电助力自行车模型参考自适应扭矩控制研究
2022-06-23张懿陆腾飞魏海峰李垣江徐松
张懿, 陆腾飞, 魏海峰, 李垣江, 徐松
(江苏科技大学 电子信息学院,江苏 镇江 212000)
0 引 言
近年来,以永磁同步电机作为主要驱动装置的电动自行车已经成为我国交通体系中的重要组成部分,其中新兴起的一种电动助力自行车以骑行者的踩踏力矩为基础力矩,在起步、上坡等情况下电机输出附加力矩,既延续了传统自行车骑行轻便的特点,又具有起步轻松,上坡省力的优点。其中,当电动助力自行车在载重变化或者道路坡度变化时,助力扭矩如何计算成为研究的难点,助力扭矩的输出效果决定了骑行者的骑行平稳性,更涉及到骑行者的安全。因此,助力扭矩控制方法的研究对电动助力自行车的发展至关重要[1-5]。
目前国内市场上出现的电动助力自行车控制系统主要分为无力矩传感器的控制系统和有力矩传感器的控制系统,其中无力矩传感器的控制系统使用较广,其控制原理为,使用霍尔元件测量骑行者的踩踏速度,通过助力比来计算电机的输出扭矩,有力矩传感器的控制系统则直接依据骑行者的踩踏力度来计算电机的输出扭矩,采用这种控制方式的控制系统,电机的输出扭矩对人的踩踏力有较强的跟随性。文献[6]提出建立扰动观测器的控制方法,通过采集速度信号和踏板力信号来估计道路坡度和车身负载;文献[7]提出一种基于模型跟随控制的扭矩控制方法,通过处理速度和踩踏力信号来消除路面坡度和负载对车辆的干扰;文献[8]为了提高估计精度,使用电机参数识别方法来估计在倾斜路面中施加的踏板扭矩;文献[9]设计了基于神经网络算法的电动助力车控制器,通过计算神经网络回归后的隶度函数,调节控制器速度环中的参数,对电机转速进行实时控制,使电机输出对脚踏速度有很强的跟随特性。从上述方案研究情况来看,在无力矩传感器的控制系统方案中,通过估算踩踏力信号来控制电机输出扭矩,导致系统有较大的延时,无法获得较好的跟随性;在有力矩传感器的控制系统方案中,电机输出需要复杂的建模分析,对电机控制器的主控芯片要求较高,且无法保证整个系统的稳定性。
