On-board torque management approach to the E-COSM benchmark problem with a prediction-based engine assignment
2022-07-06BoZhangJiangyanZhangFuguoXu
Bo Zhang·Jiangyan Zhang·Fuguo Xu
Abstract This paper proposes an energy management strategy for the benchmark problem of E-COSM 2021 to improve the energy efficiency of hybrid electric vehicles(HEVs)on a road with a slope.We assume that HEVs are in a connected environment with real-time vehicle-to-everything information, including geographic information, vehicle-to-infrastructure information and vehicle-to-vehicle information.The benchmark problem to be solved is based on HEV powertrain control using traffic information to achieve fuel economy improvements while satisfying the constraints of driving safety and travel time. The proposed strategy includes multiple rules and model predictive control(MPC).The rules of this strategy are designed based on external environment information to maintain safe driving and to determine the driving mode.To improve fuel economy,the optimal energy management strategy is primarily considered,and to perform real-time energy management via RHC-based optimization in a connected environment with safety constraints,a key issue is to predict the dynamics of the preceding vehicle during the targeted horizon.Therefore,this paper presents a real-time model-based optimization strategy with learning-based prediction of the vehicle’s future speed. To validate the proposed optimization strategy, a powertrain control simulation platform in a traffic-in-the-loop environment is constructed,and case study results performed on the constructed platform are reported and discussed.
Keywords Hybrid powertrain control·Connected and automated vehicles·Vehicle-to-everything·Benchmark problem
1 Introduction
Compared with conventional internal combustion engine(ICE)-based vehicles, hybrid electric vehicles (HEVs) are considered a prospective type of new energy automobile with the potential to reduce fuel consumption. A typical HEV typically consists of an ICE,an energy storage unit,and an electric motor or motors.The electric motor is an additional power source that can also recover energy via braking,which can improve both engine performance and fuel economy.Both the ICE and the electric motor can provide power either separately or jointly.Therefore,an energy management strategy(EMS)is used to distribute required power between the two energy sources and has been of interest to improve fuel economy[1,2].
To date, EMSs for hybrid powertrains can be classified into two categories:rule-based and optimization-based.EMSs aim to optimize the power split among the energy sources while satisfying driver-required power. The rulebased method is a traditional and simple strategy that is widely used in practice [3]. The primary idea of the rulebased strategy is to adjust the engine operating point at a particular speed to be as close as possible to the optimal efficiency point.The rule-based strategy is commonly designed based on a set of criteria and implemented using deterministic rule-based methods. However, human-dependent experiences and complex traffic conditions restrict extensive applications of rule-based EMSs.Thus,to improve fuel economy and address certain drawbacks, a wide variety of optimization-based EMSs for different types of hybrid powertrain systems have been proposed in recent decades. The dynamic programming(DP)method is a prior application of the EMS to determine a globally optimal solution in a given driving cycle[4].The DP strategy is obtained using a recursive iteration based on the Hamilton-Jacobi-Behrman(HJB)equation, which serves as a general benchmark to evaluate the fuel economy. Among many studies, fuel consumption and dynamics of state of charge(SoC)are two popular factors considered in the cost function [5]. Thus, for practical application,strategies with the ability to optimize in real time have drawn a lot of interest.A commonly used optimization methodisPontryagin’sminimumprinciple(PMP),whichhas been demonstrated to generate an approximate global optimal solution in specific cases [6]. The adaptive equivalent consumption minimization strategy (AECMS) and model predictive control (MPC) are two popular approaches for real-time applications[7,8].The ECMS is similar to the PMP method mentioned above, such that an introduced equivalent factor(EF)is optimized.The ECMS converts the energy optimization problem into an equivalence factor optimization problem, which is a type of instant fuel optimization.The primary challenge for applying ECMS is the estimation of EF.Most studies of the ECMS have focused on adaptive laws to evaluate the EF by online updates.Paganellietal.[9]proposedapowercontrolstrategyforaparallelhybridpowertrain system with the ECMS method,which also considered the battery state of charge. In addition, an RHC scheme,whichisreferredtoasmodelpredictivecontrol(MPC),isalso well known as an efficient strategy to solve the optimization problem over a finite horizon by predicting future system behavior. Many studies have proposed MPC-based strategies;for example,Zhangetal.[10]proposed and developed a nonlinear MPC strategy for parallel HEVs to determine the power-split law.
Conversely, due to the development of communication technology,such as vehicle-to-infrastructure(V2I),vehicleto-vehicle (V2V) communication and connected vehicles techniques,it is possible to share and collect traffic information among the vehicles.It is natural to combine traffic information with powertrain control to improve fuel economy,as reported by Qietal.[11]. Zhangetal.[12] also showed that energy savings for HEVs can be increased by considering external traffic information from V2V and V2I. In addition,Zhangetal.recently developed an MPC-based strategy and used extreme learning machine-based prediction with traffic information considered[13].Reinforcement learning has recently become popular. A deep reinforcement learning method-based EMS that considers road congestion was proposed in [14], and results showed that considering road congestion reduces the total cost of fuel and improves the learning speed.
To actively use traffic information to optimize the energy use of hybrid powertrains,velocity predictions have become increasingly popular.As reported by Kazemietal.[15],many studies have surveyed velocity predictions by considering traffic information and have augmented ECMS to adjust the equivalence factor due to its rapidity and real-time capability.Neural networks(NNs)are loosely modeled algorithms that have been successfully used to make predictions with complex models. In [16], an artificial NN-based method in a time series is used to predict velocity, and the prediction result is applied to an MPC-based energy management problem in a power-split HEV. In [17], the predictive velocity from chained NNs is considered a relevant factor to adjust the equivalent factor for an adaptive ECMS,and results have demonstrated a 0.2-7% predicted fuel economy improvement. Liuetal.[18] devised a reinforcement-learning-based EMS for parallel HEVs with two different velocity prediction methods. Comparative results indicated that the proposed control strategy can be implemented in real time and can save fuel. The vehicle velocity at the intersection also typically varies markedly due to traffic signals, which leads to an unnecessary increase in fuel. Considering this factor,Qietal.[11] developed a co-optimization for plug-in HEVs based on a velocity planning algorithm that considered signal information,and the test results with real urban driving data demonstrated an average of 24% in fuel savings compared to the baseline.
The goal of this study is to propose a real-time energy management strategy design for HEVs in a connected environment that was developed for competition in the 6th IFAC Conference on Engine and Powertrain Control, Simulation and Modeling(E-COSM)2021[19].The primary challenge in solving this problem is to improve the energy economy while maintaining safe driving conditions in an unknown driving cycle with a slope.The primary contributions of this studyareasfollows.First,aplanetarygear(PG)-basedhybrid powertrain model is built based on given information.Then,a rule-based driving strategy is designed to determine the driving mode based on the external traffic information. When a preceding vehicle exists, an MPC-based energy optimal strategy is used to actively consider traffic information.The proposed strategy can be divided into two layers:the upper layer predicts the future speed of the preceding vehicle;and the lower layer provides an optimal power split with the goal of maintaining safe driving and fuel economy.
The remainder of this paper is organized as follows.Section 2 introduces the background of the benchmark problem.Section 2.1 presents the system models used in this study.Then,the control strategy and optimal problem are designed in Section 3.Section 4 presents validations of the proposed strategy and discusses the results. Finally, conclusions are drawn in Section 5.
