永磁同步电机模糊自适应控制系统的设计
2022-07-08陈国真蒋炯炜
蒋 珚,陈国真,蒋炯炜
(1.上海航天控制技术研究所,上海 201109;2.中国电子科技集团公司第五十八研究所,江苏无锡 214072)
永磁同步电机具有功率密度高、机械特性好、可靠性高等优点,在交流伺服系统中得到了广泛的应用[1-3]。然而,永磁同步电机系统具有非线性、强耦合等特点,采用传统的PID 控制器很难得到满意的控制效果[4-5]。因此,许多学者采用基于矢量控制系统的模糊PI 控制器来实现对永磁同步电机的控制。
文献[6-7]中设计了变论域模糊PID 控制器,但论域调整机构的设计太复杂,限制了其在工程实践中的应用。文献[8-11]中设计了模糊PI 控制器来控制永磁同步电机,但只是对控制算法进行了仿真分析,并未对嵌入式系统的软、硬件进行研究。文献[12]中设计了永磁同步电机硬件电路的控制板,但并未对控制算法进行研究。
文中针对永磁同步电机的模糊自适应控制系统进行了研究,详细阐述了电机控制系统硬件、软件的设计过程,并在嵌入式系统中通过模糊控制算法实现了电机的转速控制。
1 模糊自适应控制系统
1.1 模糊PI控制器
在传统的PI 控制器中,比例和积分的增益值是固定的。但由于永磁同步电机的非线性、强耦合、时变等特性,传统的PI 控制器已无法实现满意的控制效果。如图1 所示,模糊PI 控制器是根据输入的转速误差和其误差变化率,通过模糊运算,对比例和积分的增益进行在线调整的控制策略[13-14]。根据误差e和误差变化率ec的变化,经过模糊运算得到比例和积分增益的变化量,分别与原有的比例和积分增益进行加法运算,得到实时变化的比例和积分增益,从而实现较好的控制效果。

图1 模糊PI控制器
将输入误差e、误差变化率ec、比例增益变化量ΔKp和积分增益变化量ΔKi的论域定义在(-1,1)上,并将其划分为7 档:PB(正大)、PM(正中)、PS(正小)、ZE(零)、NS(负小)、NM(负中)和NB(负大)。文中采用的三角形隶属度函数如图2 所示。
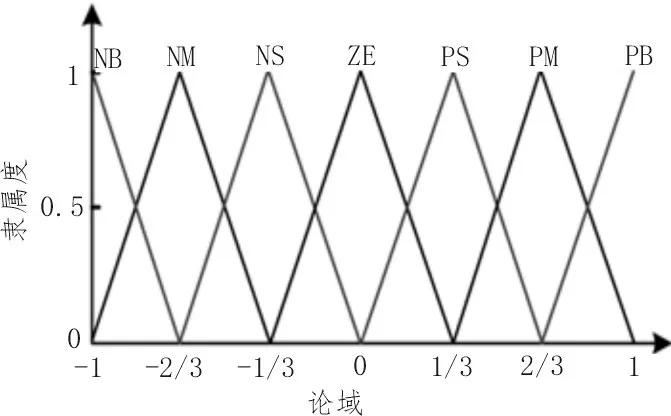
图2 隶属度函数
1.2 模糊规则
模糊规则的优劣对系统的控制性能起着决定性的作用。文中选用误差e和误差变化量ec为模糊控制器的输入,总共有49 个模糊规则。
系统阶跃响应曲线如图3 所示,模糊规则的制定依据如下[15-16]:
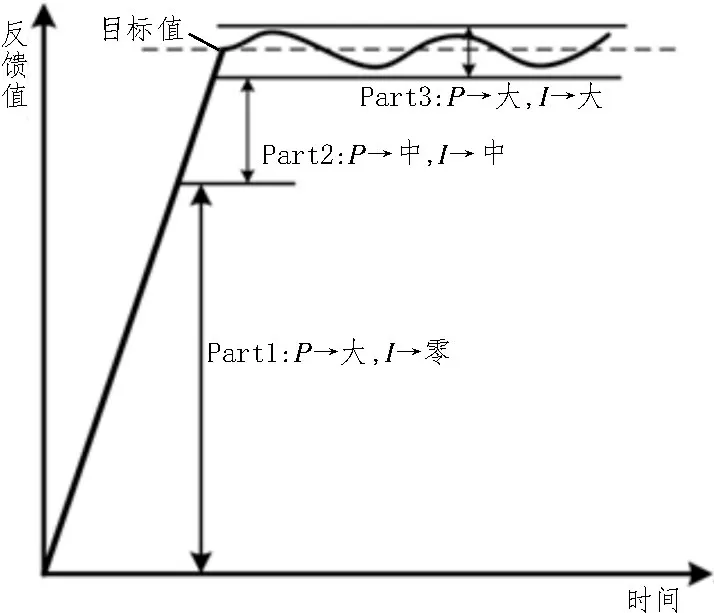
图3 系统阶跃响应
1)在Part1 阶段,系统的误差很大,此时应尽可能的增大比例增益Kp,加快系统的响应速度。同时,由于误差太大,若增加积分环节,很容易发生积分饱和,因此,使积分增益Ki尽可能的趋于零。
2)在Part2 阶段,系统的误差在不断减小,此时,逐渐增加Ki并减小Kp。
3)在Part3 阶段,系统基本处于稳定状态,系统的误差很小。为了消除系统的静差,尽可能的增大Ki。为了加快系统的响应速度,尽可能的增大Kp。
综上所述,ΔKp和ΔKi的模糊规则如表1 和表2所示。

