磁控胶囊机器人运行平稳的参数优化设计
2022-06-27胡冠昱梁亮刘煜
胡冠昱,梁亮,刘煜
(长沙学院 机电工程学院,长沙 410022)
胶囊内镜(即胶囊机器人)是一种能无创进入人体肠道内进行医学检查和治疗的智能化微型工具[1]。胶囊机器人按结构可分为光滑胶囊机器人[2]、螺旋胶囊机器人[3-4]和腿式胶囊机器人[5]等。其中,光滑结构是临床实际应用中的一种常用结构。由于采用电池、电线存在诸多问题,而磁场具有各种优势,因此胶囊机器人的驱动方式主要采用外磁场驱动。现有的外磁场驱动方法主要分为两类:线圈法和永磁体法。线圈法是指利用多组线圈产生空间磁场来驱动胶囊机器人运动[6-7]。永磁体法是指利用外部永磁体的运动来驱动内部含磁铁的胶囊机器人作相应运动[8-9]。线圈法采用的设备相对复杂、成本高、操作繁琐。永磁体法控制原理简单、操作方便、易于商业化,但它的难点在于控制外部永磁体实现对胶囊机器人作用力的平衡。
影响胶囊机器人运行性能的参数大致可以分为几类:与工作管道相关的参数,如管道直径、管道形状、管道表面形貌与管道特性等;与管内流体相关的参数,如粘液粘度、粘液密度、粘液相数、粘液特性等;与机器人相关的参数,如机器人平移速度、机器人转速、机器人结构参数等。学者们采用各种方法对上述各类参数进行了大量的理论和实验研究。叶波等采用一种方形永磁体驱动外螺旋磁性胶囊机器人作平移和旋转运动,并实验研究了不同永磁体和胶囊机器人间距下不同转速时的平移速度大小[10]。Guo等应用赫兹接触理论、有限元方法和实验手段研究了胶囊机器人在不同平移速度下对管道壁的压力[11]。Zhou等采用CFD(Computational fluid dynamics)方法稳态计算了不同螺纹形状、线数和导程下的外螺旋胶囊机器人的推进速度和阻力矩[12]。Wang等应用ANSYS-CFX软件数值计算和实验测量了不同螺纹结构参数下的外螺旋机器人运行时管道出口流体速度[13]。Liang等采用有限体积法稳态计算了固液两相流和液液两相流环境下,螺旋胶囊机器人的运行特性[14]。
