北斗星间链路系统全球通信保障效能分析
2022-07-08李申阳王海涛张佳培田广宇于雪晖
李申阳,王海涛,张佳培,田广宇,于雪晖
(1.航天恒星科技有限公司,北京 100091;2.东方红卫星移动通信有限公司,北京 100086)
文中对我国当前主要天基通信保障系统进行通信效能分析,以解决机载、星载、船载、车载等通信终端在全球范围内不间断通信的问题。文献[1-9]提出利用北斗导航卫星(BeiDou Navigation Satellites,BDS)的全球覆盖能力实现全球范围内任意两点之间的测控通信服务,北斗导航卫星可用的天基测控资源有星间链路、全球短报文等[1-9],文中使用STK(System Toolkit)建立基于BDS 星间链路系统的典型应用场景,并进行通信保障效能分析,主要包括覆盖能力、通信效能、任务时效性等指标。在BDS开通全球服务背景下,文中分析结果可作为BDS应用的参考。
1 概述
随着我国基础通信资源的发展,基于天基通信保障系统的使用需求剧增。我国现有的天基通信保障系统主要有天链卫星、天通卫星、北斗导航卫星(BDS)等。
对3 种卫星覆盖范围进行分析可知,天链卫星在南北极和西经部分区域(美国中东部地区)存在通信盲区,部分途径北极的航线是最短路线,而通信盲区的存在使航迹需重新规划,导致规划更为复杂[10];天通卫星覆盖范围主要是亚太地区,航迹覆盖范围较小。只有BDS 可实现全球覆盖,并实现全球范围内任意两点之间的测控通信服务。BDS 对于天基全球通信保障的重要性是不言而喻的,文中基于BDS星间链路系统开展通信保障效能分析。
2 北斗系统星间链路建设情况
2020 年7 月31日,北斗卫星导航系统正式开通,提供全球服务。BDS 由30 颗中高轨卫星组成,包括24 颗中轨道卫星(Middle Earth Orbit,MEO)、3 颗静止地球轨道卫星(Geostationary Earth Orbit,GEO)及3 颗倾斜地球同步轨道卫星(Inclined GeoSynchronous Orbit,IGSO),卫星均装载星间链路系统。基于星间链路技术实现卫星间数据传输,避免了大量的境外测控站、海上测量船建设的需求,基于BDS 可实现全球范围内准实时数据传输服务。
BDS 星间链路系统采用Ka 频段,时分双工(Time Division Duplexing,TDD)体制,可通过星间链路系统与临近空间飞行器以及高、中、低轨卫星或境外部队用户进行双向通信,以卫星多跳通信方式将数据回传至境内或将指令及时下达至目标。下文对BDS 星间链路系统的通信保障效能进行详细分析。
3 星间链路全球通信保障效能
3.1 应用场景
使用STK 软件建立BDS,搭建星地、星间链路,模拟基于BDS 星间链路系统与用户的通信场景。典型应用场景有3个,分别是中国地面站与临近空间飞行器、中国地面站与低轨卫星、指挥中心与维和部队[11]。
场景1:中国地面站与临近空间飞行器
中国地面站到北美之间的临近空间飞行器航迹经过北纬81°,可通过BDS 星间链路系统保障飞行全程的通信链路不间断。BDS 卫星之间通过星间链路建链,地面站和临近空间飞行器分别与上方北斗卫星通过星地链路建链。如此,经过多跳链路即可实现中国地面站与临近空间飞行器之间的准实时指令控制和遥测数据回传[12]。
场景2:中国地面站与低轨卫星
低轨卫星处于境外时无法及时回传遥测数据或者接收测控指令,只能等到入境后方可与中国地面站进行测控通信。可通过BDS 星间链路系统建立境外低轨卫星与中国地面站之间的双向通信链路,地面站和低轨卫星分别与上方北斗卫星通过星地或星间链路建链。如此,经过多跳链路即可实现中国地面站与低轨卫星之间的准实时测控通信[13]。
场景3:指挥中心与维和部队
选取非洲南部地区作为维和部队驻地,可使用车载终端与中国指挥中心之间通过BDS 星间链路系统建立通信链路,维持实时数据传输。指挥中心和维和部队车载终端分别与上方北斗卫星通过星地链路建链。
3.2 全球覆盖能力分析
使用STK 软件建立仿真模型,对上述3 个应用场景的BDS 覆盖能力、链路可见性进行分析,给出基于BDS 的卫星接力方式[14-15]。
场景1:中国地面站与临近空间飞行器
以中国济南为飞行器起点,以北美洲某地区为飞行器终点,建立飞行轨迹模型,与BDS 建立通信链路。经分析,BDS 可覆盖临近空间飞行器的整个飞行轨迹,飞行全程可见卫星数量3 颗以上,如图1 所示。在仿真场景中可依次选择MEO25、MEO24、MEO23 卫星作为地面站与飞行器之间的转发卫星,以使飞行器飞行全程可见[16]。

