基于WVPSO算法的离心泵空化试验数据拟合
2022-06-25陈泽宇宋礼威范传翰张宇航肖幸鑫
陈泽宇,宋礼威,范传翰,张宇航,肖幸鑫,董 亮
(1.江苏大学流体机械工程技术研究中心,江苏 镇江 212031;2.中广核工程有限公司核电安全监控技术与装备国家重点实验室,广东 深圳 518124)
0 引 言
离心泵在运行过程中,如果泵的进口压力小于环境温度下的流动液体的饱和蒸汽压时,液体中便会有大量的蒸汽溢出,并与气体混合形成许多小汽泡,这些小汽泡随着水流流入高压区域,迅速凝结溃灭。汽泡的消失会导致局部的真空,液体质点快速冲向气泡中心,质点相互碰撞,产生很高的局部压力。如果汽泡在叶片表面凝结溃灭,则会以较强的作用力打击叶轮表面,使得叶轮表面遭受破坏,并且会伴随强烈的振动,这种现象称为泵的空化现象[1]。这种现象会导致离心泵的扬程下降、效率降低,并且引起泵剧烈振动,产生噪音。当空化恶化时流道内充满汽泡,堵塞流道,最终使泵失去工作能力[2-6]。因此,离心泵内部空化流动的研究对于离心泵的稳定、高效运行具有极其重要的意义[7]。
离心泵空化曲线的常规拟合方法有多项式拟合法、非线性拟合法、三次样条插值拟合法、最小二乘法、分段多项式拟合法。由于离心泵空化曲线的特殊性,空化曲线的形状会直接影响到临界空化余量(NPSH3)的取值[8]。为了获得更高的拟合精度,国内一些专家做出了很多尝试。其中刘在伦、单麟婷等[9]通过采用分段多项式拟合的方法提高了对离心泵空化曲线的拟合精度;李朴蓉、刘在伦等[10]通过MATLAB 平台对3 次、4 次、5次多项式以及非线性拟合方法的可行性进行了验证,最终发现5次多项式和非线性拟合方法适用于泵空化曲线的拟合;田莹、郭仁宁等[11]通过数值分析的方法详细介绍了分段多项式拟合方程的推导过程,并验证了分段多项式拟合方法能够使得空化曲线更加光滑;唐平、李金伴等[12]基于改进遗传算法对多项式拟合方程进行寻优求解,通过与常规拟合方法相对比,证明了此方法的可行性。
本文主要通过建立分段多项式拟合方法的数学模型,采用PSO、WVPSO 算法对分段多项式的拟合方程的系数进行求解。并通过对比常规多项式拟合方法与基于PSO、WVPSO 算法的分段多项式拟合方法对离心泵空化试验数据的拟合效果来验证WVPSO算法用于离心泵空化试验数据拟合的可行性。
1 概 述
1.1 空化曲线分段拟合定义及方法
在实际的空化曲线的拟合过程中,可用空化余量(NPSHA)与扬程(H)间并非存在一定的线性关系,常用的空化曲线的拟合方法大多为3次、4次、5次、6次多项式拟合,但这种多项式拟合方法易产生龙格(Runge)现象,使得拟合后的空化曲线的两端产生激烈的震荡[10]。因此,根据离心泵空化曲线的特点(如图1),拟采用分段拟合方法,设分段点(S),其值应在扬程开始有下降趋势附近。在S点的左边采用多项式拟合方法,拟合式如式(1)所示,S点右侧则采用直线拟合方法,拟合式如式(2)所示。

图1 离心泵空化特性曲线Fig.1 Cavitation characteristic curve of centrifugal pump

另外,为了使得两段拟合曲线在分段点S处连续且光滑,则要求式(1)、(2)在分段点处的函数值y1(S)=y2(S),导数y′1(S)=y′2(S)相等,即如式(3)、(4)所示:

联合式(3)、(4)化简可得:

因此,分段点S左侧部分的多项拟合式为:

则空化曲线拟合问题转换为求解最佳的a1,a2,k,b,S,使得式(2)、(7)在各数据点的函数值与实测值的误差平方和最小,即要求式(8)取得最小值。

式中:xtest、ytest为原始数据的横坐标和纵坐标。
通过对上述公式的推导和简化,可以发现这属于多参数的最小值优化问题,采用一般的数学方法难以解决该问题,因此只能采用寻优算法对该问题进行求解。
1.2 基本粒子群算法原理
基本粒子群算法(PSO)属于进化算法的一种,源于对鸟类捕食行为的研究,在PSO 中,每个优化问题的潜在解都被抽象为粒子,基本思想是通过个体与群体间的信息共享来寻找给定问题的最优解[13]。
假设在一个D维的目标搜索空间中,有N个粒子组成一个粒子群,其中第i个粒子表示为Xi=(Xi1,Xi2,…,XiD),其中第i个粒子的飞行速度记为vid,且粒子的当前搜索到的最优位置称为个体最优值,记为Pbest=(Pi1,Pi2,…,PiD),此时整个粒子群搜索到的最优位置称为群体最优值,记为gbest=(Pg1,Pg2,…,PgD),得到个体以及集体最优值后,粒子根据下式更新自己的速度和位置[14]:

式中:c1为个体学习因子;c2为群体学习因子;r1,r2为0~1之间的随机数。
1.3 WVPSO算法原理
针对基本粒子群算法(PSO)易陷入早熟、收敛速度慢和收敛精度不高等一系列问题,加权变异的粒子群算法(WVPSO)在以下3个方面进行改进[15]:
(1)为提高算法全局搜索能力的同时平衡其局部搜索能力,加权变异的粒子群算法(WVPSO)通过自适应权重和自适应学习因子的方法,对式(1)中的权重w和学习因子c1,c2自动调整;
(2)为了增加粒子群的多样性以及提高算法的搜索精度,加权变异的粒子群算法(WVPSO)通过在每次评估适应值后加入算数交叉和自然选择机制来择优改变粒子的位置和速度;
(3)为了避免算法陷入早熟的问题,加权变异的粒子群算法(WVPSO)通过在陷入早熟时加入高斯扰动,来让粒子能够尽量地跳出局部最优值。
变异加权粒子群(WVPSO)算法的主要计算步骤如下所示,主要步骤流程图如图2所示。

图2 WVPSO算法流程图Fig.2 Flow chart of WVPSO algorithm
(1)随机产生粒子并初始化粒子的位置和速度,组成粒子群,设定相关参数;
(2)根据式(11)~(13)计算粒子群的惯性权重w,学习因子c1和c2。

式中:Maxi为算法的最大迭代次数;i为算法当前最大迭代次数;c1up、c1low为粒子自我学习因子的上下界;c2up、c2low为粒子群体学习因子的上下界;rand为0~1之间的随机数。
(3)根据适应度函数计算粒子群中每个粒子的适应度,将每个粒子的适应度取绝对值,并将绝对值后的适应度值从小到大排列,如式(14)所示。将式(14)中的适应度值按照式(15)分割成四个部分,分别命名为ξ1、ξ2、ξ3、ξ4,其中ξ1、ξ4各占总体的20%,ξ2、ξ3各占总体的30%;