综上所述,目前对于胶囊机器人的管内运行性能,理论研究包括胶囊机器人与肠道的接触力学和润滑理论,数值研究主要是CFD方法中的有限元法和有限体积法的稳态计算,实验研究集中于胶囊机器人的螺纹结构参数、平移速度、管道壁压力等;暂未研究非稳态下胶囊机器人旋转和平移(旋进)时管内流体流场的计算和测量,也未讨论各类参数对胶囊机器人运行性能影响的权重。
本文设计制造一种永磁体法驱动的胶囊机器人系统,利用PIV(Particle image velocimetry)技术实验验证所采用的CFD数值计算方法的正确性,并针对管道直径、机器人平移速度、机器人转速和流体动力粘度等四个典型参数,以胶囊机器人平稳运行时的性能指标(机器人周围流体湍流强度)为优化目标,选用均匀设计数值模拟方法,分析4个参数对胶囊机器人运行平稳度的影响权重,并设计出4个参数的最优组合。
1 胶囊机器人结构和相关参数
根据永磁体驱动法,采用外部永磁体驱动内含磁铁的胶囊机器人在管道内运动,如图1所示。外部永磁体为圆柱环,内部磁铁为实心圆柱,放置在胶囊机器人中心,两者相隔合适距离,磁极方向均为径向,且各自一半为N极,一半为S极,两者异极相对。

图1 胶囊机器人结构和相关参数示意图
初始时,外部永磁体位于胶囊机器人y轴正上方,胶囊机器人受到外磁体的磁吸力,贴靠管道上壁,此时,胶囊机器人受到重力、粘液浮力、磁力和管道壁压力,处于平衡状态。控制外部永磁体沿着x轴方向作旋进运动,由于其对胶囊机器人内部磁铁的磁力,驱动胶囊机器人跟随其沿着x轴作相同的但略微滞后的旋进运动,此时,胶囊机器人x方向受到的作用力包括磁力x分量、粘液阻力和与管道壁摩擦力。影响胶囊机器人运行性能的几个主要参数包括管道直径d、机器人平移速度v、转速n,和粘液动力粘度η。
2 数值计算模型与方法
2.1 数值计算数学模型
CFD,即计算流体动力学,它是将流体力学的控制方程中积分、微分项近似地表示为离散的代数形式,使其成为代数方程组,然后通过计算机求解这些离散的代数方程组,获得离散的时间/空间点上的数值解。
当胶囊机器人在充满流体的管道内运行时,假设管道内流体不受温度影响,且不可压缩,管道内流体满足质量守恒方程和动量守恒方程[15],即

(1)
h=x,y,z
(2)
