基于改进的FCM和信息熵修正的航迹融合算法
2022-07-04甄绪刘方
甄绪,刘方
国防科技大学 自动目标识别重点实验室,长沙 410005
分布式多传感器融合系统可以降低对整个系统中传感器性能和通信宽带的要求,还具有较高的可靠性、较强的生存能力和较短的决策时间等优点,因而在工程技术中得到了广泛的应用。经典的分布式航迹融合方法主要有简单凸组合算法、互协方差算法、分层航迹融合算法、协方差交叉算法、自适应航迹融合算法和最优线性无偏估计算,这些都是基于统计学的方法。简单凸组合算法在各局部节点的估计误差相互独立时,其融合结果是最优的;对于分布式多传感器融合系统,当各节点之间的互协方差难以计算或者无法获取时,采用协方差交叉融合算法可以保证融合结果一致,能够有效改善由于忽略节点间的互协方差引起的融合精度下降问题。
然而,在复杂环境和强干扰情况下,分布式多传感器融合系统中各个传感器提供的信息具有不完备性,主要表现在信息的不确定、不精确、不完整、模糊、多义、冲突等。
近年来,国内外一些学者针对不完备信息、传感器精度存在差异或机动情况下的目标跟踪问题进行了研究,并取得了一定的成果。
文献[5]研究了一类离散随机系统的最优估计问题,设计了一种预测器,对量测丢失信号进行补偿。文献[6]基于线性无偏最小方差估计准则,设计了一种与未知信道干扰无关的最优滤波器。这2种方法虽能有效改善量测丢失情况下的滤波问题,但采用的方法是集中式融合估计,计算量大而且过程复杂,制约了算法的工程应用。文献[7-11]针对传感器存在量测丢失情况下的常规目标的跟踪进行了滤波算法的分析和设计。其中文献[7]研究了量测丢失情况下的Kalman滤波方程的修正方法,在理论上验证了该方法能够提升融合系统的精度,但未进行仿真实验,缺乏工程应用价值依据。文献[8]基于矩阵满秩分解和加权最小二乘理论,提出了具有较小计算负担的加权观测融合估计算法,虽然提升了系统的融合精度,当目标机动时该算法的效率明显降低。文献[9]构建了一个统计意义下的局部滤波器,利用邻域内各节点量测信息修正局部滤波值。该算法可有效抑制传感器量测丢失时对目标跟踪结果的不利影响,但这种滤波修正不依赖于实际跟踪过程中不完全量测现象和数据包丢失现象的发生,仅依靠预先设定的这2种现象的发生概率,这对于工程中实时应用来说是不利的。文献[10]针对量测信号丢失时,用Kalman滤波中的一步预测值作为估值,设计滤波器,直至产生有效量测值,能有效提高量测丢失时机动目标跟踪的精度,但当目标运动状态发生变化,量测长时间丢失时,该算法具有一定的局限性。文献[11]为每个传感器子系统设计了最优估计器,并给出了矩阵加权融合估计算法。文献[12]提出了一种新的描述量测丢失的模型,并基于矩阵加权的融合准则设计了一种最优分布式融合Kalman滤波器。文献[11-12]设计的滤波器虽然对量测丢失的信号具有很好的补偿作用,但当传感器数量较多时,其融合方法计算复杂,不适合工程应用,且对机动目标跟踪效果不好。
文献[13-17]研究了传感器存在观测精度差异情况下的分布式多传感器融合系统的估计问题。其中文献[13]利用目标运动状态特征,求解局部航迹之间最佳隶属度,在融合中心用最佳隶属度算法完成权值分配实现航迹融合。文献[14]利用模糊数学方法构建局部航迹之间的隶属度矩阵并实现权值分配。上述2种方法在组网雷达跟踪精度差异较大的情况下,对机动目标的跟踪效果较好,但未考虑传感器存在量测丢失的情况。文献[15]利用表征航迹质量的特征信息建立熵等级,进而求得权值并进行多平台传感器状态融合,增强了航迹融合的稳健性,但在传感器存在量测丢失情况时该方法的融合精度不高。文献[16]利用交互式多模型(Interactive Multi Model,IMM)滤波算法提出了多模型航迹质量的概念,并将其用于权值分配,对机动目标的跟踪效果较好,但该方法引入了反馈机制,算法过程比较复杂,且易受传感器数目的影响。文献[17]利用标准熵量化了各个传感器局部航迹的不确定程度,删除了质量较差的局部航迹,该方法虽然对于提高最终系统航迹的精度起到了作用,但并非实时计算,而是从整体上对局部航迹进行删除,未能最大化利用各局部航迹的信息。此外,文献[18]设计了启发式函数,用于选择航迹质量最高的航迹;文献[19]使用信息熵定量刻画了传感器观测获得目标位置的信息量,理论推导了每个时刻实时最优化选取目标信息含量高的传感器进行跟踪的方法,具有良好的目标跟踪效果;文献[20-21]将IMM算法分别与高斯混合概率假设密度滤波和BP(Back Propagation)神经网络相结合,通过改进IMM算法,不同程度上提升了对机动目标的跟踪性能。文献[18-21]虽然在一定程度上提升了分布式多传感器融合系统的跟踪性能,但均未考虑传感器量测丢失和观测精度不同等情况。除文献[17-19]外,大部分航迹融合算法均是将所有的局部航迹进行融合,处理思路中普遍存在如下问题:① 未充分考虑局部航迹质量参差不齐时,不加选择全部融合后的系统航迹质量优劣;② 对局部航迹进行了选择,但理论假设简单,未考虑航迹质量动态变化情况;③ 针对相对单一条件下的航迹融合问题适宜,面向实用的环境动态多变、敌我对抗干扰情况下,量测非完备且存在丢失、传感器观测精度受到多种扰动情况下分析欠缺。
航迹选择问题可以转化为聚类问题,即依据航迹质量的不同分为不同的类别。由于现实世界中许多对象或事物本身具有不确定性,因此人们开始引入模糊理论来客观地对研究对象或事物进行聚类,并称之为模糊聚类分析。在各种模糊聚类算法中,模糊C均值(Fuzzy C-Means,FCM)算法是经典的算法之一。但FCM算法未考虑分类数据的信息质量这一因素,简单的认为所有数据的信息质量相同,经该算法得到的聚类中心和隶属度不是最优的。
针对上述问题,假设分布式多传感器融合系统已经完成了不同目标的航迹关联,本文从航迹选择的角度出发对多个传感器观测同一目标产生的局部航迹的融合方法进行了研究,提出了基于改进的FCM和信息熵修正的航迹融合算法。该算法将补偿滤波器代替交互式多模型中的卡尔曼滤波器,有效解决了传统的交互式多模型滤波算法处理量测丢失信号、机动信息的不足;引入信息熵度量,评测时刻的量测不确定性以及局部航迹质量,以此作为权重改变均衡使用聚类数据求解模糊聚类中心的常规算法,使单一时刻的局部航迹估计更少受到坏数据点的影响。
仿真结果表明在传感器的观测精度存在差异且量测丢失率不同的情况下,该算法对机动目标的跟踪性能更为突出。
1 基础知识
本节首先给出非完备量测条件下的目标运动模型与量测模型的基本形式,然后引出用于交互式多模型的补偿滤波方法,最后对后续用于航迹选择与融合的关键工具模糊C均值聚类做简单说明。
1.1 目标运动及观测模型
假设不完备量测情况下分布式多传感器融合系统中单个目标的线性离散信号模型和每个传感器对目标的线性观测模型分别为
(+1)=()+()
(1)
()=()+()
(2)
()=()()+(1-())(|-1)
(3)
式中:=1,2,…,,为传感器的数目;()为时刻的系统的状态矢量;为预测状态转移矩阵;为系统扰动矩阵;()为系统扰动噪声,是均值为0、方差为()的高斯白噪声序列;()为完备信息情况下时刻第个传感器对目标的观测值;(|-1)为不完备信息情况下时刻第个传感器对目标的预测观测值;()为不完备信息情况下第个传感器在时刻的观测值;为第个传感器的观测矩阵;()为观测噪声,是均值为0、方差为()的高斯白噪声序列,且()、()相互独立,即满足
E[()]=
(4)
E[()(′)]=()′
(5)
E[()]=
(6)