表1 ΔKp模糊规则表

表2 ΔKi模糊规则表
2 硬件电路设计
基于Ti 的DSP 芯片TMS320F28335 设计了永磁同步电机的硬件电路,主要包括IPM(智能功率模块)驱动电路、反馈信号(电流和速度)检测电路和保护电路,其硬件电路框图如图4 所示。

图4 硬件电路框图
2.1 反馈信号检测电路
文中设计的永磁同步电机的闭环控制系统包括电流环和速度环。要实现电机的闭环控制,必须实时监测电机运动时的电流和速度。
文中采用霍尔电流传感器和旋转变压器来获得电机的相电流和速度。如图5 所示,霍尔电流传感器采用LEM 公司生产的LAH 25-NP 型产品,其原边电流与次级补偿电流的线圈比例为2∶1 000。当相电流经过霍尔电流传感器时,在M 端和地端输出相应的电压。根据输出的电压值,并结合线圈比例和采样电阻,即可得到电机的相电流数值。旋转变压器的输出电压随电机的转动而变化,因此,根据旋转变压器的输出电压即可得到电机转动的角度和速度。文中采用ADI 公司生产的AD2S1210 进行旋变数字的解码。AD2S1210 内置可编程正弦波振荡器,可以为旋转变压器提供正弦波激励。

图5 相电流检测电路
2.2 IPM驱动电路
在电机驱动中,要求驱动模块具有较小的导通阻抗和较高的开关频率,因此,常用的驱动元件有IPM、IGBT 和MOSFET。IPM 内部集成了IGBT 及其驱动电路,且包含有过温检测等保护电路,从而在操作不当时可以避免元器件的损坏。文中选用Mitsubishi Electric 公司的PSS20S92F6-AG 型IPM 模块,其内部含有控制端欠压保护、短路保护和温度检测功能。IPM 的输入为控制端的六路PWM 信号,通过控制上、下桥臂的闭合和断开,输出相应的电压信号驱来动电机转动。
2.3 保护电路
母线电流保护电路通过霍尔电流传感器和电压比较器来实现,如图6 所示。当母线电流超过5 A时,电路报错,电机停止转动。

