一种磁链重构的双三相PMSM分布参数建模方法
2022-06-23钟再敏任举尹星
钟再敏, 任举, 尹星
(同济大学 汽车学院,上海 201804)
0 引 言
近几年来,具有效率高、转矩密度大且脉动低等优点的多相电机在各个领域受到了广泛的关注[1-2]。双三相永磁同步电机(permanent magnet synchronous motor,PMSM)是一种非对称六相电机,其不仅具有多相电机的众多优势,同时兼具PMSM稳定可靠、调速范围宽等优点,因此被大量应用到低压大功率驱动场合,其中最具代表的就是电动车辆和混合动力车辆的电驱动系统[3-5]。
然而,双三相PMSM在实际运行过程中受气隙磁场非正弦、磁饱和等非线性因素的影响,尤其是两套三相绕组之间的耦合互感不能被忽略,导致反电动势中含有空间谐波,进而引起相电流中含有较高的5、7次电流谐波[6]。这些电流谐波会增大系统的损耗,影响双三相PMSM的实际性能,因此需要针对双三相PMSM的谐波分析及抑制问题进行重点研究。传统的PMSM数学模型是基于集中式参数建立的,这种建模方法需要众多假设前提,与电机实际运行状态存在较大差异,难以反映出真实电机运行过程中的非线性特性和谐波特性,也无法实现对电机的准确控制。
为实现对电机空间谐波特性的准确描述,Zhong Zaimin等学者提出了“分布参数建模”方法,通过基于磁共能重构的数值解析方法来重建有限元分析(finite element analysis, FEA)的仿真结果,获得了三相PMSM的分布参数数学模型,根据仿真和实验证明了所获得的数学模型可以准确地描述电机的磁饱和情况和空间谐波特性[7-8]。分布参数建模方法的本质是将磁场非正弦和饱和引起的空间变化特性用统一的数学模型加以解析化描述[9]。本文将分布参数建模思想推广应用到双三相PMSM的建模中。
首先,本文利用有限元数值分析法分析双三相PMSM的空间谐波特性并获得磁链的数值解,根据磁链的周期性特性,利用傅里叶级数展开及多项式拟合,获得能准确描述磁链变化的数值解析模型。结合虚位移原理,得到双三相PMSM分布参数模型中的转矩模型及电压方程,并将分布参数建模结果与FEA仿真结果进行对比验证。最后,搭建基于分布参数模型的双三相PMSM矢量控制仿真系统,复现双三相PMSM在实际控制中的电流谐波特性。