(7)

(8)
其中:()是取值为0或者1的离散随机变量,()=1表示第个传感器量测到完备的数据信号,()=0表示量测数据信号丢失或者信息不完备;表示第个传感器的数据量测丢失率,满足
Prob{()=0}=0≤≤1
其中:()=0对应取极限形式,即→∞。
1.2 补偿滤波算法
文献[11]分布式融合方法中的滤波器能够实现对量测丢失信号的预测补偿作用,但其融合方法计算过程复杂,不利于工程应用,其滤波算法适合处理单一运动模型的滤波问题,不适合机动目标跟踪滤波。本文将此滤波器代替卡尔曼滤波器用于后续的交互式多模型滤波算法中,以克服传统的交互式多模型滤波算法处理量测丢失信号的不足,同时利用交互式多模型滤波算法跟踪机动目标的优势,提升该滤波器处理机动目标的滤波补偿能力。假设利用第个传感器的观测数据实现滤波补偿,单模型下该滤波器的补偿作用实现过程如下:


(9)

(10)
(|)=[-()()](|-1)
(11)


(12)
()=-()
(13)

(14)

(15)

(16)
将此滤波算法应用到交互式多模型中,用于处理量测丢失情况下的机动目标跟踪滤波问题。
1.3 FCM算法
在众多模糊聚类算法中,FCM算法应用最为广泛且较为成功,通过优化目标函数得到每个样本点对所有类中心的隶属度,从而决定样本点的类属以达到自动对样本数据进行分类的目的。所谓的模糊就是分类具有不确定性,这里用隶属度来表示这个不确定度。
给定数据集={,,…,},表示第个样本,是具有维特征的一个样本。为类别数目,(=1,2,…,)为第个聚类的中心,也具有维度。是第个样本对应第类的隶属度函数,则基于隶属度的聚类损失函数可以写为

(17)

(18)
式(17)中:∈(1,∞)为模糊指标,值越大,该算法的模糊水平就越大,值越小,该算法的模糊水平也就越小。
利用拉格朗日乘数方法计算聚类损失函数的最小值,建立该乘数函数的表达式为
(19)
令对和的偏导为0,求得式(19)极限值的必要条件。
(20)
(21)
采用迭代的方法求解式(20)和式(21),直至满足收敛条件,得到最优解,迭代停止条件为

(22)
式中:是迭代次数,是允许范围内的误差值。当算法收敛时,就得到了各类的聚类中心和各个样本对于各类的隶属度,从而完成了模糊聚类的划分。
2 算法原理
为了更好地说明该算法的实现原理和过程,本节从3个方面进行详细说明,一是基于IMM补偿滤波获得局部航迹和信息熵;二是利用改进的FCM算法进行局部航迹的类别划分;三是临时系统航迹的形成与修正。
2.1 基于IMM补偿滤波获得局部航迹和信息熵
本文将文献[11]中的滤波器应用到IMM滤波算法中,实现对量测丢失信号的预测补偿作用。文献[11]的滤波器是一种局部线性最优滤波器,其融合算法复杂、计算量大,且不适合机动目标跟踪,该算法的跟踪性能将会在仿真实验中加以验证。
通过IMM补偿滤波算法,得到时刻第个传感器的局部航迹()以及()在模型下的匹配概率为(),其中()只包含状态矢量()中的位置信息。根据信息熵的定义,可得IMM补偿滤波算法中时刻第个传感器的局部航迹()的信息熵为