本文在有力矩传感器的控制系统基础上,提出可调增益模型参考自适应控制方法(model reference adaptive control,MRAC),使用Lyapunov第二法推导MRAC可调增益自适应控制率,保证控制系统具有全局渐近稳定性[10-19],该方法通过力矩传感器获得准确实时的踩踏力信号,系统对踩踏力信号实时监测捕获,通过模型参考自适应算法计算电机输出的力矩,以确保电机输出的力矩对脚踏信号有很强的跟随特性;数学模型简单,对控制器资源占用率较小,且能保证系统的运行稳定性。并在MATLAB/Simulink中建立被控对象数学模型,通过仿真结果对比和实车路况测试输出结果的对比,验证在载重变化和坡度变化情况下该控制算法的有效性和可靠性。
1 电动助力车系统模型
电动助力自行车在不同路况行驶过程中,会受到来自不同方面的阻力作用,在水平路面上行驶会受到来自空气的阻力、车轮与地面的摩擦力等,在上坡路面上行驶还会受到重力分量的阻力等,为了简化分析,特做出以下假设:
1)忽略风阻等其他因素对助力车的影响,只考虑车辆载重和路面坡度两个因素对其运行状态的影响;
2)助力车直线行驶,忽略车轮与地面的相对摩擦;
3)电动助力车前后车轮直径相同。
建立满足上述假设条件的电动助力车纵向动力学模型,如图1所示。
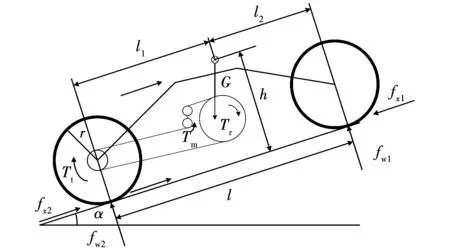
图1 助力自行车纵向动力学模型
根据车辆整体受力分析,由纵向动力学模型可以得到:
(1)
(2)
式中:fw1、fw2分别为作用在前轮、后轮上的地面法向反作用力;G为助力自行车与骑行者的总重力;l1为助力自行车的重心到后轮中心之间的距离;l2为助力自行车的重心到前轮中心之间的距离;α为路面坡度;h为助力自行车与骑行者整体的质心高。由于助力自行车使用后轮驱动方式,根据力矩平衡分析前从动轮和后驱动轮的地面切向反作用力,即:
(3)
(4)
式中:fx1、fx2分别为作用在前从动轮和后驱动轮的地面切向反作用力;Tf1、Tf2分别为作用在前、后轮上的滚动力矩;r为前轮、后轮的车轮半径。
根据上述分析,车辆系统动力学微分方程为
(5)
式中:Tt为驱动轮输出扭矩;Tm为驱动链轮输出扭矩;im为驱动链轮与后小链轮减速比;Tr为大链轮输出扭矩;ir为大链盘与后小链轮减速比;Jr为驱动轮的转动惯量;ω为驱动轮角速度;Fd为助力自行车驱动力,运动方程为
(6)
式中M为助力车与骑行者的总质量。
以上系统建模分析用于下面的助力扭矩控制算法研究。
2 模型参考自适应控制算法
模型参考自适应控制的系统结构如图2所示。
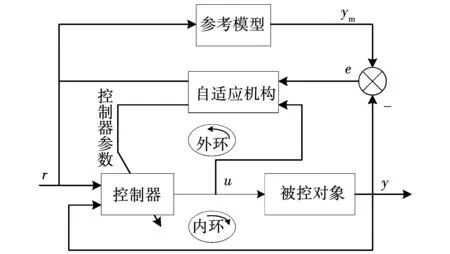
图2 模型参考自适应控制系统结构