1 传统集中式参数的数学模型
双三相PMSM的结构如图1所示,其定子由两套在空间位置上互差30°电角度的三相绕组(ABC绕组、XYZ绕组)组成,绕组均使用星型连接,并采用隔离中性点的方式[10]。
由于实际电机运行过程较为复杂,在建立集中参数数学模型之前,需要对双三相PMSM做出如下假设前提:转子永磁体产生正弦分布的磁场;忽略定子齿槽对磁场分布的影响;不考虑永磁体的磁饱和;稳态运行时绕组中的感应电动势为正弦波,同时忽略空间谐波对磁场的影响[11]。
基于上述假设,建立电机的集中参数数学模型。对双三相PMSM而言,传统基于集中式参数的建模方法可以分为基于双dq变换方法和基于矢量空间解耦方法(vector space decomposition,VSD)[12-14]。基于双dq变换的建模方法是利用传统三相电机建模中的双反应理论,对两套三相绕组分别进行坐标变换,最终得到两个三相之间存在耦合的数学模型[15],其坐标关系如图2所示。其中d1q1、d2q2轴在空间位置上重合,d1q1轴为ABC绕组对应的同步旋转坐标系,d2q2为XYZ绕组对应的同步旋转坐标系。
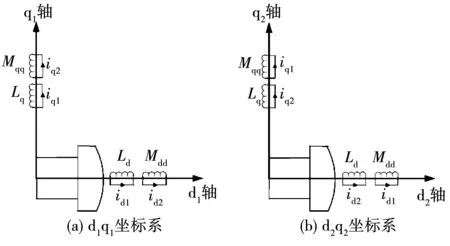
图2 双dq变换的坐标系
基于VSD的建模思路则是通过将电机的各变量分别映射到与机电能量转换有关的D1Q1子空间和与机电能量转换无关的D2Q2子空间中,最终获得解耦形式的数学模型[16]。图3为VSD变换的坐标系,其中,D1轴与永磁体轴线保持一致,Q1轴空间上超前D1轴90°,电机各变量的基波和12n±1次谐波被映射到D1Q1子空间中。D2Q2轴为谐波子空间,电机各变量的6n±1次谐波被映射到D2Q2子空间中。
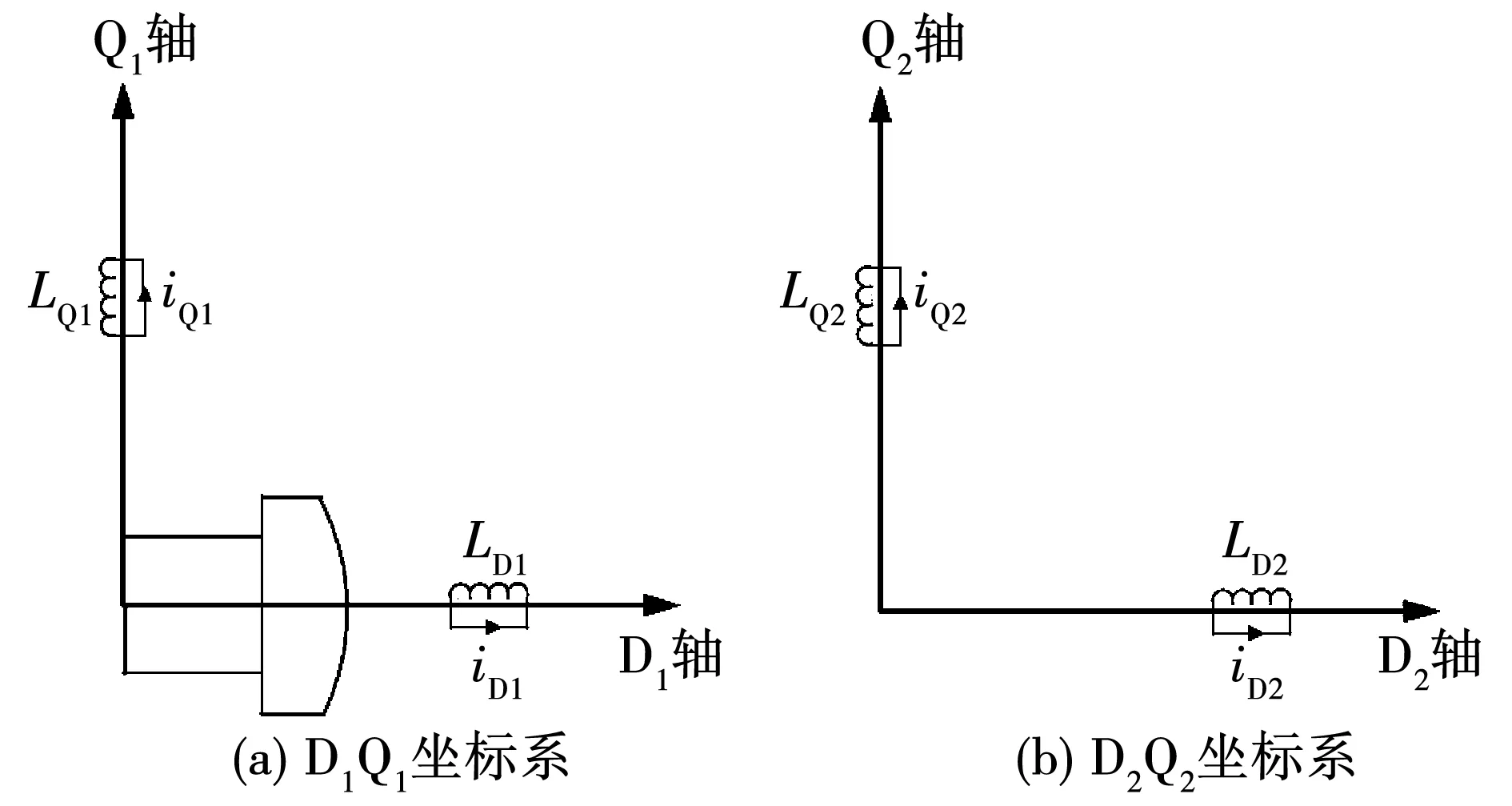
图3 VSD变换的坐标系
基于双dq变换和基于VSD的建模方法本质上只是坐标变换方法的不同,使得最终控制的电流分量不同,在实际应用过程中可以针对不同的需求进行选择。由于双dq变换坐标系的物理意义相较于VSD变换方法更加明确。因此在后续建模分析过程中通过坐标变换将静止坐标系下的电磁参数变换到图2的双dq同步坐标系下,从而可以更加明显看出电磁参数的空间谐波分布情况。而基于VSD的建模方法相较于双dq变换方法解耦更加完全,且VSD控制结构可以对D2Q2轴的谐波电流进行独立控制,其灵活度优于采用双dq变换的矢量控制,因此,后续在控制方案上统一采用基于VSD的矢量控制结构。
