基于卷积神经网络的地下水磁共振数据随机噪声压制方法
2022-06-22蒋川东田宝凤段清明尚新磊
李 邦,蒋川东,2,3,王 远,2,3,田宝凤,2,段清明,2,3,尚新磊,2,3
1.吉林大学仪器科学与电气工程学院,长春 130026 2.地球信息探测仪器教育部重点实验室(吉林大学),长春 130026 3.国家地球物理探测仪器工程技术研究中心(吉林大学),长春 130026
0 引言
地面磁共振探测(magnetic resonance sounding,MRS)是一种非侵入式直接探测地下水的技术。和其他地球物理探测方法相比,MRS技术具有直接高效、信息量丰富、定量准确及解释唯一的优点[1]。近年来,MRS技术还被应用到水污染监测、水文环境评价[2]和地质灾害预警等领域[3]。
MRS信号微弱,仅为纳伏级别,极易受到周围环境中电磁干扰的影响,导致采集到的MRS数据质量严重依赖于测量地点的电磁噪声水平。尤其在城市和村镇这些人类活动较多的区域进行磁共振探测时,MRS信号被噪声完全淹没,信噪比极低,这使得MRS数据反演解释的准确度严重下降[4]。同时这也是制约目前MRS技术大规模应用的主要瓶颈。因此,研究磁共振信号的噪声压制具有非常重要的意义。
根据噪声来源和信号特征的不同,地面磁共振数据中的噪声可被分为随机噪声、工频谐波噪声和尖峰噪声3种。去除工频谐波噪声的方法有自适应滤波[5]和工频谐波建模[6]等,去除尖峰噪声可以用压缩小波变换方法[7],通过上述方法可以较好地去除这两种噪声。随机噪声的特征为高斯白噪声,一般通过叠加多次测量数据取平均值的方式减小[8]。2018年,王琦等[9]提出基于稀疏表示的随机噪声背景下多弛豫MRS信号的提取方法。林婷婷等[10]使用时频峰值滤波(time-frequency peak filtering,TFPF)方法,对随机噪声起到了良好的压制效果。但上述两种方法处理过程较为繁琐,计算耗费时间长,对于野外实验取得的大量数据难以实现实时处理,且仍不能完全达到满意的噪声压制效果。
针对MRS信号随机噪声压制中存在的上述问题,本文提出使用卷积神经网络(convolutional neural networks,CNN)[11]对磁共振数据中的随机噪声进行压制。本文首先介绍地面磁共振数据信号和噪声的特征,以及基于CNN的MRS数据噪声压制的过程。然后,利用CNN对仿真MRS数据进行随机噪声压制,并与TFPF方法处理的结果进行对比,证明CNN的优势。最后,通过野外实测数据的MRS噪声压制结果,验证了基于CNN的MRS数据随机噪声压制方法的有效性和实用性。
1 原理与方法
1.1 磁共振信号及其噪声特征
在发射线圈中通入Lamor频率电流,向地下发射电磁场,地下水中的氢质子被电磁场激发,形成宏观磁矩,这一宏观磁矩在地磁场B0中以B0方向为轴进行旋进运动。自由感应衰减(free induction decay, FID)是核磁共振与磁共振成像中最简单的信号形式。受激发的氢核对磁振频谱仪或磁振造影扫描器的射频线圈造成感应电流而产生信号,并因为发生弛豫而使信号强度逐渐衰减至0,这种逐渐衰减的信号即称为FID。当激发场停止后,氢质子旋进产生弛豫现象;地面接收线圈记录到的宏观磁矩进动产生的电磁信号就是FID信号VFID,可表示为
(1)

由于FID信号极为微弱,单位仅为纳伏级别,要采集这样的微弱信号就必须使用高灵敏度的接收器。因此,最终采集到的信号中包含了大量噪声。
采集到的MRS数据可表示为
VMRS=VFID+Vrandom+Vspike+Vharmonic。
(2)
式中:Vrandom为随机噪声;Vspike为尖峰噪声;Vharmonic为工频谐波噪声。由于尖峰噪声和工频谐波噪声已经有了多种成熟有效的去除方式,因此本文仅对MRS信号中随机噪声的压制展开研究。
1.2 MRS数据预处理
对采集到的数据进行尖峰压制和工频谐波建模消噪后,得到仅包含MRS信号和随机噪声的数据,对其进行希尔伯特变换,得到包络信号(以单指数信号为例)的实部Vr和虚部Vi分别为:
(3)
(4)
式中:df为频率偏量;εr与εi分别为噪声的实部和虚部分量。
CNN善于提取二维信息中的特征[11-12]。为了使用MRS数据训练CNN,首先利用式(5)对MRS信号E=Er+iEi(Er和Ei分别为MRS信号的实部和虚部)进行短时傅里叶变换 (short-time Fourier transform,STFT):

