大型复杂构件机器人制孔技术研究进展
2022-07-04董松郑侃孟丹廖文和孙连军
董松,郑侃,孟丹,廖文和,孙连军
南京理工大学 机械工程学院,南京 210094
近年来,随着新一代航空装备的井喷式发展,飞行器的空间构型日趋复杂化与多样化,其大尺度、构型复杂、制造周期短等特点对中国航空航天先进制造水平提出了新的挑战。在大型复杂构件的机械连接中,连接孔是应力集中部位,连接孔的质量极大地影响连接件的疲劳寿命。连接结构的疲劳破坏是造成飞机失事的主要因素,据统计超过70%的飞机机体疲劳失效事故发生在结构连接部位,其中超过80%的疲劳裂纹产生于连接孔处。同时,一架大型飞行器需要在主体结构材料上钻出上百万个铆接孔或螺栓孔。所以提高制孔效率和加工质量是保证飞行器使用性能和可靠性的关键。
相比采用传统刚性型架的人工制孔方式,搭载末端执行器的机器人制孔系统具有柔性化程度高、工作空间大、容易实现自动化等优点。采用工业机器人取代人工对飞机部件进行钻孔逐渐成为研究热点。2015年中国发布了《中国制造2025》战略规划,将机器人制造特别是面向航空航天装备或大部件装配技术提升到战略层面。然而,机器人的弱刚度特性导致其在叠层结构的制孔中极易受钻削阻力的影响产生明显的颤振,不稳定的钻削状态加剧了CFRP孔壁撕裂、分层及铝合金毛刺等加工损伤,严重制约了机器人加工技术在航空制造企业的进一步应用和推广。因此,要实现工业机器人在大型复杂构件加工领域的高精、高效、高质量加工必须解决机器人加工颤振和钻削质量控制等问题。
从机器人制孔末端执行器设计技术、机器人制孔定位精度控制技术、机器人制孔工艺过程控制技术以及机器人制孔装备研制方面对机器人制孔技术现有研究成果进行归纳和总结,并提出了大型复杂构件机器人制孔技术的研究展望。
1 末端执行器设计技术
随着集成技术的快速发展和机器人仿真技术的逐渐成熟,工业机器人位置精度、负载能力和可控性能得到了较大提升。其中,机器人制孔系统是一种典型的机器人自动化加工设备,因其具有柔性好、集成化程度高、空间利用充分等优势,被广泛应用于机翼、尾翼等构件中空间狭小部位的制孔,主要包括钻孔、镗孔、锪孔、铣孔等,并取得了一系列的研究成果。国内外典型的工业机器人包括ABB公司的IRB系列机器人;KUKA公司的KR系列机器人;FANUC公司的ARC、R、M系列机器人;YSKAWA公司的MC、MPL、SIA系列机器人;埃斯顿公司的ER系列机器人;新松公司的SR、T系列机器人;埃夫特公司的ER系列机器人;新时达公司的SR系列机器人等。末端执行器的研制是机器人加工系统开发的首要任务。因此本节将对制孔末端执行器设计技术研究现状进行梳理。末端执行器设计的核心技术主要包括多功能模块集成技术、多传感器信息融合技术及基于在线监测的反馈调节技术。
美国Electroimpact公司与空客公司联合设计的ONCE机器人自动钻削系统的末端执行器,如图1所示,其功能模块布局紧凑,包括主轴进给单元、外框架单元、压紧单元、以及各类连接件等。同时,该设备集成了多种传感器以及压力角等辅助模块,采用同步相机实现对设备基准的检测,利用光电传感器对多深度复合孔进行分析,利用压力脚对工件施加压紧力避免加工过程的末端振动。该系统搭载于KUKA350-2工业机器人,完成了波音F/A-18E/F翼面类部件的紧固孔加工任务,对铝、钛和复合材料板料上直径1~6 mm的孔进行钻锪加工,基于该设备波音公司的襟翼月产量高达8个。Novator公司在其轨道钻削专利技术的基础上研发了Orbital E-D100自动钻削系统,如图2所示,该设备功能全面,集成了压紧、钻削、真空吸屑等功能模块,重量为130 kg,经使用证明,具备较高的加工可靠性。加工复合材料和钛合金时具有较高的加工效率,入口和出口处的毛刺、分层等缺陷也得到有效控制,该装置方便安装至多自由度机器人对飞机上大型构件连接孔进行加工。可以发现,目前国外末端执行器的设计技术已较为成熟,基本掌握了多功能模块集成设计、多传感器融合信息处理以及基于在线监测的反馈调节等关键技术,可在航空制造企业中落地使用。
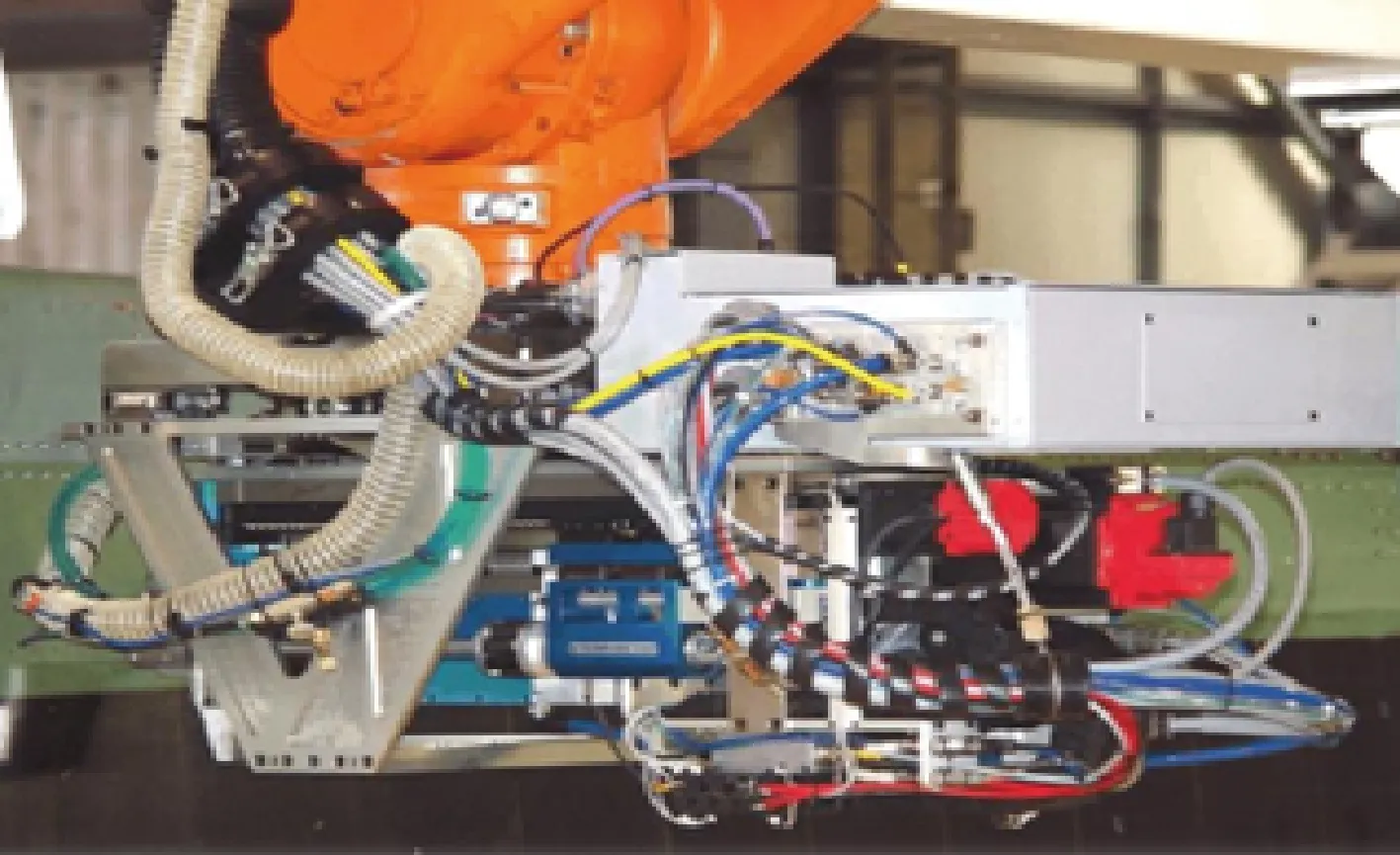
图1 ONCE末端执行器[16]Fig.1 ONCE end-effector[16]
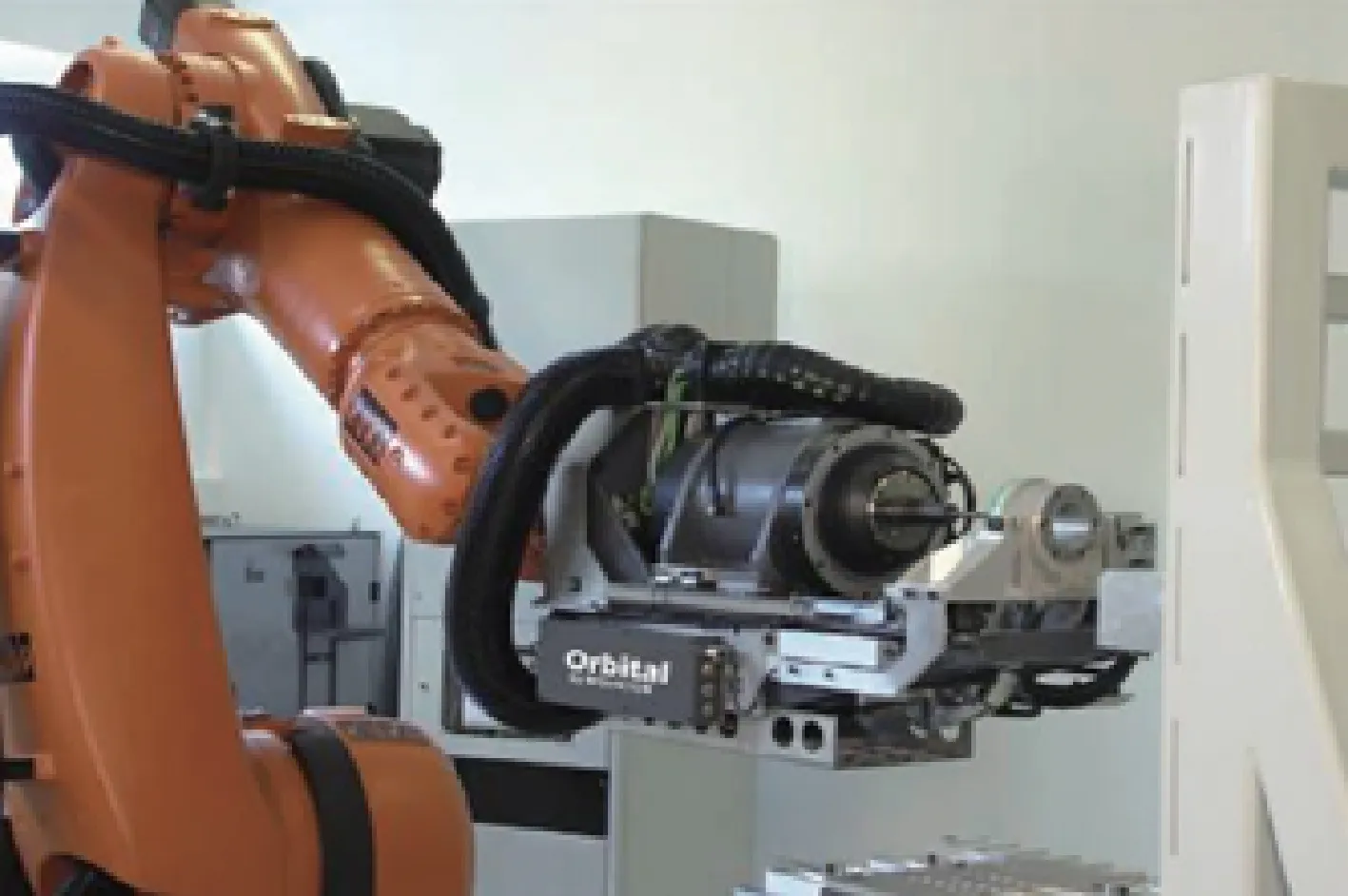
