梯形波电流注入法的IPMSM多参数在线辨识
2022-06-23杨公德王朋刘宝谨
杨公德, 王朋, 刘宝谨
(1.福州大学 电气工程及其自动化学院,福建 福州 350108; 2.谢菲尔德大学 电子电气工程学院,谢菲尔德 S10 2TN)
0 引 言
内嵌式永磁同步电动机(inner permanent magnet synchronous motors,IPMSM)具有结构简单、功率密度大和运行效率高等优点,广泛应用于伺服系统、电动汽车及电动船舶等领域[1]。但受到温度和磁路饱和影响,IPMSM的定子电阻、直轴电感、交轴电感和转子永磁磁链将发生变化。这些电气参数变化将严重影响IPMSM的无位置传感器控制、解耦控制及自适应控制的控制性能,甚至危及控制系统稳定性[2-4]。因此,获得精确的电气参数是实现IPMSM高性能控制的关键。
目前,IPMSM电气参数获取方式包括离线参数辨识和在线参数辨识两类。由于离线参数辨识只能辨识电动机在非运行状态下的电气参数,无法满足电动机的高性能运行要求,其应用场合受到限制。在线参数辨识可实时辨识电动机电气参数,受到越来越多研究者的关注。根据IPMSM在同步旋转坐标系下的电压方程可知,电动机有定子电阻,转子永磁磁链,直轴电感和交轴电感共4个电气参数,但仅有两个约束条件。因此,IPMSM的电压方程是一个秩为2的方程。根据系统辨识理论,待辨识参数多于模型秩数将造成方程欠秩[5-6],无法保证辨识参数收敛到实际值。因此,仅依据辨识模型的一组输入输出量,无法保证辨识结果收敛于模型参数实际值。MOREAU S使用欠秩模型进行电动机参数的在线辨识,定子电阻额定值为7.5 Ω,辨识值为6.30 Ω,定子电阻的辨识值和额定值间的误差较大[7]。