模型参考自适应控制系统的基本工作原理为:设计参考模型,其状态方程与被控对象的状态方程一致,达到模型完全匹配的条件,参考模型的状态方程参数设计即表明被控对象的理想输出应如何对输入信号做出响应,具体参数值经测试经验得出,使参考模型的输出结果ym符合可调系统的期望输出响应,自适应机构根据参考模型输出与被控对象输出的差值产生一个自适应控制律,使被控对象的输出或状态逐步趋向于参考模型的输出或状态,最终获得期望的可调系统输出。采用Lyapunov第二法推导模型参考自适应系统的自适应律,与采用局部参数优化方法设计的自适应系统相比,该方法保证了系统具有全局渐近稳定性,并且在受到干扰时系统具有更好的动态特性。
图3为可调增益MRAC系统结构。
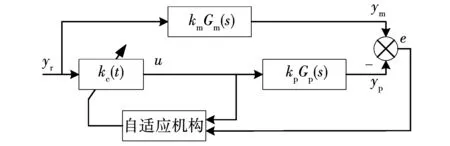
图3 可调增益MRAC系统结构
设对象模型和参考模型的传递函数分别为:
(7)
(8)
式中kp为未知或慢时变的增益,km、n、ai、bi(i=0,1,…,n-1)均已知。控制器增益kc(t)用来补偿对象参数kp,可调增益kc(t)的调节规律由Lyapunov第二法稳定性理论获得,被控对象实际输出趋向于参考模型输出,差值e趋向于0。由图3的系统结构可得
(9)
式中
k=km-kc(t)kp。
(10)
将式(9)转化为状态空间可观规范型为:
(11)
ATP+PA=-Q。
(12)
选择Lyapunov函数为
V=γ′xTPx+k2,γ′>0。
(13)
则
(14)
利用式(11)和式(12)得
(15)

(16)
由于kp未知或慢时变,可将其当作常数处理,则由式(10)得系统的自适应律为
(17)
由式(17)可知,此时的自适应律要求所有状态变量可测,在应用中受到限制,需继续变换。式(11)的传递函数G(s)=c(sI-A)-1b为严格正实函数的充要条件是:存在正定矩阵P和Q,使得:
(18)
(19)
式中,γ=γ′/kp为自适应律,γ>0。
式(19)的自适应律结构图如图4所示。
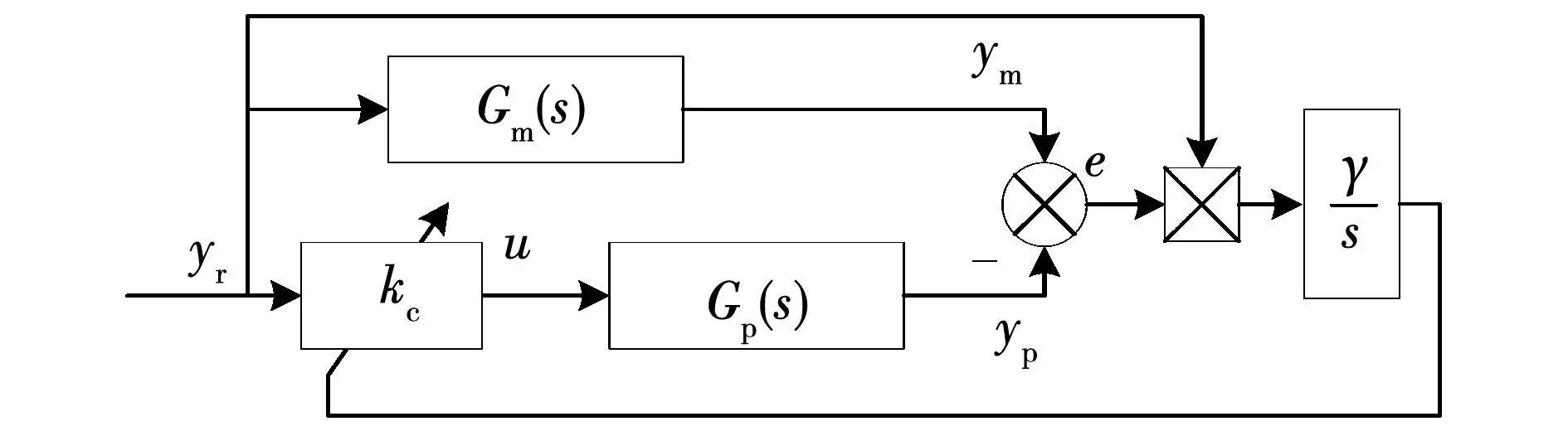
图4 Lyapunov-MRAC系统结构
由图4可知,系统的控制率为
u(t)=kc(t)yr(t)。
(20)
(21)
式中J为实际车辆模型中路面坡度、载重改变等外部因素影响下的等效转动惯量。
