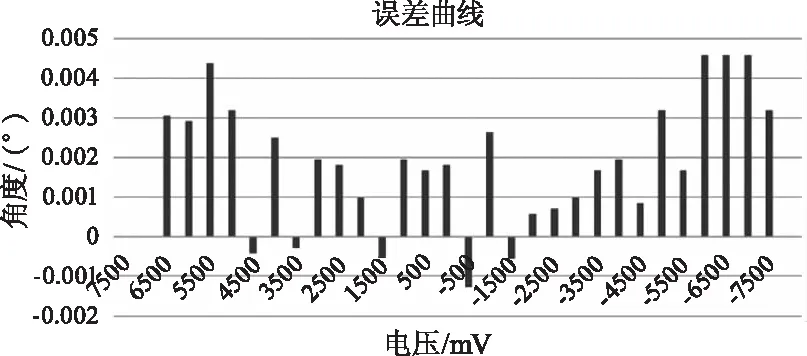
图10 角度精度测试图
本文设计的微振镜的反射镜尺寸达12 mm,比传统的MEMS振镜负载反射镜约大2倍,所能接收到的能量是MEMS式激光雷达的4倍,因此在不改变激光光源和探测器的条件下,本文所设计的电磁式微振镜的激光雷达系统的探测距离约为MEMS式激光雷达的4倍。
5 结 论
为适应当前车载激光雷达领域对探测距离的要求,本文设计了一种基于电磁式的激光振镜,振镜采用“工形”的机械结构方案,利用Nastran软件进行了力学仿真分析,一阶模态为304 Hz,并搭建试验平台测试了微振镜的偏转角度和谐振频率性能。实验结果表明:激光微振镜的一阶谐振频率为298 Hz,误差约为2 %,最大偏转角度为8.12°。对车载激光雷达扩大探测距离提供一种可行性方案。