在假定转子永磁磁链已知条件下,LIU L等人采用李雅普诺夫稳定性算法在线辨识定子电阻和电感[8]。辨识过程忽略了IPMSM运行过程中直轴电感、交轴电感和转子永磁磁链变化对定子电阻辨识精度的影响。对于大功率IPMSM,由于受到功率密度及效率的限制,定子电阻一般较小,在中高速范围内,定子电阻压降在整个电压方程中的权重较小。此外,定子电压也受电压和电流空间谐波影响。这些因素均对基于IPMSM动态电压方程的定子电阻辨识精度产生较大影响。为此,研究者通过增加约束条件来增加IPMSM辨识模型的秩以提高在线参数辨识精度。浙江大学黄进等人利用谐波反电势增加一个一个辨识方程,无需注入扰动信号,便可多辨识一个参数[9]。IPMSM的电磁转矩方程包含了电机的交直轴电感和转子永磁磁链参数,SENJYU T等人在IPMSM转速稳定后将电磁转矩方程作为一个辨识方程,结合电动机的直轴电压和交轴电压方程,模型方程的秩数为3,可实现电动机的3个参数在线辨识[10]。
本文提出一种梯形波电流注入的IPMSM多参数在线辨识方法。采用遗忘因子递推最小二乘算法(forgetting factor recursive least square,FFRLS),辨识IPMSM的定子电阻、直轴电感、交轴电感和转子永磁磁链,解决4个参数同时在线辨识所存在的欠秩问题,并且梯形波电流注入法减小电动机的转矩脉动。为实现辨识参数的快速和准确的收敛,研究持续激(persistence of excitation,PE)条件。在两相同步旋转坐标系中对逆变器的非线性进行建模分析,减小逆变器的非线性对IPMSM参数辨识精度的影响。仿真和实验结果证明所提出的多参数在线辨识方法的有效性。
1 IPMSM多参数在线辨识模型
1.1 IPMSM数学模型
