井架攀爬机器人设计与抗倾覆分析
2022-06-27钟功祥宋华严鹏严陶申伟
钟功祥,宋华,严鹏,2,严陶,申伟
(1.西南石油大学 石油天然气装备教育部重点实验室,成都 610500;2.贵州航天天马机电科技有限公司,贵州遵义 563000
石油是生产生活中不可或缺的能源之一,当下在开采石油中使用最多的井架是K型井架[1],国内学者李向东等[2]对影响井架承载能力的相关缺陷进行了部分统计,统计结果显示:90.48% C级别和100%报废级别的井架出现了不同程度的主立柱(主大腿)损伤情况,这说明了立柱缺陷是影响井架承载能力的最大因素。为了避免在石油开采的过程中发生危险,需要定期对石油井架进行安全检测[3],但是人力对井架进行检测和维修效率低下,且不安全。随着机器人技术发展,现在可以选择利用机器人来对井架进行维修检测。攀爬机器人的种类有很多,但是能在杆状物上攀爬移动的机器人,则必须具有两种功能[4]:贴附与移动,根据两种功能的不同将现有攀爬机器人归纳为以下几类[5]:滚动式攀爬机器人、夹持式攀爬机器人、仿生式攀爬机器人以及吸附式攀爬机器人。其中,李楠等[6]设计了一款多姿态爬杆机器人,该机器人够绕着杆件做旋转运动;王才东等[7]设计出了一种自锁式爬杆机器人,该机器人通过自锁原理克服自身重力,结构较为简单;Fauroux等[8]应用自锁原理设计出一种新型自锁式爬杆机器人Pobot V2;此外,Allan等[9]也利用轮式夹紧的方法研制出来了一款室外电缆自动安装攀爬机器人,该机器人可以在线杆上自主作业。Yoon与Rus[10]研制了Shady3D小型攀爬机器人,由一根中部可旋转的连接杆和两个旋转夹持器组成;Balaguer等[11]同样研制出了一款可以在三维桁架上自由移动的攀爬机器人ROMA,携带相关检测设备对由矩形钢或工字钢构成的桥梁桁架进行巡检。美国密歇根州立大学[12]设计研制了两种不同结构的真空吸附双足小型壁面攀爬机器人;王斌锐等[13]设计出了一种双足机器人,该机器人的吸附装置是3个真空吸盘构成的吸盘组,具有良好的曲面适应能力。针对JJ225/45-K型井架在生产中出现的各种问题,设计了一种可以携带无损检测设备在石油井架上攀爬的机器人结构,并对攀爬机器人进行分析、仿真验证。