(23)
式中:={1,2,…,},={1,2,…,},为传感器的数目,为模型的数目。信息熵是对系统自身不确定性的度量,表示信息的可信程度,一个系统越稳定,即变量的不确定性越小,熵值也就越小。在IMM滤波算法中,()为局部航迹()在模型下的匹配概率,经统计分析发现,当局部航迹()与模型的匹配概率越大,而与其他模型的匹配概率越小时,说明第个传感器观测到的目标运动状态与模型越相似,该局部航迹信息的可信度就越高,而此时计算得到的信息熵Hs()就越小;当局部航迹()在个模型下匹配概率相差不多,没有突出的最大值时,说明第个传感器观测到的目标运动状态与个模型相似度均较低,当个匹配概率越相近时,该局部航迹信息的可信度就越低,而此时计算得到的信息熵就越大。
因此可以利用信息熵来度量局部航迹质量,即当信息熵越小时,该局部航迹质量就越好;信息熵越大时,该局部航迹质量就越差。
2.2 利用改进的FCM算法进行局部航迹类别划分
经过IMM补偿滤波,获得时刻传感器的局部航迹(),随即可以获得数据集()={(),(),…,()}。如果将数据集()中的元素视为是空间坐标系中不同的点,而这些点具有相同的“质量”,应用FCM算法寻找聚类中心的过程可视为寻找最优质心的过程。当这些点的“质量”不同时,应用该算法所寻找到的聚类中心就不是最优的质心,所以需要考虑数据集()中的数据 “质量”这一因素,对FCM算法进行改进。此外数据点的“质量”也可以是数据点的重要程度或信息质量。在航迹融合算法中,数据点的“质量”表示为局部航迹的质量。
在两个点间寻找质心时,质心总是偏向于“质量”较大的点,由于基于FCM算法获得的聚类中心没有考虑数据点的“质量”,因此当数据点的“质量”越大时,利用FCM算法得到的数据点与聚类中心之间的距离带来的误差就越大,这个误差()定义如下:

(24)
()=exp(-(Hs()))
(25)
式中:()为第个传感器的局部航迹;()为误差因子,与信息熵成反比关系,值域为[0,1]。
考虑到数据()的“质量”因素,将FCM算法的聚类损失函数修改为

(26)
式中:为聚类类别数目。信息熵可以用来度量局部航迹的质量,即当局部航迹的信息熵越小时,该航迹的质量就越好,在FCM算法中数据点的“质量”或重要程度就越大,其误差因子也就越大。()在式(26)中起着加权各聚类距离误差调节作用,重点考虑那些质量更好的数据点,规避质量差的数据点带来的干扰,所以采用非线性的权重更稳妥。
通过拉格朗日乘数方法,获得聚类中心和隶属度的表达式
(27)

(28)
文献[24]研究了模糊指标的选取对FCM算法性能的影响,指出模糊指标理论上依赖数据本身,并给出了理论上选取模糊指标的规则,即当≥3时,1<≤(-2),为数据维数。满足此条件的任意皆可为理论上有效的FCM算法的模糊指标,且FCM算法的表现对的变化不敏感。本文中局部航迹的数据为空间直角坐标系中点的坐标,数据维数为3,因此1<≤3,在本文算法中取值为2。
FCM算法要求预先给定分类数,然而,分类数一般是不可能预先知道的,许多学者提出了各种分类准则,其中一个广泛的约束条件为2≤≤-1。这些准则的主要目的是为了数据的精确分类,其算法比较复杂,适合数据量大的分类应用。本文算法的分类数据是时刻不同的传感器对同一目标进行观测产生的局部航迹信息,数据量较小。分类主要是为了将不同质量等级的局部航迹进行区分,实现局部航迹的初次选择和融合。因为条局部航迹中必然存在一条质量最差的局部航迹,为了将质量较好与质量较差的局部航迹进行区分,所以在本文中值设置为2。分类粗糙可能会降低融合后的系统航迹质量,为了减少这方面的影响,在2.3节中利用信息熵来修正融合后的系统航迹。

2.3 临时系统航迹的形成与修正
2.2节中利用隶属度对局部航迹进行了类别划分,使得每个局部航迹属于不同的类别。从2.1 节可知,信息熵可以用来度量局部航迹的质量,信息熵越小,局部航迹的质量就越好。由于同一类别中所包含的局部航迹信息相近,因此信息熵最小的局部航迹所在的类别较其他类别融合形成的航迹质量要好。将该类别包含的局部航迹的融合结果定义为临时系统航迹(),即
(29)
式中:为信息熵最小的局部航迹所在的类别;为该类别包含局部航迹的数目,1≤<。虽然该类别包含的局部航迹信息相近,但局部航迹的信息熵不同,因而局部航迹的质量也不同。由于=2时为粗糙分类,为了进一步提高融合后的系统航迹质量,需要去除该类别中航迹质量较差的局部航迹,将剩余的质量较好的局部航迹进行融合,产生修正后的系统航迹。定义阈值,当局部航迹的信息熵小于阈值时,该局部航迹的质量较好,进而参与航迹融合。阈值定义为

(30)
()=max(())=1,2,…,
(31)
≤()≤1
(32)
(33)
式中:()为局部航迹在模型下的匹配概率,且为个模型匹配概率中的最大值;为概率阈值。当()≥时,视为局部航迹在模型下达到了较好的匹配效果,此时的局部航迹质量也较好。利用式(30)及式(31)~式(33)下的约束条件,可以计算出阈值。当局部航迹信息熵<()时,该局部航迹被选中。
利用阈值()在式(30)中的个局部航迹中进行选择,假设共有个局部航迹符合条件,则当>0时,将这些被选中的局部航迹进行融合得到修正后的系统航迹,即
(34)
若=0,即没有局部航迹满足相应的条件,则将临时系统航迹为最终的系统航迹。
综上,最终的系统航迹为
(35)
本文算法中最优取值范围为0.6~0.7,此情况将在仿真实验中加以验证。
经分析,当<0.6时,随着的变小,阈值逐渐变大,就会有越来越多的信息熵较大的局部航迹被选择,这部分局部航迹的质量较差,因此会降低系统航迹的质量。当>0.7时,随着值的变大,阈值()逐渐变小,容易导致2种情况发生:一是由于阈值变小,提高了局部航迹选择的质量门限,基于阈值所选择的局部航迹虽然质量很好,但其数量也相应地减少,导致部分质量较好的局部航迹未被选择,而这部分航迹参与融合后可以提升系统航迹的质量,若不参与融合,则会导致系统航迹质量的降低;二是由于阈值过小,致使任何一个局部航迹都不满足选择条件,此时临时系统航迹将会作为最终的系统航迹,这就导致基于阈值选择局部航迹的方法失效。
综上,算法具体步骤如下:
时刻多个传感器对同一目标的观测数据={(),(),…,()}。
时刻多个传感器对同一目标观测数据的融合结果()。
经过交互式多模型补偿滤波获得传感器的局部航迹()和信息熵Hs(),进而获得数据集()={(),(),…,()}。
=1~Iter