假设IPMSM磁路不饱和,气隙磁场呈正弦波分布,不计磁滞和涡流损耗,IPMSM在两相旋转坐标系下的电压和电磁转矩方程[11-13]为:
(1)
式中:pn是极对数;Te是电磁转矩;R是定子电阻;ψm转子永磁磁链;Lq和Ld分别是交轴电感和直轴电感;p是拉普拉斯算子;ω是电角速度;iq和id分别是交轴电流和直轴电流;uq和ud分别是交轴电压和直轴电压。
基于IPMSM的稳态离散模型辨识电动机的参数[14],式(1)简化为:
(2)
由式(2)可知,两个电压方程中存在为R、ψm、Lq和Ld共4个未知参数,方程存在欠秩问题,无法保证辨识参数收敛到实际值。
1.2 逆变器非线性分析
IPMSM多参数在线辨识主电路采用三相逆变器。由于受到死区时间设置,功率器件开通、关断的延迟时间和功率器件饱和压降、体二极管导通压降等因素影响,逆变器输出电压将产生一定误差。现有方法将给定电压代替实际电压,忽略了逆变器非线性影响,导致IPMSM参数辨识产生误差。
在两相同步旋转坐标系下,直轴电压误差ud_err和交轴电压误差uq_err为
(3)
式中:Dd和Dq为直轴电压和交轴电压死区畸变系数;θe为转子电角位置;Vdead为输出电压误差,定义为
其中:Ton和Toff分别为功率器件的开通和关断时间;Vsat和Vd分别为功率器件和二极管的正向导通压降;Vdc为测量的直流母线电压;Kτ(θ)为
电动机稳态运行时,输出电压误差Vdead可认为是恒定的。在不同的内功率因数角γ下,图1为Dd和Dq的波形。由图1可见,死区时间设置导致直轴和交轴电压出现了六倍基频脉动,影响IPMSM参数辨识精确度。
1.3 基于FFRLS的在线参数辨识设计
考虑逆变器非线性影响,式(2)进一步表示为
(4)