然而,上述的双三相PMSM集中参数建模方法都是在众多假设前提下建立的,在双三相PMSM的实际应用场景中为提高功率密度,电机铁心一般工作在磁饱和状态,电机气隙磁场难以保证完全正弦分布。由于这些非理想因素的影响,随着转子位置的变化,电机的实际参数中必定包含空间谐波,因此以集中式参数建立的双三相PMSM的数学模型无法准确描述电机实际运行过程中的空间谐波及饱和特性。
2 基于磁链重构的分布参数模型
为了能够对电机实际运行过程中的磁饱和情况和空间谐波特性进行准确描述,考虑通过分布参数建模的方法建立电机的数学模型。首先通过FEA仿真获取磁链的数值解,在此基础上获得磁链的解析模型并得到基于分布参数的电压方程和电磁转矩模型。
2.1 FEA模型建立及数值解获取
FEA仿真可以真实的模拟实际电机的磁饱和、齿槽影响、以及各相绕组之间的耦合情况,获得电机各个电磁参数随转子位置变化的分布波形。为了分析双三相PMSM真实的空间谐波特性和非线性因素对电机的影响,采用某款车用双三相PMSM为研究对象并建立如图4的FEA仿真模型,其参数如表1所示。
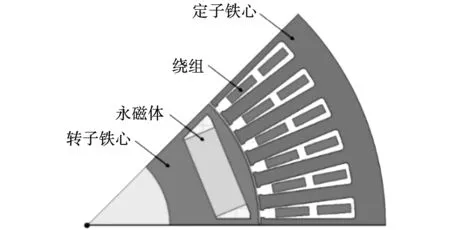
图4 双三相PMSM的二维FEA模型(1/8)
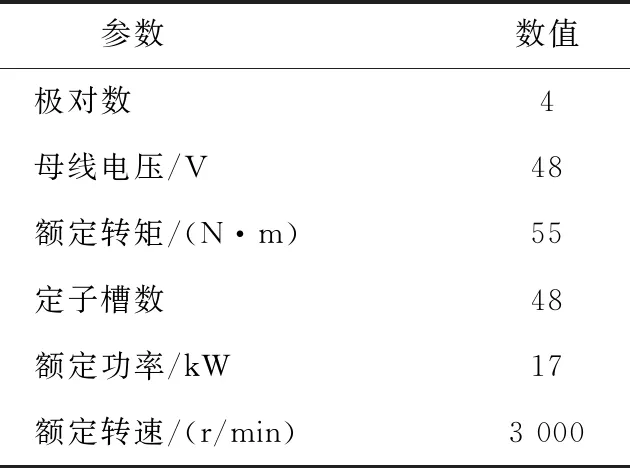
表1 双三相PMSM有限元模型主要参数
考虑到实际的双三相PMSM由于定子结构、磁饱和、漏磁所引起的非线性特性影响因素,磁链的变化往往比较复杂,综合分析实际的影响因素,可以将磁链表示成
ψs=f(Is1,β1,Is2,β2,θr)。
(1)
式中:Is1为ABC三相电流幅值;β1为ABC三相定子电流矢量与d轴的夹角,即转矩角;Is2为XYZ三相电流幅值;β2为XYZ三相定子电流矢量与d轴的夹角;θr为转子位置角(见图1)。当励磁电流采用正弦电流激励时,相应的工作点由(Is1,β1,Is2,β2)确定。