图1 可见卫星数量(临近空间飞行器)
场景2:中国地面站与低轨卫星
以轨道高度1 100 km、倾角45°、升交点赤经0°作为轨道参数建立低轨卫星(Low Earth Orbit,LEO)模型,并与BDS建立通信链路。经分析,BDS可覆盖低轨卫星整个交点周期,可见北斗导航卫星数量在3颗以上,如图2 所示,可做到通信链路无中断。在仿真场景中,可选择MEO32、MEO15 作为地面站与低轨卫星之间的转发卫星,以满足低轨卫星的境外测控需求。

图2 可见卫星数量(低轨卫星)
场景3:指挥中心与维和部队
选择中国济南作为指挥中心,南非作为维和部队所在地,建立STK 仿真模型,两地分别与BDS 建立通信链路。经分析,BDS 可覆盖指挥中心与维和部队,指挥中心可见卫星数量在8 颗以上,维和部队可见卫星数量在5 颗以上(见图3)。在仿真场景中,可依次选择MEO26、MEO31 卫星作为建链目标,以满足指挥中心与维和部队间的双向通信。

图3 可见卫星数量(维和部队)
3.3 姿态调整适应性分析
对于高机动性用户,比如临近空间飞行器,在飞行过程中可能会进行姿态调整。偏航角变化不会影响当前通信链路,滚动角和俯仰角变化可能会对飞行器与当前卫星通信链路产生影响。基于场景1,分别对无姿态调整、滚动角90°和俯仰角90° 3 种场景进行仿真分析。
3.3.1 无姿态调整
以3.2 节临近空间飞行器应用场景建立STK 仿真模型,无姿态调整情况下可见卫星数量为2~10颗,如图4 所示。