注入的梯形波电流会引起直轴电感和交轴电感变化,注入K个梯形波电流,直轴电压和交轴电压方程为
(5)
式中,i=1, 2, ……,K。
在IPMSM进入稳定状态时注入梯形波电流。在200 ms内有序注入两个梯形波电流,电流控制器的响应时间设计为小于10 ms,测量数据的采集延迟10 ms。在100 ms内,认为R和ψm恒定,但是交、直轴电感会随着交、直轴电流而变化。由于注入的梯形波幅度较小,交轴电流基本保持恒定,直轴电感的变化主要受直轴电流的影响,即忽略交叉饱和效应,优化后的电感模型为:
(6)
式中:Ld0和Lq0为离线的直轴电感和交轴电感;Ad和Aq为直轴磁路和交轴磁路饱和系数。
将式(6)代入式(5)得:
(7)
由式(1)中的电磁转矩和式(5)得
(8)
式中Tei为第i个梯形波电流时的电磁转矩。
注入的梯形波电流可以在较短的时间内完成,比机械系统的响应速度快得多。因此,在梯形波电流注入期间可认为负载转矩一定,即为
Tei=Tej,0≤i,j≤K,i≠j。
(9)
结合式(8)和式(9)可得R和Vdead的辨识模型为
ωjAi-ωiAj=R(ωjBi-ωiBj)-Vdead(ωjCi-ωiCj)。
(10)
式中Ai、Aj、Bi、Bj、Ci和Cj为:
(11)
(12)
(13)
(14)
(15)
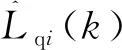
根据上述推导待辨识参数的矩阵,本文提出的梯形波电流注入的IPMSM多参数在线辨识方法如图2所示。
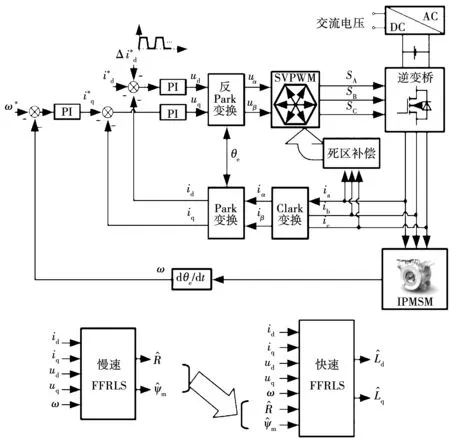
图2 梯形波电流注入的IPMSM多参数在线辨识方法