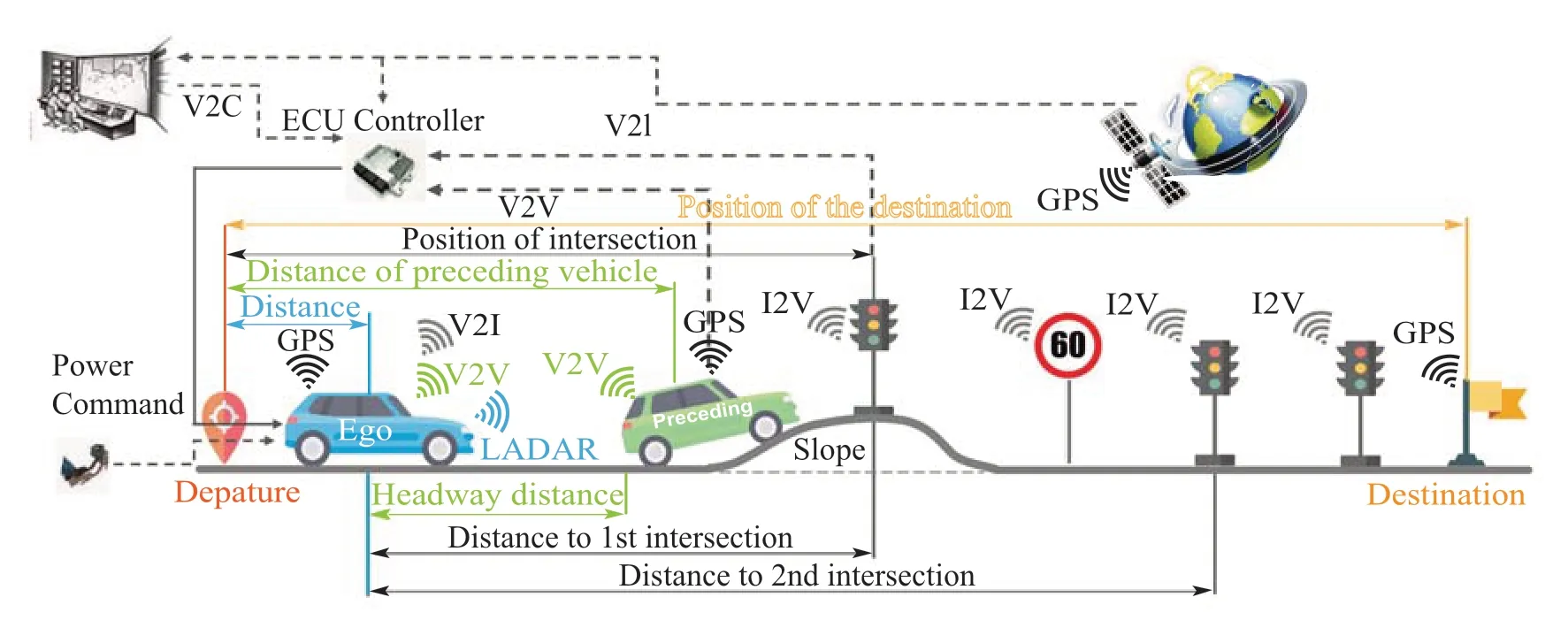
Fig.1 Framework of HEV benchmark problem in connected environment
2 Background and problem formulation
In the IFAC E-COSM 2021,a benchmark challenging problem was proposed with the goal of improving the energy efficiencyofthepowertrainofintelligentconnectedandautomated HEVs. Driving safety was to be considered, and the framework of the vehicles in the connected environment is shown in Fig.1.Connected information,including V2V,V2I V2C and GPS,is available to the vehicle in blue,the route in the benchmark problem is sloped.When the destination and departure are determined, the slope along the route can be known in advance via GPS.There is a preceding vehicle on theroad,andit is assumedthat thereis noovertakingbehavior fortheecovehicle.Thus,thedrivingsafetyfortheecovehicle should be represented by the distance between the preceding vehicle and the eco vehicle,where the preceding information,such as speed and running distance,is obtained through V2V.The maximum speed limitation along the road is also considered in this benchmark problem.For vehicles operating in urban traffic scenarios,traffic lights play an important role in the energy consumption of HEVs.Through V2I connections,the timing and phase of traffic lights are provided to the eco vehicle. As shown in Fig.1,all V2X signals are sent to the ECU.Based on the state of the eco vehicle,the torque commands of the engine, motor, generator and braking system are given to the HEV powertrain to propel or brake the vehicle. The controller designed in this study is coded and run on an ECU to optimize HEV energy efficiency and driving safety.
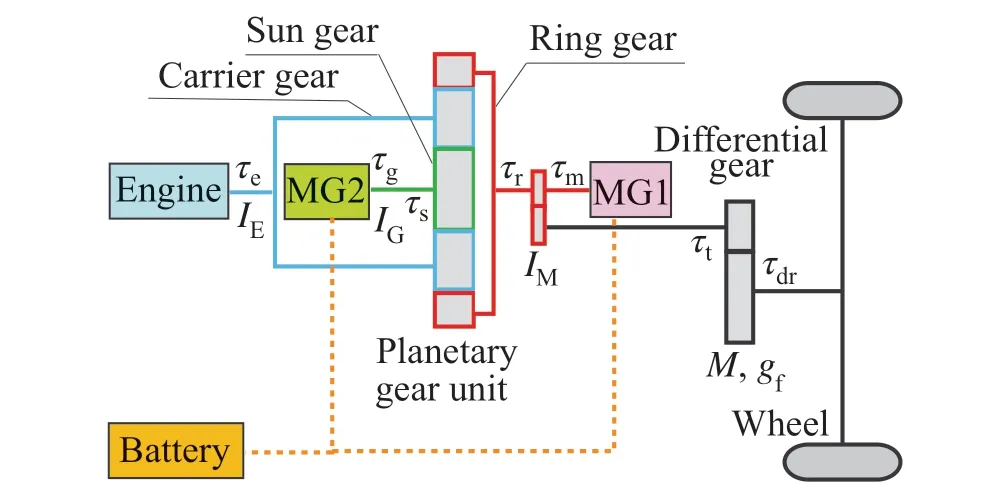
Fig.2 Image of HEV physical structure
2.1 System model
In this study,the considered HEV has a power-split structure with a planetary gear(PG)unit,as shown in Fig.2.The PG unit is composed of a ring gear,a carrier gear and a sun gear.The power sources of the HEV powertrain system are from the ICE and the battery through two electrical motors(MG1 and MG2).The axles of the engine,MG1 and MG2,connect to the carrier gear,ring gear and sun gear,respectively,and the corresponding inertias are denoted asIE,IMandIG.The notationsτe,τmandτgrepresent the torques of the engine,MG1 and MG2,respectively,andτrandτsdenote the torques transmitted from the ring gear and sun gear, respectively.The notationτtrepresents the total torque supply from the powertrain system.τdrrepresents the output torque from the differential gear, which has gear ratiogf. The notationMdenotes the entire mass of the vehicle.