1 机器人结构与攀爬步态分析
1.1 机器人结构
以JJ225/45-K型石油井架为攀爬对象,设计出如图1所示的井架攀爬机器人结构,机器人由电推杆、搭载平台、横向移动臂、吸附模块、纵向移动臂、电源主机安装槽、探头安装槽等部件组成。
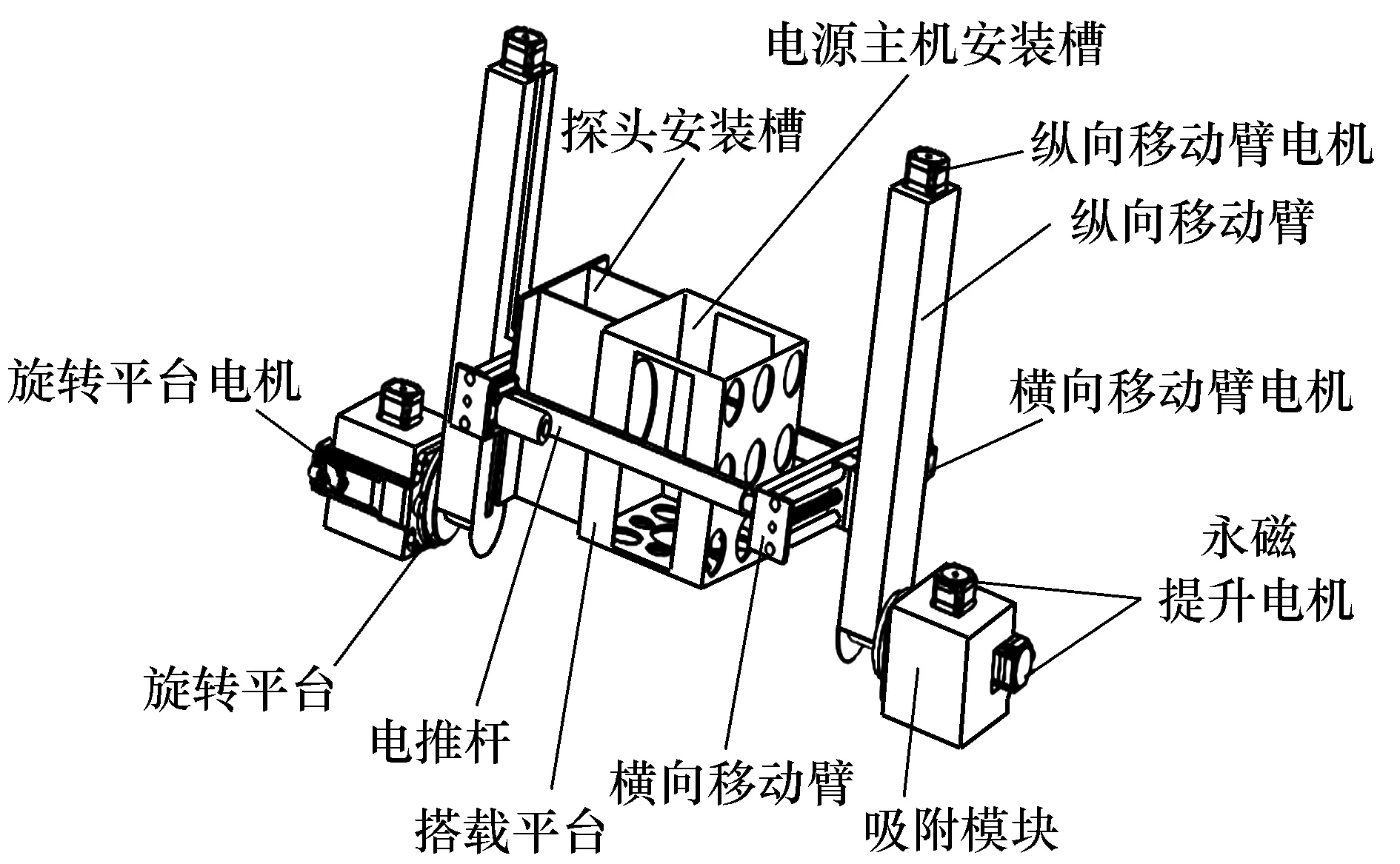
图1 机器人结构示意图
机器人的工作原理为:吸附足上的永磁体通电后吸附在井架上;向前或向后运动时依靠前端或者后端的吸附模块通电、断电配合两侧的电推杆的推动、收缩来完成动作;在越障步态和空间翻转步态时依靠纵向移动臂和横向移动臂上下、左右移动配合吸附模块断电通电完成;搭载平台上携带检测设备以及电源。
1.2 吸附足结构
图2所示为井架攀爬机器人吸附足示意图及其组成部件。吸附足的永磁体材料为NdFeB N35,其总体质量约为8 kg,外壳采用与搭载平台同样的轻质铝合金,为保证永磁体的排列拥有充足的空间,吸附足尺寸定为200 mm×200 mm×200 mm。永磁体形状初选为厚度25 mm、半径为25 mm的圆柱体,材料选用NdFeB35,通过控制步进电机正反转控制永磁吸附盘在外壳内上下移动,进而改变永磁体与壁面之间的间距,以实现吸附力可调,后期可根据永磁吸附力仿真结果再考虑是否对永磁体的尺寸进行调整。

图2 吸附足结构示意图
吸附足上永磁体的排列方式采用环形布置,如图3所示。相邻永磁体的中心间距为140 mm,使得永磁体的形心位于同一个圆上,结构比较紧凑且抗倾覆性能力优于直线布置与矩形布置[14]。
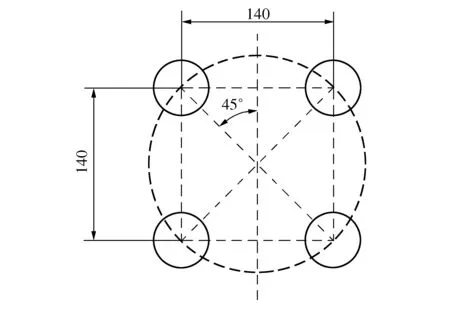
图3 吸附足永磁排列方式
1.3 机器人攀爬步态分析
井架攀爬机器人有3种步态:常规步态、越障步态、空间翻转步态。常规步态在工作时重心低,攀爬过程平稳,所以只需要对越障和空间翻转步态进行分析。
1) 越障步态