图3表示梯形波电流注入策略,提出的梯形波电流注入法可以在200 ms内完成。在IPMSM进入稳定状态时注入梯形波电流。在 200 ms内注入两个梯形波电流,电流调节器的响应时间设计为小于10 ms,测量数据的采集延迟10 ms。
经紫外可见分光光度法扫描发现,2种溶液于350 nm处出现最大吸收。因此,确定试验测定波长为350 nm。
图3 梯形波电流注入策略
本文采用快速FFRLS算法估计IPMSM的电感,采用慢速FFRLS算法估计IPMSM的定子电阻和转子永磁磁链。在梯形波电流注入的一个周期内,假设定子电阻和转子永磁磁链保持恒定,快速FFRLS算法以电流采样速率辨识交轴电感和直轴电感。慢速FFRLS算法以速度环的执行频率辨识定子电阻和转子永磁磁链。
快速FFRLS算法辨识电感的矩阵为:
(16)
慢速FFRLS算法辨识定子电阻和转子永磁磁链的矩阵为:
(17)
1.4 基于FFRLS的在线参数辨识持续激励条件

为实现待辨识参数收敛的快速性和准确性,Φ必须要满足PE条件
(18)
在离散控制系统中,式(17)可表示为
(19)
(20)
如果P是有界的,Φ将满足PE条件,并且P的有界条件可在软件代码中实现。因此,根据式(20),Φ满足PE条件为
(21)
2 仿真和实验研究
本文仿真和实验用的电流环执行频率为16 kHz,速度环执行频率为2 kHz,注入的梯形波电流频率为10 Hz。表1为仿真和实验用IPMSM主要参数。
表1 IPMSM主要参数
2.1 仿真研究
基于图2,在MATLAB/Simulink中搭建了采用梯形波电流注入的IPMSM参数在线辨识仿真模型。该仿真模型求解器设置为定步长类型,求解算法采用龙格库塔算法,仿真时间设置为5 s。交轴电流环的调节器参数为:Kpq=Lq×1 100,Kiq=R×1 100,直轴电流环的调节器参数为:Kpd=Ld×1 100,Kid=R×1 100,速度环调节器参数为Kps= 0.14,Kis=7。