图2 Novator公司螺旋铣孔系统[18]Fig.2 Spiral hole-milling system of Novator[18]
目前,面对国外末端执行器等机器人加工核心部件的技术封锁,各大高校开展了自主研发的探索。浙江大学柯映林教授团队研发了自动钻铆末端执行器,基于多传感器在线检测技术可智能识别并检测定位特征、快速更换钻头和铆钉。同时,该系统基本实现了多功能模块的集成,可以完成制孔、锪窝、除尘、插钉等操作,是目前国内较为完备的自动钻铆解决方案。在在线检测的反馈调节技术方面,采用了一种基于激光跟踪仪的闭环反馈控制方法,补偿了由于机器人的动、静态误差以及坐标系标定和坐标系转换过程中的累计误差,为提高制孔和铆接的定位精度提供了技术支撑。此外,该团队还研发了一种螺旋铣孔末端执行器用于制孔,利用齿轮圆弧齿条传动能实现主轴的左右摆动并结合自转、公转完成锪椭圆窝的加工方式,设计了带有闭环反馈的运动机构实现5 mm以内偏心量的精确自动调节,如图3所示。
图3 浙江大学螺旋铣孔末端执行器[21]Fig.3 End-effector of spiral hole-milling of Zhejiang University[21]
试验结果表明,孔的位置精度达到±0.5 mm,法向偏差优于0.5°,锪窝深度精度达到0.02 mm。南京航空航天大学廖文和教授团队针对机器人自动钻铆系统的特点和实际需求,研究开发了一套搭载在线检测功能的机器人自动钻铆系统,实现了对钻铆过程加工质量的在线检测,保证了航空零部件钻铆加工的质量要求,实现了末端执行器设计核心技术的突破。
针对末端执行器的多功能模块集成设计技术,国内学者也开展了大量研究。大连交通大学设计了一种新型可用于机器人制孔系统的螺旋铣孔末端执行器,该末端执行器通过直线调偏方式调整偏心量,并采用双螺母结构消隙保证了调节精度。包络直径与孔理论直径误差值不超过1 μm 低于直径10~20 mm孔的 IT8等级公差。自转速度与公转速度对包络直径影响非常小,满足孔的尺寸精度要求。沈阳航空航天大学杨浩然设计了一种新的机器人钻铆末端执行器并使用五自由度运动补偿和柔性压紧机构分别提高位置精度和法向精度。在、方向上使用双直线电机布局,并对双直线电机采用同步控制,提升了位置精度。金洁等设计了用于自动钻铆复合加工系统的末端执行器,如图4所示,搭建加工试验平台测试了末端执行器关键零部件的性能,提出了减重优化方法,并进行了一系列的制孔铆接试验。试验结果表明,该末端执行器可实现自动钻铆加工功能,保证制孔铆接加工质量,满足自动钻铆加工要求。

图4 自动钻铆末端执行器[25]Fig.4 Automatic drilling and riveting end effector[25]
综上所述,国外对于机器人制孔技术及末端执行器的研究较早,有关技术已经比较成熟,可以投入实际生产使用,关键技术目前处于封锁状态。
而国内的研究起步较晚,目前还没有形成成熟的末端执行器设计技术,虽然进展较快,但大多仍处于理论研究和实验测试阶段,相比国外还是存在很大的不足。末端执行器的研究和应用仍是一项长期且艰巨的任务。
2 定位精度控制
近年来,机器人以其高度柔性化和低成本等优势在飞机数字化装配领域引起了大量关注。机器人制孔取代传统手工操作将极大地提高制孔质量、效率,并能将工人从单调、恶劣的工作环境中解放出来。但是机器人自身的结构因素导致它的加工精度不高,机器人制孔的精度一方面受到机械加工精度、装配误差、传动误差、磨损、构型等几何误差因素的影响,另一方面也受到机械臂的柔性、负载变化、振动等非几何因素的影响。因此,诸多学者提出了提高机器人制孔系统精度的方法。重复定位精度和绝对定位精度是机器人的重要指标。机器人的重复精度普遍较高可满足制孔需求,如KUKA-KR210工业机器人重复精度可达±0.06 mm。机器人绝对定位精度较低,一般只有1~3 mm,而加工过程对于绝对定位精度的要求较高,尤其在航空航天领域,要求达到±0.5 mm 以内。
2.1 国外研究现状