越障步态的整个过程如图4中所示,具体动作为:当攀爬机器人前端遇到如图4a)所示障碍时,前后端纵向移动臂将搭载平台提升至图4b)所示的位置;接着前方吸附磁体断电,前纵向移动臂提升至图4c)状态;下一步电推杆伸长,将搭载平台和前移动臂举升至图4d)位置;然后前移动臂下降至图4e)所示的吸附磁体接触井架腿,接着前吸附磁体通电吸附在井架腿上;后端吸附磁体断电,横向移动臂收缩,带动后端纵向移动臂前移,完成如图4f)所示动作;继而后端纵向移动臂提升,电推杆收缩至初始位置,前后端纵向移动臂下降至初始位置,完成图4g)、图4h)、图4i)的动作,如此便完成了越过井架腿上障碍的攀爬。

图4 越障步态示意图
2) 空间翻转步态
空间翻转步态的整个过程如图5所示,当机器人攀爬至横撑杆与主弦杆相交处,攀爬机器人不能再直线攀爬,这时需要空间翻转换面攀爬。具体的动作为:空间翻转初始状态为图5a)所示,下一步搭载平台在前后端纵向移动臂的作用下举升至图5b)所示的位置;然后搭载平台在旋转平台电机作用下向需要转向的方向旋转90度,动作如图5c)所示;然后搭载平台沿着横向移动臂下移,如图5d)所示;接着前端吸附磁体断电,前端纵向移动臂回到初始状态,如图5e)所示;继而前端吸附磁体通电,将前端纵向移动臂固定在井架腿上,后端的吸附磁体断电,后端纵向移动臂回到初始状态,后端吸附磁体通电,吸附在井架腿上,便完成了图5f)、图5g)、图5h)所示的动作,如此就完成了空间翻转的动作。

图5 空间翻转步态示意图
2 抗倾覆力学分析
2.1 越障步态分析
对于越障态而言,发生倾覆的最大可能在于图4b)~图4f)的过程,可将后足受力简化为图6。图6中重力参数如表1所示,尺寸参数如表2所示。此种情况若发生倾覆,后足上排永磁体必先被掀起。

图6 越障步态的力矩分析简图

表1 重力参数表

表2 尺寸参数表 mm
若不发生倾覆,则需
∑MZ=0
(1)
根据图6所示可以表达为

(2)
式中:L1为后吸附足模块高度,mm;L2为后纵向移动臂重心到攀爬面的距离,mm;L3为搭载平台与搭载物体的重心到攀爬面的距离,mm;L4为上部分重心到吸附足上端线的距离,mm;L5为吸附足中上排永磁体吸附中心到吸附足模块最底端的距离,mm;α为攀爬面与地面角度。G1为后吸附足重力,N;G2为后纵向移动臂重力,N;G为搭载平台与搭载物体重力和前吸附足重力、前纵向移动臂重力总和,N。