式中:ρ为流体密度;=i+j+k,i、j、k分别为x、y、z轴的单位矢量;ux、uy、uz为流体速度矢量u在x、y、z方向的分量;p为流体压力;τxx、τxy、τxz、τyx、τyy、τyz、τzx、τzy、τzz为因分子粘性作用而产生的粘性应力τ的分量;Fx、Fy、Fz为体积力,若体积力只有重力,且沿y轴竖直向下,则Fx=0,Fy=-ρg,Fz=0。
式(1)和式(2)为粘性流体流场数值计算的数学模型。采用CFD方法计算管内流体流场,即可获得流体对机器人作用力,求解过程为:系统几何建模,网格划分,边界条件和参数设置,数值求解。
2.2 流体湍流强度
当胶囊机器人在充满流体的管道内运行时,流体的流动为湍流。这时,流体的压力和速度随时间变化而变化,脉动性较强。湍流强度是衡量湍流强弱的相对指标,定义为流体脉动速度均方根与平均速度的比值。机器人周围流体的湍流强度越大,流体压力和速度变化更强,流体相对运动更紊乱,机器人运行平稳度越差。

(3)

2.3 系统建模
如图2所示,数值计算几何模型包括胶囊机器人、圆管和流体。机器人外径为10 mm,长度为18 mm,两端为半球状,中间为圆柱。参考人体小肠直径,圆管直径设为 18 mm,长度为 300 mm。管内流体选用二甲基硅油,接近于胶囊内镜检查时的肠道液。这是因为在检查小肠前,需要服用二甲硅油散和纯净水,类似于二甲基硅油,能够有效去除小肠内的气泡,起到理想的清洁效果[16]。
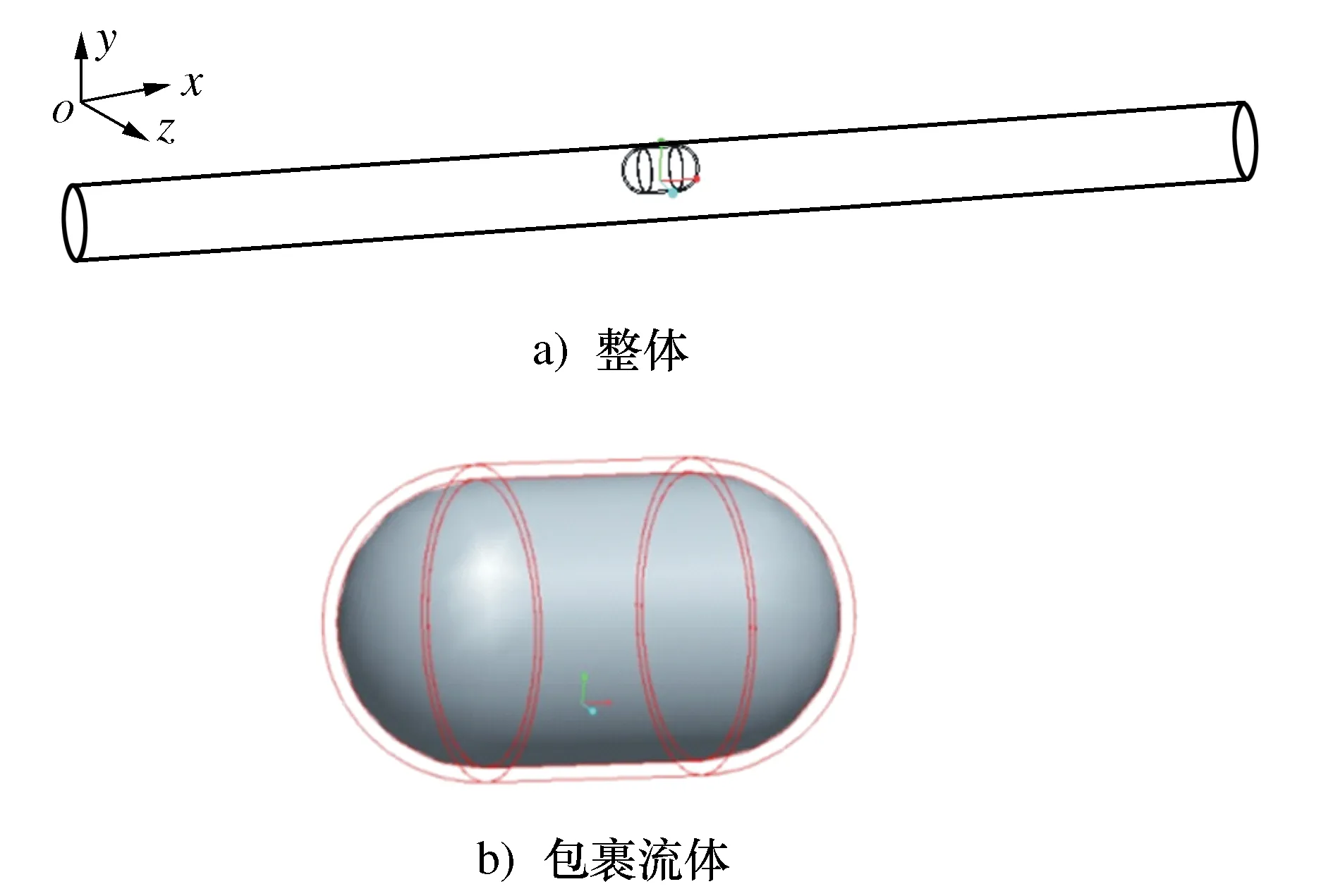
图2 胶囊机器人系统几何模型
考虑到胶囊机器人作平移和旋转运动,因此在其表面设计一层包裹流体,它的形状和胶囊机器人外形相同,厚度为0.5 mm。因为数值计算需要,包裹流体与圆管上壁面相距 0.5 mm。
2.4 流体湍流强度
管道内流体包括两个流体区域:胶囊机器人外表面包裹流体和管道内剩余流体。两个流体区域均选用四面体网格,包裹流体区域采用加密网格。在网格质量满足计算要求条件下,不断增大网格数目,减小时间步长,直到数值计算结果趋向稳定时,确定网格数和时间步长。最终,确定包裹流体区域网格间隔尺寸为0.5,网格数为17 300;剩余流体区域网格间隔尺寸为1.3,网格数为234 464;时间步长为0.000 5 s。划分后的机器人系统网格如图3所示。