国外对于机器人制孔的研究较早,基于工业机器人的自动钻铆技术已经在飞机零部件上实现了应用。美国的EI公司和德国的宝捷公司是工业机器人制造的代表公司,他们的产品实用性较高。美国的EI公司于2002年已经研发出了一款带有多功能末端执行器的自动钻孔系统。其在2014年设计出了如图5所示的自动钻孔系统,通过安装在机器人外部六个轴上的光栅尺,采用二级反馈的精度补偿方法,使得机器人最终的绝对定位精度达到±0.25 mm。德国宝捷公司针对单通道飞机货舱门高精度制孔需求,设计了一款集制孔和钻铆于一体的全自动新型智能系统RACE自动钻铆系统,末端执行系统通过PLC控制,同时整个系统集成了精度补偿算法,绝对定位精度达±0. 3 mm。

图5 EI高精度自动钻孔系统[28]Fig.5 High precision automatic drilling system of EI[28]
美国克里斯托弗新港大学Wang等提出了一种基于神经网络和摄像机测量系统的机器人机械手标定方法。利用神经网络算法来估计机器人机械手标定过程中的位置误差,首先通过安装在待校准机器人末端执行器上的摄像机获取校准空间内各个网格点的位置误差,然后通过训练神经网络模型得到的位置误差对目标姿态进行补偿,与传统的双线性分析法相比,精度大大提高。Pervaiz等针对机器人钻孔的位置精度问题,设计了一种用于机械钻削参考校准和正交校准的多传感器测量系统。它使机器人能够准确测量工件的位置和姿态,并建立钻孔的参考框架。由于标定精度和测量分辨率,多传感器测量系统引入的误差可以忽略不计,钻孔过程的精度仅由机器人的6D位姿精度决定。提高了机器人6D位姿精度,避免了钳口滑移,可以实现位置偏差小于0.1 mm,垂直偏差小于 0.2°,可以大大提高钻削过程中的机器人位置精度,为实现机器人钻孔过程的最高精度提供了条件。Ochoa和Cortesão利用优化钻孔的过程稳定性提高钻孔的精度,设计了一种阻抗控制结构。使用直径为0.6、0.5、0.4 mm的钻头已成功地在垂直和非垂直插入的多个模具上开孔,利用计算转矩技术对刀架进行了位姿优化和阻抗控制设计。
2.2 国内研究现状
国内对于机器人自动钻铆系统的研究起步较晚,目前国内大部分的研究主要依靠具有航空航天类背景的部分高校和制造企业。其中北京航空航天大学、浙江大学、南京航空航天大学等高校研究比较深入,有些成果已经投入了实际加工使用。南京航空航天大学田威教授团队为航空工业成都飞机工业(集团)有限责任公司研发的一款机器人自动制孔系统较为成熟,已经能够在实际生产加工中应用,如图6所示。该系统采用倍福(Beckoff)公司EtherCAT通信协议,通过软PLC将硬件与工控系统连接起来,实现信息的传输。以KUKA机器人为载体,通过在机器人末端集成执行器,使用精度补偿算法提高机器人的绝对定位精度,利用激光位移传感器进行机器人法向位姿的调整。该系统的绝对定位精度为±0.3 mm,法向偏差为0.3°,制孔效率可达到3~4个/min。此外他们又提出一种工业机器人作业误差分级补偿策略,将工业机器人分为空载状态与负载状态,通过分析不同的误差来源提出相应的误差补偿方法,试验结果表明,负载状态下的机器人定位误差从0.959 mm 降低到0.217 mm。

图6 南京航空航天大学自动制孔系统[36]Fig.6 Automatic drilling system of NUAA [36]
浙江大学基于KUKA机器人使用多功能末端执行器来执行制孔、铆接等装配任务,如图7所示。采用激光跟踪仪作为跟踪和反馈设备,使用VC++编写了一套控制软件,对中央处理器、机器人、末端执行器和激光跟踪仪组成的全闭环系统实现实时控制,使得末端的定位精度更高。但是激光跟踪仪必须时刻配备在现场,导致整套系统更加复杂,造价更高。此外,他们研发了一种螺旋铣孔末端执行器用于制孔,试验结果表明,孔的位置精度达到±0.5 mm,法相偏差优于0.5°,锪窝深度精度达到0.02 mm。而北京航空航天大学所研究的集成控制系统主要完成制孔铆接功能,集成控制系统基于主从架构,利用RS232的通信方式实现功能,结构较为简单。

图7 浙江大学研制的自动钻铆设备[39]Fig.7 Automatic drilling and riveting equipment developed by Zhejiang University[39]