由图2的双dq变换坐标系可知,d1q1对应第一套ABC三相绕组,d2q2对应第二套XYZ三相绕组,通过将六相静止坐标系下的电磁参数变换到双dq同步坐标系下来观察电磁参数的空间谐波分布情况。图5和图6显示了Is1=Is2=108 A,β1=β2=120°工况下仿真得到的双三相PMSM的磁链和转矩FEA结果。图中ψd1、ψq1为ABC三相磁链在转子dq轴坐标的投影,ψd2,ψq2为XYZ三相磁链在转子dq轴坐标的投影。
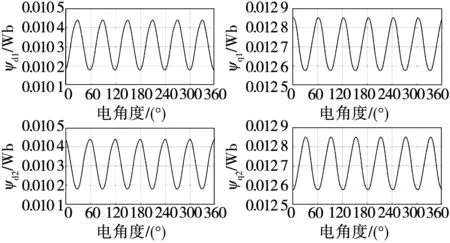
图5 工况点(108 A,120°,108 A,120°)仿真的磁链数值解
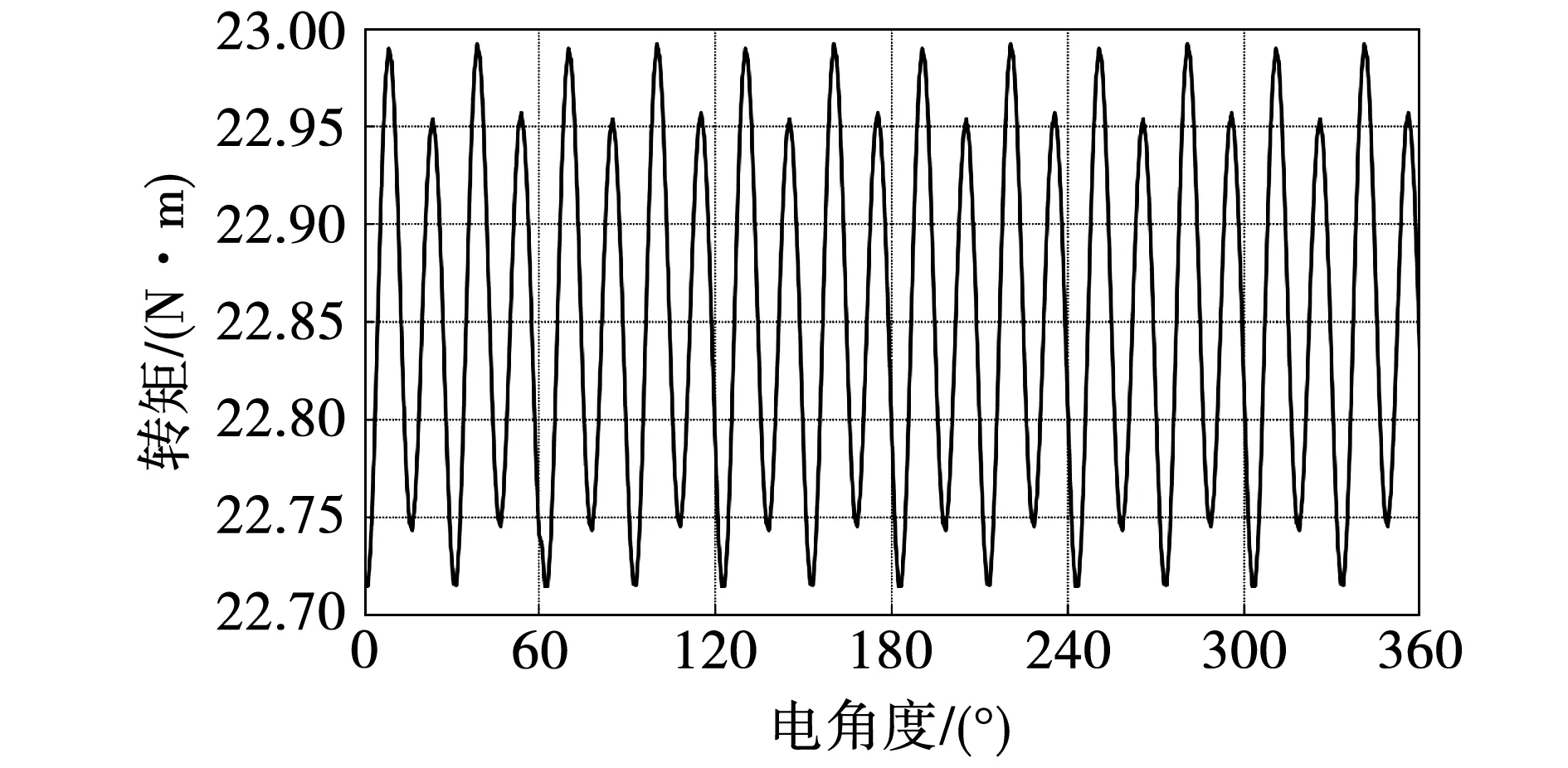
图6 工况点(108 A,120°,108 A,120°)仿真转矩
从图5的仿真结果可以看出,磁链随着转子位置呈周期性分布,其周期为π/3。图6双三相PMSM的电磁转矩存在12、24次转矩脉动,但整体的转矩脉动幅值不大,最大仅为0.3 N·m,这也说明了双三相PMSM较传统三相PMSM的一个显著的优势就是其转矩脉动小。
根据磁链与工况点的关系,为方便后续的建模,将磁链表达式的参考系由极坐标形式转化为直角坐标形式,则最终磁链的表达式为
ψs=f(Is1,β1,Is2,β2,θr)=
f(id1,iq1,id2,iq2,θr)。
(2)
式中:id1、iq1为ABC三相定子电流矢量在转子dq轴上的投影;id2、iq2为XYZ三相定子电流矢量在转子dq轴上的投影,自变量的对应关系为:
(3)
2.2 磁链解析模型
根据磁链在转子位置θr上的周期性,对所有工况点的磁链数据进行一维傅里叶级数展开。对于双三相PMSM系统而言,其能量主要集中在基频附近,因此傅里叶级数的阶次可以缩小到有限的阶次。以ψd1为例,展开的表达式为
(4)
式中:ak、bk为傅里叶级数的阶数k所对应的系数;N为傅里叶展开的最高阶次。
式(4)描述了磁链与转子位置的关系,但对于不同工况点,由于电流不同,磁链ψd1的值也会发生变化,为了获得磁链随电流大小的变化情况,采用将傅里叶系数描述成随电流变化的函数的方法,如下所示:
(5)
式中:Ak,Bk(k=0,1,…,N)为1×15的行向量,可通过使用最小二乘法获得。并且考虑到双三相PMSM两套三相绕组之间的耦合以及磁饱和情况,选择电流基函数为