图3 胶囊机器人系统网格图
2.5 计算模型选择和参数设置
计算中,湍流模型采用标准k-ε模型,近壁处流动采用标准壁面函数处理。根据实际应用情况,胶囊机器人平移速度v变化范围为0.02~0.06 m/s,胶囊机器人转速n变化范围为60~180 r/min。管道直径d变化范围为14~22 mm,流体动力粘度η变化范围为0.005~0.1 Pa·s。流体流场压力和速度耦合方程的求解采用标准的SIMPLE算法,压力、动量、湍动能和耗散率的差分格式均为一阶迎风格式。考虑到胶囊机器人在管道内作旋转和平移运动,计算采用滑移网格方法和动网格技术分别模拟相应运动,并假定机器人沿着x轴作旋进运动。
根据肠道特点,管道两端均设置为壁面,且不考虑管内流体流动。初始条件设置全部区域初始值为零,解算收敛精度设置连续性,x、y、z方向速度,k,ε均为0.001。
3 实验验证
为了验证所采用的CFD数值计算方法的正确性,应用PIV技术测量管内流体流场,如图4所示,计算机和同步器控制CCD(Charge-coupled device)相机拍照和激光发生器产生脉冲激光同步,脉冲激光厚度为1 mm,其作用是照亮管内流体的待测区域(即胶囊机器人运行时的xoy平面)以方便CCD相机连续拍摄此平面内示踪粒子图像,经数据处理,从而获得示踪粒子处流体的速度场,即得到胶囊机器人运行时周围流体xoy平面的流场。

图4 胶囊机器人管内流体流场PIV测量原理图
根据图4所示工作原理,设计制造了一台磁控胶囊机器人管内流体流场测量实验台。如图5所示,该实验台由驱动部分和测量部分组成。驱动部分包括多轴运动平台、外部永磁体、胶囊机器人、试验管道、旋转电机、运动控制卡、上位机等。测量部分包括PIV系统、支架、玻璃水槽、压块、垫片等。其中,PIV系统主要部件有:脉冲激光器、片光源、CCD相机、同步器、高速图像数据接口板、图像分析系统、计算机等。
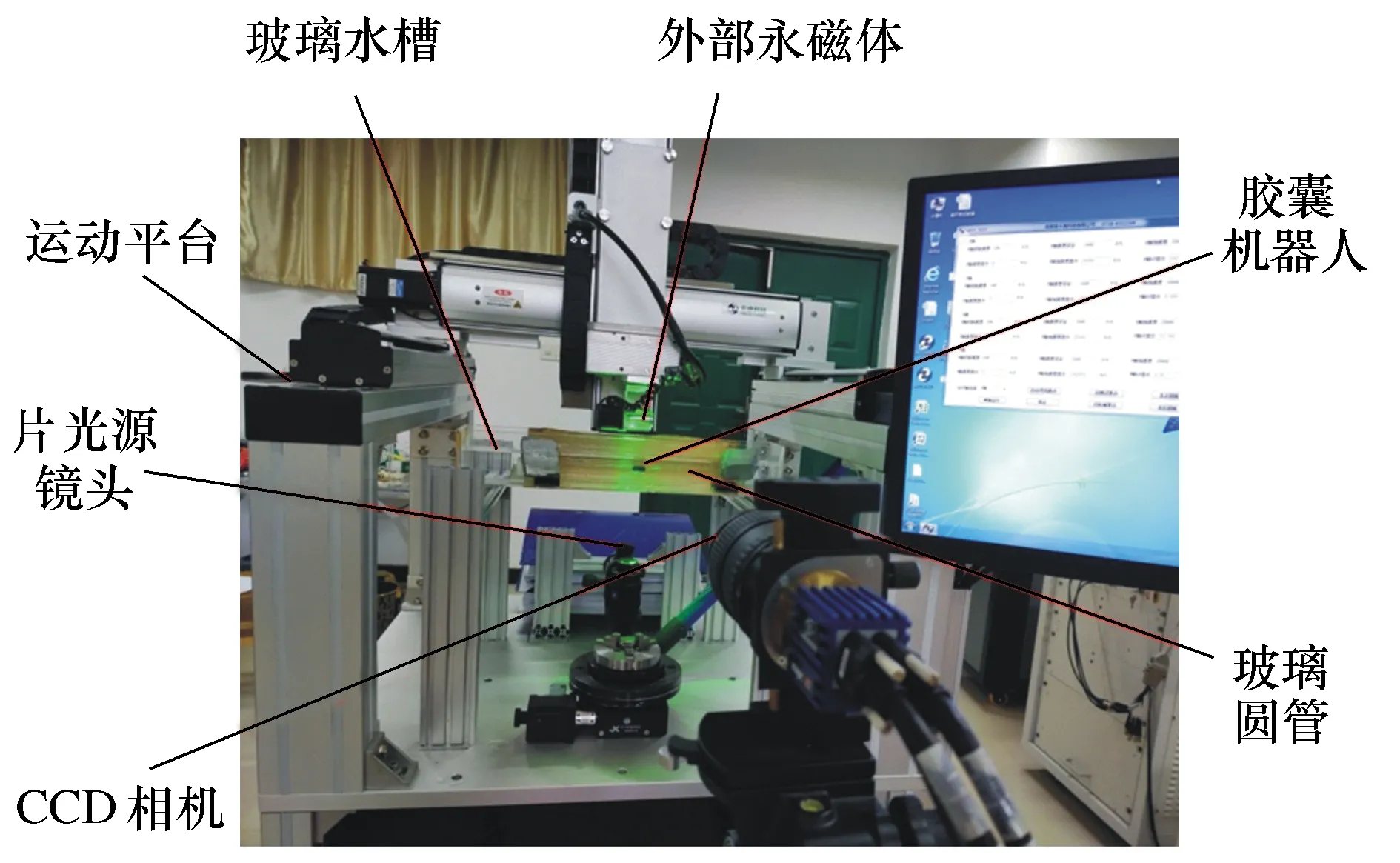
图5 管内流体流场测量实验台
图6是外部永磁体和胶囊机器人,外部永磁体为圆环状,外径28 mm,内径12 mm,长度30 mm。