结束。
=1~
利用隶属度对局部航迹进行类别划分,计算=arg(max(())),=1,2,…,,则()属于第类别。
结束。
获得最终的系统航迹。
1) 寻找包含具有最小信息熵的局部航迹的类别。
2) 将该类别包含的所有局部航迹利用式(29) 进行计算,将其结果定义为临时系统航迹()。
3) 将步骤1)类别中的局部航迹通过()进行选择,得到符合条件的局部航迹数量为。
4) 如果>0,利用式(34)计算获得修正后的系统航迹(),并将其作为最终的系统航迹。否则,将步骤2)中的临时系统航迹()作为最终的系统航迹。
结束。
3 本文算法流程说明
该算法首先利用IMM补偿滤波获得各个传感器的局部航迹和信息熵;然后,通过改进的FCM算法得到局部航迹的聚类中心和隶属度,利用隶属度对局部航迹进行类别划分;进而,寻找包含具有最小信息熵的局部航迹的类别,利用式(29) 获得临时系统航迹,通过信息熵阈值对局部航迹进行选择,利用式(34)获得修正后的系统航迹;最后,利用式(35)输出最终的系统航迹算法。流程如图1所示。
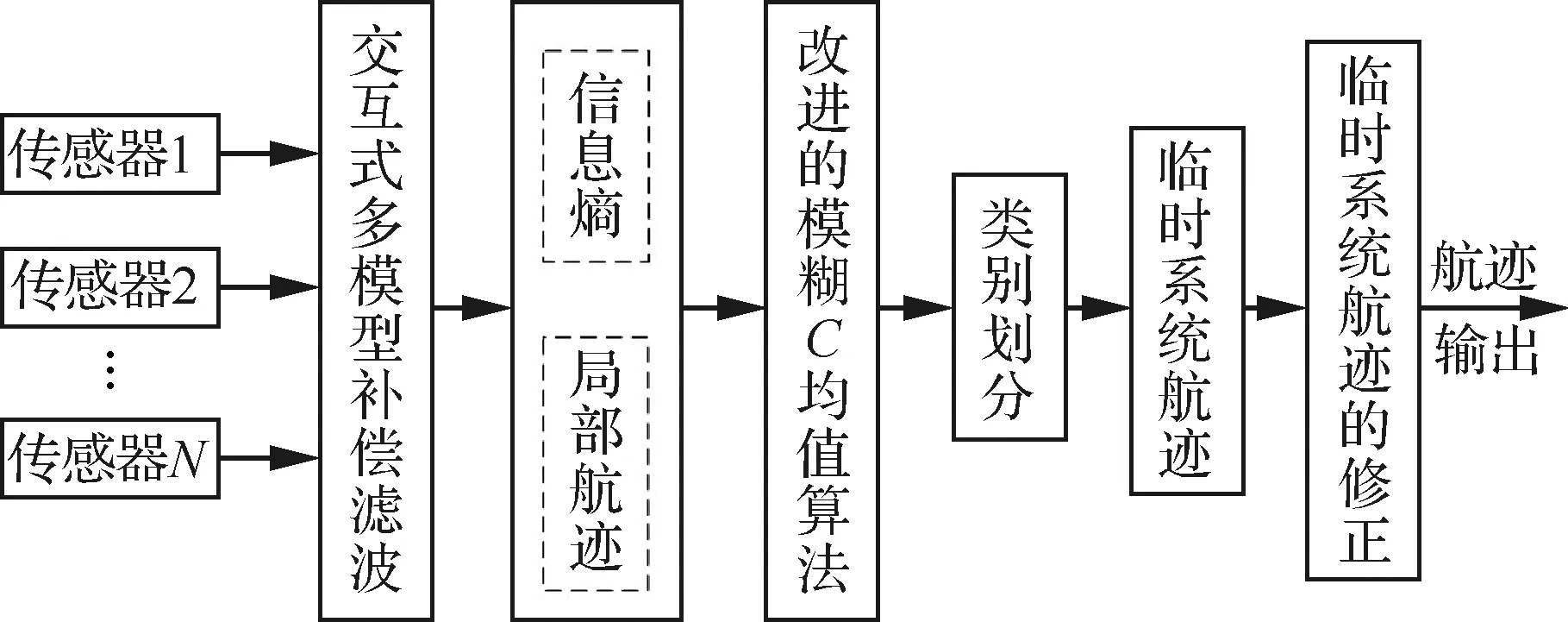
图1 本文算法流程图Fig.1 Flow chart of algorithm in this paper
4 仿真验证与分析

(36)
由于本文算法应用的前提是分布式多传感器融合系统已经完成了航迹关联处理,因此该算法很容易由多传感器观测一个目标的场景拓展到多个目标的场景。此外,本文重点围绕目标做机动运动以及多传感器量测丢失不均衡等情况开展研究,所以设置场景为多个传感器观测一个目标,采样周期和融合周期均为1 s,观测时长为120 s。假设目标做机动运动,初始位置为(1 000,5 000,5 000)m,初始速度400 m/s,0~30 s做转弯率为0.05 rad/s的左转弯运动,31~60 s做转弯率为0.03 rad/s的右转弯运动,61~90 s做转弯率为0.05 rad/s的左转弯运动,91~120 s做转弯率为0.03 rad/s的右转弯运动。图2为机动目标航迹。
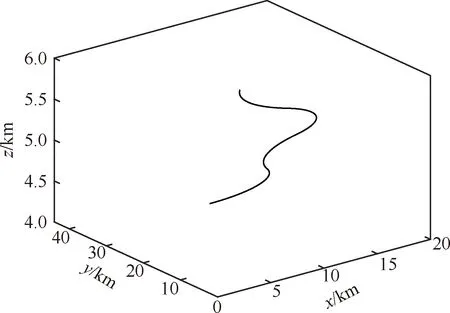
图2 机动目标运动轨迹Fig.2 Track of maneuvering target
实验采用蒙特卡洛仿真方法,仿真次数为mont=500次,跟踪性能指标为距离均方根误差,其表达式为