(5)
式中:τ和f分别为时频谱的时间点和频率点;ω(t-τ)为窗函数;X为神经网络的输入时频谱。
图1展示了纯净MRS信号和含噪MRS包络数据经过STFT后的时频谱[12-13]。可以看出,STFT的结果可以同时反映信号在时域和频域上的分布。含有更多信息的二维时频信号可以使神经网络学习到更多MRS信号特征,提高噪声压制结果的准确度。
2 基于卷积神经网络的噪声压制方法
CNN是一种多层的监督学习神经网络,运行的机制是输入层的数据在多个隐藏层中依次进行特征提取,最后在输出层输出,若输出与理想结果偏差超过可接受的范围,则调整隐藏层神经元的权重和偏置[13]。这样根据输入和输出结果之间的关系,训练得到一个最优的模型的方法,称为监督学习。本文利用如图2所示CNN结构。
网络主要包含输入层、卷积层、批归一化(batch normalization,BN)层、激活函数层和输出层。
卷积层通过将卷积核与输入数据作卷积运算,提取输入数据不同位置的局部特征。而通过设置平移步长,可以令卷积核分别提取数据不同位置的特征,最终得到输入数据的特征图(feature map)。卷积操作的公式为
C(i,j)=(X*W)(i,j)=

(6)
a. 纯净MRS信号的实部;b. 纯净MRS信号的虚部;c. 仅含随机噪声MRS信号的实部;d. 仅含随机噪声MRS信号的虚部。

含噪时频谱和结果时频谱图片前面的是实部,后面的是虚部(示意图)。
式中:i、j、m、n分别为位置坐标;W为卷积核;*为卷积运算;C为卷积结果。
为了避免神经网络的内协变量偏移,每层使用批归一化方法[14]。批归一化层在神经网络层的中间进行预处理,即上一层的输入经归一化处理后再进入网络的下一层,这样可有效地防止训练时发生梯度爆炸,并加速网络训练。每层卷积层均使用线性修正单元(rectified linear unit,ReLU)函数[15-16]作为激活函数。
CNN大多采用池化层对上一层的输出特征进行下采样以及对网络引入平移不变性。本文研究内容为由输入含噪时频图像得出纯净MRS信号的时频图像,由于训练集中信号的频率与测试MRS信号的频率较为接近,训练集和验证集的时频图像出现位置相差不大,因此不需要用到池化层的平移不变性。基于以上两点原因,本文构建了不含有池化层的CNN。
隐藏层中包含27个卷积层,每个卷积层后都设置一个批量归一化层与激活函数层,共81层。不同卷积层所对应的神经元节点数在300~1 000不等。第一个卷积层使用了大小为9×8的卷积核,后续卷积层使用的卷积核大小为9×1与5×1。就如前文所述,卷积核大小为9×1的卷积层代替了池化层的作用。在隐藏层的最后,使用全连接(full connection,FC)层获得神经网络的输出。
本文将纯净FID数据和去噪后数据的时频谱之间的均方误差(mean squared error,EMS)作为损失函数来训练网络参数:
(7)

最后,我们采用Adam算子[17]最小化损失函数对网络进行优化。
第二天一早,一看表,七点多啦!完蛋了,看来又得挨批了。我赶紧起床洗漱,一抬头,哇!镜子里那只“熊猫”是谁呀!都是蚊子惹的祸!唉,蚊子呀蚊子,你犯下的滔天大罪我会永远记住的!
3 结果
3.1 实验过程

对训练集数据的实部和虚部分别进行STFT,得到其时频谱。实验中STFT的窗宽设置为256,重叠率为0.75。为了降低神经网络所需的运算资源,在进行训练时,只取-700~700 Hz的时频信息作为神经网络的输入和输出。每一次训练分别是以含噪信号的时频矩阵作为网络输入,对应的纯净MRS信号的时频谱作为输出。
设置每次训练的批次大小为512,初始学习率设置为10-3,每迭代4轮之后,学习率衰减为之前的1/2,一共迭代24轮。
本文训练CNN所用的计算机配置为:CPU i5 8500,RAM 32 Gb。该计算机使用给定的训练集对CNN进行训练,总用时538 min。神经网络模型一次训练完成后,后续每次对MRS信号做噪声压制时只需把信号做STFT后,得到的时频矩阵与神经网络的参数矩阵做线性运算,这个过程仅需0.32 s,而TFPF方法耗时为6.89 s,相较之下极大节省了数据处理所需的时间。
3.2 基于CNN的MRS随机噪声压制结果
使用训练完成的CNN模型对随机挑选的一组验证MRS信号的噪声压制后,数据的信噪比为5 dB。从图3a、b可以看出,经噪声压制之后的MRS信号与纯净MRS信号包络能够较好地吻合;由图3c、d,3e、f与图3g、h可以看出,经CNN噪声压制后的时频谱与纯净信号的时频谱基本相同,证明了CNN方法可以对MRS信号中的随机噪声起到良好的压制作用且不存在MRS信号的能量损失。
3.3 噪声影响
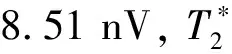
a. MRS数据实部的时域图;b. MRS数据虚部的时域图;c. 含噪数据实部的时频谱;d. 含噪数据虚部的时频谱;e. 纯净信号实部的时频谱;f. 纯净信号虚部的时频谱;g. 噪声压制后实部的时频谱;h. 噪声压制后虚部的时频谱。