根据式(21),可以求得参考模型的传递函数为
(22)
式中:Jm为参考模型下的转动惯量;Jf、Jr分别为车辆前后轮的转动惯量。
综上,电动助力车的模型参考自适应控制算法如图5所示。
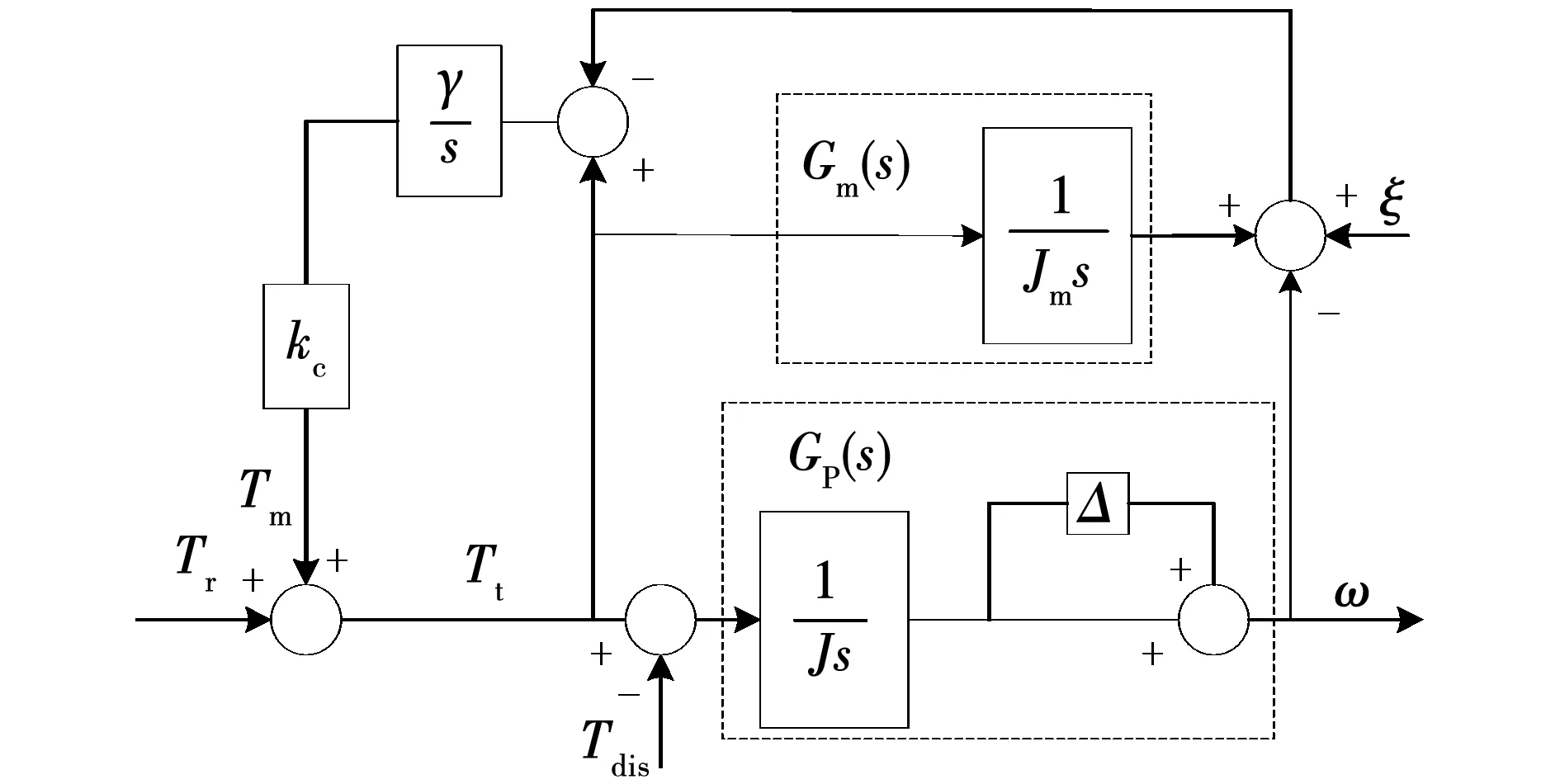
图5 车辆自适应助力扭矩控制算法设计框图
图5中:骑行者踩踏力矩Tr作为系统输入;驱动轮角速度ω作为系统输出;ξ为传感器噪声;Tdis为坡度或载重变化造成的阻力矩;Δ为车辆对象模型内部参数变化。该自适应控制算法建立车辆在不同行驶状态下的参考模型,在每个系统周期内,将车辆实际行驶状态与参考模型的状态对比,电机根据对比结果进行扭矩补偿,使对象模型的输出与参考模型的输出一致,达到自适应调节扭矩的目的,电机输出扭矩为
(23)
式中:为τ2电机的输出扭矩;C为自适应增益系数;k为助力比;Tr为踩踏力矩。
3 仿真与实验结果
为了进一步验证算法的控制效果,将自适应控制方案与开环1:1控制方案作对比验证。开环1:1控制方案采用无力矩传感器的控制方案,使用霍尔元件测量骑行者的踩踏频率,通过助力比来计算电机的输出扭矩,其关系式为
τ1=kpf。
(24)
式中:τ1为电机的输出扭矩;kp为助力比;f为踩踏频率。在该控制方案中电机提供的助力扭矩与踩踏频率成正比,当助力比为2时,关系曲线如图6所示。
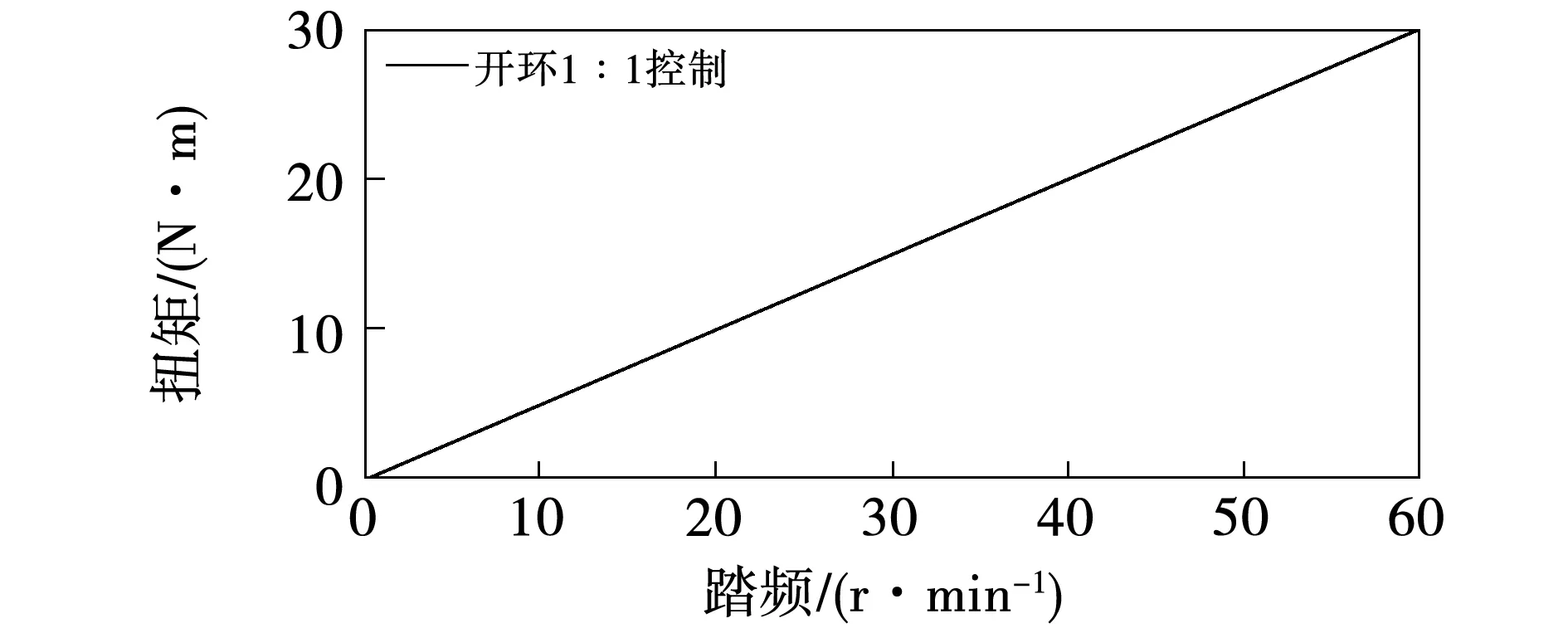
图6 助力扭矩与踩踏频率的关系曲线
实验包括以下两个方面:1)利用MATLAB/Simulink搭建自适应控制算法与整车模型,进行实时仿真验证;2)搭建试验平台,通过实车路况测试验证该算法的有效性。
3.1 MATLAB/Simulink仿真
基于模型参考自适应控制算法中的自适应增益系数与助力比相关,而在不同车速下助力比并不相同,因此需确定在不同车速下的自适应增益系数。根据工业标准,助力车的速度在25 km/h以下时,不同车速下电机提供的助力扭矩与踩踏力矩的比值不同,如图7所示,助力比与助力车的行驶速度有如下关系:当车速在0~10 km/h范围内时,助力比为2;当车速在10~25 km/h范围内时,助力比为
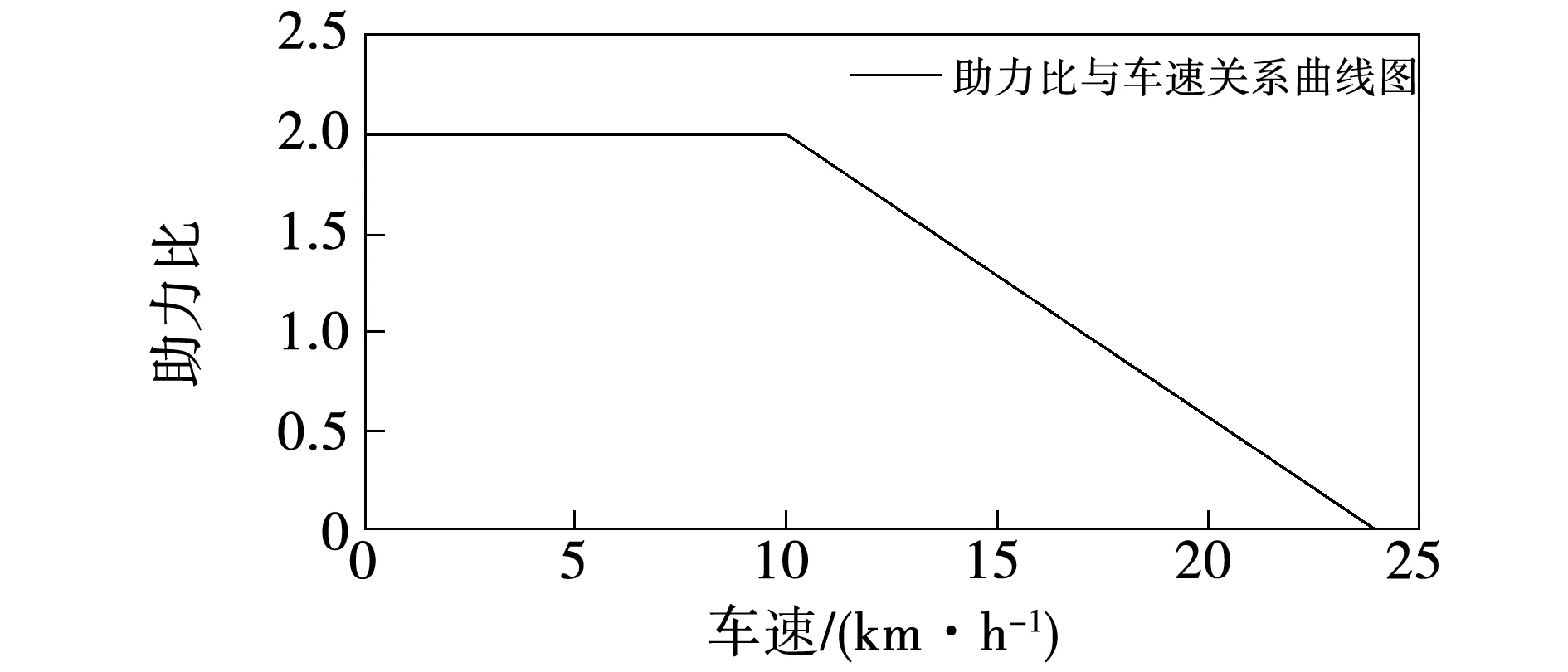
图7 助力比与车速的关系曲线
(25)
式中:k为助力比;v为助力车的速度。