图6 母线电流保护电路
霍尔电流传感器选用南京中旭电子科技有限公司的HNC-15LTS 型产品,其额定测量电流为15 A,额定输出电压为2.5 V±0.625 V。当母线电流经过霍尔电流传感器时,霍尔电流传感器输出相应的电压值Um,并接到变压比较器的正向端,电压比较器负向端的电压值为2.706 V(对应的母线电流为5 A)。当Um的值大于2.706 V时,母线电流大于5 A,电压比较器输出高电平,电路报错,从而实现母线电流的保护。
3 软件程序实现
文中设计的永磁同步电机的闭环控制系统包括速度环和电流环,采用矢量控制方案。根据磁场等效原理,通过Clarke 变换和Park 变换将三相交流电转化为d轴和q轴分量,从而获得类似于直流电机的动态调速性能[17-18]。
在CCS 6.1 提供的开发环境下实现软件程序的运行。软件程序包括主函数和中断函数。
主函数主要是实现系统初始化、外设模块的初始化和控制器参数的初始化,最后进入死循环等待中断程序。中断函数包括速度环的模糊自适应控制算法和电流环的矢量控制算法,如图7 所示。在速度环中,采用模糊PI 控制算法进行闭环控制,其比例和积分的系数根据速度的误差值而实时变化,从而得到更好的控制效果。在电流环中,d轴的参考指令为零,q轴的参考指令为速度环的输出值,分别通过PI 控制算法来实现闭环控制。

图7 中断程序框架
4 仿真分析
采用Matlab 中的Simulink 模块对永磁同步电机系统进行了仿真分析。电机的定子相电阻为0.958 Ω,d轴和q轴的电感分别为5.25 mH 和12 mH,磁链为0.182 7 Wb,电机的极对数为4。仿真框图如图8所示。
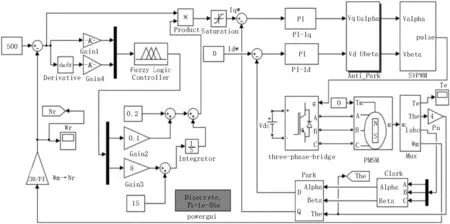
图8 模糊控制仿真框图
当采用传统的PI 控制器时,转速为500 r/min 时的阶跃响应如图9(a)所示,系统会有24.6%的超调,系统达到稳态(2%误差)所需的时间为39.7 ms。
当采用模糊PI 控制器时,转速为500 r/min 时的阶跃响应如图9(b)所示,系统无超调,达到稳态所需的时间为7.6 ms。

图9 阶跃响应仿真曲线
综上所述,采样模糊PI 控制器可以有效的减小系统的超调量,加快系统的响应速度。
5 实验验证
文中搭建了永磁同步电机模糊自适应控制系统的实验平台,电机采用科尔摩根公司的AKM21G 型产品,如图10 所示。采用CCS6.1 作为开发环境,通过C 语言编程实现了模糊自适应控制系统的设计。

图10 电机控制实验平台
在实验中,模糊PI 控制器的初始比例和积分增益值与PI 控制器的比例和积分增益完全相同,实验结果如图11 所示。当采用PI 控制器时,系统会有30%的超调量,当采用模糊PI 控制器时,系统的超调量为9%。因此,采用模糊控制器可以有效地减小系统的超调量,加快系统的响应速度。
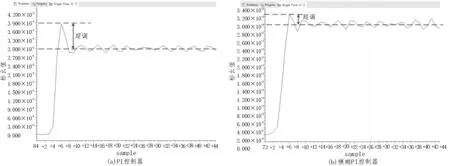
图11 阶跃响应实验
6 结束语
文中基于Ti 的TMS320F28335 控制芯片设计了永磁同步电机的模糊自适应控制系统,并对嵌入式系统中的硬件电路和软件程序的实现过程进行了详细的阐述。模糊控制器通过实时调整控制参数,可以有效降低系统的超调量,从而加快系统的动态响应性能。通过仿真和实验验证了文中设计的模糊自适应控制系统的有效性。