a. SNR=5 dB,实部;b. SNR=5 dB,虚部;c. SNR=0 dB,实部 ;d. SNR=0 dB,虚部;e. SNR=-5 dB,实部;f. SNR=-5 dB,虚部;g. SNR=-10 dB,实部;h. SNR=-10 dB,虚部。
由图4可以看出,当信噪比大于等于-5 dB时,经CNN噪声压制后,实部和虚部的包络曲线与纯净FID信号包络(图中红色曲线)基本重合。当信噪比为-10 dB时,消噪后包络曲线略有扭曲。


表1 CNN与TFPF单指数信号噪声压制结果参数拟合效果对比
3.4 CNN与TFPF对比

图5为这1组多指数MRS信号加入不同水平噪声后分别使用CNN和TFPF两种方法进行噪声压制的结果。
由图5可以得出,对于多指数MRS信号,当信噪比大于0 dB时,CNN和TFPF两种方法均可以对噪声实现有效的抑制。当信噪比小于-5 dB时,TFPF方法得到的包络信号产生严重的失真,此时CNN方法的效果显著优于TFPF方法。

针对不同信噪比,分别使用CNN和TFPF对不同信噪比情况下的100组仿真MRS数据进行噪声压制。单指数信号处理结果的信噪比和均方根误差(root mean squard error,ERMS)见表2,多指数信号处理结果的信噪比和均方根误差见表3。其中均方根误差采用式(8)计算:

a. SNR=5 dB,实部;b. SNR=5 dB,虚部;c. SNR=0 dB,实部;d. SNR=0 dB,虚部;e. SNR=-5 dB,实部;f. SNR=-5 dB,虚部;g. SNR=-10 dB,实部;h. SNR=-10 dB,虚部。

(8)
式中,k为时频谱矩阵中元素数目。

表2 CNN与TFPF单指数信号噪声压制结果信噪比和均方根误差对比
表2和表3列出的数据表明:经CNN方法进行噪声压制后的信号拟合误差相比TFPF方法的结果拟合误差更低;在进行实验对比的信噪比下,CNN的拟合误差明显低于TFPF。
另外可以看出,基于CNN和TFPF的两种MRS随机噪声压制方法,在信噪比高于0 dB时,均可有效地压制噪声,其ERMS均小于20 nV。在信噪比低于0 dB时,CNN方法的ERMS仍小于20 nV,而TFPF方法的ERMS已经高于20 nV。整体来看,CNN方法噪声压制结果的信噪比提升量在各个场景下都比TFPF方法高出8~11 dB,而CNN处理结果的ERMS值比TFPF方法降低了59%~82%。由此可以得出:CNN进行噪声压制后的MRS仿真信号信噪比获得了提升,且信噪比提升效果明显优于TFPF方法处理的效果。以ERMS作为评估指标时,CNN处理结果拥有更低的ERMS值,效果同样优于TFPF方法。

表3 CNN与TFPF多指数信号噪声压制结果信噪比和均方根误差对比
3.5 野外实测数据验证
为了验证本文设计的CNN对实际采集MRS信号进行随机噪声压制的有效性,在吉林省长春市烧锅镇进行了MRS探测实验,探测点附近均为农田和树林,地势平坦,且临近水库,具有丰富的地下水资源。野外实验数据使用JLMRS-IV型磁共振地下水探测仪获得,测量地点的地磁场强度为54 908 nT,Larmor频率为2 338 Hz,地磁倾角为60°,发射/接收一体线圈的尺寸为100 m×100 m,使用不同发射脉冲矩测得16组MRS信号。以实测磁共振信号作为研究对象,并与TFPF方法作比较。图6展示其中一组测量信号的噪声压制结果。

4 结论
1)为了克服随机噪声给磁共振反演解释带来的问题,本文设计了用于压制MRS信号中随机噪声的CNN,并使用仿真数据和实测数据做了验证。
2)使用CNN对单指数/多指数MRS信号进行噪声压制时均能取得良好的效果。与TFPF方法进行对比,CNN的噪声压制效果更优秀。
3)通过野外实测数据验证,得到了和仿真实验相同的结论,证明了此方法在实际工程应用中的价值。