(6)
为了简化整个磁链解析表达式,将各向量用矩阵的形式表示为:
(7)
最终,d1轴磁链随转子位置和电流变化的表达式为
(8)
同理,d2、q1、q2轴磁链也可通过上述方法进行处理:
(9)
式中:Ax、Bx(x=d1,q1,d2,q2)为根据FEA结果(Ak,Bk)计算得到的维度为(N+1)×15的系数矩阵。每个磁链表达式均由三部分组成,表达式充分考虑了磁链随转子位置以及电流大小的变化情况。
为了验证所建立的磁链解析表达式的准确性,在相同工况点下对重构的磁链模型与FEA仿真所得结果进行对比。考虑到复杂性与精确性之间的平衡,在所构建的磁链重构模型中,傅里叶级数系数为6,即N=6。图7、图8显示了在某两个工况点下,磁链解析模型所得结果与FEA仿真结果的对比,为便于展示细节,鉴于磁链的周期性,在此采用六分之一电周期的磁链进行展示。从图中可以看出,所建立的磁链解析模型可以很好的描述磁链随转子位置的变化情况,同时与FEA所得结果有高度的一致性,验证了所建立的磁链解析模型的准确性。
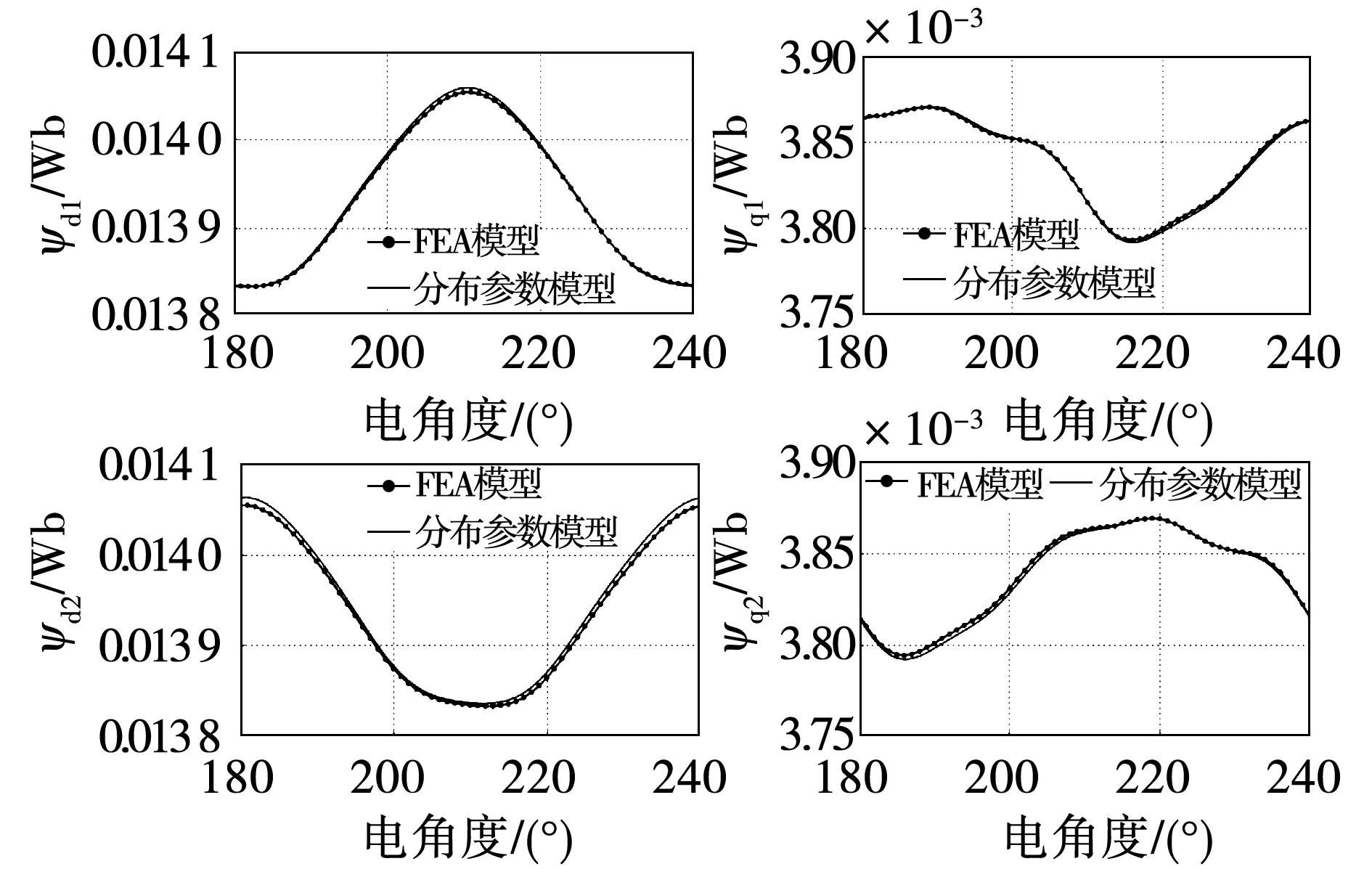
图7 磁链解析模型与FEA结果对比(27 A,100°,27 A,100°)
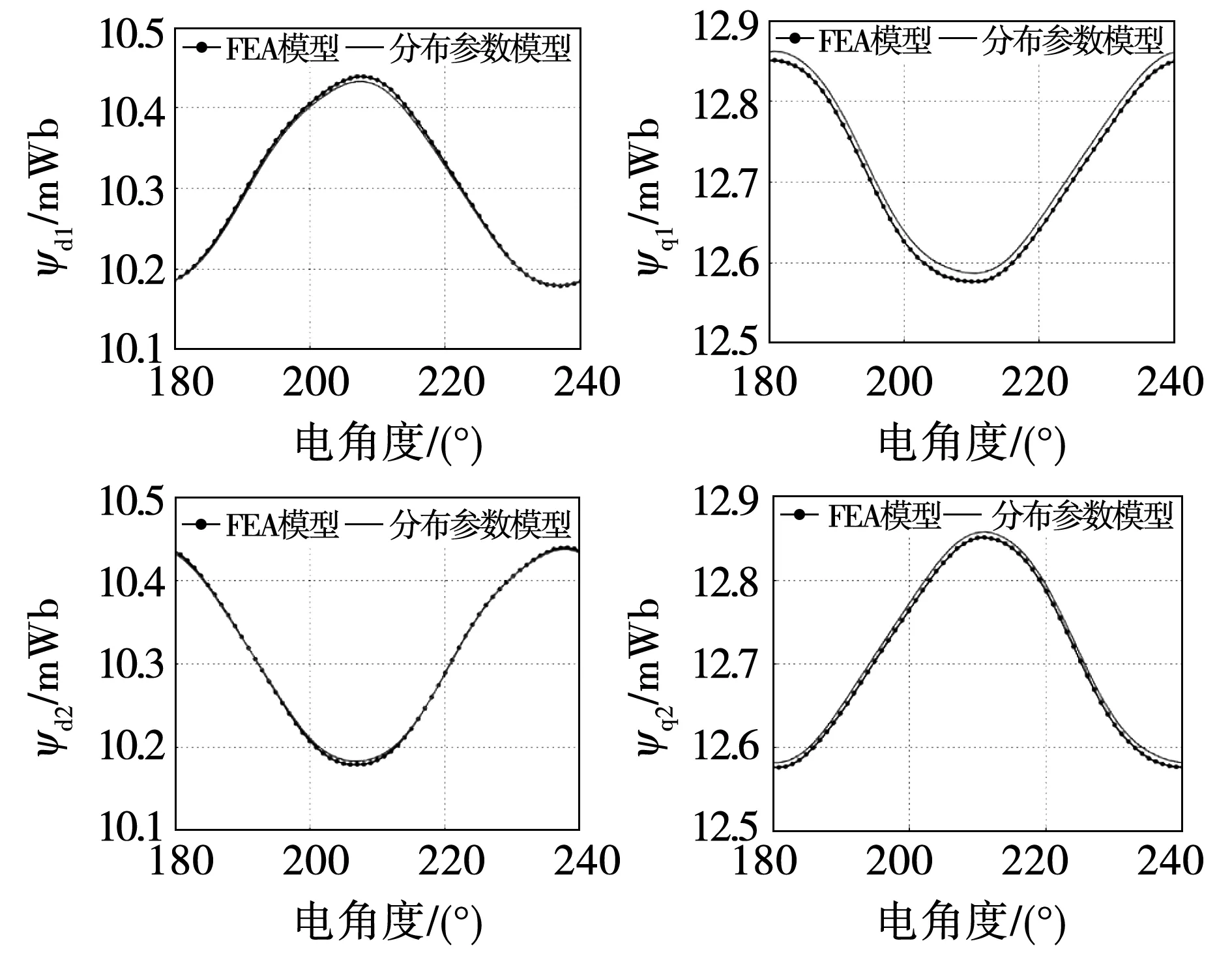
图8 磁链解析模型与FEA结果对比(108 A,120°,108 A,120°)
2.3 电压方程
根据磁链解析模型,可以推导出双三相PMSM的电压方程。在双dq坐标变换下,双三相PMSM的电压方程如下:
(10)
式中:ud1、uq1为ABC三相定子电压矢量在转子dq轴上的投影;ud2、uq2为XYZ三相定子电压矢量在转子dq轴上的投影;Rs为定子电阻;ωr为转子电角速度。该方程为双三相PMSM电压方程的一般表达形式,根据之前所建立的磁链解析模型,将磁链解析模代入电压方程,就能得到能描述空间谐波特性的电压解析方程,为简化表达,令
P=diag(0,1,…,k,…,N1,0,1,…,k,…,N1)。
则有电压方程为:
(11)
由式(11)可知,磁链直接体现在电压方程中,从而磁链谐波可以间接影响电流谐波。因此下文在仿真和实验的过程中通过电流谐波来直观地表现分布参数模型对电机谐波特性的准确描述以及谐波前馈抑制算法的有效性。