(4)将分割好的粒子适应度值中ξ2、ξ3这两组适应度值通过式(16)~(17)进行算术交叉计算,将ξ1、ξ4这两组值通过式(18)~(19)进行自然选择计算;
式中:xξ1、xξ2、xξ3、xξ4分别为ξ1、ξ2、ξ3、ξ4组各粒子的位置,中νξ1、νξ2、νξ3、νξ4分别为ξ1、ξ2、ξ3、ξ4组各粒子的速度,rand为0~1之间的随机数。
(5)根据式(9)~(10)更新每个粒子的位置和速度,以及每个粒子的历史个体最优值Pbest和群体最优值gbest,并且判断粒子是否陷入早熟,若陷入早熟则加入高斯扰动,让粒子震荡,使其摆脱早熟;
(6)经过上述步骤的计算,若满足终止条件,则输出最优结果,若未达到终止条件,则转入到步骤(2),进行下一次寻优计算。
2 空化试验装置及数据
本试验台为闭式试验台,试验装置主要由空化罐、真空泵、进出水管路、阀门、电磁流量计、试验泵、电机、压力变送器和水听器组成,离心泵选用AIX32/16 型号,其具体参数如表1所示,离心泵空化试验台示意图如图3所示,泵机组实物图如图4所示。空化试验分别在小流量、额定流量、大流量进行,通过开启真空泵改变离心泵进口压力值得到转速、流量为定值时的离心泵的扬程(H)值与可用空化余量(NPSHA)值。
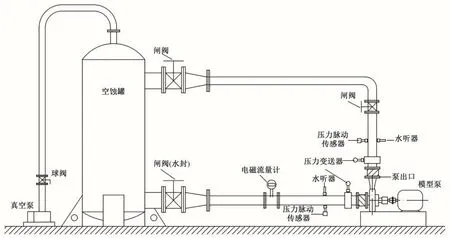
图3 离心泵空化试验台示意图Fig.3 Schematic diagram of centrifugal pump cavitation test rig

图4 离心泵机组实物图Fig.4 Physical picture of centrifugal pump unit
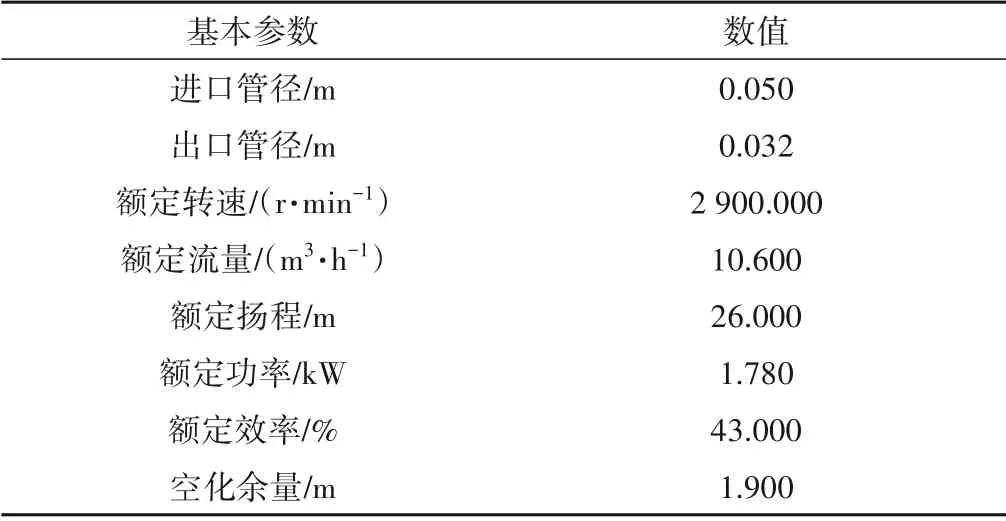
表1 离心泵机组基本参数Tab.1 Basic parameters of centrifugal pump unit
本文选用NPSHA(m)=[0.91,0.92,0.93,0.99,1.06,1.17,1.29,1.39,1.95,2.03,2.19,2.4,2.71,3.36,4.81,6.15];H(m)=[21.72,22.06,22.83,23.34,23.47,23.52,23.53,23.54,23.55,23.55,23.54,23.55,23.55,23.55,23.56,23.56],其中NPSHA和H值均已转换到额定转速下的值。
3 拟合结果
3.1 多项式拟合结果
通过采用3 次、4 次、5 次、6 次多项式拟合方法对离心泵空化试验数据进行拟合,拟合结果如图5所示。