2.2 空间翻转步态分析
对于空间翻转步态而言,发生倾覆的最大可能发生在图5e)~图5h)的过程,若出现倾覆现象,攀爬机器人将绕吸附足中左侧某一永磁体发生旋转,因为排列特殊性,无论上下,其平衡式相同,以左侧上永磁体中心为原点坐标建立坐标系,受力情况如图7所示。图7中重力参数如表1所示,尺寸参数如表2所示。
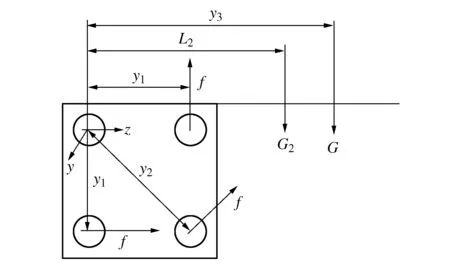
图7 空间翻转步态的力矩分析简图
若使机器整体不绕坐标轴y发生旋转,则有
∑My=0
(3)
根据图7所示表示为
f(2y1+y2)-G2L2-Gy3=0
(4)
式中:y1为永磁体中心距,mm;y2为对角两个永磁中心距离,mm;y3为搭载平台与搭载物体的重心到原点O的距离,mm。
3 永磁磁力仿真分析
JJ225/45-K型井架主腿的材料为Q345,它的B-H特性曲线如图8所示[15],同时吸附足的永磁体材料性能参数[16]如表3所示。利用Ansoft Maxwell分析攀爬机器人攀爬足上的永磁体与JJ225/45-K型井架材料的磁体吸附特性。

图8 Q345的B-H特性曲线

表3 NdFeB N35性能参数
在Maxwell中建立了尺寸为5 mm的Q345薄板和相应尺寸的NdFeB N35永磁体模型,在直接接触的情况下,得到如图9所示的结果,可见5 mm的模型可以产生734.25 N的吸附力,这时攀爬机器人足以被吸附在井架之上。但是考虑到永磁体为了避免磨损,需要包裹一层薄橡胶在永磁体外表,这样则需要验证永磁体吸附力和井架腿所隔距离的关系,将求解所得结果进行拟合得到吸附力和所隔距离的关系如图9所示,可见当永磁体与井架腿距离为1 mm时,5 mm的Q345薄板和相应尺寸的NdFeB N35吸附力下降到了约520 N,吸附力将会不足以抵抗攀爬机器人发生倾覆,需要对吸附足进行调整。因为橡胶和空气的磁导率都接近1[17],则吸附足和井架腿之间的距离不变时,意味着只需要修改永磁体尺寸来满足吸附力需求。