上海大学Shen等则是采用加工前机器人钻削系统刚度优化和加工过程中孔位误差补偿相结合的方法。首先,通过优化电机主轴与机器人端面法兰的安装角度,获得机器人钻孔系统在某一加工任务中的最大工作刚度,为孔位的高精度加工奠定了基础。然后,根据待钻孔的位置,考虑机器人末端受力变形和机器人绝对定位误差进行误差补偿。结果表明,在所有机器人钻孔试验中,孔位误差均显著降低,平均降幅达84.45%,证明该方法是提高机器人钻孔定位精度的一种实用有效的方法。
3 工艺过程控制技术
3.1 稳定性
机器人制孔稳定性研究主要包括稳定性线下预测与参数优化、局部刚度强化及颤振在线监测与反馈调节3个方面。在机器人制孔稳定性预测方面,南京航空航天大学沈孝栋针对普通麻花钻结构,给定几组机器人姿态,在保持钻头高度位置和进给方向一致的情况下进行实验,实验结果如图8所示,结果显示在不同参数组合情况下,主轴转速越高,稳定性越好。在 Matlab/Simulink 中建立积分反馈模型,并编制相应的运行程序,分析钻孔过程中的机器人系统的各种变化,如关节变形、末端颤动等,这些变化影响了制孔的轴线精度、引起钻削力的波动,钻削力波动同样又作用于机器人末端,如此形成闭环系统,分析系统的稳定性,并计算机器人钻削系统的振动频率。南京理工大学廖文和教授团队通过在机器人钻削过程中施加超声场能实现了横向颤振的抑制和铝板出口毛刺的降低,如图9所示。实验结果表明超声场能摄入后机器人钻削稳定性提高了67%,铝板出口毛刺降幅超过40%。
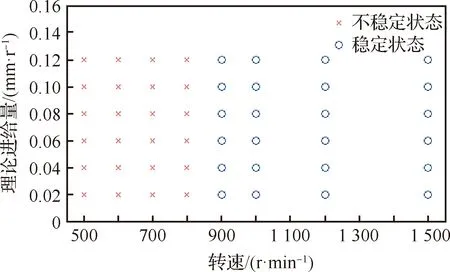
图8 不同参数组合时系统的稳定性状态[43]Fig.8 Stability state of system for different parameters combination[43]
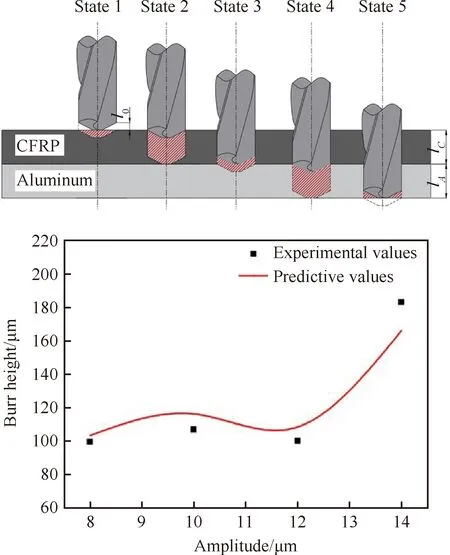
图9 机器人旋转超声钻削CFRP/Al叠层构件[44]Fig.9 Robotic rotary ultrasonic drilling of CFRP/Al laminated components[44]
通过局部刚度强化提升钻削系统稳定性的研究方面,浙江大学方强等针对压脚对镗孔稳定性的影响进行研究,分别绘制了压脚压力处于0.3、0.1、0 MPa 三种情况下系统的稳定性叶瓣图,结果如图10所示。机器人镗孔系统的稳定镗削深度随着气动压脚的引入和压脚压力的增大而进一步拓展,系统的加工稳定性增强。在实际机器人镗孔应用中,考虑到过大的压脚压力使机器人产生过大的静态变形对机器人镗孔精度的影响,实际加工过程中一般设定压脚压力为0.3 MPa,可满足加工稳定要求。von Drigalski等设计了一款如图11所示的具有高摩擦减振脚的末端执行器,在钻削过程中减震脚压在工件上,以增加稳定性,单独的线性执行器,用以推进钻头。此结构减轻了机器人手臂推进和稳定钻头的任务,机器人的任务仅是定位和握住末端执行器。但由于减振装置过于复杂,容易限制末端的自由度、增加额外负载,且成本过高。浙江大学柯映林教授团队研究发现在机器人镗孔加工过程中,产生的振动是来自机器人本身的带位移反馈的受迫振动,而不是传统数控机床中镗杆的振动。据此提出了一种利用压力角抑制机器人在镗孔过程中的振动的方法。机器人刚度模型为椭圆,如图12所示,在和方向上,刚度的最大值为,最小值为。以和为坐标轴时,机器人刚度矩阵为对角线,可以消除耦合问题。利用压力脚抑制机器人在镗孔过程中的振动。结果表明,当压脚与工件之间的摩擦力足够大时,可以完全抑制机器人的振动。
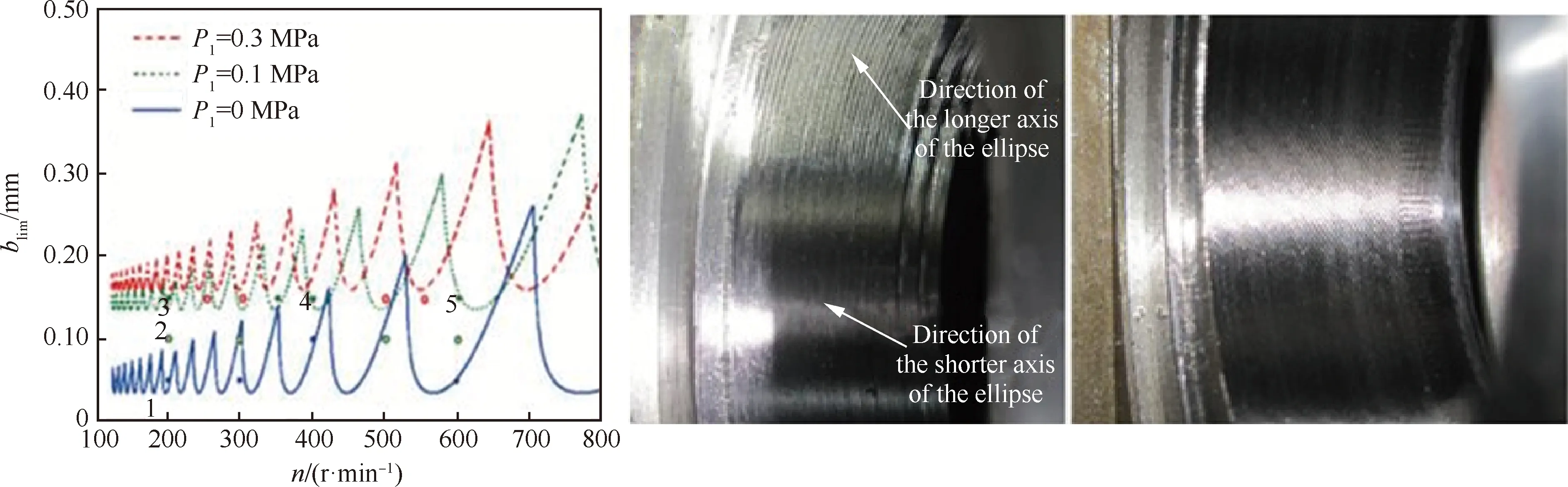
图10 压脚作用下机器人镗孔稳定性分析[45]Fig.10 Stability analysis of robotic boring under presser foot action[45]
图11 具有高摩擦减振脚的末端执行器[46]Fig.11 End-effector with high-friction vibration-damping feet[46]
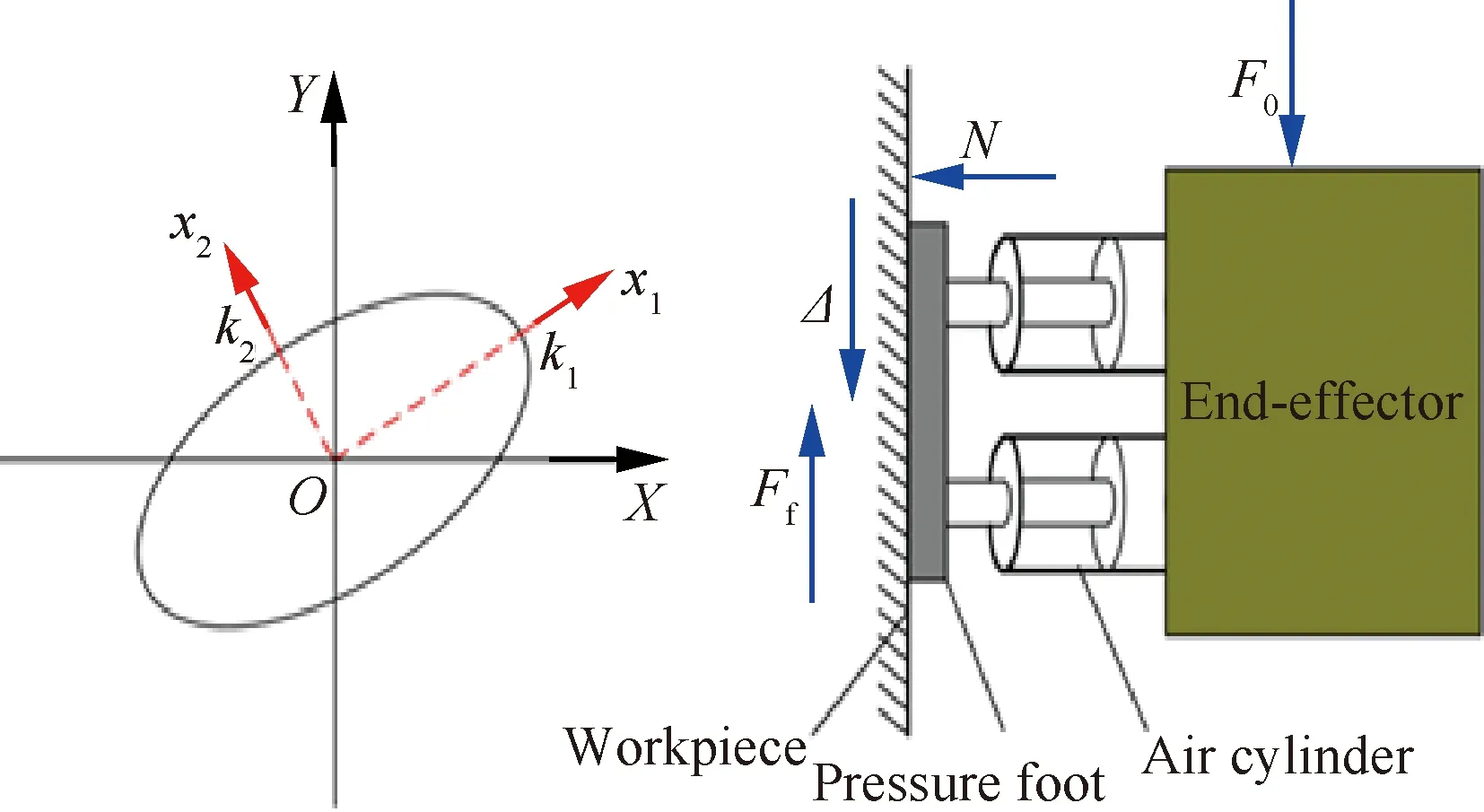
图12 机器人镗孔刚度分析[20]Fig.12 Stiffness analysis of robotic Boring[20]