(37)
实验假定传感器的观测数据已经完成数据关联和时空校准等数据预处理环节,结合本文算法具体实现过程从以下5个方面进行验证分析:第一,考察在传感器观测精度和量测丢失率相同情况下,比较文献[11,16]、简单凸组合融合算法、协方差交叉融合算法和本文算法的跟踪性能;第二,考察在传感器量测丢失率相同而观测精度不同情况下,文献[16]、简单凸组合融合算法、协方差交叉融合算法和本文算法的跟踪性能;第三,考察在传感器观测精度相同而量测丢失率不同情况下,文献[16]、简单凸组合融合算法、协方差交叉融合算法和本文算法的跟踪性能;第四,考察值对本文算法跟踪性能的影响;第五,研究本文算法的跟踪性能和传感器数目的关系。
4.1 传感器观测精度相同且量测丢失率相同
此次实验采用4部观测精度相同的传感器对同一目标进行观测,假设4部传感器的观测精度均为31.18 m,量测丢失率均为20%,值设置为0.6。本文算法与文献[11]算法进行比较,是因为本文在IMM滤波过程中借鉴了文献[11]中的滤波算法,但本文的融合算法与文献[11]的融合算法不同,做出比较是为了进一步说明在跟踪机动目标时,本文算法的跟踪性能优于文献[11]的算法。5种算法的融合跟踪均方根和跟踪性能比较如表1和图3所示。
从表1和图3中可以看出,当4个传感器的观测精度、量测丢失率都相同时,本文算法的跟踪性能优于文献[11]算法、文献[16]算法、简单凸组合融合算法以及协方差交叉融合算法的跟踪性能,性能分别提升43.65%、12.14%、17.23%和18.37%。同时经过仿真实验发现,当4个传感器的观测精度、量测丢失率都相同时,随着观测精度的降低或量测丢失率的增加,5种算法的跟踪性能都会降低,但本文算法的跟踪性能仍然优于其他4种算法的跟踪性能。由于文献[11]算法不适合机动目标跟踪,所以以下实验重点对文献[16]、简单凸组合融合算法、协方差交叉融合算法和本文算法的跟踪性能进行比较。
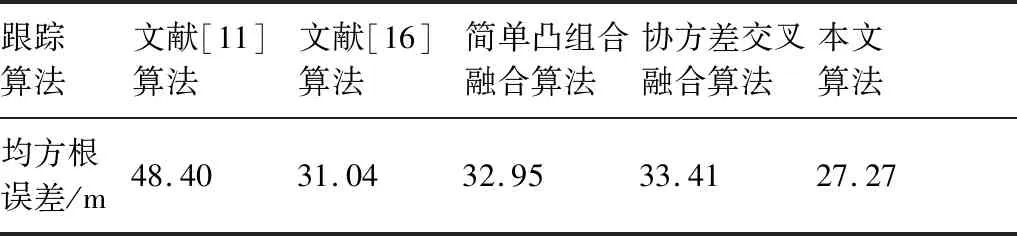
表1 5种算法的融合跟踪均方根误差比较Table 1 Comparison of root mean square error of fusion tracking between five algorithms
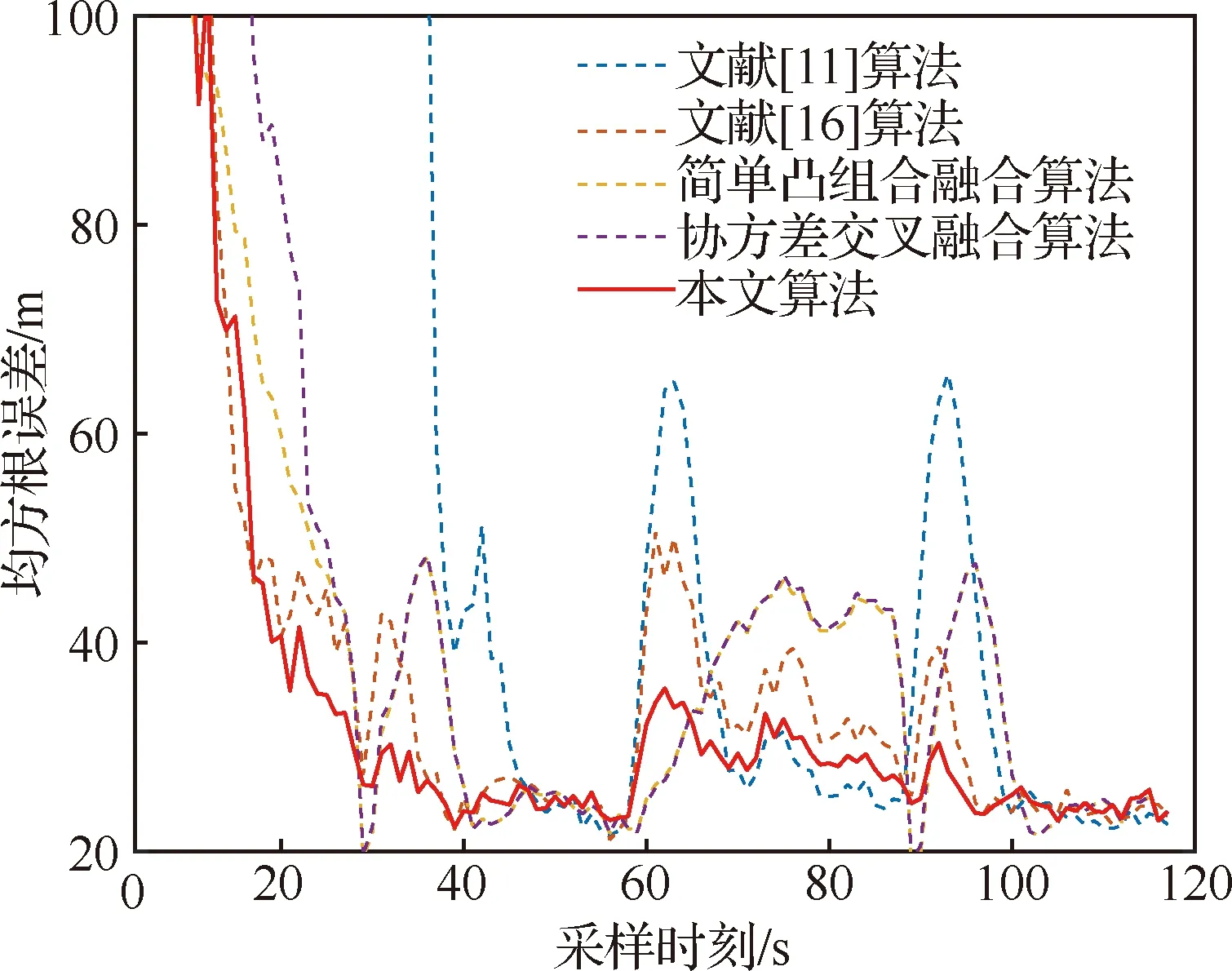