2.4 电磁转矩模型
为了得到电磁转矩的解析模型,需从能量传递角度出发,电磁转矩Te可以由磁共能对转子位置角求偏导获得
(12)
式中pn为极对数。磁共能Wc(id1,iq1,id2,iq2,θr)可以通过磁链对电流积分得到,即




(13)
令id1=d1iq1,id2=d2iq1,iq2=q2iq1,选择合适的积分路径,可得磁共能的解析表达式为
(14)
式中
根据虚位移原理,磁共能Wc(id1,iq1,id2,iq2,θr)对转子位置θr的偏导即为转矩,即
(15)
根据式(3),取id1,iq1,id2,iq2关于转子位置θr的偏导:
(16)
将式(16)代入式(14),可得电磁转矩的解析模型为

(17)
式(17)为最终的电磁转矩解析模型,该模型描述了转矩随不同电流,不同转子位置的变化情况。转矩公式由五部分组成,第一部分为磁共能对转子位置求偏导所产生的转矩脉动,主要包括齿槽转矩等,后四部分则为传统意义上磁链与电流作用生成的平均转矩,但因为此时磁链为重构的解析模型,故平均转矩也考虑了实际电机的空间谐波变化情况。
图9展示了不同工况点下建立的转矩解析模型与FEA模型的对比结果,可以看出转矩的解析模型可以很好的描述转矩随转子位置的空间谐波情况。
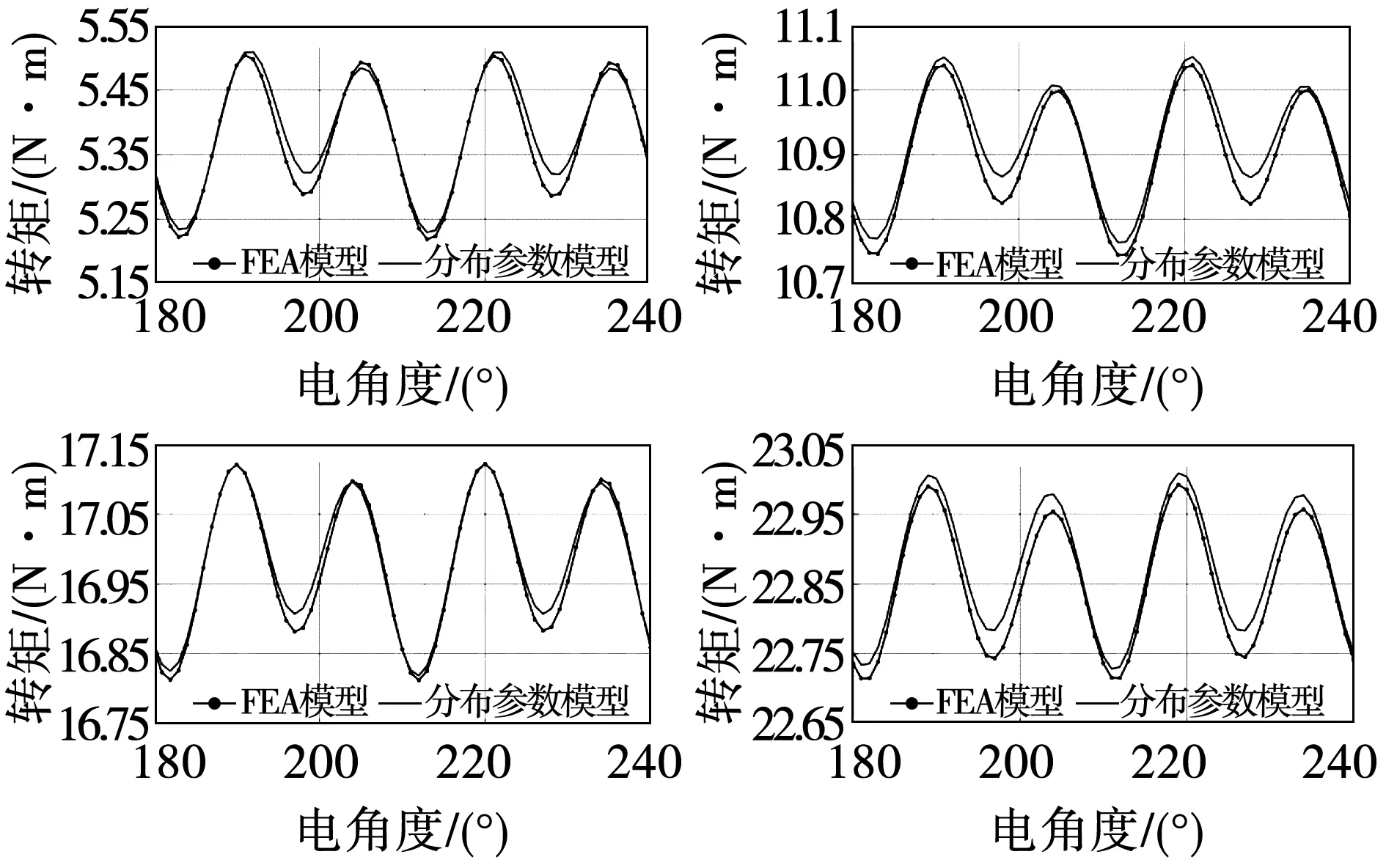
图9 电磁转矩解析模型与FEA结果对比
式(8)的磁链方程,式(11)的电压方程和式(17)的转矩方程表征了双三相PMSM的空间分布谐波特性,构成完整的分布参数模型,至此,实现了将三相PMSM分布参数建模思想拓展应用于双三相PMSM的建模。
3 仿真及实验分析
为了将上述不同建模方法的实现效果进行对比分析,建立了双三相PMSM的离线仿真系统。图10显示了VSD框架下的矢量控制框图,通过VSD变换将电机电磁参数变换到参与机电能量转换的D1Q1空间和不参与机电能量转换的D2Q2空间。控制系统采用4个电流环分别控制D1Q1、D2Q2轴电流,由于D2Q2轴电流主要为谐波电流,因此在实际控制中将D2Q2轴的电流设定值设为0。
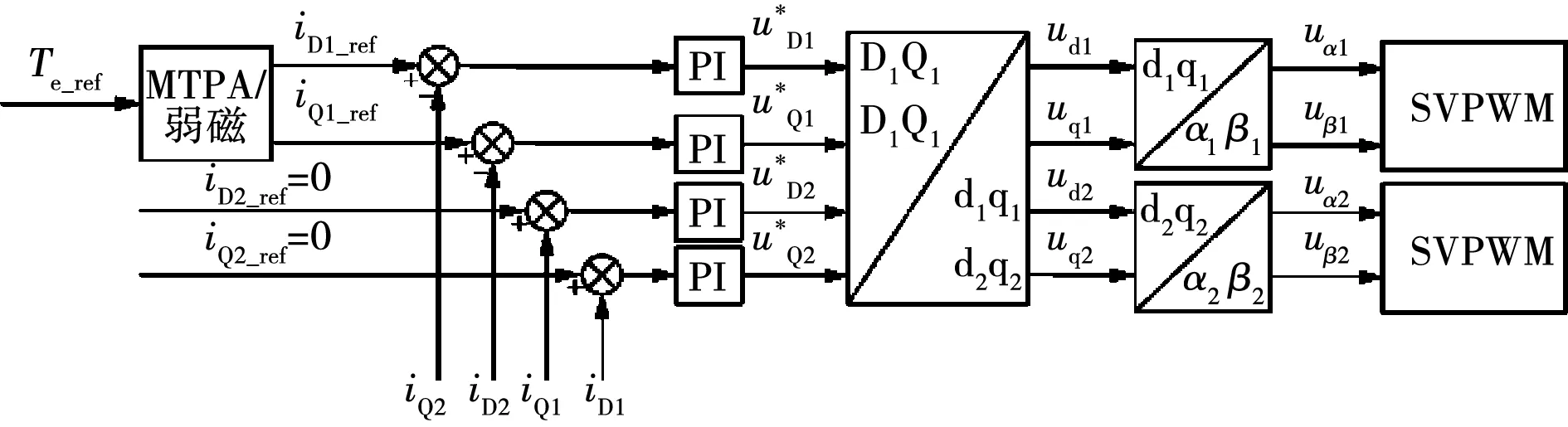
图10 基于VSD的双三相PMSM矢量控制框图