为了保证助力自行车在使用自适应控制算法后的助力比仍能满足上述比值,需要确定理想情况下的增益系数与车速的关系。在仿真设置中,设置载重60 kg,设置路面为水平路面,通过不断调整自适应增益系数,获得满足上述关系的自适应增益系数与车速的曲线图,如图8所示。
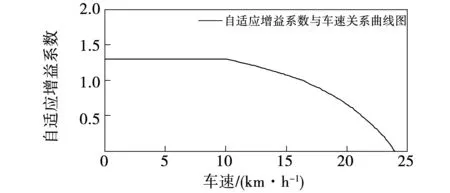
图8 增益系数与车速的关系曲线
3.1.1 在不同载重下的仿真分析
在仿真设置中,设置电机模块为三相、正弦波激励的PMSM电机,设置电压源为36 V,设置载重为单一变量,车辆载重分别为60、90 kg,设置路面为水平路面,给定15 N·m恒定踩踏力矩和18 r/min恒定踩踏频率。在仿真分析中,为保证算法对比效果,设置车速与踩踏频率无关,消除踩踏频率对车速的影响,着重比较在不同算法控制下助力扭矩的控制效果。固定踩踏频率是为了保证开环1∶1控制情况下,电机输出助力扭矩的稳定性,仿真中的车辆加速依靠电机输出的助力扭矩。记录在自适应控制算法下的车辆行驶速度,电机输出扭矩和负载扭矩,并与开环1∶1控制系统输出结果作比较,对比结果如图9所示。
由图9(a)、(b)对比可知,采用开环1∶1控制情况下,改变车辆载重对车速影响较明显;采用自适应控制情况下,车辆载重的变化对车辆速度影响较小,说明基于模型参考自适应的控制算法具有良好的载重适应性能。
由图9(c)可知,采用开环1∶1控制情况下,电机扭矩只与踩踏频率有关,因此在载重变化时,电机扭矩保持恒定,无法达到随载重变化的理想效果;采用自适应控制情况下,电机扭矩跟随载重变化做出自适应调节,在车辆起步阶段,电机输出较大助力扭矩,随着车速上升,助力扭矩逐渐减小,在车速达到国家限速标准25 km/h后,系统停止输出助力扭矩,满足助力比与车速的关系曲线图。
在理想的无摩擦状态下,且电机不经减速器等环节而直接作用在负载上,助力自行车的电磁转矩等于输出转矩,因仿真中转轴、方向相同,故负载扭矩为踩踏力矩与电机助力扭矩的矢量叠加,负载扭矩随时间的变化曲线如图9(d)所示。
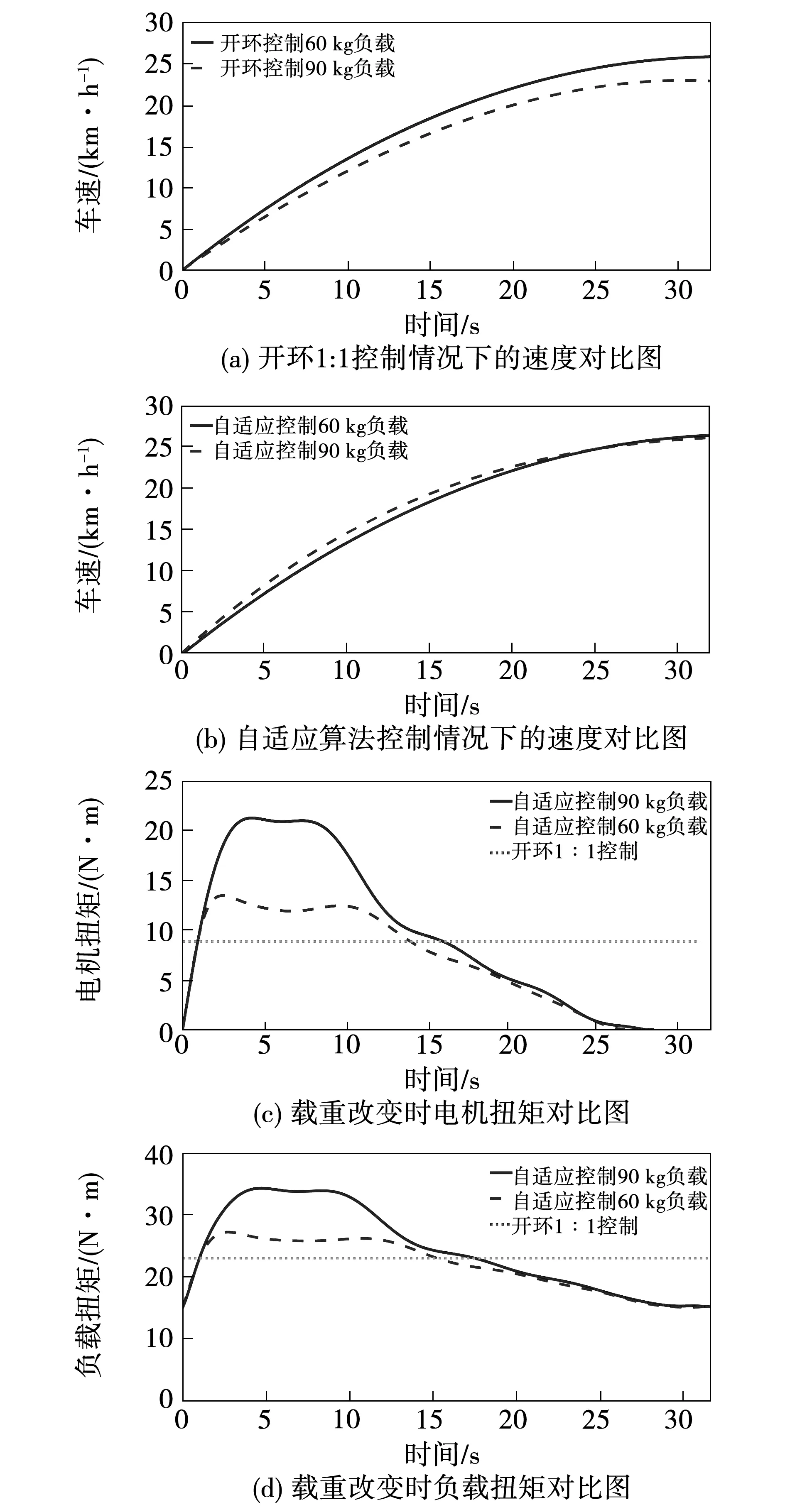
图9 在水平路面上及60、90 kg载重条件下的仿真结果
助力自行车首先带有60 kg负载骑行,在27 s车速稳定时额外增加30 kg负载,在45 s车速稳定后,减掉30 kg负载,在该运动过程中,电机的输出扭矩变化曲线如图10所示。在自适应控制情况下,负载增加时,助力扭矩也随之变大,在减掉负载时,因车速已达到25 km/h,电机保持无助力扭矩输出,充分了证明自适应控制方法的有效性。