图3 5种算法的跟踪性能比较Fig.3 Comparison of tracking performance of five algorithms
4.2 传感器量测丢失率相同但观测精度不同
此次实验采用4部观测精度不同的传感器对同一目标进行观测,值设置为0.6。假设4部传感器的量测丢失率均为20%,而观测精度分别为29.44,31.18,32.91和34.64 m。由于要与文献[16]算法进行比较,因此观测精度取值参照文献[16],观测精度分别降低约5%。此外,应用本文算法前假设传感器的位置已经完成了坐标转换,因此4部传感器取上述观测精度且任意分配时,不影响最终的实验结果。4种算法的融合跟踪均方根误差和跟踪性能比较如表2和图4所示。
从表2和图4可知,当4部传感的量测丢失率相同而观测精度不同时,本文算法的跟踪性能始终优于文献[16]算法、简单凸组合融合算法和协方差交叉融合算法的跟踪性能,跟踪性能分别提升12.62%、18.51%和19.73%。
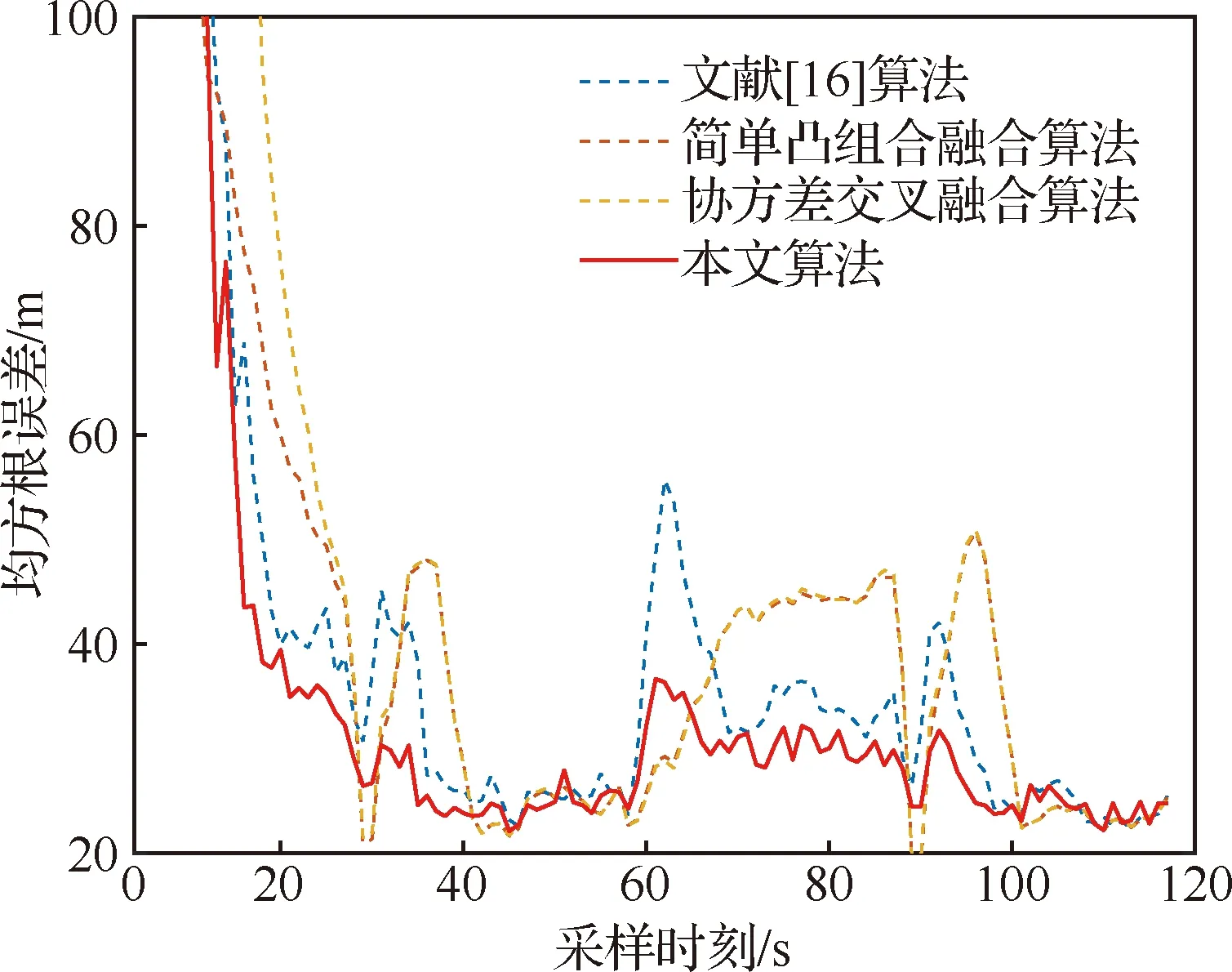
图4 4种算法的跟踪性能比较(传感器量测丢失率相同但观测精度不同)Fig.4 Comparison of tracking performance between four algorithms (sensor measurement loss is same, observation accaracy is different)
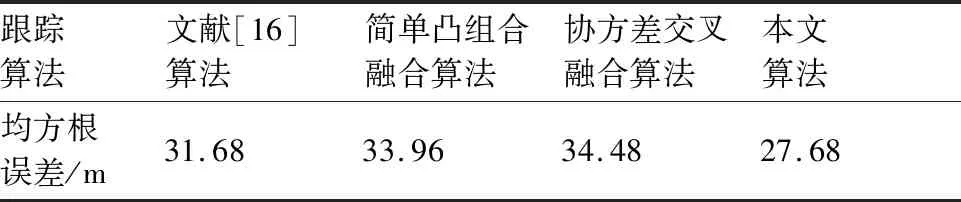
表2 4种算法的融合跟踪均方根误差比较(传感器量测丢失率相同但观测精度不同)Table 2 Comparison of root mean square error of fusion tracking between four algorithms (sensor measurement loss is same, observation accaracy is different)
经仿真实验发现,当4部传感器的量测丢失率相同时,4种算法的跟踪性能随着传感器间观测精度的差别变大而降低,但本文算法的跟踪性能仍然优于其他3种算法的跟踪性能。
4.3 传感器观测精度相同但量测丢失率不同