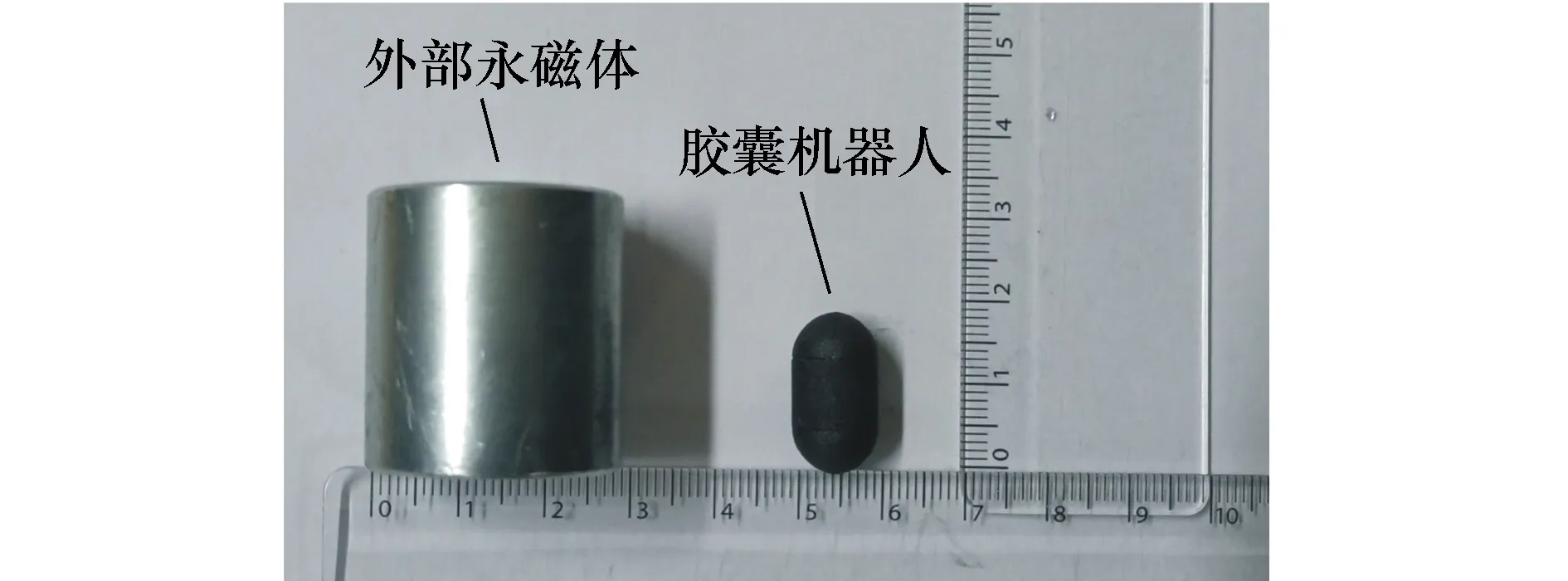
图6 外部永磁体和胶囊机器人
如图7所示,胶囊机器人内置磁铁,磁铁为圆柱状,直径6 mm,长度5 mm。为了测量需要,胶囊机器人外壳选用黑色。外部永磁体和内置磁铁材料牌号均为N38钕铁硼。为了保证胶囊机器人在不同管径的管道中正常运行,外部永磁体中心轴与胶囊机器人中心轴间距l固定为51 mm。

图7 胶囊机器人零部件
为了比较数值模拟结果和实验测量结果,如图8所示,以胶囊机器人中心竖直向下对应的管道底部位置为坐标原点,建立直角坐标系,水平向右为x轴正方向,竖直向上为y正方向。图9是以图8所示坐标系中胶囊机器人下方区域流体绕z轴涡量[17]的CFD数值计算和5次重复PIV实验测量结果的对比图。
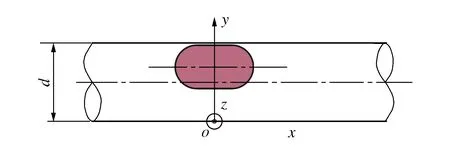
图8 管道内流体涡量比较参考坐标系
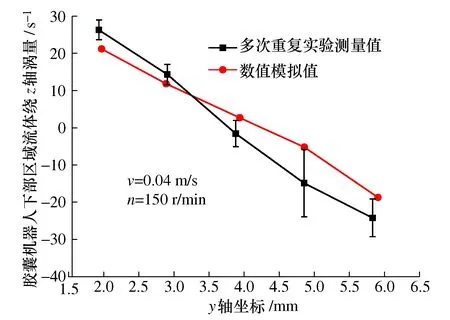
图9 胶囊机器人下部区域流体绕z轴涡量数值计算和实验测量的比较
从图9中可以看出,从管道底部往胶囊机器人底部方向,流体绕z轴涡量是从正值到负值,逐渐递减,并且多次重复实验测量结果有一定误差。数值模拟结果与PIV实验测量结果的变化趋势和数值大小基本吻合,证明本文所采用的CFD方法是合理和正确的。
4 基于机器人运行平稳的参数优化
均匀设计是基于试验点在整个试验范围内均匀散布的从均匀性角度出发的一种试验设计方法。因为当胶囊机器人在管内旋进运行过程中,机器人周围流体的湍流强度对其平稳度的影响最大,所以根据胶囊机器人周围流体湍流强度的大小的数值模拟结果来替代实验测量结果的均匀设计方法来优化机器人系统各类参数。
4.1 均匀设计数值模拟
选取对胶囊机器人周围流体湍流强度影响较大的4个参数作为数值模拟因素,分别是管道直径d、机器人平移速度v、机器人转速n和流体动力粘度η,分别用A、B、C、D表示这4个影响因素;每个因素设定5个水平数,各个因素的水平值在肠道胶囊机器人合理运行工况下均匀选取。影响胶囊机器人周围流体湍流强度的4个影响因素和5种水平如表1所示。
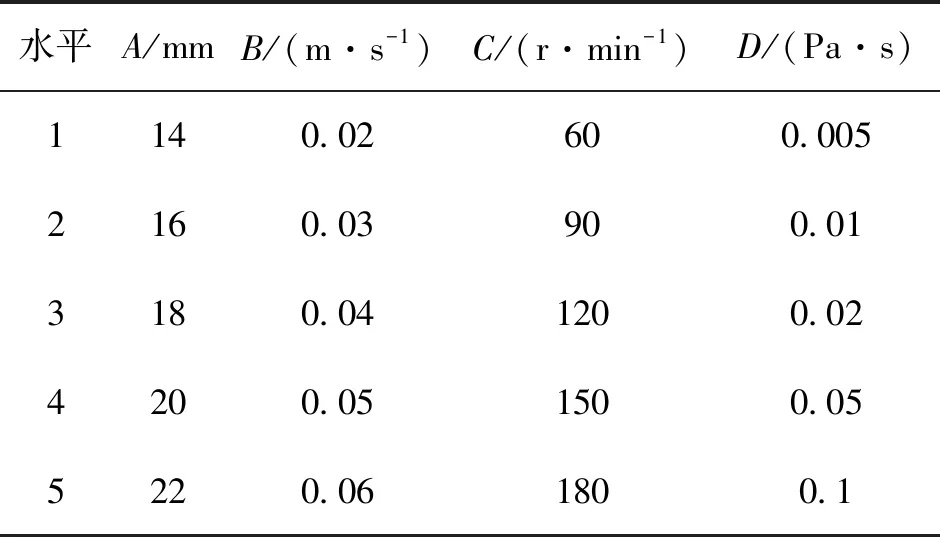