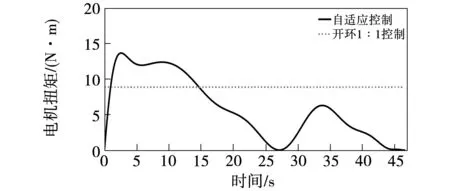
图10 在水平路面、载重改变条件下的仿真结果
3.1.2 在不同坡度路况下的仿真分析
在仿真设置中,设置电机模块为三相、正弦波激励的PMSM电机,设置电压源为36 V,设置路面坡度为单一变量,由水平路面分别进入10%、20%坡度的路面,设置载重为60 kg,给定15 N·m恒定踩踏力矩和18 r/min恒定踩踏频率。记录在自适应控制算法下的车辆行驶速度,电机输出扭矩和负载扭矩,并与开环1∶1控制系统输出结果作比较,对比结果如图11所示。
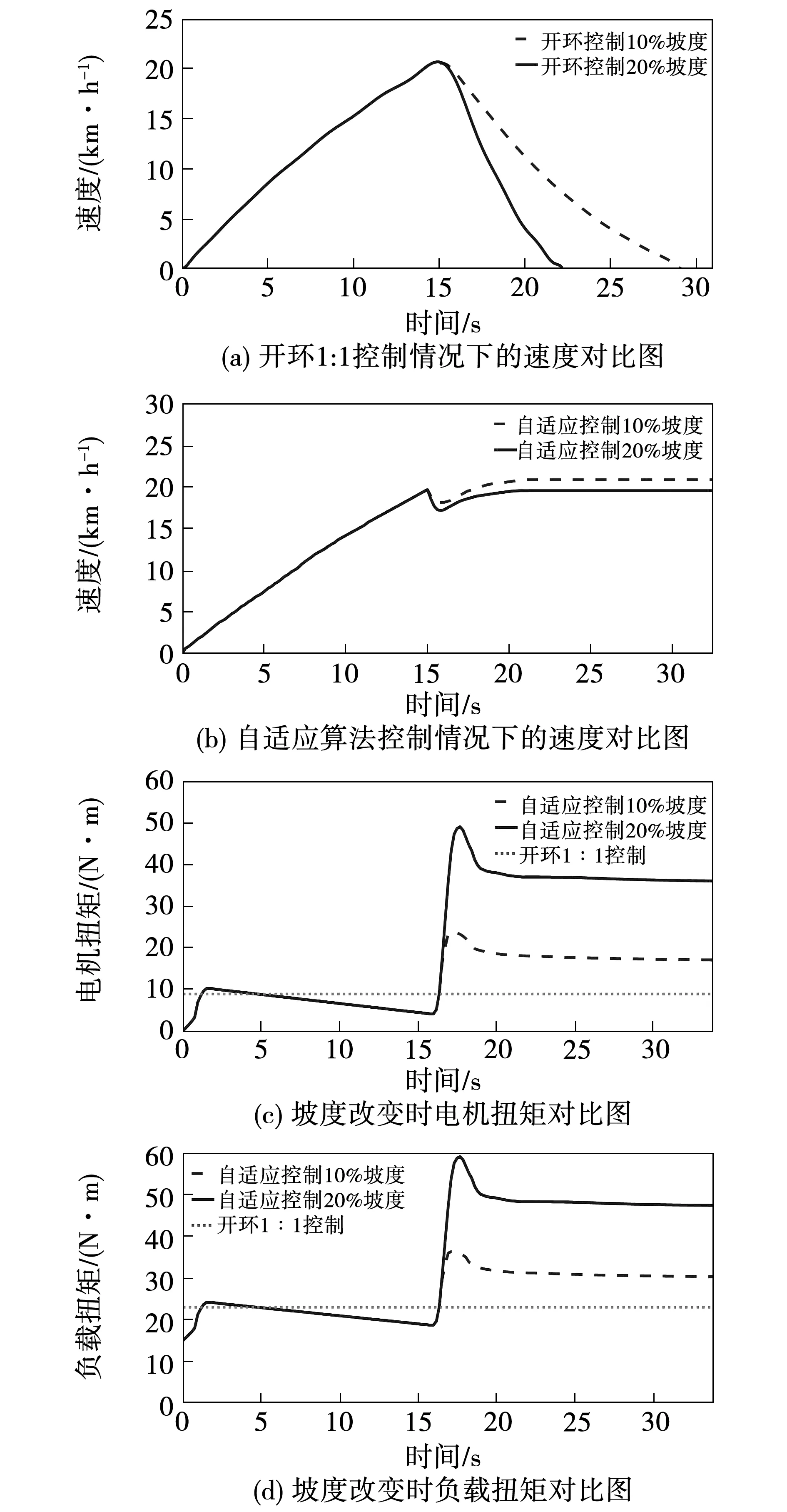
图11 在10%、20%坡度路面上及60 kg载重条件下的仿真结果
由图11(a)、(b)对比可知,采用开环1∶1控制情况下,车辆由水平路面进入上坡道路后,系统受到较大干扰,车辆速度下降较为明显;采用自适应控制情况下,车辆上坡后,会经历一个时间较短的减速阶段,经自适应机构调节后,电机输出扭矩增大,车辆仍能保持稳定上坡行驶,说明基于模型参考自适应的控制算法具有良好的路面坡度适应性能。
由图11(c)可知,采用自适应控制的情况下,电机扭矩跟随路面坡度变化做出自适应调节,保证在上坡路面维持较为稳定的车辆行驶状况。
负载扭矩随时间的变化曲线如图11(d)所示,因仿真中转轴、方向相同,故负载扭矩为踩踏力矩与电机助力扭矩的矢量叠加。
助力自行车在16 s时由水平路面进入10%坡度的路面,在26 s时由10%坡度路面进入20%坡度的路面,在33 s进入下坡道路,在该运动过程中,电机的输出扭矩变化曲线如图12所示。在自适应控制情况下,坡度改变时,助力扭矩会随之改变,使骑行人员可以轻松爬坡,在下坡速度到达25 km/h时,电机停止输出助力扭矩。
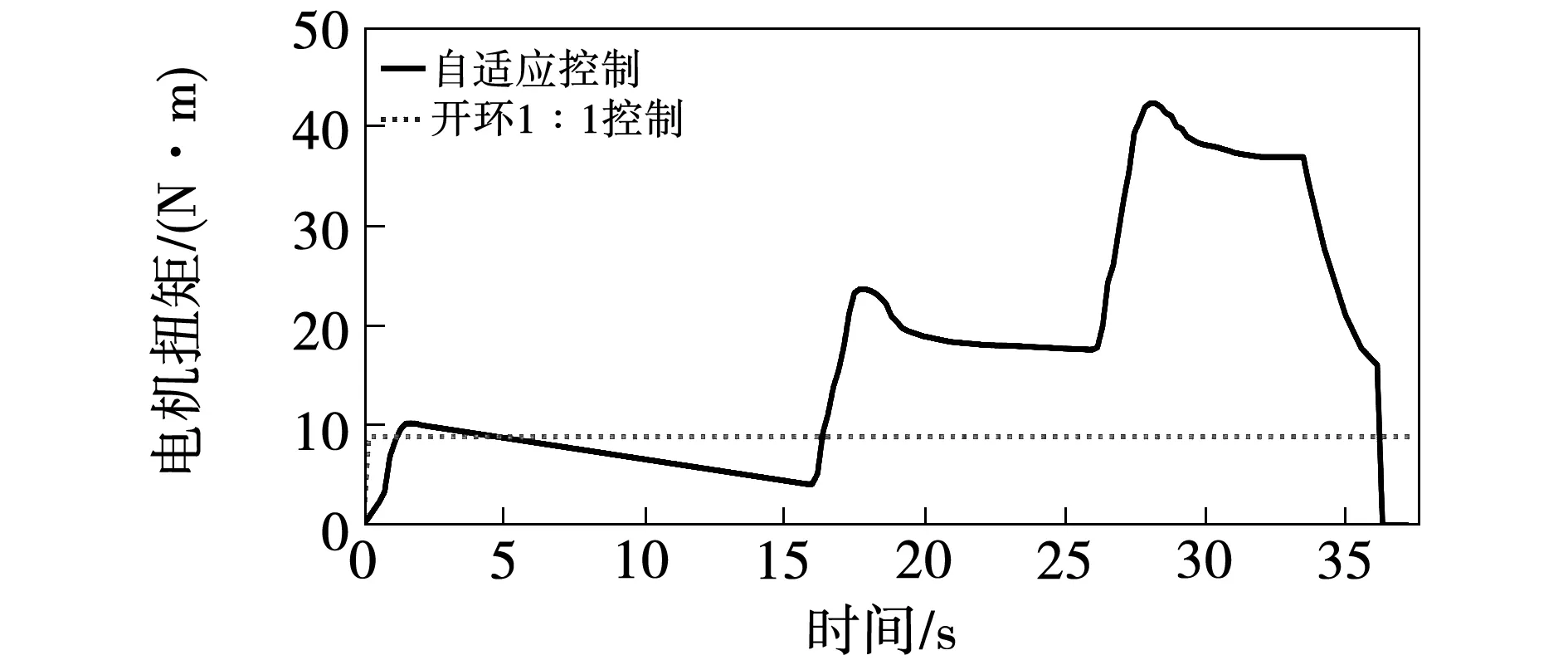
图12 在坡度改变的路面、60 kg载重条件下的仿真结果
3.2 实车路况实验
为了对自适应扭矩控制算法进行实验研究,在某助力自行车上进行实车测试,所用助力车和力矩传感器如图13所示。

图13 电动助力车实物图