采用本文提出的梯形波电流注入的IPMSM多参数在线辨识方法,图4为辨识的IPMSM定子电阻、转子永磁磁链、直轴电感和交轴电感值。由图4(a)和图4(b)可知,慢速FFRLS算法辨识的定子电阻误差为7%,转子永磁磁链误差为0.5%。由于定子电阻压降在电压方程中占比较大,采样和测量误差造成的定子电阻辨识值误差偏大。0.35 s后,慢速FFRLS算法进入稳定,将定子电阻和转子永磁磁链的辨识值作为快速FFRLS算法输入值,辨识IPMSM的直轴电感和交轴电感。由图4(c)和图4(d)可知,0.5 s后启动快速FFRLS算法,该算法迅速收敛到稳定值。采用快速FFRLS算法辨识的直轴电感误差为5%,交轴电感误差为3%,直轴电感和交轴电感辨识误差在可接受的范围内。
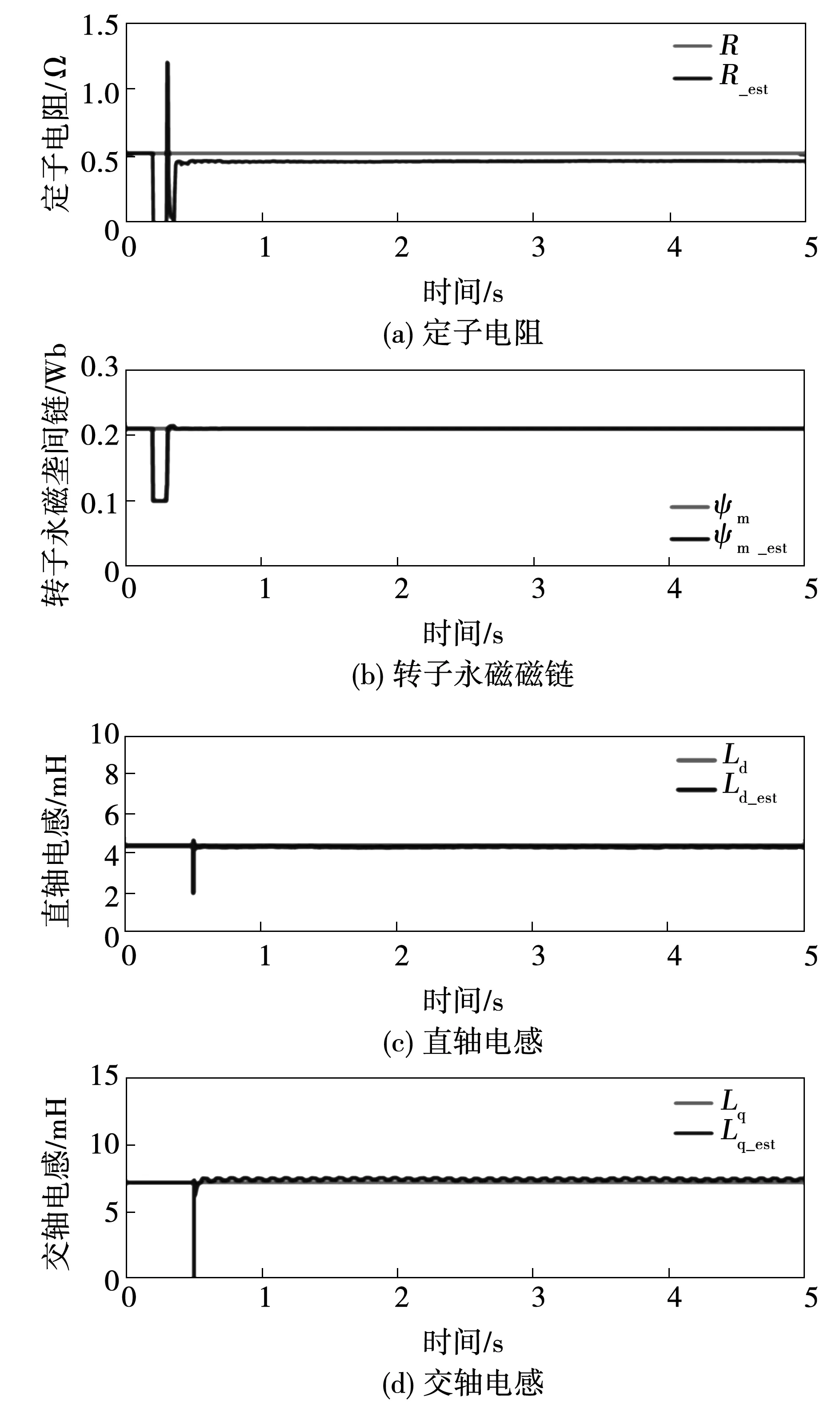
图4 基于所提出算法的IPMSM多参数辨识仿真结果
注入直轴的方波电流和梯形波电流如图5所示,其中两种电流幅值为2 A。由于注入的梯形波电流没有阶跃过程,相比于方波电流注入法,如图6所示,IPMSM的转矩脉动相对较低。
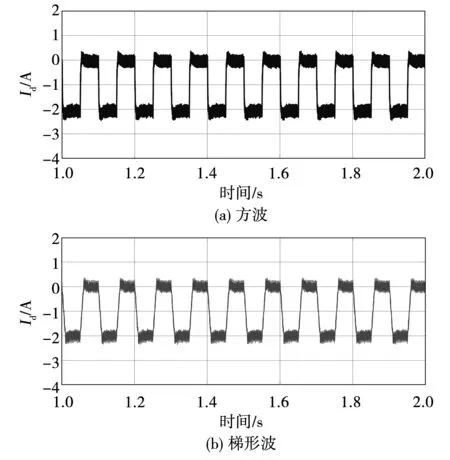
图5 直轴电流注入类型
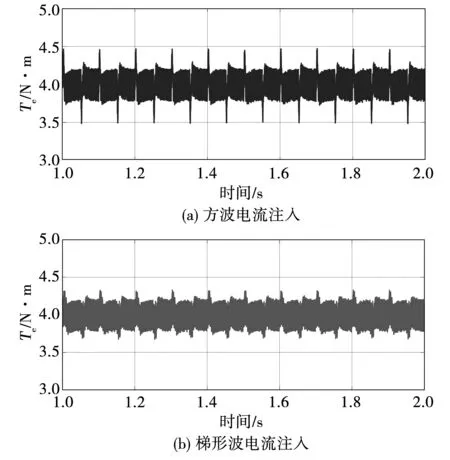
图6 不同直轴电流注入的IPMSM的转矩波形
2.2 实验研究
基于ST公司开发的STM32F4单片机,搭建了如图7所示的系统实验平台,以验证本文所提出的梯形波电流注入的IPMSM多参数在线辨识方法的正确性和有效性。平台主要由驱动器、测试用伺服电机、负载用直流电机、控制器以及扭矩传感器等部分组成,其中伺服电机参数详见表1。