此次实验采用4部量测丢失率不同的传感器对同一目标进行观测,值设置为0.6。假设4部传感器的观测精度均为31.18 m,而量测丢失率分别为20%、25%、30%和35%。此外,应用本文算法前假设传感器的位置已经完成了坐标转换,因此4部传感器取上述量测丢失率且任意分配时,不影响最终的实验结果。4种算法的融合跟踪均方根误差和跟踪性能比较如表3和图5所示。
从表3和图5知,当4部传感器的观测精度相同而量测丢失率不同时,本文算法的跟踪性能始终优于文献[16]算法、简单凸组合融合算法和协方差交叉融合算法的跟踪性能,跟踪性能分别提升18.32%、19.36%和21.23%。
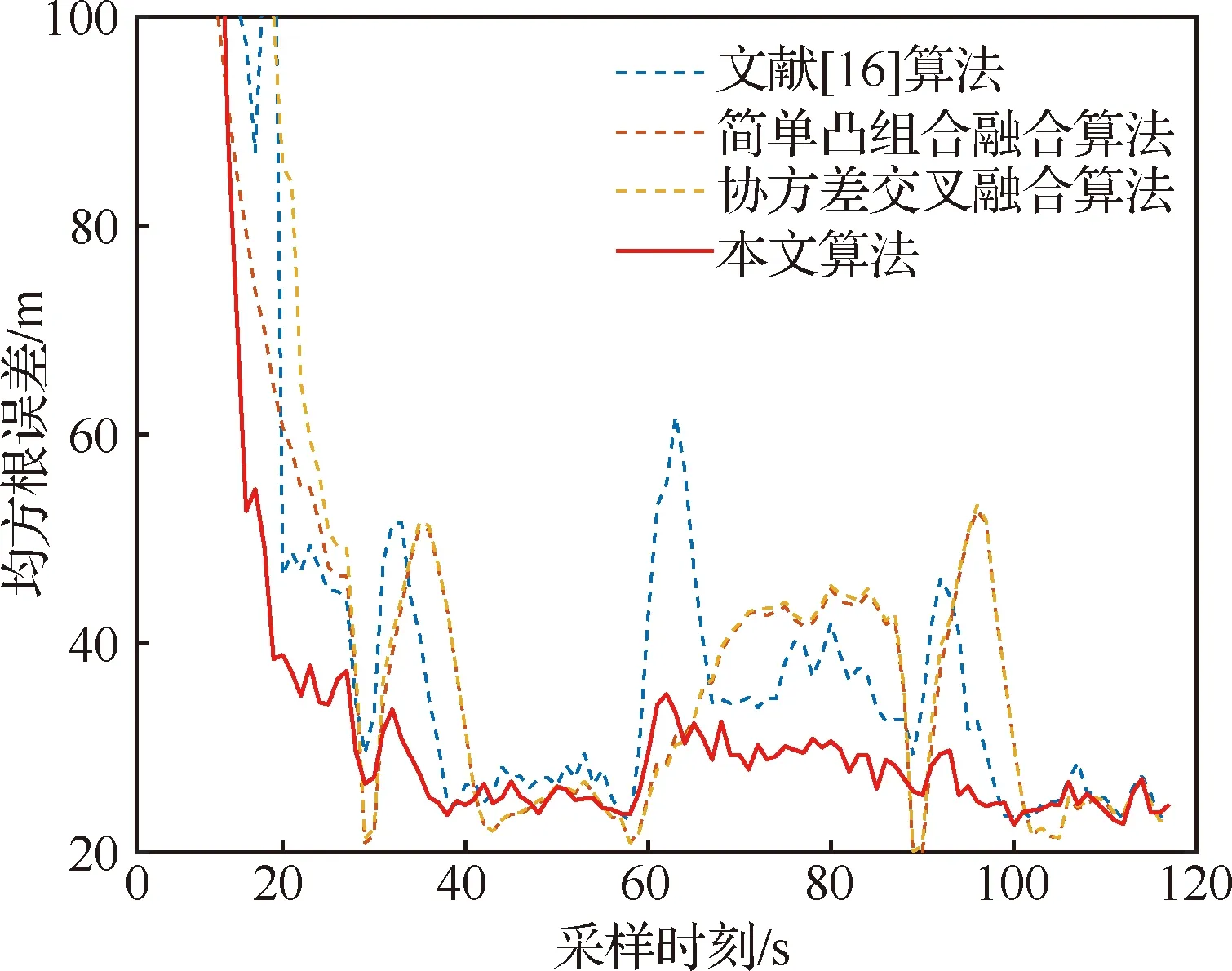
图5 4种算法的跟踪性能比较(传感器观测精度相同,测量丢失率不同)Fig.5 Comparison of tracking performance between four algorithms (sensor observafion accuracy is same, measurement loss is different)
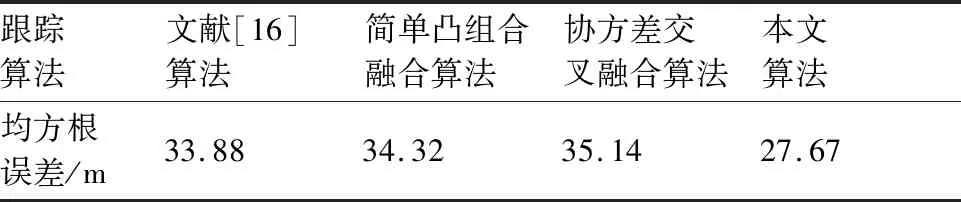
表3 4种算法的融合跟踪均方根误差比较(传感器观测精度相同,量测丢失率不同)Table 3 Comparison of root mean square error of fusion tracking between four algorithms (sensor observafion accuracy is same, measurement loss is different)
经仿真实验发现,当4部传感器的观测精度相同时,4种算法的跟踪性能随着传感器间量测丢失率的差别变大而降低,但本文算法的跟踪性能仍然优于其他3种算法的跟踪性能。
4.4 β值对本文算法跟踪性能的影响
此次实验采用4部观测精度相同但量测丢失率不同的传感器对同一目标进行观测。假设传感器的观测精度均为31.18 m,为了确保局部航迹信息熵的多样性,量测丢失率分别为20%、30%、40%和50%。改进的FCM算法的聚类类别数目设置为2,值分别设置为0.4、0.5、0.6、0.7、0.8 和0.9,在不同值情况下进行仿真实验,实验结果如表4所示。
从表4可知,当<0.6或>0.7时,随着取值的变小或变大,本文算法的跟踪性能逐渐降低。当在0.6~0.7之间取值时,本文算法的跟踪性能达到最好。