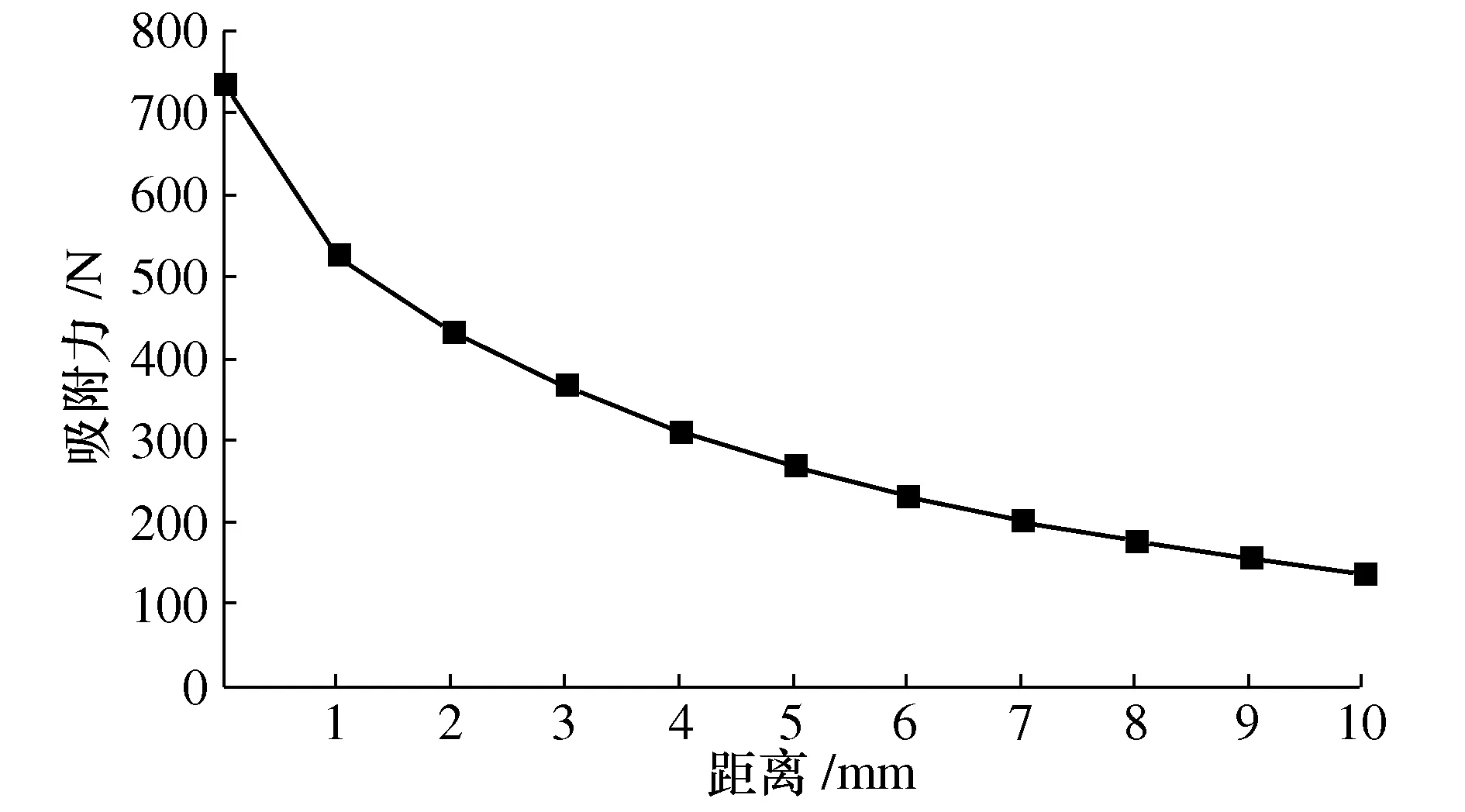
图9 吸附力和距离的关系
为了增加吸附足和井架腿之间的吸附力,有两种方案:一是增加永磁体的半径,以达到增加底面积的效果;二是加大永磁体的厚度。为了找到半径和厚度的最佳值的尺寸,选取尺寸为25 mm×25 mm、25 mm×30 mm、30 mm×25 mm、30 mm×30 mm这4组尺寸组合,并且利用Maxwell求解4组尺寸和间隔距离的关系,得到结果如图10所示:选择厚度为25 mm、半径为30 mm的永磁体可以满足井架攀爬机器人的使用要求。确定永磁体尺寸后进一步验证永磁体排列后是否对其吸附力产生影响,仍在Maxwell中建立仿真模型,得到吸附力与间隙大小关系如图11所示,可见吸附足最大能够产生3 400 N的吸附力,小于单一永磁体仿真所求得的吸附力的4倍,距离井架1 mm时也能产生2 700 N左右的吸附力,当吸附距离提升至4 cm时,吸附力已经趋近域0,因此可以认为最终所选用的永磁体尺寸和排列方式满足使用要求。

图10 不同永磁体尺寸下吸附力与距离的关系
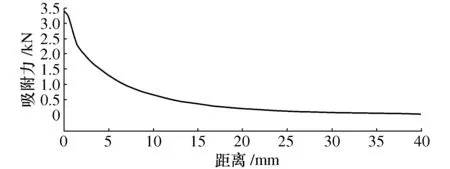
图11 调整尺寸后吸附力与距离关系
4 Adams虚拟样机抗倾覆分析
4.1 攀爬机器人模型建立
利用SolidWorks软件建模后导入Adams后的攀爬机器人模型会出现难以被捕捉到所需的坐标点或是捕捉始终存在偏差,并且转换得到的模型不能参与参数化计算,构件的几何尺寸不能在 Adams中修改。考虑到上述问题,决定直接在Adams软件中建立虚拟样机简化等效模型,然后将模型的各个部件之间添加运动副和质量等约束条件,如图12所示。

图12 机器人模型及运动副示意图
4.2 越障步态抗倾覆分析