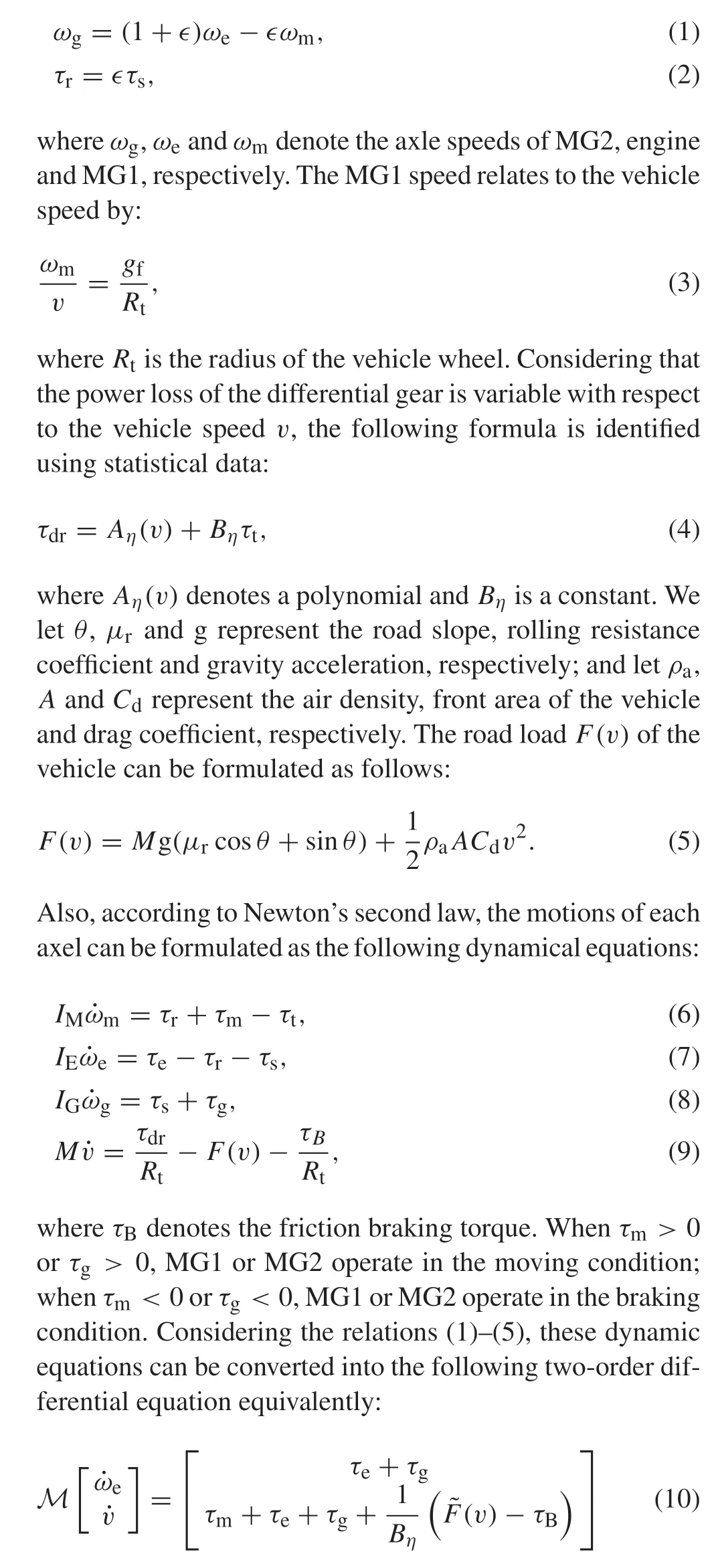
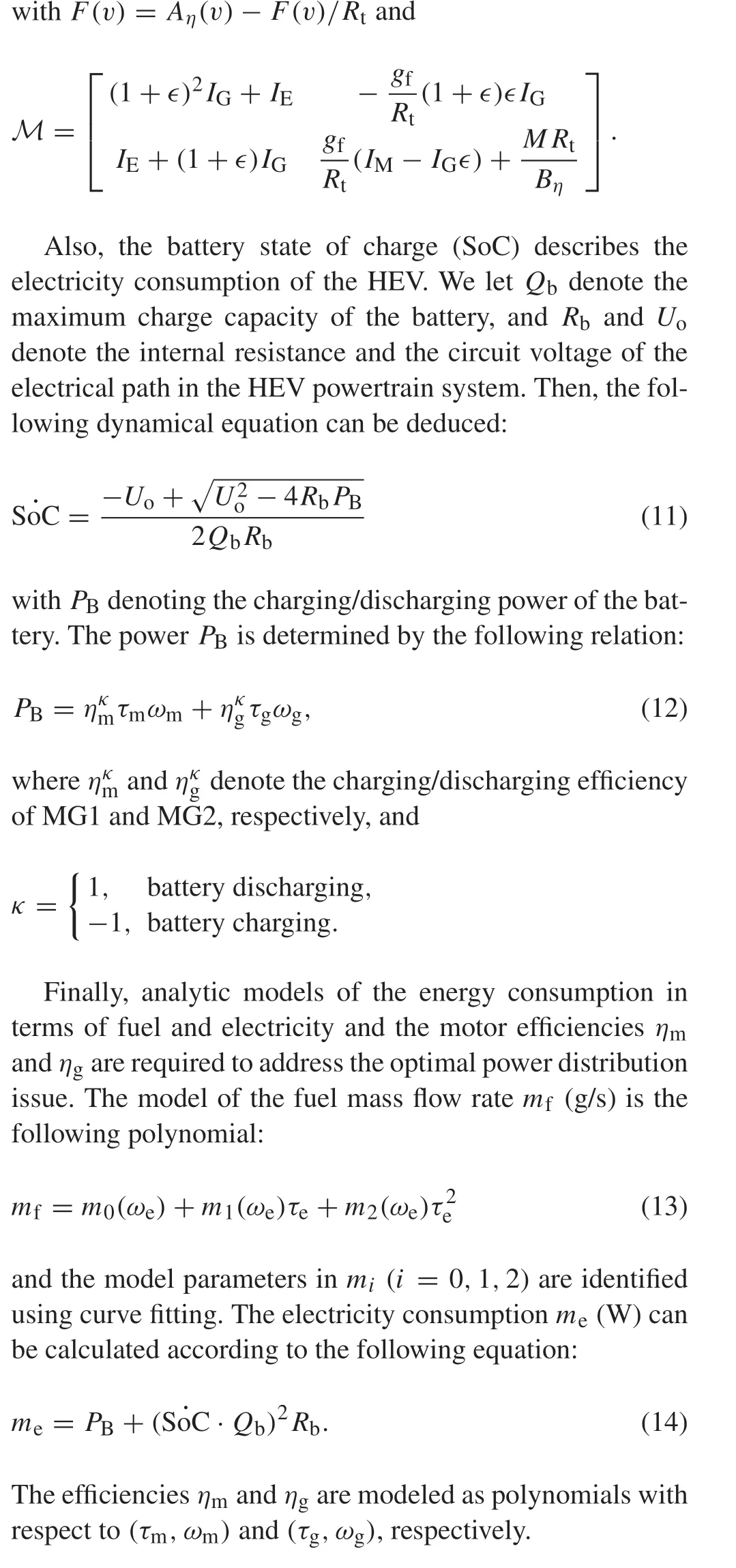
Regarding the PG unit-based HEV, the vehicle operates in electric mode under driving by MG1,and when the vehicle operates in hybrid driving mode,the power supplied by the engine is transmitted through the carrier gear to the ring gear.MG2 regulates the engine speed to the desired values to improve engine efficiency.We letRc,RrandRsdenote the radii of the carrier gear,the ring gear,and the sun gear,respectively,and these variables have the relation 2Rc=Rr+Rs.The gear ratio of the PG unit is denoted as∈=Rr/Rs. To model the powertrain system,we assume that all the connections in the powertrain system are rigidly coupled,and there is no power loss in the PG unit.