图5 多项式拟合结果Fig.5 Polynomial fitting results
通过对比图5中3 次、4 次、5 次、6 次多项式拟合曲线,可以看出,相对于3 次、4 次、6 次多项式拟合曲线5 次多项式拟合曲线更为光滑,更能够贴合数据点。且随着多项式拟合的次数越高,拟合曲线在数据点稀疏的地方产生的震荡现象尤为明显。
因此3 次、4 次、6 次多项式并不适用于离心泵空化试验数据的拟合,5次多项式适用于空化试验数据点较为密集的情况,当数据点稀疏时,5 次多项式拟合曲线也会在稀疏点处产生震荡现象。
3.2 PSO与WVPSO拟合结果
对于本文使用的空化试验数据,经过实际的反复试算,PSO和WVPSO 算法的相关运行参数设置如下:初始粒子群规模M=50;最大迭代次数T=1 000;粒子飞行速度上限Vmax=2;粒子飞行速度下限Vmin=-2;WVPSO 的粒子自身学习因子上限c1up=2.5;下限c1low=0.5;群体学习因子的上限c2up=3.5;下限c2low=0.8。
运行参数设置完成后,通过MATLAB 平台分别运行PSO 和WVPSO,其中PSO 和WVPSO 的寻优迭代曲线如图6所示,寻优后最佳的a1、a2、k、b、s值如表2所示。

表2 PSO、WVPSO寻优后最佳参数值Tab.2 Optimal parameter values of PSO and WVPSO after optimization
从图6中可以看出,PSO 算法的迭代曲线呈阶梯式下降的趋势,而WVPSO算法的迭代曲线呈直线式下降趋势。约200次迭代后WVPSO 算法的适应度值接近于0,而PSO 算法的适应度即使在1 000 次迭代后仍然与0 有一定差距。相比之下,WVPSO 算法对于离心泵空化试验数据拟合的收敛速度更快,收敛精度更高。

图6 PSO、WVPSO迭代曲线Fig.6 Iteration curves of PSO and WVPSO
上述值代入到式(5)~(6)中计算得出a3、a4,将参数分别代入到分段拟合方程(1)~(2)中得到离心泵空化曲线,如图7所示。
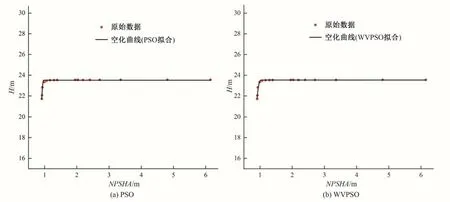
图7 PSO、WVPSO算法空化试验数据拟合图Fig.7 Fitting diagram of PSO and WVPSO algorithm cavitation experiment data
对比PSO 和WVPSO 这两种算法对于空化试验数据拟合的效果,WVPSO 算法在空化曲线分段拟合曲线拐点处的连接比较光滑,且空化曲线能够很好的贴合数据点。而通过PSO 算法拟合的空化曲线在拐点处未能很好地贴合数据点,导致拐点处的连接不光滑,拟合效果欠佳。因此WVPSO 算法对离心泵空化试验数据的拟合效果要优于PSO算法。
将常规多项式拟合方法与基于WVPSO 算法的分段多项式拟合方法相比较可以发现,WVPSO 算法的分段多项式拟合方法能够有效的消除多项式拟合方法产生的震荡现象,并且能够使得空化曲线更光滑。
4 结 论
本文依据空化曲线的拟合方法为研究对象,搭建了卧式离心泵闭式空化试验台,采集了空化试验数据。通过不同拟合方法对试验数据进行拟合与分析,现得出如下几点结论。
(1)在常规多项式拟合方法中,5 次多项式拟合方法对于空化试验数据的拟合效果最好,但在数据点稀疏的情况下易使空化曲线产生震荡现象。
(2)相比于PSO 算法,WVPSO 算法对于空化试验数据的拟合具有收敛速度快、收敛精度高、分段多项式拐点处更光滑等特点。
(3)对于常规多项式拟合方法中空化曲线出现的震荡现象,使用WVPSO 算法对空化试验数据进行拟合能够有效消除,使得空化曲线更加光滑,拟合效果更好。