对于越障步态而言,在实际情况中,井架与地面不都是垂直的,夹角范围多在85°~90°之间。在井架与地面垂直时,攀爬机器人重力全部表现为垂直分量,没有垂直于攀爬面的重力分量来削减正压力,因此摩擦力能够保持足够大。当井架与地面不垂直时,机器人会受到垂直于攀爬面方向的重力分量来削减正压力,以至于使摩擦力减小。为使攀爬机器人具有最大的适应性,需要找到更大滑移风险的攀爬环境,这里对模型进行了轻微调整,使攀爬面与地面成85°。
在虚拟样机试验仿真过程中发现,当攀爬机器人运动到9s左右时,已经开始出现倾覆现象,到10 s左右时已经完全倾覆,图13与图14分別给出了攀爬机器人9 s和10 s时瞬时姿态。

图13 9 s时攀爬机器人倾覆瞬时姿态
图15与图16分別给出了前10 s内攀爬机器人后足与攀爬面之间接触力和夹角变化的曲线。如图15所示,后足与攀爬面之间的接触力到8 s左右时降为0,说明此时攀爬机器人已经出现了倾覆趋势。如图16所示,在8.5 s之前,后足与攀爬面之间的夹角为0,此阶段后足与攀爬面贴合,未出现倾覆,8.5 s之后,后足与攀爬面开始出现夹角,并在短时间内迅速增加,直至10 s完全倾覆。

图15 前10 s内接触力变化曲线
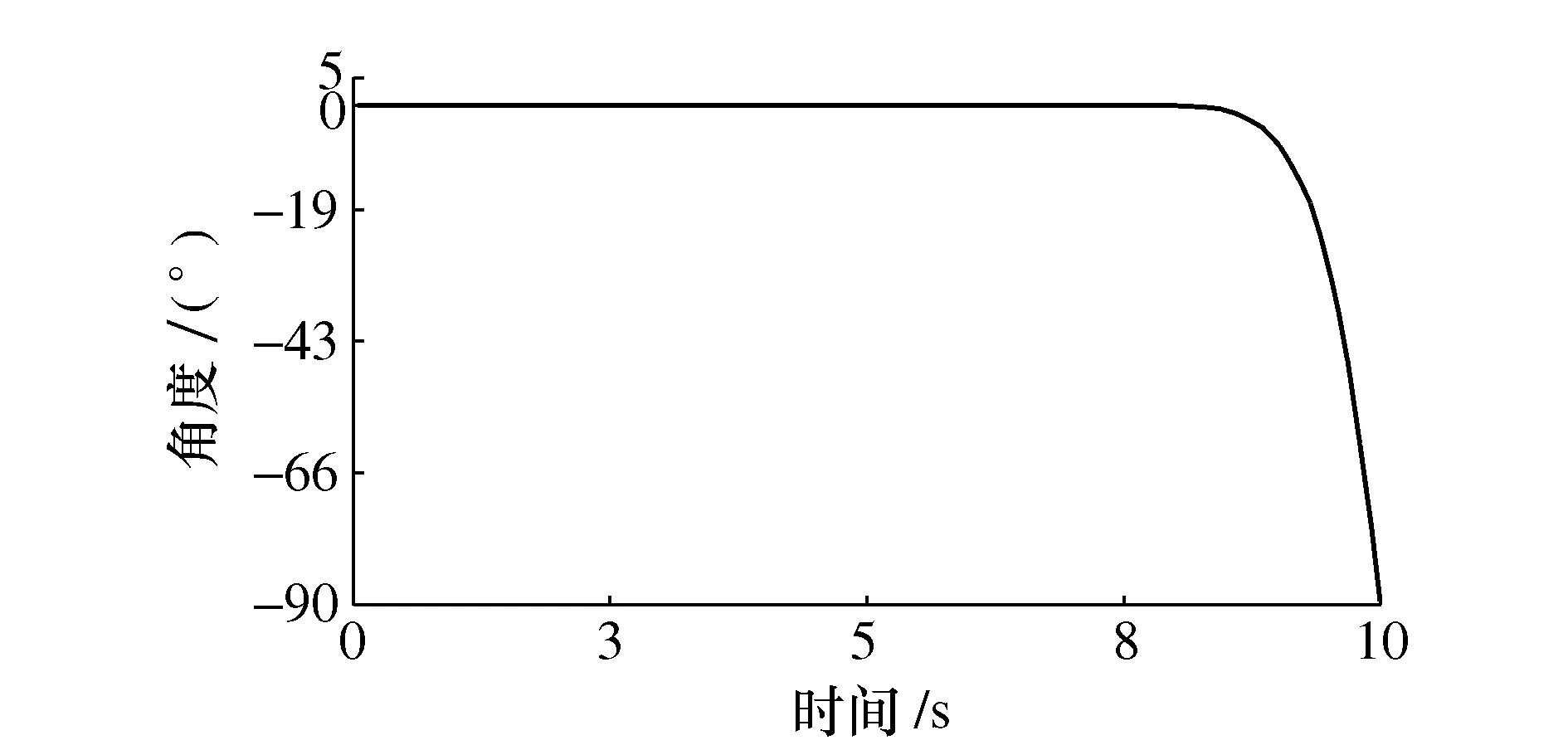
图16 前10 s内夹角变化曲线
560 N的吸附力是静力学平衡状态下单个永磁体提供吸附力的理论值,显然与仿真结果存在一定偏差,而在磁场仿真中求得吸附足所能产生的吸附力远大于该值。为找到在此攀爬情况下,需要多大的吸附力才能抵抗攀爬机器人发生倾覆,采用不断增加吸附力的方式进行仿真,发现当吸附力调整到610 N时,攀爬机器人没有发生倾覆。
图17与图18分别给出了攀爬机器人整个越障过程后足与攀爬面接触力以及夹角的变化情况。如图17所示,在10 ~20 s之间后吸附足与攀爬面之间的接触力处于低谷状态,此阶段接触力趋近于0,即最容易发生倾覆,该阶段处于前足抬腿至最高时期,因此产生的倾覆力矩也最大,后5 s内,前足开始下放,接触力也逐渐增加。由图18可以看出,整个过程中后吸附足与壁面之间的夹角始终在0~0.1°之间波动,此范围属于合理的误差范围,因此可以认为后足在此越障过程中始终与攀爬面贴合。综上所述,虽然在静力平衡计算中所求的结果与仿真结果存在一定偏差,每个永磁体需要提供至少610 N吸附力才能防止攀爬机器人在越障过程中发生倾覆,但是根据磁力仿真结果,每个永磁体所能提供的吸附力是大于610 N的,因此可以认为攀爬机器人在实际攀爬越障过程中是不会发生倾覆的。