在机器人制孔颤振监测与反馈调节方面,上海交通大学刘成良教授团队提出了一种基于同步提取变换的早期颤振识别方法,首先通过同步提取变换(SET)获得振动信号的高分辨率时频表示。然后,将振动信号分成有限个频带,保留SET的最大系数,得到相应的子信号。在此基础上,利用统计能量熵捕获颤振跃迁过程中能量分布的不均匀变化,能够有效地检测出颤振的早期状态。同时,如图13所示,在= 0.205 s左右出现了较为明显的颤振频率,基于同步挤压的方法检测到= 0.183 s时刻的颤振。浙江大学董辉跃等针对机器人精镗飞机交点孔时容易出现颤振,影响加工表面质量的问题,通过分析颤振发生时的压脚位移信号,提出了一种经验模态分模态分解和HHT方法的识别和预测机器人镗孔系统颤振的新方法,通过两次正交实验比较各IMF的Hilbert-Huang谱发现:当出现颤振时第一个IMF的变化最明显。从能量的角度来看,这种变化是由刀具与工件之间的自激振动产生的。因此,可以将第一个IMF作为识别能量最大的机器人镗削颤振的主体。稳定镗孔过程中,瞬时频率基本随时间保持不变,而在颤振发生时,瞬时频率由低到高变化。随着时间推移,颤振频率主要集中在500 Hz,系统逐渐达到动态平衡。基于该方法可实现最多0.6 s的颤振信号提前获取。此外,机器人位姿的变化对机器人工作空间及刀尖处动力学特性有重要的影响,从而加剧了稳定性解析的复杂程度,在线调整机器人切削参数时应同时改变机器人位姿参数以避免加工颤振。

图13 振动信号的检测结果及相应的谱图[48]Fig.13 Detection results of vibration signals and the corresponding spectra[48]
3.2 钻削质量控制
目前,针对机器人钻削定位精度的研究已相对成熟,但航空制造企业更关注的目标为机器人钻削的孔精度及加工质量,如孔径偏差、圆度、表面粗糙度及出口毛刺高度等技术指标。部分学者从提高机器人制孔系统刚度从而保证钻削质量的角度进行了研究。Tian等从机器人的弱刚度特性出发建立了预压力作用下的等效刚度模型,基于刚度提升系数定量评价了预压力作用下的等效刚度。提出了机器人钻削姿态与钻削力的匹配准则,并在稳定加工条件下预测了压力的最优值。Dong等针对机器人钻削叠层构件的出口毛刺问题,提出采用超声振动加工与机器人钻削相结合的方法来提升钻削稳定性并抑制毛刺尺寸。同时,结合毛刺形成理论、薄板变形理论及能量守恒定律,构建了包含机器人钻削参数、超声加工参数及材料属性等因素的毛刺高度理论预测模型,揭示了超声振动对叠层结构出口毛刺的抑制作用。出口毛刺实验结果表明,超声振动加工的引入有效降低了毛刺高度,毛刺高度最大降幅达到了41.2%,如图14所示。费少华等针对解决机器人自动制孔过程中由于飞机壁板变形和振动引起的锪孔深度控制问题,提出将末端执行器压脚位移作为实时补偿信号的制孔进给量全闭环控制系统设计方法,该系统可将加工孔的锪孔深度误差控制在0.02 mm以内,表面粗糙度达到0.8 μm。
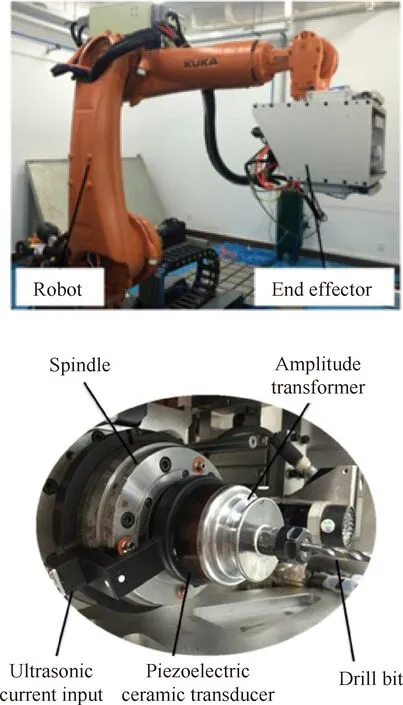
图14 机器人超声钻削毛刺高度研究[52]Fig.14 Burr height study of robotic ultrasonic drilling[52]
4 装备研制
4.1 工业机器人制孔装备
美国Electroimpact公司与空客公司合作研制了一套机器人自动钻削系统(ONCE),用于波音超级大黄蜂机翼后缘襟翼的钻孔及锪窝工作,在厚度为25.4 mm的钛合金飞机部件上加工直径为9.5 mm孔时,将锪窝深度误差控制在0.064 mm以内。ONCE系统以KUKA机器人为基础,由机械臂末端携带多功能末端执行器组成加工主体,并配合视觉检测单元提升制孔精度,如图15所示,在其可达空间内能完成钻孔、锪孔等工作,其对钛合金、铝合金和CFRP等航空材料进行制孔的精度能够达到H8,加工孔径范围为3.73 mm至9.525 mm,孔的位置偏差小于±1.5 mm。

图15 ONCE系统[54]Fig.15 ONCE system[54]