表4 β值与算法跟踪性能的关系Table 4 Relationship between β value and tracking performance of algorithm
4.5 本文算法跟踪性能与传感器数目的关系
假设多个传感器的观测精度均为31.18 m,量测丢失率均为25%,设置不同的传感器数目,分别为1、3、4、5、6和7,对20~120 s时间段的均方根误差进行比较。
从表5和图6可知,本文算法的跟踪性能随着传感器数目的增加而提升,与单传感器跟踪相比,当传感器数目分为3、5、7时,本文算法跟踪性能分别提升27.88%、30.10%和30.99%。经分析,本文算法进行类别划分时,其中一个类别包含的局部航迹质量最好,当多个传感器的观测精度和量测丢失率均相同时,随着传感器数目的增加,局部航迹的数目也会增加,该类别所包含的局部航迹的数目也可能会增加,使得航迹融合时利用的局部航迹的信息增加,而且这部分局部航迹的质量较好,利于提升系统航迹的质量。

表5 算法跟踪性能与传感器数目的关系Table 5 Relationship between tracking algorithm and number of sensors
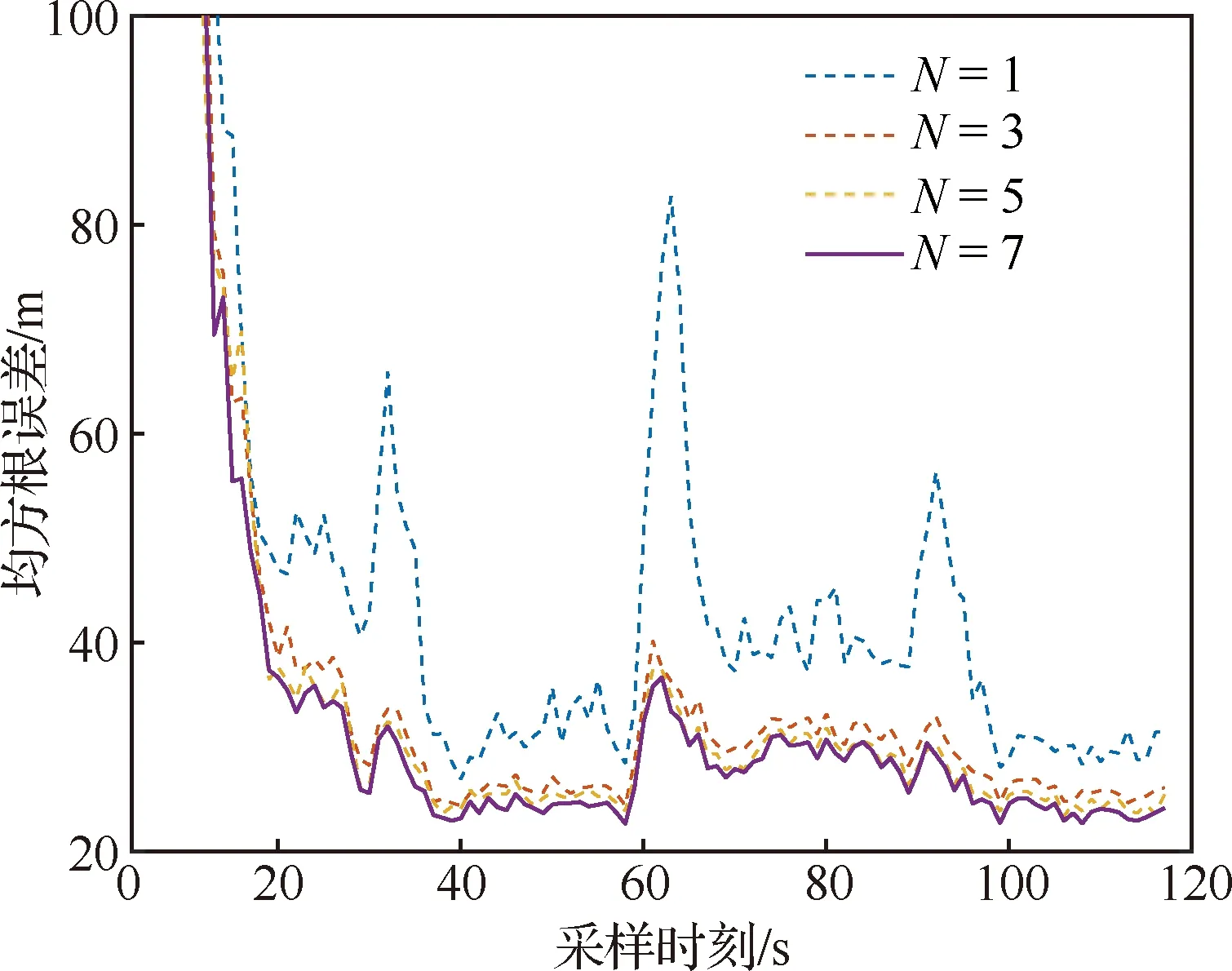
图6 传感器数目与算法跟踪性能的关系Fig.6 Relationship between number of sensors and tracking algorithm
综上,分布式多传感器融合系统跟踪机动目标时,当传感器间的观测精度存在差异且量测丢失率不同时,本文算法的跟踪性能始终优于单传感器、文献[16]算法、简单凸组合融合算法和协方差交叉融合算法的跟踪性能,并且在取值范围为0.6~0.7时,算法跟踪性能达到最优。此外,在传感器观测精度和量测丢失率相同时,该算法的跟踪性能随着传感器数目的增加而有所提升。
5 结 论
1) 本文对多传感器跟踪系统的局部航迹质量的度量、选择和融合进行了研究,利用改进的FCM算法对局部航迹进行聚类分析,利用信息熵和隶属度实现了局部航迹的选择和融合。
2) 典型实验验证多个传感器跟踪机动目标,在传感器的观测质量不均衡或不完全信息情况下,本文算法仍然能够获得较好的跟踪性能。
3) 在传感器观测精度和量测丢失率相同时,本文算法的跟踪性能随着传感器数目的增加有所提升。