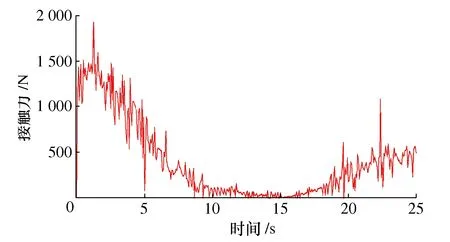
图17 整个越障过程接触力变化曲线
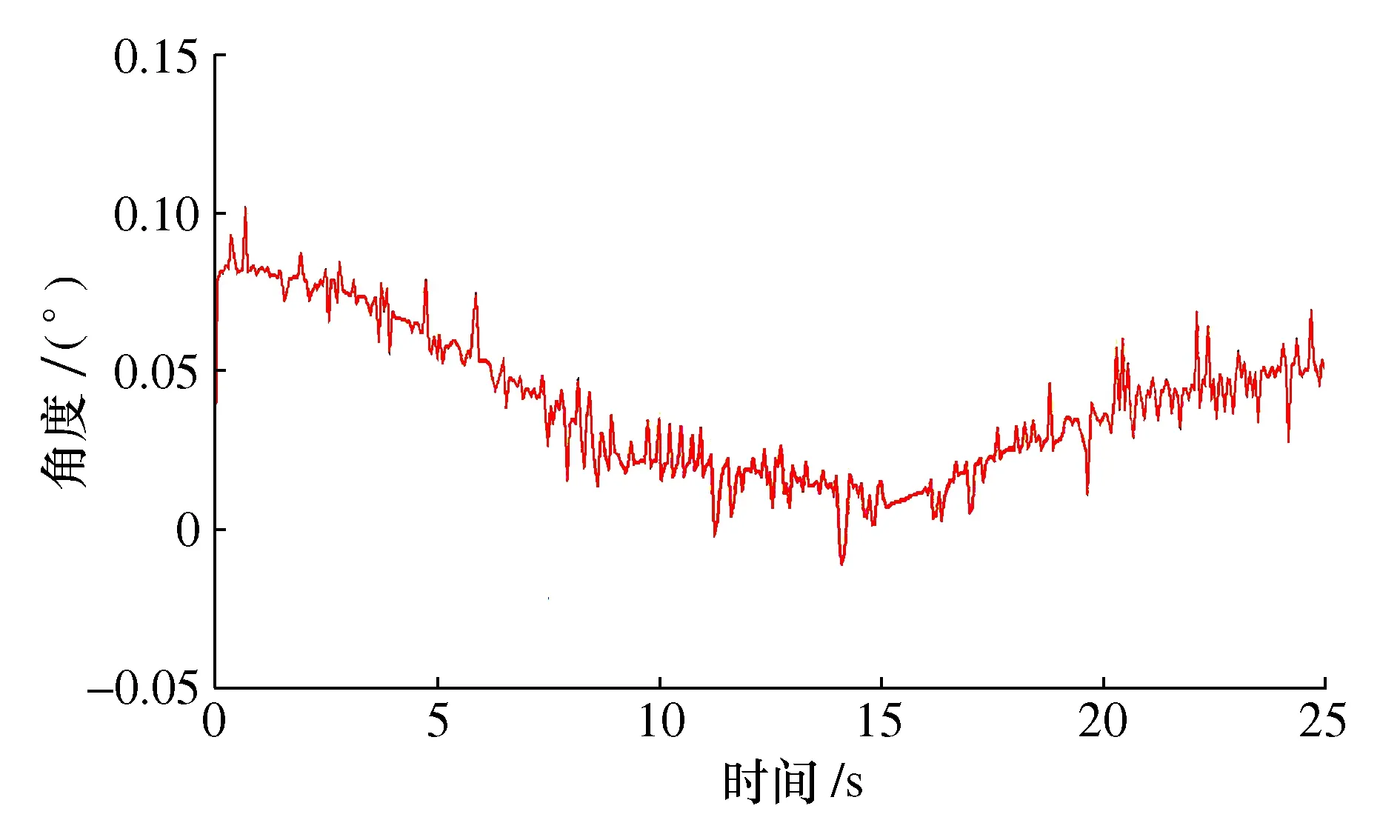
图18 整个越障过程夹角变化曲线
4.3 空间翻转步态抗倾覆分析
对空间翻转步态而言,其危险状态在于纵向移动臂摆动完成后前吸附足进行攀爬面更换吸附的过程,在此过程中,后足单独吸附于攀爬面,此时整个攀爬机器人有出现滑移和倾覆的风险。不同于越障步态的倾覆,其倾覆特征在于绕吸附足的某一点旋转且同时也可能伴随着滑移,如图19所示。
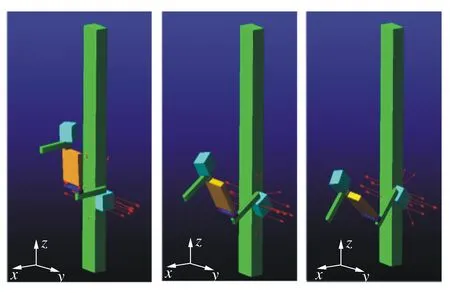
图19 空间换面倾覆示意图
此时整个攀爬机器人将由摩擦力来抵抗倾覆,因此并不能推测出哪一种攀爬环境更容易发生倾覆与滑移,需要在攀爬面与地面90°以及85°夹角两种情况下进行分析。图20给出了攀爬机器人在不同时刻的运动状态。图21与图22分别为攀爬面与地面90°、攀爬面与地面85°的分析结果。
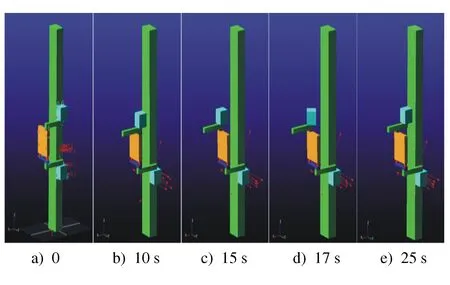
图20 运动状态图
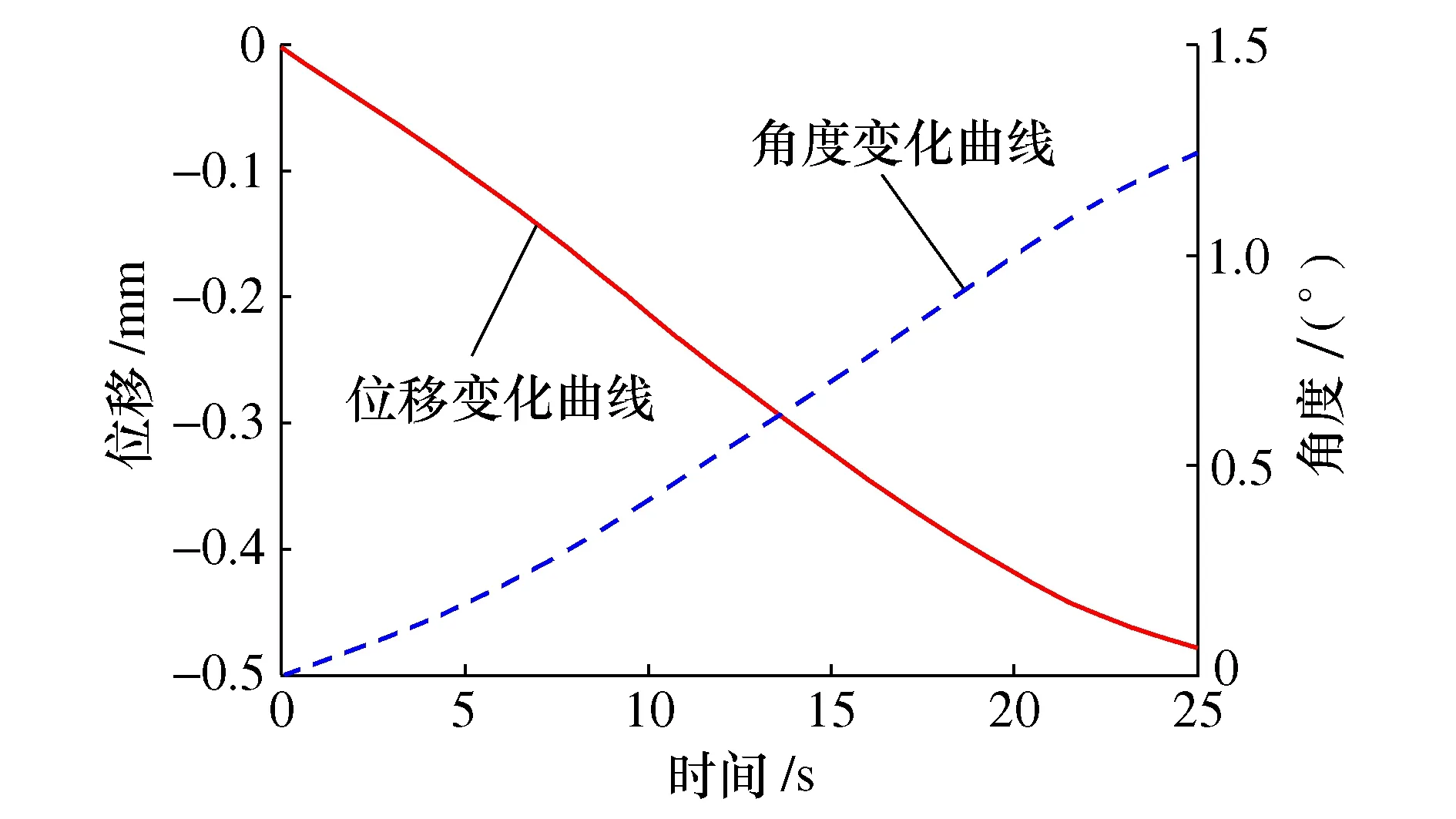
图21 90°情况分析结果
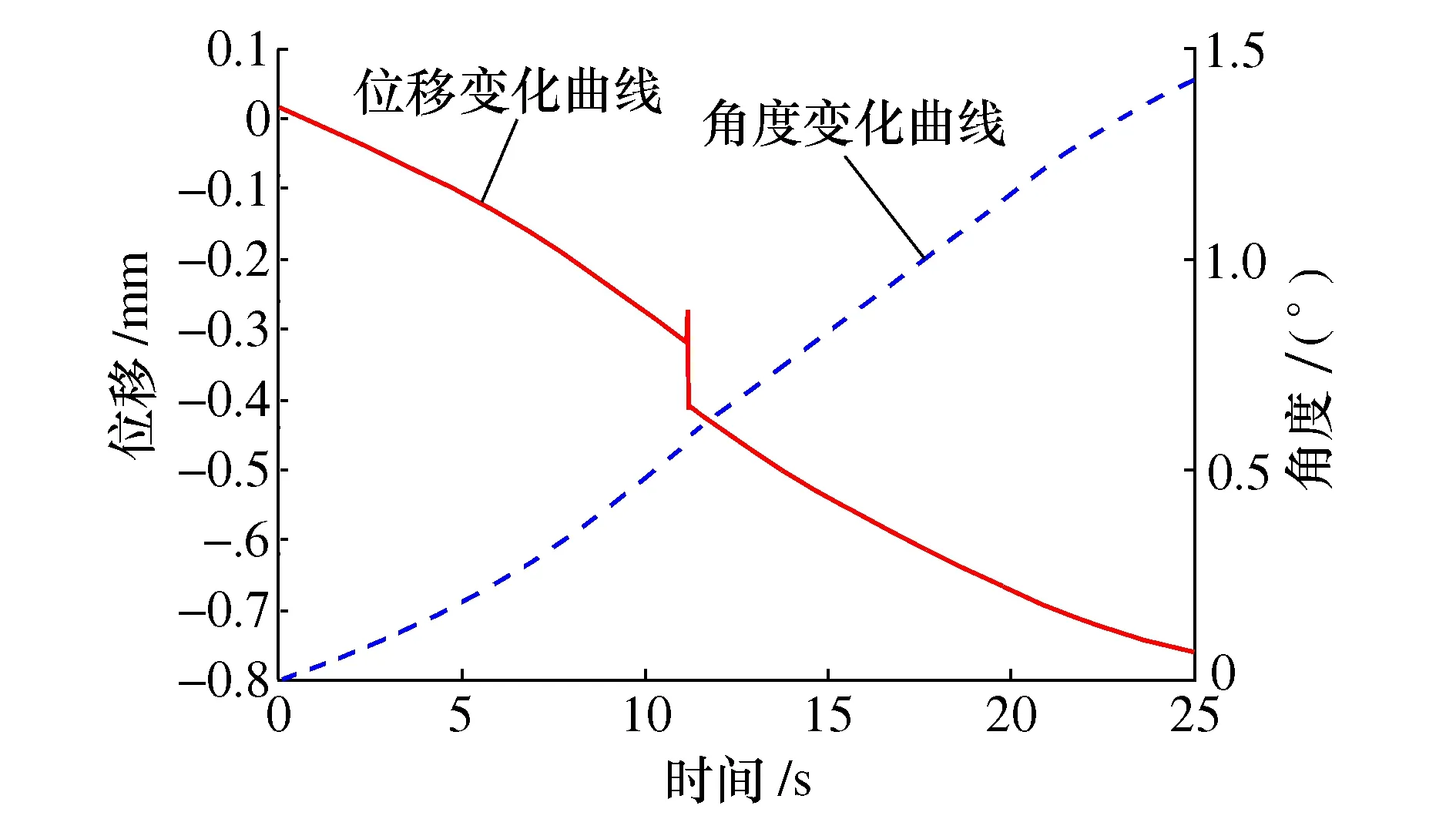
图22 85°情况分析结果
由图21可知,当攀爬面与地面成90°时,整个过程中后足产生的角度偏移量不超过1.25°,因此可认为整个换面过程不会发生倾覆;且整个过程中攀爬机器人的滑移量不超过0.5 mm,在22.5 s滑移曲线接近一条直线,22.5 s过后曲线切线斜率有所减小。总体来说,在560 N理论作用力计算值下,在攀爬面与地面成90°的情况下,整个空间翻转过程是相对安全的。