德国宝捷为欧洲直升机公司研发了RACE系统,如图16所示。该系统由机器人携带多功能末端执行器构成,其定位精度比ONCE更高,定位误差小于±0.3 mm,并将其用于应用于B737内侧襟翼2150多个孔的加工,实现了自动制孔、循环铆接以及涂胶密封等功能。瑞典Novator公司最早开始螺旋铣孔专用加工设备的设计,针对飞机装配中叠层结构的制孔需求,开发了一款E-D100型螺旋铣孔末端执行器,以工业机器人为搭载平台,并通过HSK32刀柄装夹刀具,偏心调节范围0~5 mm,最大制孔直径25 mm,重量约130 kg。Novator公司将其使用于钛合金和复合材料上进行制孔测试。巴西航空理工学院的Eguti和Trabasso在工业机器人的基础上研制了一种螺旋铣孔多功能末端执行器,如图17所示。该机器人铣孔系统搭配了压脚、视觉相机和法向检测装置,用启动马达来作为主轴驱动力。制孔直径由铣刀直径和偏心量决定,偏心量则通过固定螺钉调整衬垫位置调节。机器人螺旋铣孔验证实验结果表明,在进给速度为50 mm/min时孔径偏差最小,孔径精度能够达到±13 μm。Frommknecht等将多传感器测量系统应用于工业机器人,如图18所示。传感器系统可以测量出机器人相对于工件的六维姿态并建立起机器人的参考坐标系。利用多传感器辅助测量系统,通过使机器人接近钻孔点并与工件进行正交对准实现机器人末端较高的定位精度和较小的垂直度偏差,机器人钻孔精度得到较大程度地提高。国外的机器人制孔设备主要形式为以KUKA等专业机器人为载体,并搭载专用执行末端和算法来搭建。多数的主控系统能将孔的定位误差控制在±0.3 mm,且制孔效率较高。

图16 RACE系统[56]Fig.16 RACE system[56]

图17 Eguti和Trabasso研制的螺旋铣孔系统[58]Fig.17 Spiral hole-milling system developed by Eguti and Trabasso[58]
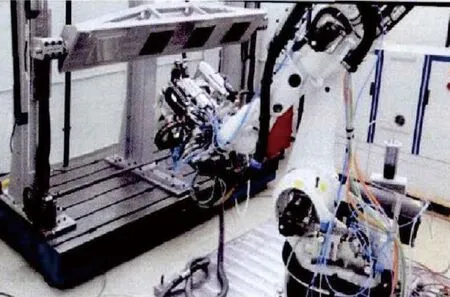
图18 Frommknecht研制的钻铆系统[59]Fig.18 Drilling and riveting system developed by Frommknecht[59]
近年来,国内的各大飞机制造厂商纷纷与研究院所和高校合作研发机器人制孔系统。北京航空航天大学与航空工业沈飞股份有限公司共同研制了一套制孔末端执行器用于飞机部件的加工,初步具备了各项基本功能,搭建机器人自动制孔系统,并研究了末端执行器的安装方式对机器人可达性、操作性和关节使用度等性能的影响,用于铝合金、钛合金及叠层材料的制孔。通过切削力反馈优化主轴转速和进给速度等参数,在7075-T6铝合金板上加工6 mm孔时,可将孔径误差控制在0.04 mm以内,孔定位精度达0.3 mm,并且每分钟制孔数量能达到4个每分钟。南京航空航天大学田威教授团队与航空工业成都飞机工业(集团)有限责任公司合作研发了机器人自动制孔系统。该系统以KUKA机器人为载体,在机器人末端集成钻削执行器。该系统的绝对定位精度为±0.3 mm,法向偏差为0.3°,制孔效率可达到3~4个/min。浙江大学在交点孔的精镗加工方式上,设计了一种配合安装在工业机器人上的专用制孔执行器,如图19和图20所示,并且对机器人的弱刚性、定位差、镗孔颤振等问题进行了研究;应用了位姿优化、颤振抑制和误差补偿等关键技术来应对机器人加工的问题。
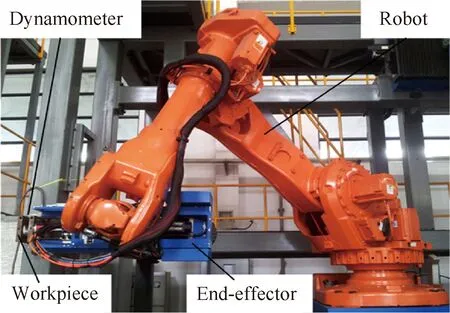
图19 浙江大学机器人镗孔系统[63]Fig.19 Robot boring system of Zhejiang University[63]
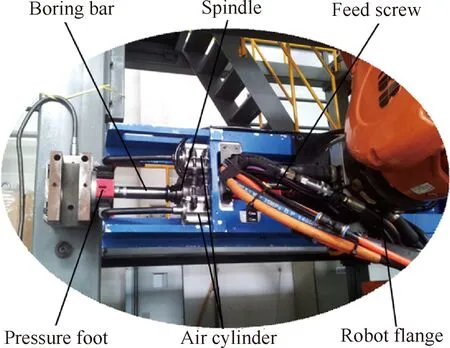
图20 镗孔执行器[63]Fig.20 Boring end-effector[63]
北京航空制造工程研究所研制了机器人数字化钻铆系统,可实现制孔和铆接等功能,如图21 所示。东北大学设计制造了五自由度机器人,如图22所示,机器人手腕由俯仰和倾斜两个自由度组成。机器人手臂采用平行四边形框架,由直线电动气缸沿对角线方向驱动。滚珠丝杠采用带预紧力的双丝杠螺母,以消除反向侧隙。此外,腰部和手腕各自由度采用双电机驱动,采用抗侧隙控制方法消除齿轮侧隙。钻削加工实验表明,该机器人可以提供比工业机器人更好的刚度,有利于提高机器人钻孔质量。湖北工业大学夏自祥等将机器人激光制孔与视觉技术结合,设计了基于视觉引导的机器人激光制孔控制系统,相对传统制孔系统,此系统不需要夹具,且精度满足要求。