According to the physics of the PG unit,the following two relations hold:
3 Control strategy
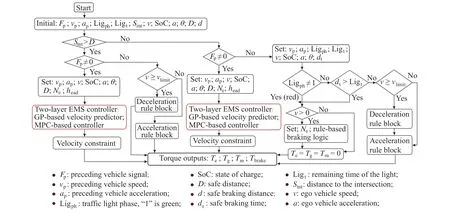
Fig.3 Flow chart of the proposed engine assignment system
Because the benchmark problem is complex, the primary target is to maintain safe driving. In a real traffic scenario,road conditions and preceding vehicles affect the operations of the eco vehicle. In addition, the traffic light is another critical factor that determines the driving modes, such as braking, speeding up and slowing down. Therefore, a rulebased outer strategy is designed to determine the operations of the eco vehicle. During the driving operation stage, the demand power is positive, and the powertrain operates in electrical vehicle (EV) mode or HEV mode. Power distribution between the electrical motor and the engine only occurs in HEV mode;therefore,a prediction-based optimal energy management strategy is proposed during HEV mode to reduce energy consumption.
For simplicity,we use a logical rule to determine the operating mode based on data from the eco vehicle along with V2I and V2V data.The flow chart of the proposed engine assignment system is shown in Fig. 3. Because traffic conditions around intersections are typically complex, a safe distanceDis defined as a judgment criterion to maintain safe driving. The real-time distance to the intersectionSintcan be obtained by the sensor technique.IfSint≥D,this condition is much easier for driving. Then, we consider the state of the preceding vehicle. If the preceding vehicle exists, thenFp/= 0, and the ec vehicle follows the preceding vehicle with a two-layer energy management controller.Otherwise,if there is no preceding vehicle, the ec vehicle will drive based on road constraints.In addition,ifSint<D,the distance to the intersection is less than the safety distance.Under this condition, more traffic information should be considered.The safety braking distancedis defined in this study.If the preceding vehicle and the conditionSint>dexist,the ec vehicle follows the preceding vehicle with the proposed two-layer energy management controller.Otherwise,several rule-based blocks are designed for when there is no preceding vehicle.Traffic lights must also be considered:if the traffic light is red, a braking logic rule is designed for safety; otherwise, a rule-based driving strategy is proposed based on the road constraints and braking time.
In the following section, a detailed description of the proposed two-layer optimal energy management strategy is introduced.Thecontrollerincludestwogroups.First,avelocity predictor is proposed in the upper layer to predict the future speed of the preceding vehicle. Then, the obtained velocity is considered to be the speed of the ec vehicle to generate the corresponding torque demand and serves the lower layer.In the lower layer,an MPC-based energy management strategy is designed to determine the power split with the aim of fuel economy. Fig. 4 shows the scheme of the proposed two-layer optimal energy management strategy.
3.1 GP-based velocity predictor
The velocity of the preceding vehicle in a time interval in the future is obtained by a developed Gaussian processes regression (GPR) model, and the GPR model is also constructed using the data of the ec vehicle as well as the V2V and V2I data.The used real-time information and the prediction structure are shown in Fig.5.With the predicted preceding vehicle speed,the desired vehicle speedvdcan be generated directly.As deduced in[20],according to the physics of the planetary and Newton’s law, the dynamics of the powertrain system during the hybrid operating mode can be summarized, and the torque demand can be generated.Then,during the HEVoperatingmode,theEMSisdevelopedaccordingtothedriver torque demand.
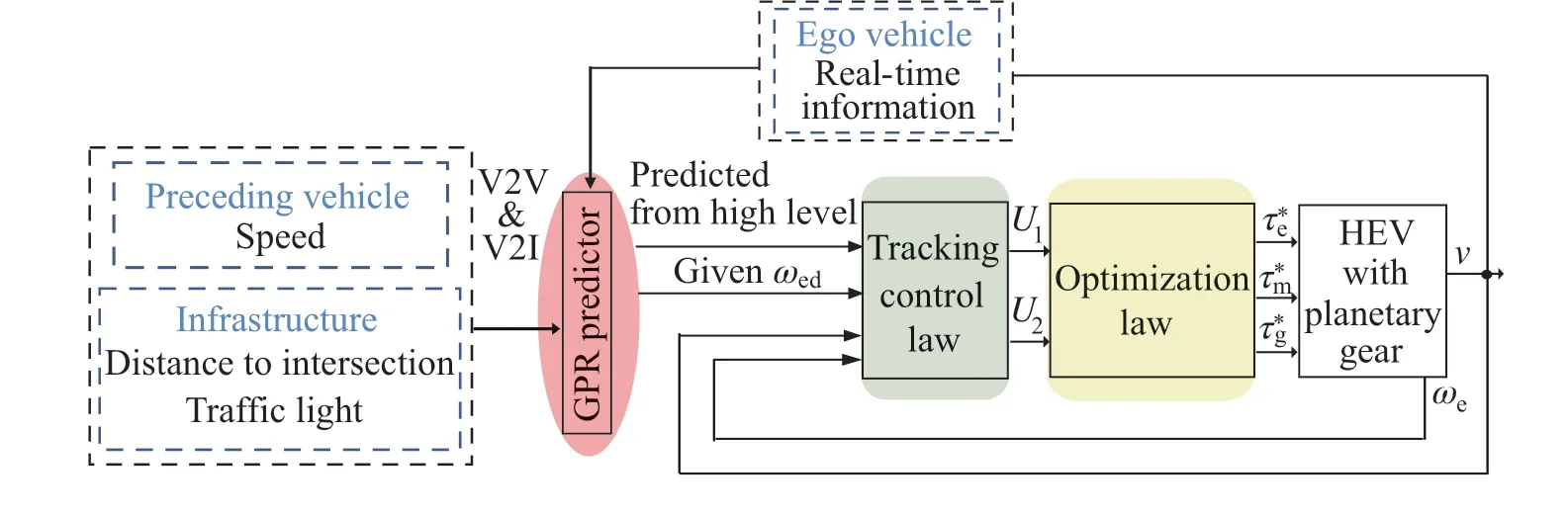
Fig.4 Scheme of the optimal energy management strategy
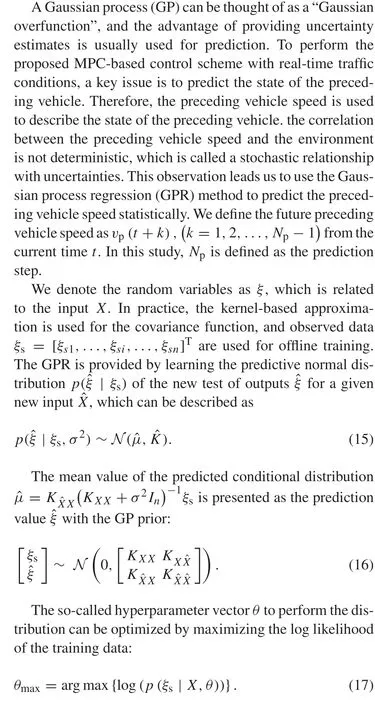
We use this fashion of GPR to the proposed velocity prediction issue;thus,the V2V and V2I variables areXi∈R12,and the meanings of the variablesXare shown in Table 1.Thek-step ahead prediction of the torque demandvp(t+k)(k=1,2,···,Np-1)is assumed to follow the GP as
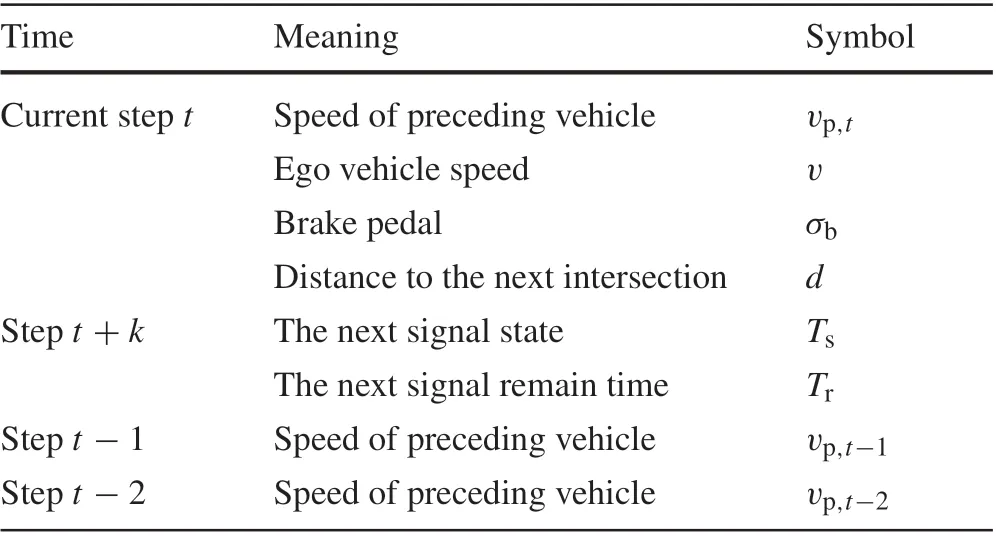
Table 1 List of the used V2X information

The historical traffic data are used to train the off-line GP model.The future preceding vehicle speed can be predicted with the GPR and real-time information.