由图22可知,当攀爬面与地面成85°时,后足角度偏移量有所增加但总体偏移量不超1.5°;相对于攀爬面垂直于地面而言,后足的滑移量增加了约0.25 mm,但总体滑移量不超过0.75 mm,在11 s左右时,后足出现了急剧下滑,但其滑移量为0.1 mm。总体来说,两者变化量是很小的,因此可以认为攀爬机器人在攀爬面与地面成85°情况下,其空间翻转步态是相对安全的。进一步增大吸附力至650 N,其结果如图23所示,显然增大吸附力后,后足产生的滑移与偏转有所改善,在11 s时不再出现急剧下滑的趋势,且总体滑移量降到了0.45 mm,偏转角度也降到了0.95°。
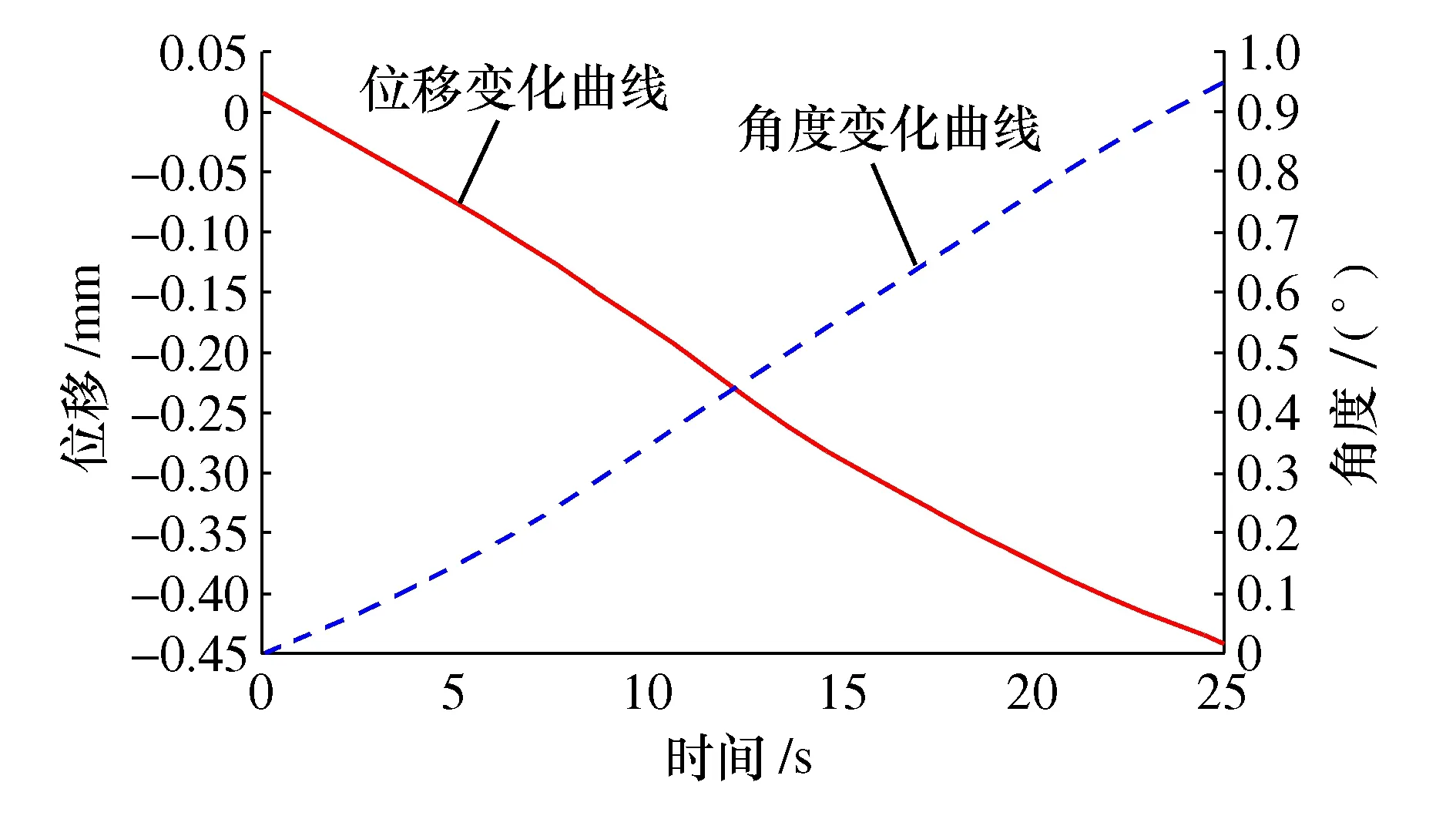
图23 85°情况下增加吸附力后分析结果
虽然空间翻转步态在攀爬面与地面成85°情况下出现滑移与倾覆的可能性更大,但经过仿真验证,在单个永磁体提供560 N理论吸附力作用下还是相对安全的,另一方面,单个永磁所能产生的吸附力远大于该值,因此所设计的攀爬机器人能够在井架攀爬过程中顺利的实现空间翻转步态。
5 结论
1) 为了满足JJ225/45-K型井架检测维修需求,提出了一种新型的吸附式井架攀爬机器人,由永磁体将攀爬机器人吸附在井架上,电推杆伸缩驱动攀爬机器人运动,配合纵向和横向移动臂完成越障和空间翻转运动,可以使攀爬机器人实现携带检测维修工具在井架上完成检测作业。
2) 通过分析井架攀爬机器人的步态发现攀爬机器人在越障步态和空间翻转步态这两种情况易发生倾覆。对机器人容易发生倾覆的两种情况进行力学分析,并且运用Ansoft Maxwell软件对吸附足上的永磁体与井架进行了磁场分析,发现初选初单个尺寸为厚度25 mm,半径25 mm的永磁体尺寸不足于抵抗倾覆的发生,经仿真分析后调整了永磁体尺寸,选用半径30 mm,厚度25 mm的永磁体,且经过验证可以满足使用条件。
3) 运用Adams软件对攀爬机器人越障攀爬和空间翻转两种攀爬步态在攀爬面与地面成85°和90°时进行仿真分析,发现调整永磁体尺寸后的攀爬机器人可以安全的完成两种步态下的攀爬。