图21 北京航空制造工程研究所研制的机器人钻铆系统[64]Fig.21 Robot drilling and riveting system developed by AVIC Manufacturing Institute[64]
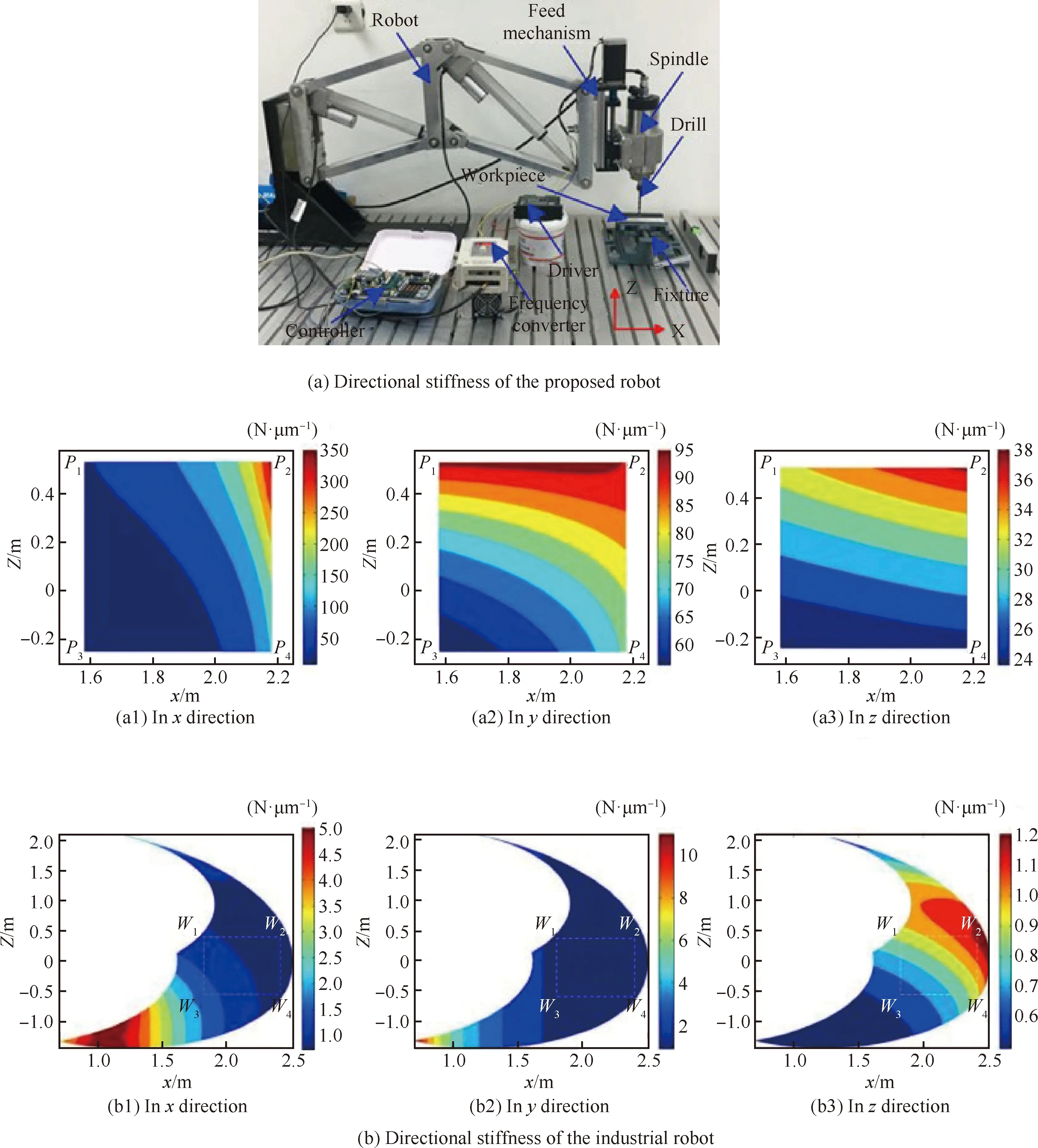
图22 五自由度机器人与工业机器人刚度对比[65]Fig.22 Stiffness comparison between 5-DOF robot and industrial robot[65]
目前国内的机器人制孔设备大多是高等院校研制的,受制于工业机器人的来源,广泛使用了国外的工业机器人平台。形成了国内仅研究末端执行器和控制算法的局面,几乎无法从机器人载体和关键核心部件(如减速器、伺服系统和控制器)上进行新方法和新技术的突破,且制孔精度较国外先进水平仍有差距。另外,整体制孔设备的自动化程度也相对较低,通常需要伴随着人员的跟随操作,高自动化制孔设备亟待深入开发和研究。
4.2 柔性导轨及爬行机器人制孔装备
柔性导轨自动钻孔设备主要在飞机机身、机翼等大型零件的装配中使用。柔性导轨利用真空吸盘附着于机身、机翼等平缓大曲面上并进行自动钻铆,制孔执行器相对于导轨运动并完成制孔作业,具有效率高、方便灵活等优点。当导轨完成固定后,需要借助定位手段来保证制孔的精度,且在完成一次导轨的铺设之后就完成覆盖范围内的所有制孔任务;重新铺设导轨和完成精度定位后,就可进行下一工作区域的制孔任务。
美国的AIT(Advanced Integration Technology)和EI为国外较为领先的柔性导轨设备的主要生产公司。AIT公司开发的柔性轨钻铆设备,在波音F/A-18E/F机翼及空客A340平尾壁板的钻铆作业中被大量使用,其包含3个移动轴和一个转动轴,如图23所示。EI公司和波音联合开发的柔性轨道制孔系统,如图24所示,用于机身段对接孔位的制孔,能进行法向检测及校准和压力脚压紧,具有真空吸附组合式柔性导轨以及五轴制孔执行器。国内的北京航空制造工程研究所研发了一台型号为BAA300的柔性导轨制孔设备,如图25所示,在经过设备的调试后制孔合格率为97.7%,且制孔精度为H9,能应用于ARJ21和C919机身段对接区的自动制孔。上海交通大学研制了一台柔性导轨制孔机器人,如图26所示,研究了柔性导轨变形而带来的间隙误差。并开展了工艺试验,分析了叠层板钻孔时钻削参数对毛刺的影响,为切削工艺优化提供了基础。湖北工业大学冯康瑞针对大曲率、表面情况复杂的汽车车身覆盖件机器人激光切割运动控制难度高、生产效率低以及机器人激光切割不能满足小孔加工精度要求的问题,设计了高精度运动控制器和十字滑台组成数控切割微系统,可切割直径为0.5 mm的小圆,精度达到0.03 mm,运行速度可达18 m/min,极大提高了生产效率。
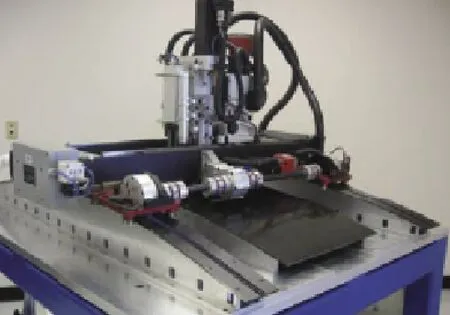
图23 AIT公司柔性导轨系统[67]Fig.23 Flexible rail system of AIT[67]
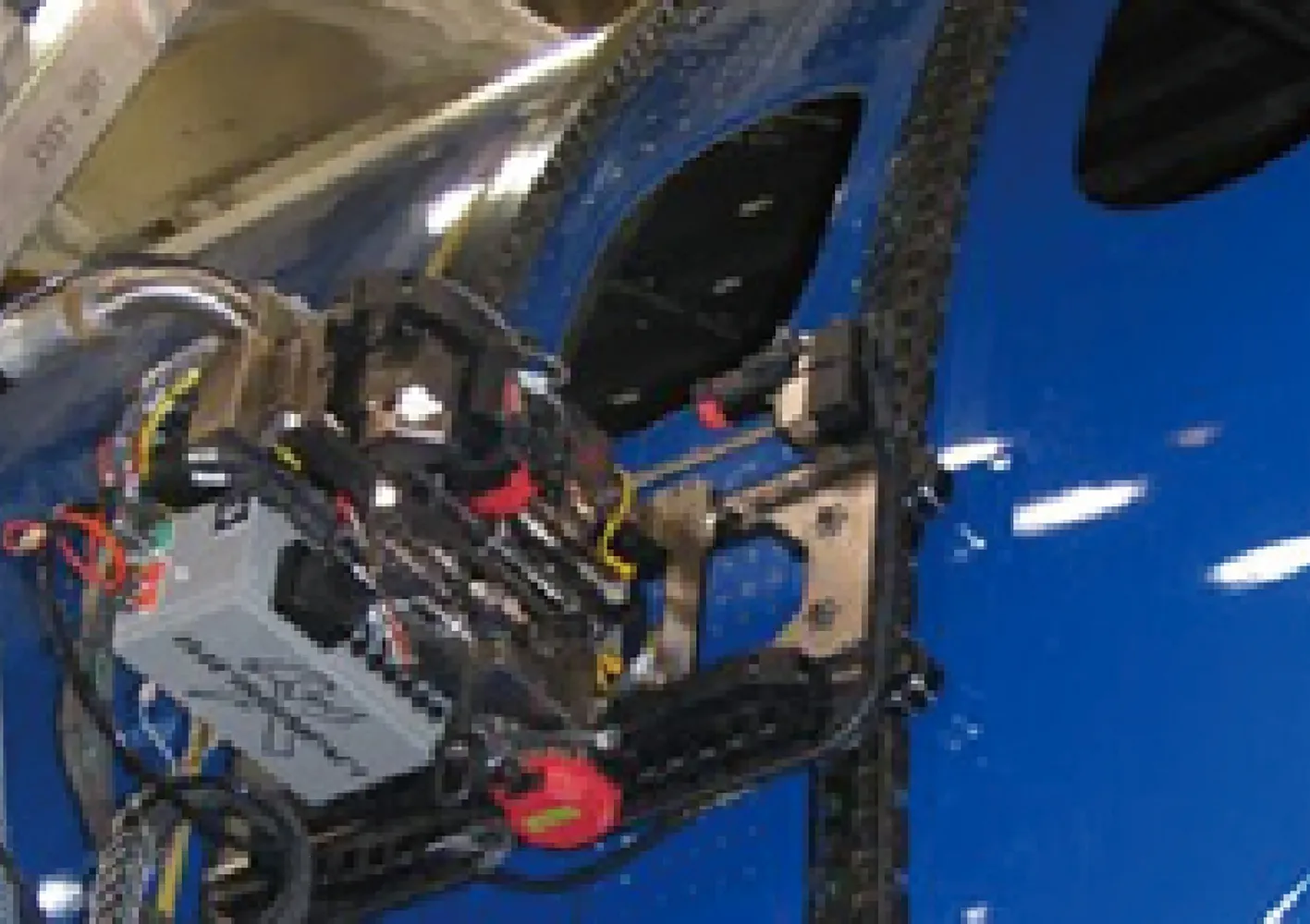
图24 EI公司柔性导轨系统[67]Fig.24 Flexible rail system of EI[67]
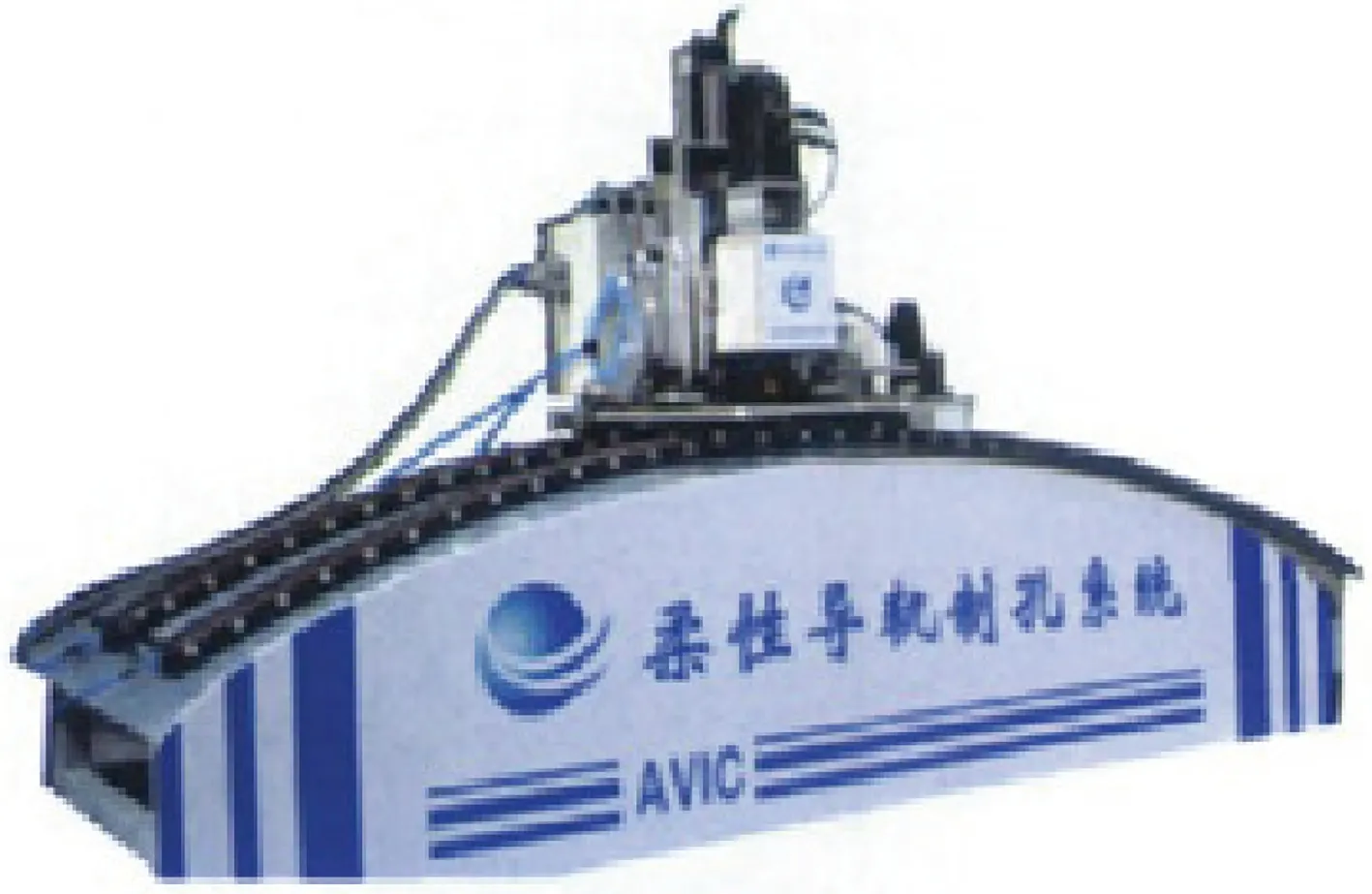
图25 BAA300柔性导轨自动制孔设备[68]Fig.25 BAA300 flexible track automatic drilling equipment[68]
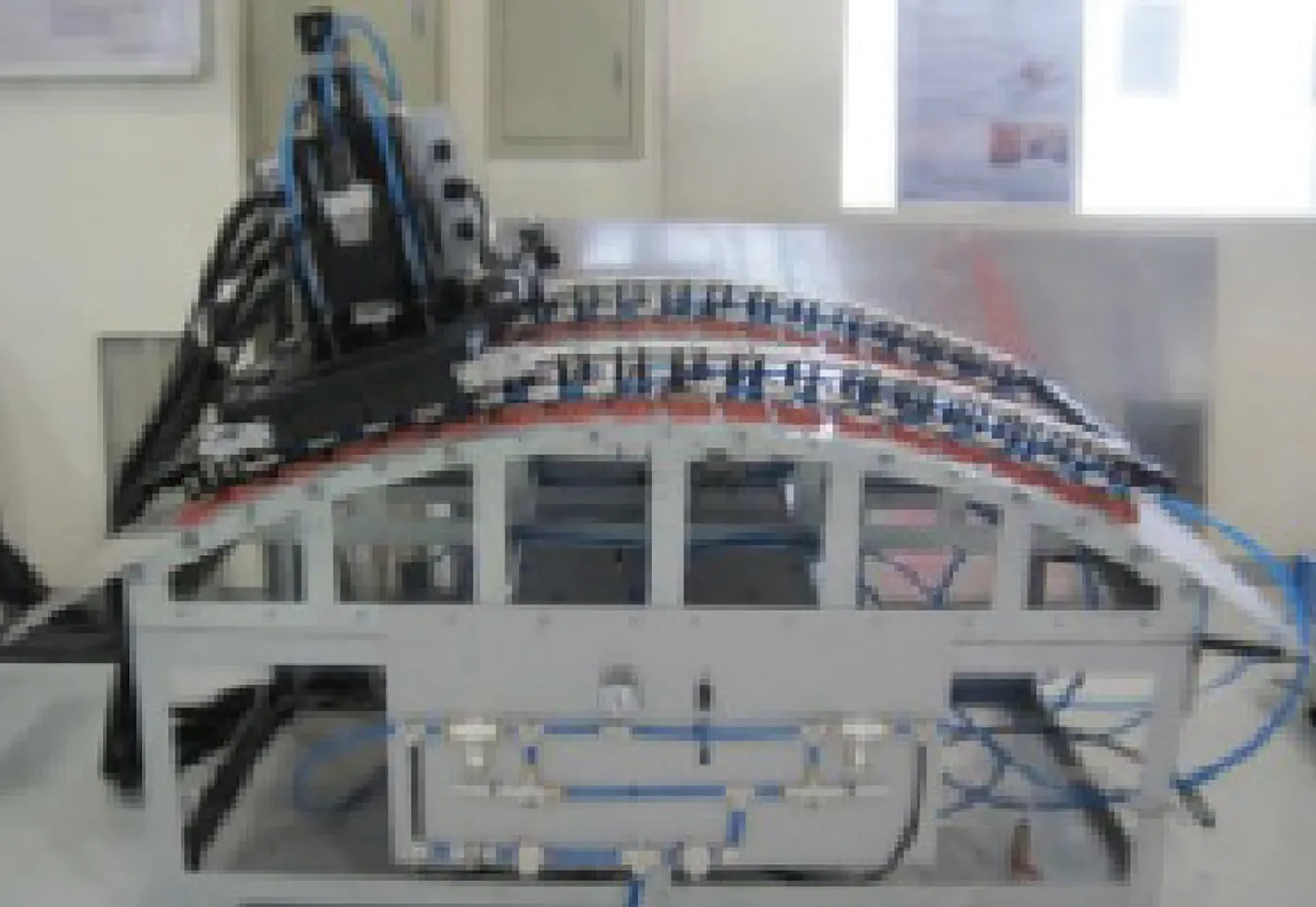
图26 上海交通大学柔性导轨系统[69]Fig.26 Flexible rail system of Shanghai Jiao Tong University[69]