3.2 Energy management design
As described above, the desired vehicle speed is predicted with the proposed GP-based algorithm;the power demand of the eco HEV is also determined.In this case,an energy management strategy should be developed to address the power distributionbetweentheengineandtheelectricalmotors(i.e.,a low-level control block). In the low-level block, the purpose of the control design includes speed tracking and energy consumption optimization.In this study,the two-loop control strategy proposed in[20]is used for energy management:one control loop solves the speed tracking problem,and the other solves the energy optimization problem.A brief description of the control strategy is summarized as follows.

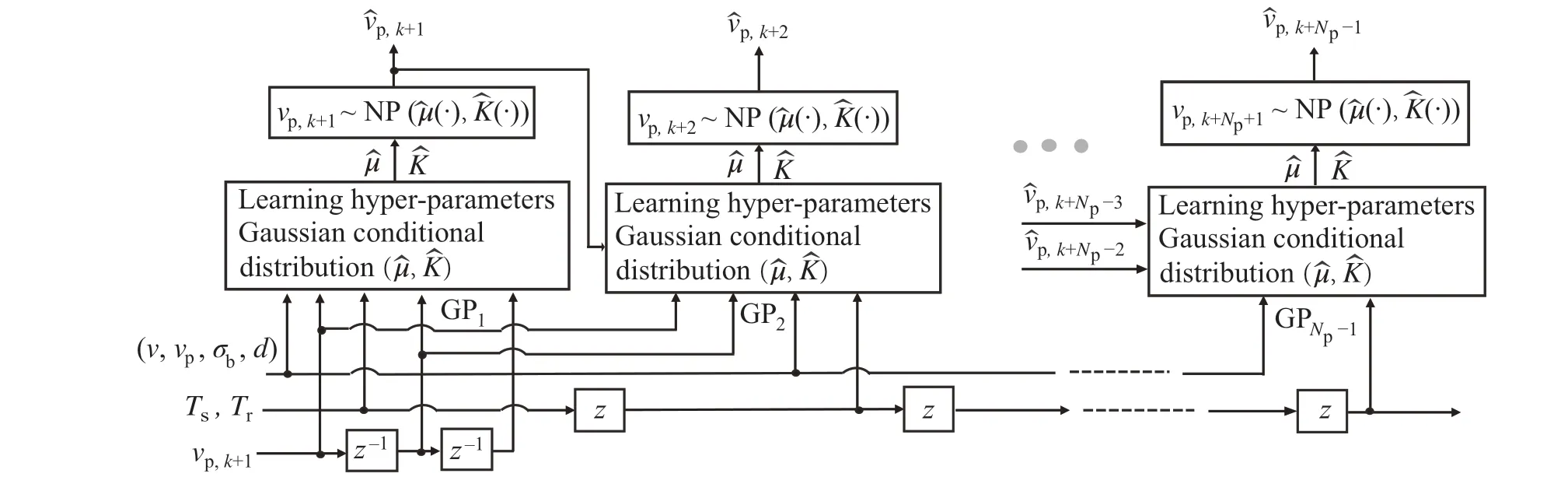
Fig.5 Structure of preceding vehicle speed prediction
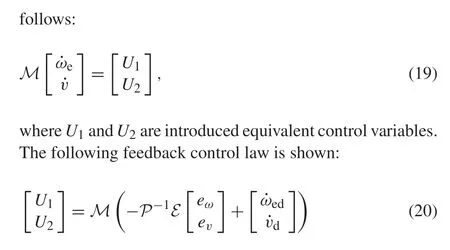
guarantees thatv→vdandωe→ωdast→∞,wherePandEare two given positive definite matrices.
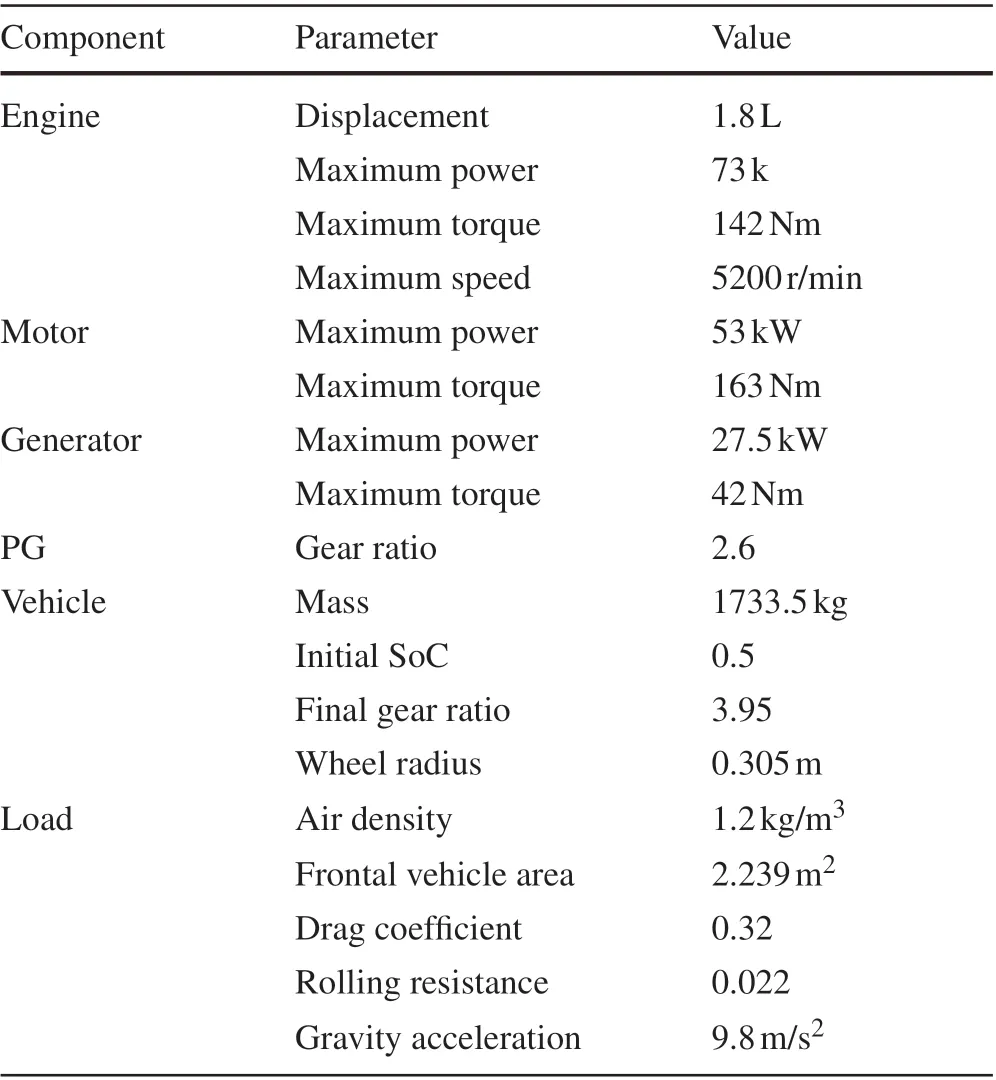
Table 2 List of the HEV parameters
Also,with the equivalent control law(20),the power distribution issue during the driving operation (i.e.τdr>0)determines the desired torquesτ*e,τ*mandτ*gof the engine,MG1 and MG2,respectively.We letu= [τ*e,τ*m,τ*g]Tand consider the following cost function:whereτ·minandτ·maxrepresent the corresponding boundaries that can be determined according to the characteristics of the engine,motors and battery.The optimal control problem(22)is nonlinear and cannot be solved analytically;thus,the problem is solved using the sequential quadratic programming (SQP) algorithm. More details about the energy management design approach are provided in reference[20].