表1 影响胶囊机器人周围流体湍流强度的水平因素表
若按全部组合的625(54)种数值模拟方案,计算工作量很大,为了提高优化设计精度,参考U20(54)均匀表[18],选用次数较多的表2所示的20种均匀设计数值模拟方案。对表2中 20 组机器人系统参数全部进行系统建模、网格划分和数值计算,得到相应的胶囊机器人周围流体湍流强度大小。

表2 胶囊机器人周围流体湍流强度均匀设计数值模拟值
4.2 胶囊机器人周围流体湍流强度极差分析
通过对表2中同一水平和同一影响因素下的胶囊机器人周围流体湍流强度取平均值,进行数值模拟计算结果的极差分析,来体现各类参数对胶囊机器人周围流体湍流强度的影响程度的相对大小,如表3所示。

表3 胶囊机器人周围流体湍流强度的极差分析表
从表3中可以看出:胶囊机器人系统各类参数对机器人周围流体湍流强度的影响程度不同,影响程度的相对大小为:流体动力黏度>机器人平移速度≈机器人转速>管道直径,由此可以得出,胶囊机器人在充满粘液的管道内旋进运动过程中,流体动力粘度对胶囊机器人运行平稳度的影响程度比较大,管道直径对胶囊机器人运行平稳度的影响程度比较小,而机器人平移速度和转速对胶囊机器人运行平稳度的影响程度接近,略大于管道直径。
图9表明当胶囊机器人在管道中旋进时,每次实验测量结果之间存在误差,而表2和表3中的数值计算结果在满足网格无关性条件下基本保持不变,因此在均值极差数值计算结果相差不大时,各参数对机器人运行平稳度的实际影响程度相对相差也不大。表3中,流体动力粘度对机器人运行平稳度影响相对较大,说明当胶囊内镜实际检查肠道时,服用二甲硅油散和不同剂量纯净水可以改变胶囊内镜运行性能。另外,表3的极差分析中,暂未考虑4种因素的相互作用(类似B×C、A×B×C等)对胶囊机器人周围流体湍流强度的影响,这种情况更加复杂,并且各因素选定水平值的合适度也会影响该因素某水平对应计算出的性能指标均值极差的大小。
4.3 胶囊机器人系统参数优化