该电动助力车包括车架、锂电池、中置电机、电机控制器、力矩传感器、功能仪表等部件,具体参数如表1所示。
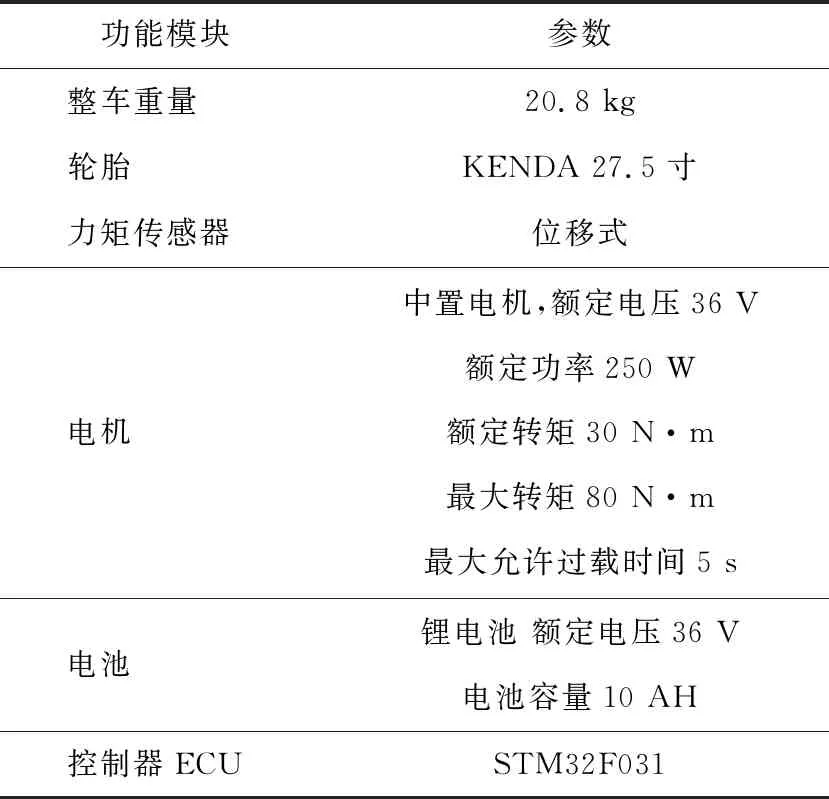
表1 电动助力车参数
助力车行驶过程中骑行者的踩踏力矩输出无法保证恒定,为遵循单一变量原则,实验时在控制器软件层面给定恒定踩踏力矩,保证输入量统一,在不同车速下动态给定自适应增益系数,给定关系如图8所示,车辆骑行人员始终保证为同一人,体重约为60公斤。在车辆实际载重变化或者坡度变化情况下,记录在自适应控制情况下的车辆行驶速度和相电流,并与开环1∶1控制系统输出结果作比较。
3.2.1 载重骑行实验
实验条件设置如下:电动助力车在平坦笔直道路上行驶,无障碍物干扰;控制器软件层面设置恒定踩踏力矩为15 N·m和18 r/min最大踩踏频率;车速与踩踏频率有关,车辆加速由踩踏频率和助力扭矩共同作用。通过在车辆上增加30 kg负载物品来区分有无负载。
在开环1∶1控制情况下,给助力车增加30 kg负载后,起步速度明显变慢,如图14所示,这是因为此时电机提供的扭矩仍然是由15 N·m的踩踏力矩计算而来的,导致加速度减小,起步速度变慢。
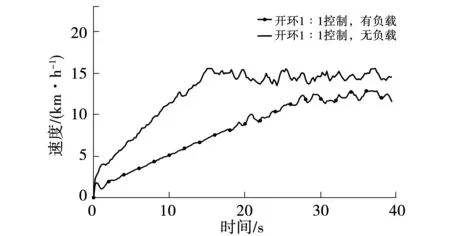
图14 开环1∶1控制情况下车速对比图
在自适应控制情况下,给助力车增加30 kg负载后,与无负载相比,起步速度并没有发生显著改变,如图15所示,说明自适应控制系统能较好的适应载重变化,保证车辆的行驶状态不受载重变化干扰。
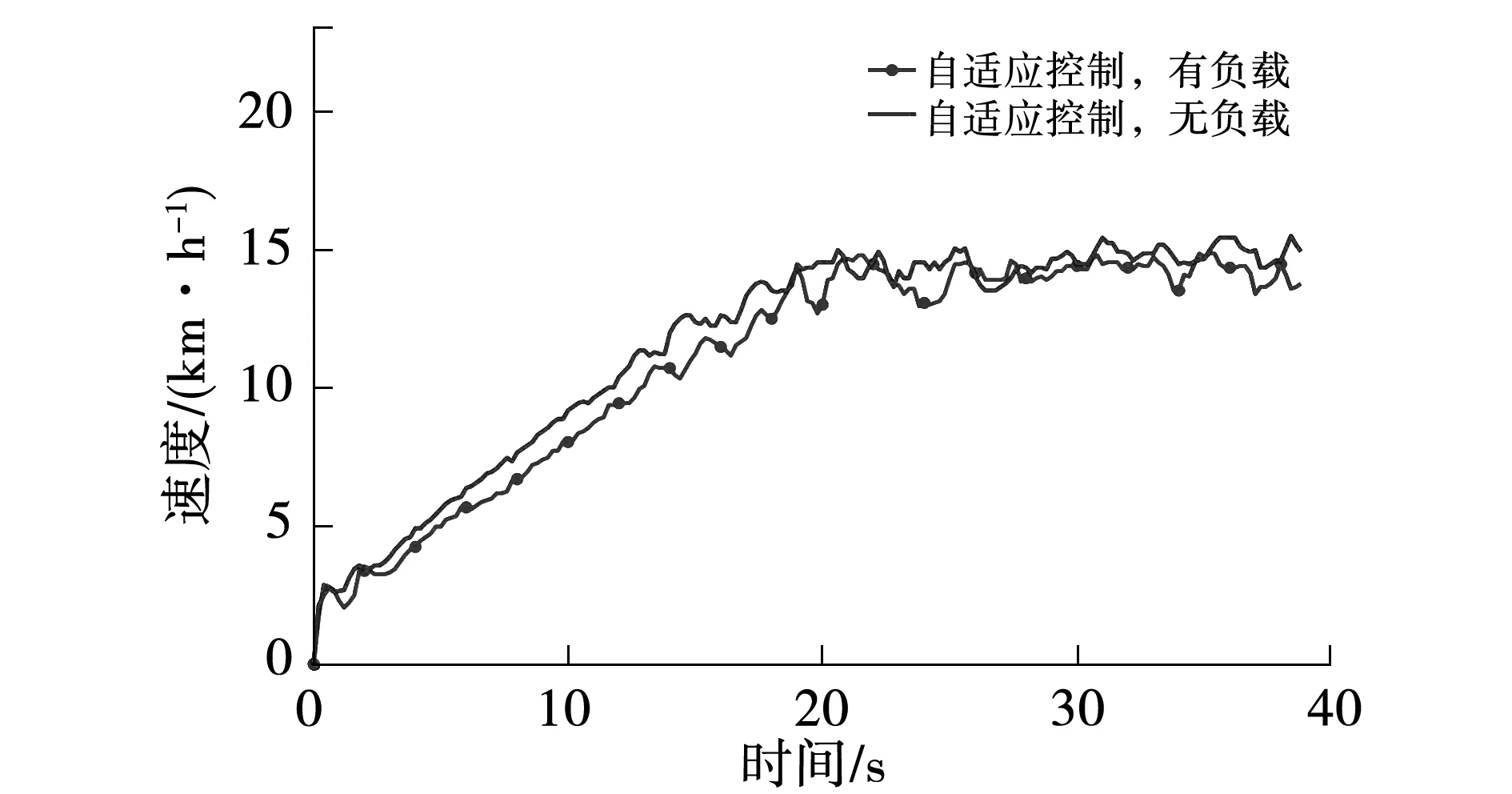
图15 自适应控制情况下车速对比图
图16为车辆在自适应控制情况下,在有负载和无负载两种状态下匀速行驶的相电流波形图,给助力车增加30 kg负载后,相电流比无负载状态下增加约4 A,助力扭矩随电流增加而增大,说明自适应控制系统可以依据载重变化对电机输出扭矩做出动态调整。
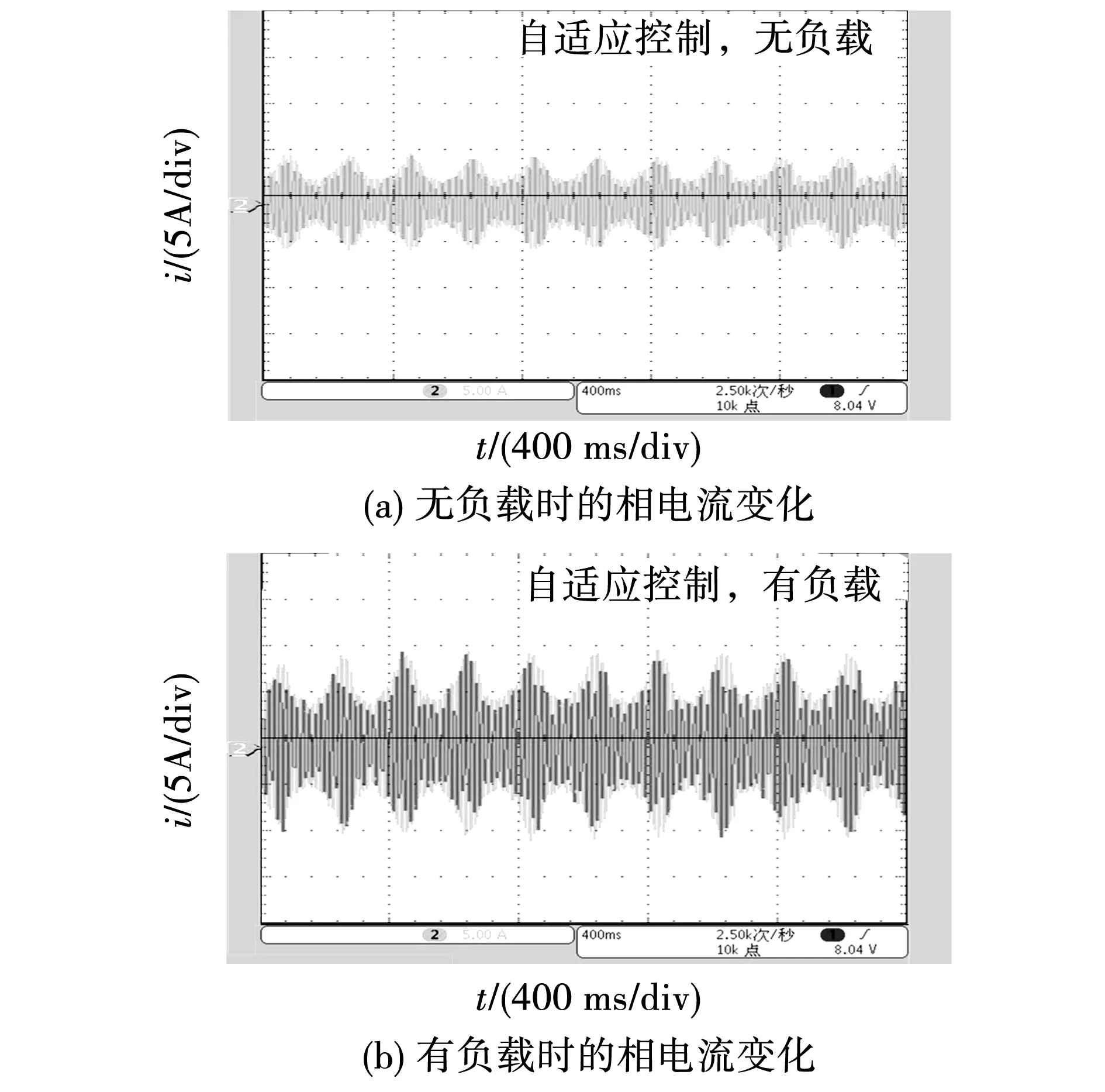
图16 自适应控制情况下相电流对比图
3.2.2 上坡骑行实验
实验条件设置如下:电动助力车由平坦笔直道路行驶进入20%坡度的上坡道路,无障碍物干扰,控制器软件层面设置恒定踩踏力矩为15 N·m和18 r/min最大踩踏频率,无任何负载。