4 Simulation results
Table 2 shows the parameters of the ec vehicle in the traffic scenario.The prediction tine isT= 4s with sampling timeΔt=0.5s.7 GP models are used for prediction.
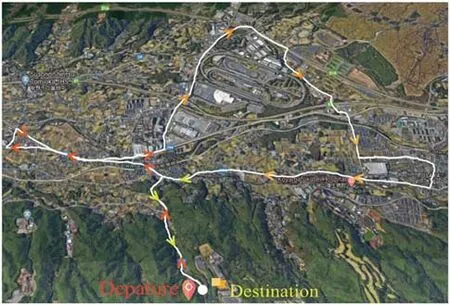
Fig.6 Running route in benchmark problem
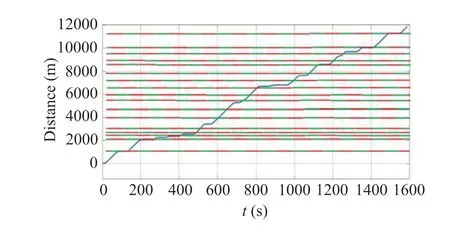
Fig.7 Real driving distance and traffic light conditions
To emulate the scenario in which a vehicle runs in realworld connective traffic with information communication through V2V and V2I,a co-simulation platform that includes a traffic simulator and powertrain simulator called the trafficin-the-loop (TILP) powertrain simulation platform is built.In this platform, the traffic simulation part and powertrain simulation part are realized by IPG CarMaker and MATLAB/Simulink,respectively.The HEV powertrain simulator is high-fidelity and is provided by Toyota Motor Corporation.Inthebenchmarkproblem,areal-worldsimulatedtraffic route is built,where the slope and intersection positions are obtained with real-world data,as shown in Fig.6.
In CarMaker,different traffic scenarios are generated by setting different traffic densities and different initial phases and remainder times of traffic lights in the 26 intersections along the route.In 10 different traffic scenarios,the information of V2V,V2I,V2C and GPS that is used for GP model training is collected and saved in this platform.Traffic data,including the above V2X information in different new traffic scenarios, are collected for the verification of the proposed algorithm.The real driving distance in the platform is shown in Fig.7.
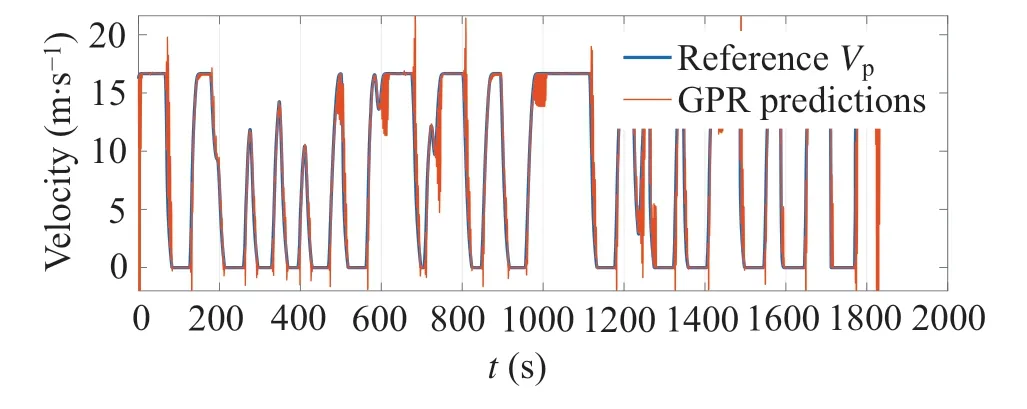
Fig.8 Velocity prediction results in a real traffic scenario
4.1 Velocity prediction results
First,the simulation results for the preceding vehicle’s velocity prediction with GPs are presented. The used traffic information is shown in Fig.5,which is collected from several random driving cycles to train the GP models with optimization of the hyperparameters.The prediction horizon is set asT=2s,and the sampling time isδt=0.5s.A total of 5000 sampling data points are used to train the GP models.Therefore,4 GP models are trained and are independent.Offline training results are complex and undesirable;therefore,the new velocity prediction results with another driving scenario based on the GPR method are directly demonstrated.
Prediction results are shown in Fig.8.The blue line represents the real speed of the preceding vehicle, and the red line represents the prediction results.Some unexpected pulse signals occur, particularly when the vehicle speed declines sharply.At that moment,emergency braking occurs,and the speed changes sharply,which leads to inaccurate predictions.In addition, to observe the prediction performance clearly,the detailed results of the predictions in Fig.8 are enlarged in Fig.9.The enlarged results shown in Fig.9 represent the velocities during(a)110s-340s and(b)1540s-1725s.
The error curves describe the prediction performance intuitively. Therefore, the prediction errors for each GP model are shown in Fig.10. The first subgraph with a blue line represents the real speed of the preceding vehicle for an 1800s driving cycle and is defined asvp. The prediction errors for the future 1st-4th steps are shown as red lines in Fig.10. Also, the root-mean-square error (RMSE) of each prediction result is used to evaluate prediction accuracy.The RMSE for the 1st-4th step predictions are as follows:RMES1 = 1.0534m/s, RMES2 = 1.0668m/s, RMES3 =3.0207m/s, and RMES4 = 3.4426m/s, respectively. The prediction accuracy thus decreases as the prediction step increases,primarily due to the accumulation of prediction errors.
In contrast, the details for some moments are shown in Fig.11,where the red line represents the real velocity of the preceding vehicle,and the blue line represents the prediction results.The top subgraph shows the future 2s(4-step)velocity prediction curve from the current timet= 195s with different dimensional input variables.The bottom subgraph shows the results from the current timet=860s.