同时,为了调制的方便,采用两个独立的三相SVPWM调制器来实现双三相PMSM的调制,因此,需要将VSD形式下的电压矢量变换到双dq形式下,变换矩阵为
(18)
采用图10的控制框架在MATLAB/Simulink中建立整个控制系统的离线仿真程序,仿真模型使用如表1所示的电机参数。设置电机母线电压为48 V,FOC中电流环PI参数为:kp=0.03;ki=20;仿真基准步长为1e-7 s。下文中仿真和实验工况均为:电机转速为1 000 r·min-1;转矩为10 N·m。
3.1 基于集中参数数学模型的双三相PMSM仿真
图11为基于集中参数数学模型的仿真结果。从相电流波形可以看出,相电流波形的整体正弦度较好,基本无谐波电流,转矩波形也较平稳,无明显的转矩脉动。正如第一节中所述,基于集中参数建立的数学模型难以准确描述电机实际运行过程中的空间谐波及饱和特性。
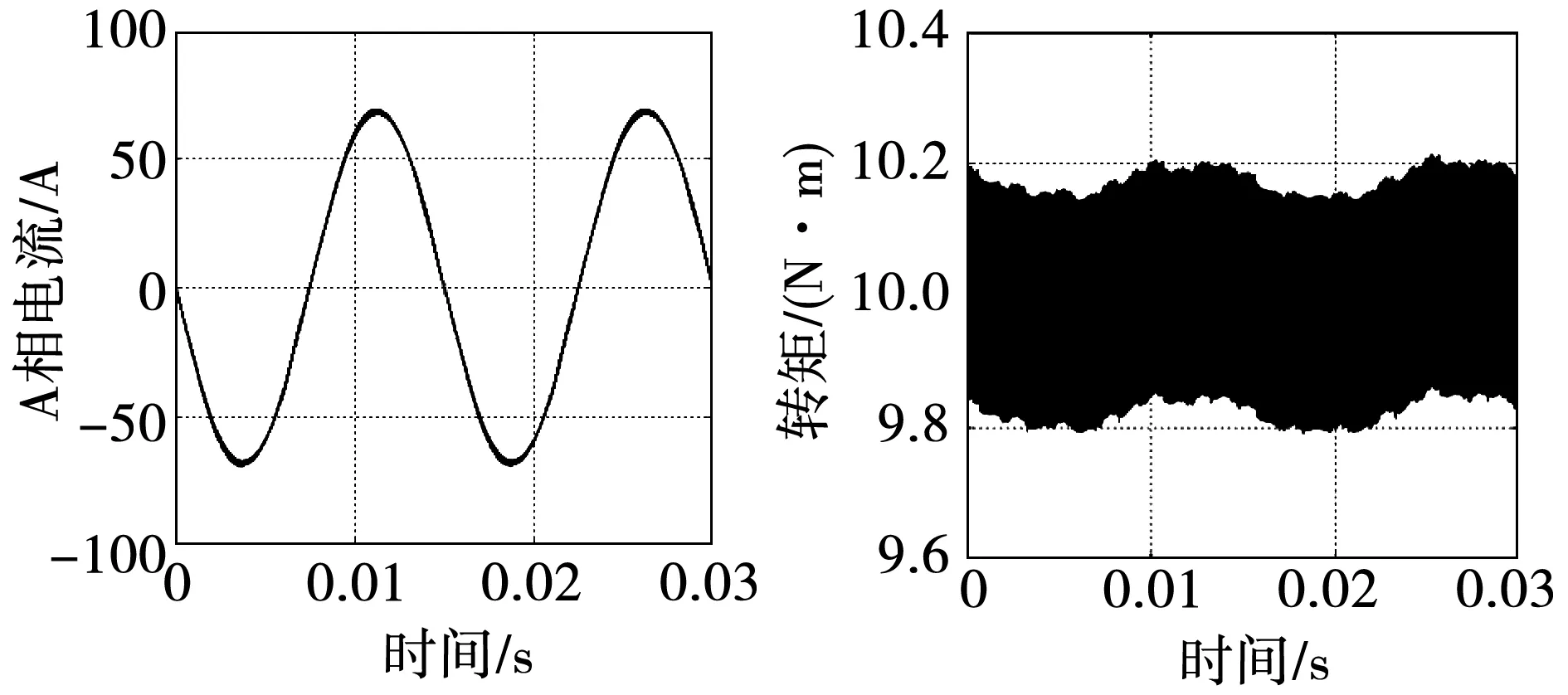
图11 基于集中参数数学模型仿真的电流和转矩波形
3.2 基于分布参数数学模型的双三相PMSM仿真
图12为基于分布参数数学模型的相电流仿真结果,对比图11可以看出,采用双三相PMSM的分布参数模型以后,相电流波形含有明显的5、7次电流谐波,反映了实际电机的空间谐波特性。图13为电磁转矩波形及其FFT分析,从FFT分析可以看出,一个电周期内转矩脉动以12、24次谐波为主,同时整体的转矩脉动较小,因此在实际控制中可以忽略转矩脉动的影响。
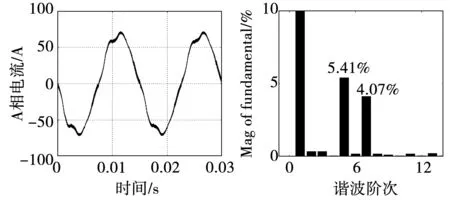
图12 基于分布参数数学模型仿真的电流波形和FFT分析
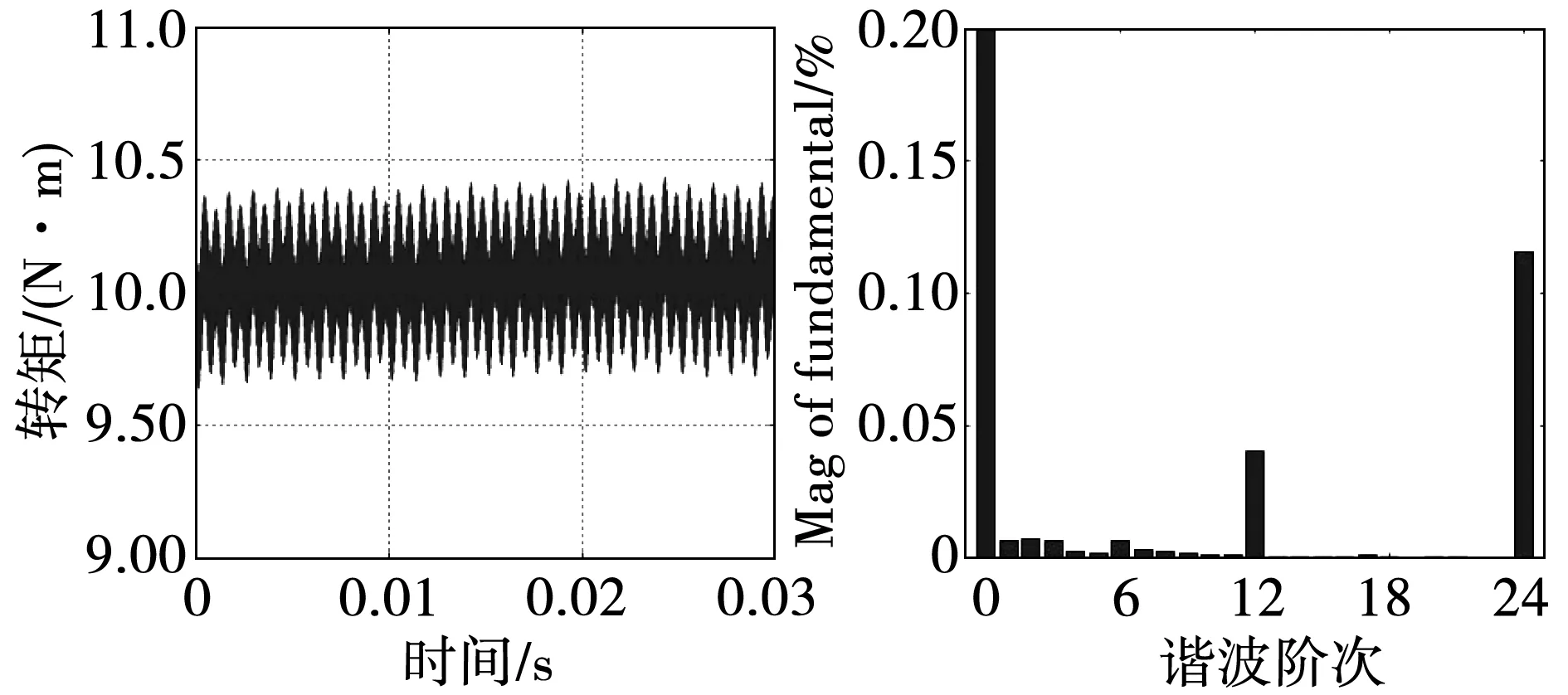
图13 基于分布参数数学模型仿真的转矩波形和FFT分析
3.3 实验结果
图14所示为双三相PMSM实验台架。实验电机参数与FEA模型一致(见表1)。逆变器以10 kHz的开关频率工作,死区时间为5 μs。逆变器直流侧电压为48 V,控制信号采用基于TMS320F28335的DSP平台产生,采样频率为10 kHz。此外,该控制方法不包括逆变器死区时间的补偿算法。