爬行机器人自动制孔系统类似于柔性导轨制孔系统的自动化装配设备。制孔执行器被安装于一台爬行机器人上,这类爬行机器人具有多组真空吸盘,可以吸附并固定于待加工工件表面。爬行机器人自身具有一定的位置寻找和校准的功能,对于小范围的加工速度要快于导轨制孔,在进行局部区域和铺设轨道不方便等的零件表面钻铆作业时,爬行机器人自动制孔系统具有灵活性强、便携度高的优点。法国的Alema Automation公司的爬行机器人约150 kg,其进行爬行和定位制孔依靠多组小吸盘吸于零件表面,如图27 所示。由于爬行机器人经过爬行之后产生的定位误差较大,因此在钻孔之前进行了第二次视觉检测、方向的误差,在离线编程软件中进行误差补偿,计算出待加工孔在当前设备坐标系中的坐标,从而提高制孔的精度。西班牙的M.Torres公司的爬行机器人制孔系统,如图28 所示,采用八个真空吸盘的内外组合方式吸附于飞机表面,移动时交替移动,且移动的时候至少有四个吸盘处于吸附状态,提高了整体的可靠性,同时,其编程系统可以自动获取加工基准和定位到代加工区域进行制孔作业。国内南京航空航天大学廖文和教授团队与中航商飞上海飞机制造有限公司合作研制了一台爬行自动制孔机器人系统,如图29所示,该系统由内外两个框架固定八个真空吸盘吸附行走。控制系统采用的是软数控系统,利用PC平台对系统进行控制,具有结构紧凑、组件简单、稳定性好等特点,且系统响应速度快,计算精度高,便于维护和软硬件升级。
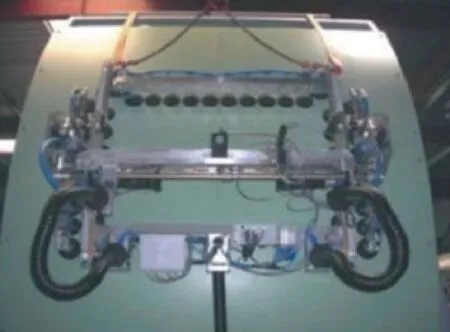
图27 Alema Automation爬行制孔机器人[73]Fig.27 Crawling hole-making robot of Alema Automation[73]

图28 M.Torres爬行机器人系统[74]Fig.28 Crawling robot system of M.Torres[74]

图29 南京航空航天大学爬行机器人系统[75]Fig.29 Crawling robot system of NUAA[75]
相比于国外先进的飞机自动化生产设备,国内大多仍以传统的人工加工为主,设备较为落后,且加工效率不高、精度低,难以满足当下新飞机的加工需求,所以研发具有自主知识产权的高质量自动化装配设备刻不容缓。在自主移动机器人制孔系统方面,国内的研究成果还不具备在大飞机表面环向与航向任意位置稳定吸附行走和精确加工的能力,大多仍处于理论研究和实验室测试阶段,在任意斜面稳定吸附行走技术、基准检测与法向找正技术、模块化集成控制技术等方面还有待深入研究,还有大量的技术瓶颈和工程难题需要被打破与攻克。
5 总结与展望
对国内外关于机器人制孔技术的研究工作进行了总结,主要包括机器人制孔末端执行器设计技术、机器人制孔定位精度控制技术、机器人制孔工艺过程控制技术以及机器人制孔装备研制4个方面。随着航空航天装备的快速发展,大型复杂构件制孔需求逐步增加,机器人钻削技术研究成为了国内外学者关注的焦点。与数控机床相比,机器人加工环境更加复杂多变,尽管机器人制孔装备以及机器人静态定位精度的研究工作取得了很多成果,但对机器人加工过程受动态载荷的加工稳定性及钻削质量控制技术仍有较大的研究空间。针对航空航天领域制孔工艺高精、高质、高效加工需求,提出了未来机器人制孔技术的研究包括以下4个方面:
1) 多能场复合机器人制孔技术研究。多能场(如超声振动、激光等)复合机器人加工工艺在材料去除机理、制孔效率及质量改善等方面具有潜在优势。然而,多能场耦合作用对弱刚度机器人钻削稳定性、材料去除机理、温度场及应力场的影响规律仍需深入研究。同时,多能场引入对机器人钻削大型复杂构件服役性能的影响值得进一步探讨。
2) 大孔径多叠层构件的机器人制孔技术研究。大孔径多叠层构件制孔存在钻削轴向力大、钻削力突变等严重问题,对机器人钻削系统的承载能力及系统静态刚性提出了更高的要求。同时,钻削力的多次突变也对机器人钻削过程稳定性解析提出了巨大挑战。因此,多叠层临界面的动力学表征与稳定域的时变特性是研究大孔径多叠层构件机器人制孔的难点。
3) 大型复杂构件多机器人协同钻削研究。大型复杂构件的加工与装配过程中,采用多机器人协同作业可以进一步提高加工效率。然而多机器人同时对构件开展钻削,必然在加工动力学模型中引入多个动态载荷。因此,多激励源的振动能量场传递模式与机理、多激励源的振动耦合影响机制是多机器人协同钻削研究领域的重点和难点问题。
4) 基于深度学习算法的机器人钻削自适应技术研究。采用人工智能算法开展多元异构数据融合研究,实现钻削颤振的精准识别。同时,基于机器人钻削动力学分析与稳定域范围实现切削参数的智能调节,有效避免持续颤振造成的制孔损伤。该研究方向中多传感器信息感知融合、基于人工智能技术的数据实时处理与反馈等问题必将成为未来研究的热点。