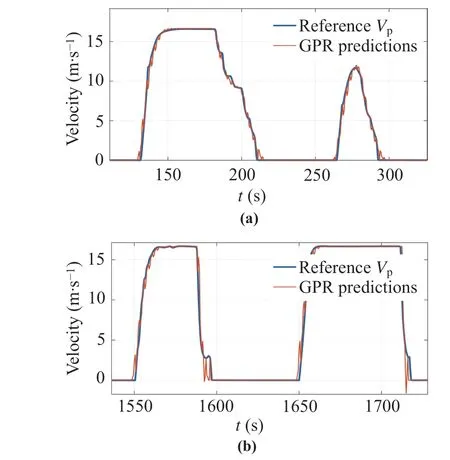
Fig.9 Enlarged velocity prediction results during some horizons
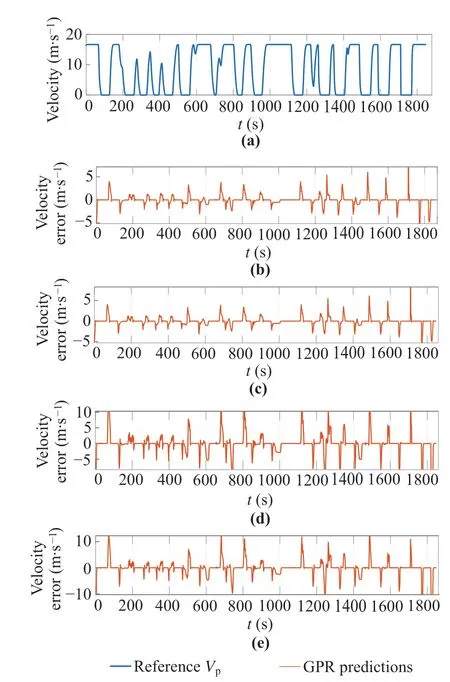
Fig.10 Velocity prediction errors for different horizons
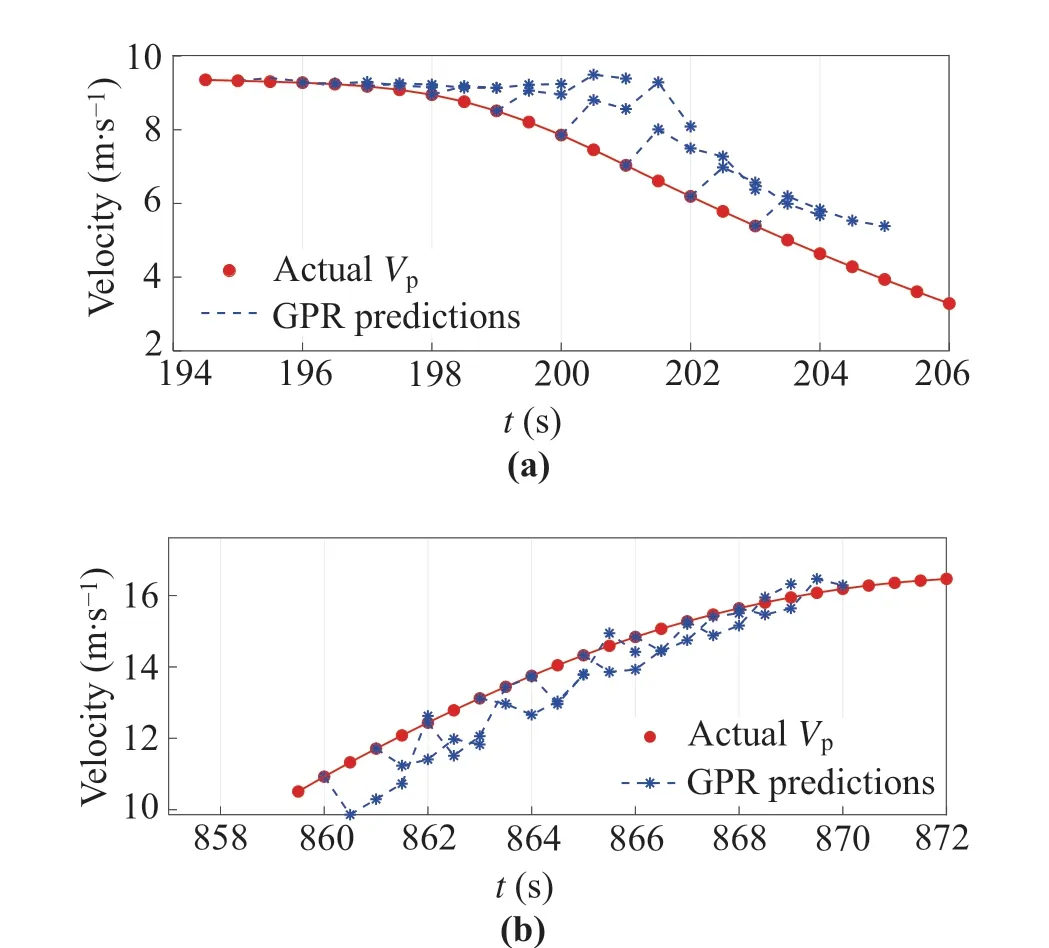
Fig.11 Details of prediction results at different moments
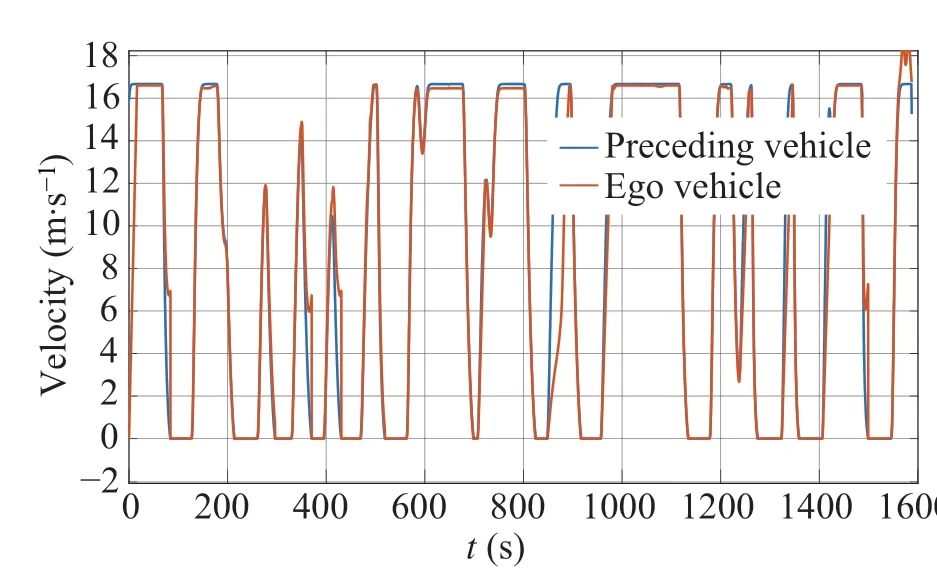
Fig.12 Vehicle speed and preceding vehicle speed
4.2 Torque split results
The proposed control scheme is evaluated on the platform of the benchmark simulator,and we maintain safe driving as a key issue.In Figs.12 and 13,the velocities of the preceding and eco vehicles,the running distance to the upcoming intersection and the driving distance of the preceding vehicle are given. In the figure, the blue line represents the velocity of the preceding vehicle,and the red line represents the velocity of the eco vehicle.The bottom figure represents the driving distance to the upcoming intersection, which is an important safety index.Results show that the designed controller achieves reasonable tracking performance. In some cases,when the vehicle is near the intersection, the traffic light is red;although the preceding vehicle exists,the ec vehicle cannot follow the preceding vehicle but stops for safety.