基于图7所示的系统实验平台,采用本文所提出的梯形波电流注入的IPMSM多参数在线辨识方法,图8为辨识的IPMSM定子电阻、转子永磁磁链、直轴电感和交轴电感。由图8(a)和图8(b)可知,慢速FFRLS算法辨识的定子电阻误差为7%,转子永磁磁链误差为0.5%。慢速FFRLS算法稳定后,将定子电阻和转子永磁磁链辨识值作为快速FFRLS算法的输入值,辨识直轴电感和交轴电感值。由图8(c)和图8(d)可知,1.5s后启动快速FFRLS算法,辨识的直轴电感误差为5%,交轴电感误差为3%,辨识误差在可接受的范围内。
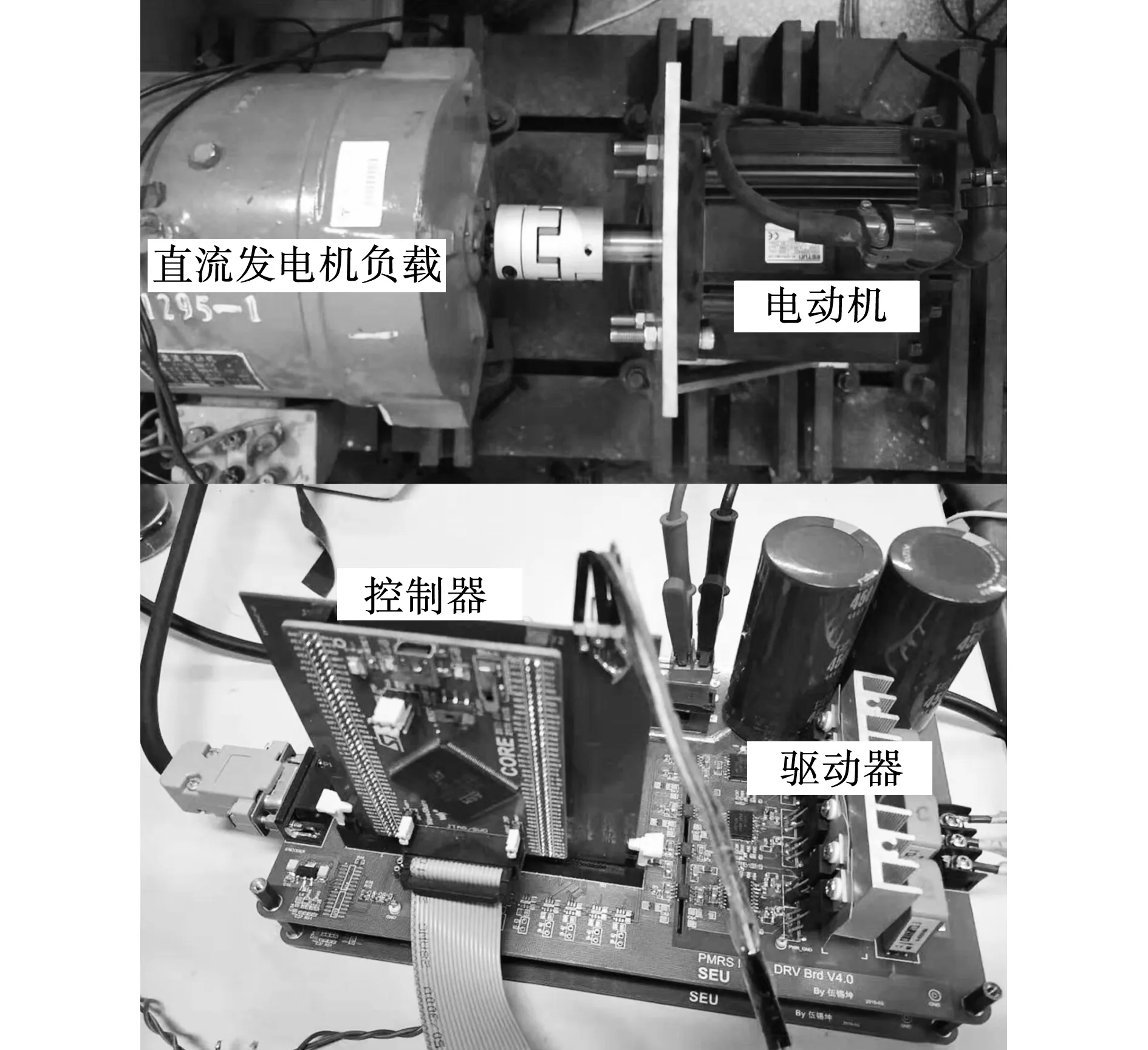
图7 系统实验平台
采用慢速FFRLS算法也可用于辨识直轴电感和交轴电感,辨识结果如图9所示。但慢速FFRLS算法辨识的直轴电感和交轴电感波动大、收敛速度慢。因此,不宜采用慢速FFRLS算法辨识直轴电感和交轴电感。
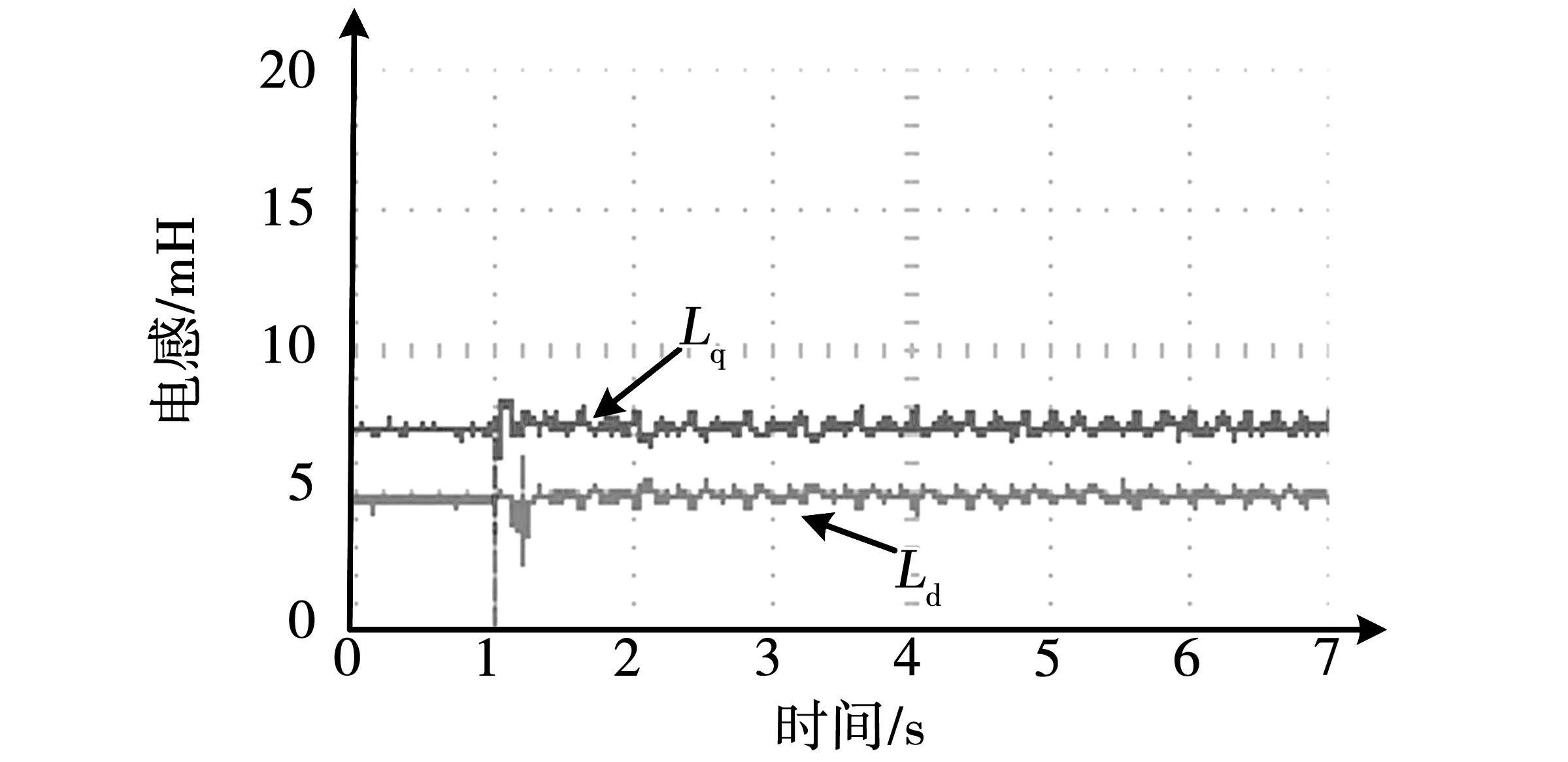
图9 基于慢速FFRLS算法的直轴电感和交轴电感辨识实验结果
3 结 论
本文在IPMSM数学模型的基础上,提出了梯形波电流注入的IPMSM多参数在线辨识方法,实现IPMSM的定子电阻、转子永磁磁链、直轴电感和交轴电感的在线辨识,而且辨识结果接近电动机的实际参数。在两相同步旋转坐标系下对逆变器的非线性特性进行建模,分析逆变器非线性导致的直轴电压和交轴电压的畸变量分别为6次谐波脉动。梯形波电流注入的IPMSM多参数在线辨识方法可推广应用于IPMSM 的无位置传感器控制、解耦控制及自适应控制中。