根据胶囊机器人在充满粘液管道内旋进运行时的平稳度(即以胶囊机器人周围流体湍流强度为指标)来优化胶囊机器人系统各类参数,选用各影响因素中胶囊机器人周围流体湍流强度水平均值最小的各类参数。由表3分析得出,胶囊机器人系统各类参数的最佳组合(胶囊机器人周围流体湍流强度最小)为A2B1C2D1,即管道直径d为16 mm,机器人平移速度v为0.02 m/s,机器人转速n为90 r/min,粘液动力粘黏度η为0.005 Pa·s,用这组优化的参数进行数值模拟计算,得到的胶囊机器人周围流体湍流强度为7.75%,小于均匀设计数值模拟中所得到的机器人周围流体最小湍流强度,证实了均匀设计方法的有效性。
4.4 胶囊机器人周围流体湍流强度回归模型
根据表2中的数值模拟结果,不考虑各因素间的相互作用,建立4个影响因素与胶囊机器人周围流体湍流强度之间统计关系的一次回归方程。即

(4)
采用最小二乘法[19],求得系数b0=4.720,b1=-0.013 6,b2=78.788,b3=0.013 7,b4=103.144,从而得到胶囊机器人周围流体湍流强度近似线性计算公式为
IT=4.720-0.013 6d+78.788v+0.013 7n+103.144η
(5)
式中:d为管道直径,mm;v为机器人平移速度,m/s;n为机器人转速,r/min;η为流体动力粘度,Pa·s。
5 结论
1) 设计制造了一套外部永磁体驱动的胶囊机器人系统和旋进时管内流体流场测量系统,采用CFD方法数值计算和PIV技术实验测量胶囊机器人旋进时管道内流体的涡量,理论计算和实验测量结果变化趋势和大小基本相同,证明本文所采用的CFD方法是合理和正确的。
2) 采用均匀设计数值模拟优化方法,数值计算了管道直径d、机器人平移速度v、机器人转速n和粘液动力粘度η对胶囊机器人平稳度(即机器人周围流体湍流强度)的影响规律,得到:胶囊机器人系统各类参数对机器人周围流体湍流强度的影响程度不同,其中,流体动力黏度>机器人平移速度≈机器人转速>管道直径的影响;胶囊机器人运行最为平稳时的各类参数的组合是:管道直径为16 mm,机器人平移速度为0.02 m/s,机器人转速为90 r/min,粘液动力粘度为0.005 Pa·s;并进一步求出胶囊机器人周围流体湍流强度一次回归模型。
3) 本文所采用的CFD方法、PIV技术和均匀设计方法可以广泛适用于胶囊机器人在液体管道环境中的流场计算、测量和优化设计。