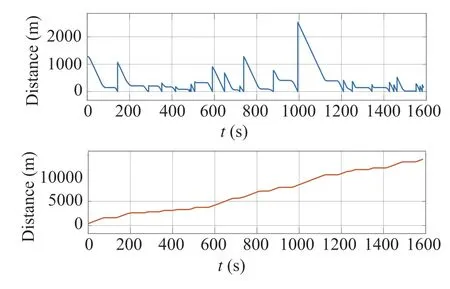
Fig.13 The distance to the upcoming intersection and the driving distance of preceding vehicle
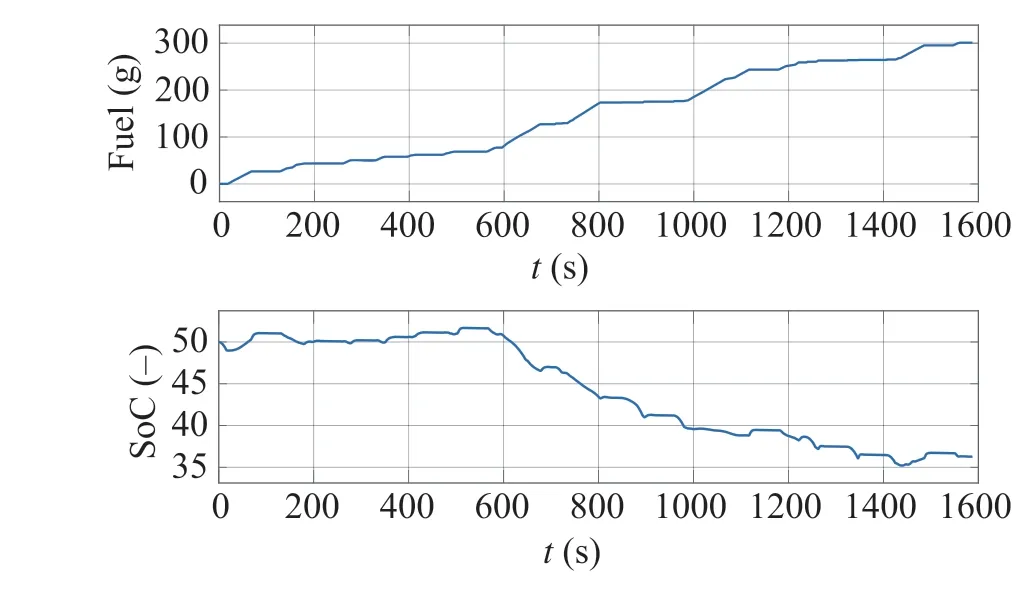
Fig.14 Fuel consumption and SoC dynamic during the whole driving cycle
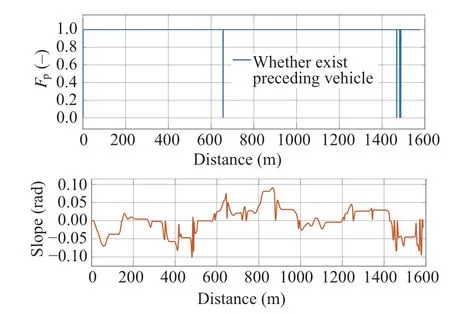
Fig.15 The preceding vehicle signal and the road slope
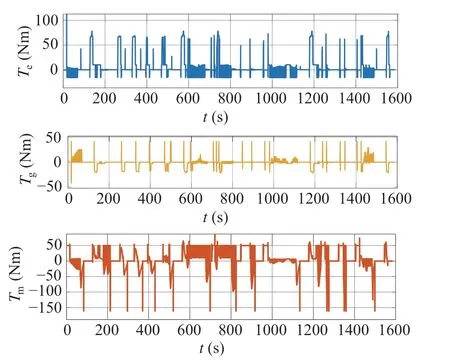
Fig.16 Torque split among the energy sources during the driving process
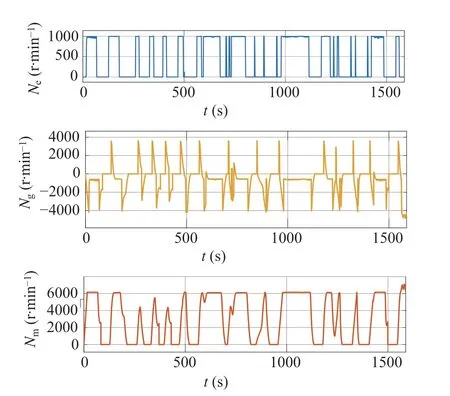
Fig.17 Speedofengine,generatorandmotorduringthedrivingprocess
The total energy consumption is shown in Fig.14 and reaches 525.2g. The initial SoC is equal to 50%, and the final battery state is SoC = 40%. The power consumption is within a reasonable range during the test driving cycle.In the first 500 s in Fig.14,the accumulated fuel consumption is approximately zero or even negative. Based on the slope information shown in Fig.15,the slope is first 5000m,which regenerates braking energy into electric power and stores it in the battery. Thus, there is a negative accumulated fuel consumption scenario in Fig.14.Fuel consumption increases rapidly from 600-1200s; conversely, the battery storage declines rapidly concurrently. The torques of the engine, motor and generator are shown in Fig.16. These three torques have physical limitations.The generator works to help the engine operate in a reasonable range.The motor also recovers energy when braking or slowing down. The related speeds of the engine,generator and motor are shown in Fig.17.The engine speed can be maintained at 1000r/min when it operates.The motor can also be maintained within a reasonable range of angular speeds.
4.3 Discussion
Regarding the proposed control scheme, the following remarks must be made:
(i) The key of the proposed scheme is to predict the driver torque demand using the data from the ec vehicle and the connected environment. However, the accuracy of the demand prediction does not affect the driving ability of the powertrain system because the real-time power demand is strictly satisfied in the power distribution problem.However,the prediction accuracy will affect the optimization performance.
(ii) For practical application requirements, it is important to develop a more rapid optimization algorithm. The considered problem is a multivariate nonlinear programming problem;thus,an online learning algorithm must be developed and improved.
(iii) In the proposed scheme,the application of V2X information relies on developing a model that can estimate future vehicle characteristics via learning.Statistically,this estimation can satisfy the purpose of prediction.However, the feature extraction of V2X information data should be analyzed in more detail,and a systematic method of extracting the characteristic quantities of V2X information data should be developed to improve prediction accuracy.
(iv) Thisstudyfocusesonthedevelopmentofanoptimizationbased solution to deal with the benchmark problem;however,the formulation of the optimization problem,including optimization target and constraint conditions’selection, is not exclusive. The primary goal of the benchmark problem is to minimize fuel consumption under driving-time and-safety constraints.How to formulate this optimization problem to set a reasonable connection between the evaluation index,and cost function and constraints conditions remains an open issue.
(v) In this benchmark problem,only the physical parameters of the HEV powertrain are provided.The modeling of the powertrain and battery thus remains a challenge.The modeling of powertrain dynamics is dependent on these challenges,which makes the identification model and identification parameters different, which is also a factor that could influence the optimization performance.
5 Conclusions
In this paper,an energy management strategy for the benchmark problem of ECOSM 2021 is proposed.The challenge of this study is to actively use the V2X information while maintaining safe driving. The task of the benchmark is to designanoptimal controller onafixedslopedroadtoimprove fuel economy;several criteria must be fulfilled,such as the travel safety and travel time. First, an approximate powertrain model is built based on the given physical parameters and driving data.Then,a multiple energy management strategy that includes rules and an RHC-based control scheme is proposed. The logical-based rules are then designed while considering the external environment information to maintain safe driving and determine the driving mode.To improve fuel economy, the optimization-based energy management strategy is primarily considered in this study.Finally,a case study is used to demonstrate the performance of the proposed strategy and the necessity of optimal powertrain control with consideration of V2V and V2X information.
杂志排行

Control Theory and Technology的其它文章
- Stochastic model predictive braking control for heavy-duty commercial vehicles during uncertain brake pressure and road profile conditions
- Characterizing human driver characteristics using an artificial neural network and a theoretical model
- Speed planning and energy management strategy of hybrid electric vehicles in a car-following scenario
- Real-time energy optimization of HEVs under-connected environment:a benchmark problem and receding horizon-based solution
- Torque control strategy with V2X information for HEVs to minimize fuel consumption
- Optimization of fuel consumption and NOx emission for mild HEV via hierarchical model predictive control