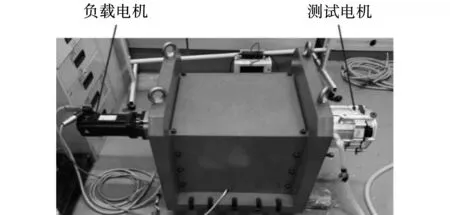
图14 双三相PMSM实验台架
图15是双三相PMSM通过实验得到的A相电流,可以看出电流波形与图12中基于分布参数仿真获得的A相电流波形较为一致,电流中都含有大量的5、7次谐波,证明了基于分布参数建立的数学模型能够较为准确地描述电机实际运行过程中的谐波特性。由于仿真过程中未考虑逆变器死区的影响,使得仿真得到的电流中谐波含量比实验所得谐波含量低。但总体而言,基于分布参数的数学模型对实际电机运行过程中的空间谐波特性的复现效果较好。
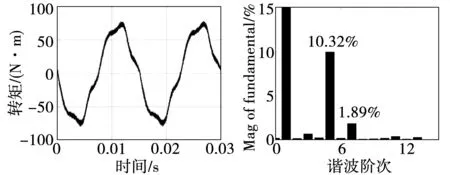
图15 实验所得A相电流和FFT分析
利用分布参数模型能准确描述电机的空间谐波特性的优势,考虑通过前馈合适的谐波电压的方法对电流谐波进行抑制。通过分布参数解析模型,可以准确计算需要前馈的谐波电压。图16为电机转速1 000 r·min-1、转矩10 N·m的工况下采用前馈谐波电压抑制方法后的实验结果,可以看出5次谐波含量由10.32%下降至2.08%,7次含量由1.89%下降至0.73%,抑制效果明显。由于双三相PMSM本身转矩脉动相对较小,因此在不考虑对电机转矩的影响下认为整体谐波抑制效果符合预期。通过谐波抑制的结果也进一步证明了分布参数数学模型对电机谐波特性描述的准确性。
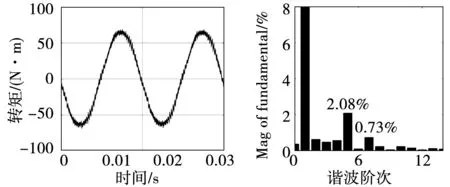
图16 基于前馈谐波电压抑制方法的实验结果
4 结 论
传统基于集中参数的双三相PMSM数学模型由于是在众多假设条件下建立的,并不能准确反映真实电机的空间谐波特性,在离线仿真以及基于模型的控制算法开发上都有较大的局限性。因此,本文选择利用分布参数的建模思想来建立双三相PMSM的电机模型。
分布参数建模方法的本质是将磁场非正弦和饱和引起的空间变化特性用统一的数学模型加以解析化描述。本文通过重构磁链获得了双三相PMSM分布参数数学模型,将分布参数建模方法成功推广应用到双三相PMSM的建模中。通过将分布参数模型结果与FEA仿真结果进行对比,发现分布参数模型与FEA结果有着高度的一致性,可以准确反映双三相PMSM的空间谐波特性。并通过仿真和实验分析,证明了分布参数模型在表征双三相PMSM空间谐波特性方面的有效性。