图4 可见卫星数量(无姿态调整)
3.3.2 滚动角90°
当飞行器滚动角为90°时,建立STK 仿真模型,可见卫星数量为5~8颗,如图5 所示。

图5 可见卫星数量(滚动角90°)
3.3.3 俯仰角90°
当飞行器俯仰角为90°时,建立STK 仿真模型,可见卫星数量为2~6颗,如图6 所示。

图6 可见卫星数量(俯仰90°)
3.3.4 切星方案
使用STK 对飞行器姿态变化引起的可见卫星情况进行分析。在飞行过程中姿态角度调整过大会出现当前可见卫星全部变为不可见的情况,所以需要重新选择卫星建立通信链路。
分别选济南、坐标位置(87.44°N,137.80°W)和纽约3 个位置对不同姿态调整情况下的卫星可见情况进行分析,如表1 所示。由表1 可知,在无姿态调整、滚动角90°和俯仰角90°时,存在无共同可见卫星的问题,姿态调整前后无法与天线波束覆盖范围内的同一卫星保持通信链路。
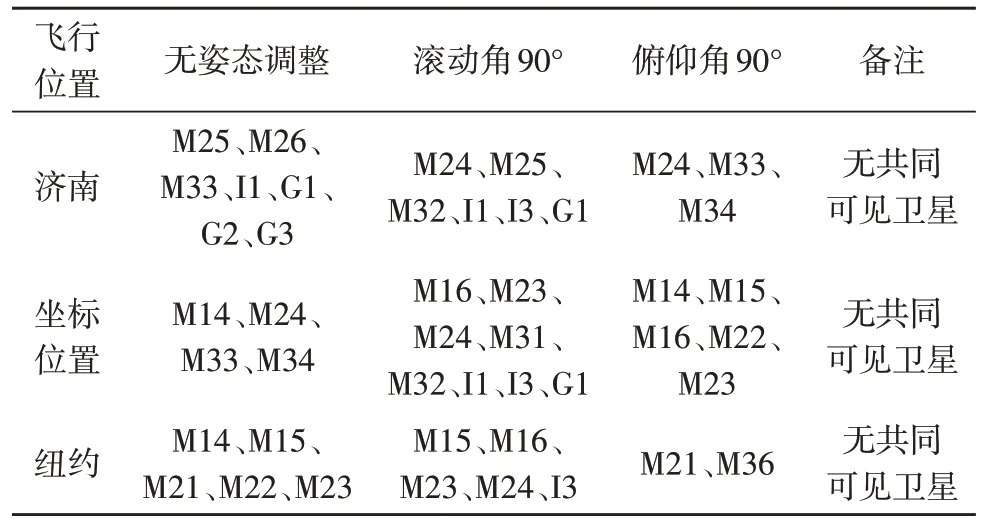
表1 不同姿态调整情况下卫星可见情况
对于飞行器姿态调整前后无共同可见卫星的情况,制定切星方案,如下:
1)将空域卫星划分为主用卫星与备用卫星;
2)主用卫星在飞行器天线波束覆盖范围内可用;
3)主用卫星超出飞行器天线波束覆盖范围时选用备用卫星。
在飞行器飞行过程中,卫星切换流程如下:姿态未调整时,天线波束覆盖正上方区域,该区域内的卫星为主用卫星,左右两侧区域内的卫星为备用卫星,若飞行器姿态调整过大,则需重新选择卫星。
当飞行器出现大角度姿态调整时,主、备卫星切换流程如下:
1)规划飞行任务时,将主、备用卫星一同放入规划范围内,将主、备用卫星及飞行器的相关路由表和时隙表分别上注或装订至卫星及飞行器;
2)在飞行器正常飞行过程中,通过主用卫星建立通信链路,备用卫星天线波束全程指向飞行器,处于侦听状态;
3)出于机动需要,飞行器出现大角度姿态调整时,若飞行器终端根据自身姿态及位置的实时信息计算出主用卫星超出波束覆盖范围,则根据备用卫星及自身的信息计算并确定可接入的备用卫星,通过备用卫星回传遥测(选择对应卫星的时隙表和路由表)、接收控制指令;
4)已建链的备用卫星接收飞行器数据并通过星间链路向地面站传输;
5)地面站判断星间路由变化,后续由新路由向飞行器发送控制指令。
3.4 通信效能分析
分析上行链路和下行链路的载噪比变化,以境外维和部队车载终端为例,分析终端与BDS 之间的双向通信链路的性能。指挥中心至BDS 的上行链路载噪比在47.9~48.8 dBHz 之间,BDS 至维和部队的下行链路载噪比在49.4~50.4 dBHz 之间。
由以上分析结果可知,基于BDS 星间链路系统的天基通信资源可被广泛应用于弹载、星载、车载、船载等测通终端。BDS 星间链路系统可保证终端运行轨迹的全程覆盖,可满足短消息和语音的通信需求。
3.5 任务时效性分析
星间链路系统采用以通信时隙为单位时间的时分双工通信体制,结合以上应用场景,还需多跳链路才可实现测控通信任务。所以基于BDS 星间链路系统的应用会产生一定的通信时延,平均通信时延主要由星间链路固有时延和时隙占比组成。下面对任务时效性开展分析。平均通信时延计算如下:

其中,tISL表示星间链路固有时延,α表示时隙占比。
3.5.1 星间链路固有时延
星间转发时延可通过每跳的转发时延和总转发跳数来评估。星间链路以单个通信时隙完成一次双向信号收发,单跳转发时延为通信时隙时间(thop),与总转发跳数相乘即可得到星间转发时延。以应用场景2 为例,假设需传输1 kbit 数据,信息传输速率为10 kbps,转发2跳,星间链路固有时延估算方法如表2 所示。

表2 星间链路固有时延统计表
表2中,N表示需传输的数据比特;Rb表示信息传输速率;R表示传输距离(不含卫星间距离);c表示光速;Nhop表示转发跳数;thop表示单跳转发时延。
根据表2,对于应用场景2,星间链路固有时延计算为tISL=t1+t2+t3+t4=2thop+353 ms。在不考虑星间转发时延的情况下,星间链路固有时延为353 ms。
3.5.2 时隙占比
BDS 星间链路系统以时隙为通信时间单位,按照路由表规划建立通信链路。为不影响星间链路系统的正常运行,需对通信时隙进行合理分配,通信时隙占比越小,平均通信时延越大。时隙占比对通信时延的影响如表3 所示。

表3 时隙占比对通信时延的影响
基于以上分析,若时隙占比为80%,则平均通信时延T=tISL/0.8=1.25tISL。
4 结束语
相对于我国现有的天链卫星、天通卫星等天基通信保障系统,BDS 有着可全球覆盖的优势。文中以BDS 星间链路系统作为应用背景,对中国地面站与临近空间飞行器、中国地面站与低轨卫星、指挥中心与维和部队3 种典型应用场景建立STK 仿真模型,具体分析了BDS 星间链路系统的通信保障效能,可进一步启发北斗应用,为工程化提供理论指导。