图17为电动助力车在平坦路面起步,速度稳定后进入上坡路段过程中的速度变化。助力车在38 s前行驶在平坦路面,自适应控制系统与开环1∶1控制系统无显著差别,在38 s时进入上坡路段,由于横向重力分量增大,行驶阻力增加,开环1∶1控制情况下行驶速度急剧下降,而自适应控制情况下行驶速度缓慢下降,没有发生速度骤变的情况,说明自适应控制系统能很好的补偿上坡路段带来的前行阻力,从而获得较好的上坡骑行体验。与仿真结果相比,实车路况实验中,自适应控制情况下电动助力车由于地面摩擦阻力、纵向风阻力、电机扭矩传动损耗等原因,15 N·m踩踏力矩提供的助力扭矩比理想情况下略小,故在上坡后速度逐渐减小。
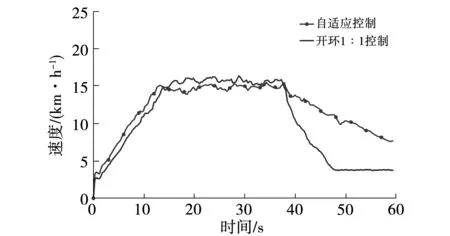
图17 行驶速度对比图
图18为电动助力车在平坦路面起步,速度稳定后进入上坡路段过程中的相电流变化,可以看出,在进入上坡路段后,自适应控制系统逐渐增大相电流,助力扭矩随着相电流增大而变大,以提供助力车上坡的动力,而开环1∶1控制系统的相电流发生震荡,平稳后相电流值不变,助力扭矩不变,上坡动力不足,因而速度骤减。
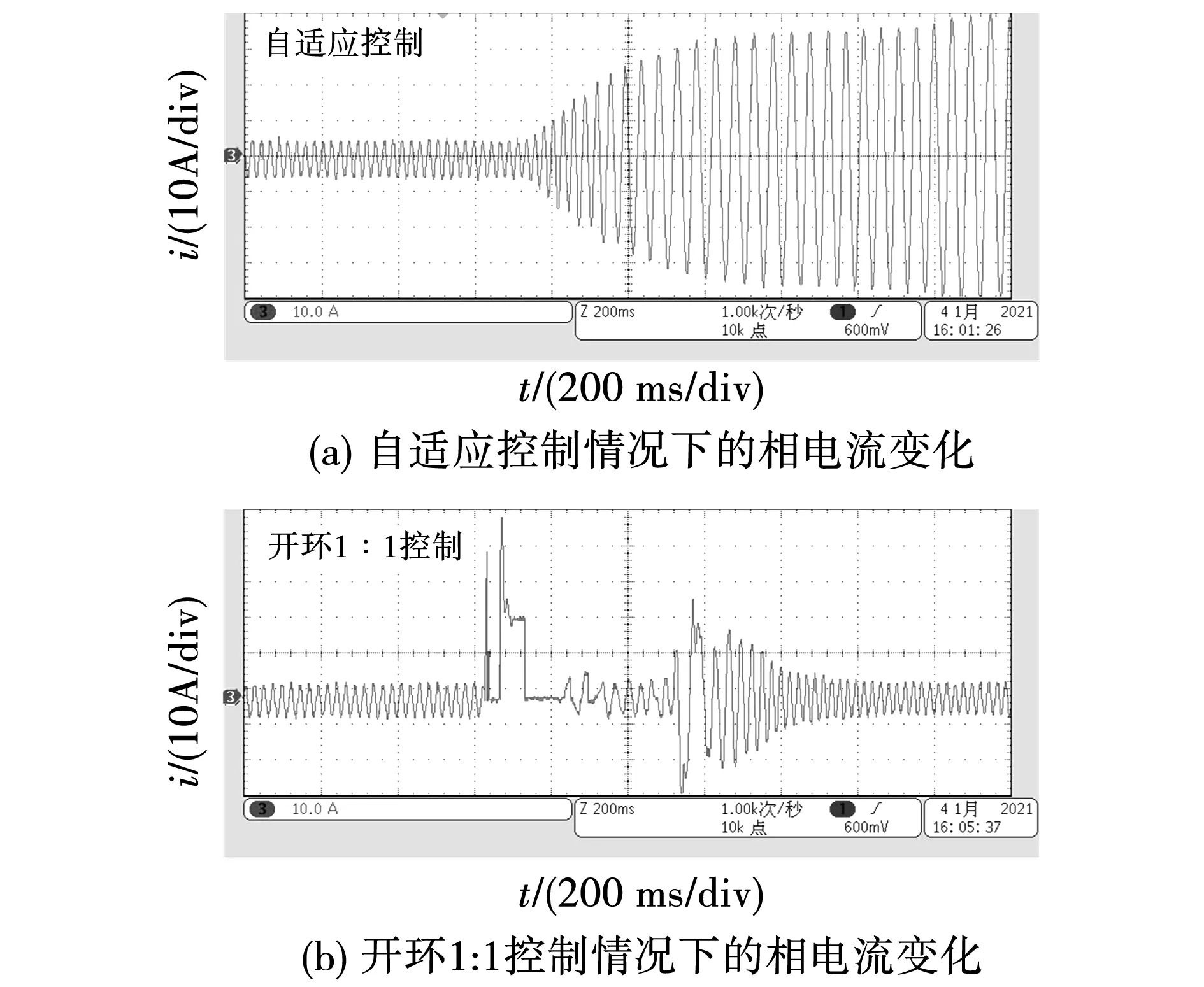
图18 相电流对比图
由以上曲线分析可知,使用自适应控制算法可以显著提升电动助力车的助力效果,在载重变化和坡度变化时,与传统开环1∶1控制算法相比,助力车的起步速度和上坡能力都有较大的提高,证明了自适应控制算法的有效性,与文献[7]和文献[9]相比,由于模型简单,在力的跟随性方面得到优化,体现在起步、上坡时候力的及时性传导,对踩踏力响应变快,且该自适应算法对电机控制器主控芯片的资源占用较少,对芯片算力要求较低,有效降低了控制器成本,在实车路况实验中系统运行稳定,符合预期效果。
4 结 论
针对当前电动助力车助力系统的要求,本文提出了一种基于模型参考自适应的电助力单车扭矩控制策略。
1)使用Lyapunov第二法推导出系统的自适应率和控制率,保证了系统的全局稳定性,无需单独证明系统稳定状态;并使用MATLAB在电动助力车仿真模型中进行验证,结果证明在车辆负载变化或者道路坡度变化情况下,自适应算法为可以为电动助力车提供有效的助力扭矩。
2)通过实车路况测试,对比自适应控制算法和开环1∶1控制算法的实际骑行效果,对比结果证明自适应控制算法在电动助力车起步速度和上坡能力等方面都有显著提高,且系统运行稳定可靠。