基于DAS信号和CNN分类算法的人员运动轨迹监测方法
2022-06-22董旭日王天琪衣文索
董旭日,冯 晅,刘 财,田 有,李 静,王天琪,王 鑫,衣文索
1.吉林大学地球探测科学与技术学院,长春 130026 2.长春理工大学光电工程学院,长春 130022
0 引言
人员运动轨迹监测目前主要通过相机、运动传感器、热成像和雷达技术等实现[1]。其中:相机可以捕捉到广泛的信息并且清晰度很高,但在光线不好或黑暗环境中无法监测,甚至在某些情况下被禁止使用;运动传感器需要将传感设备佩戴在人员身上,不具有普适性;红外热成像技术可以在黑暗环境中使用,但是各种热源的干扰无法消除,且穿透性差、覆盖范围小[2];雷达技术虽然可以穿越障碍物进行探测,但容易被干扰,尤其是在存在大量电磁干扰的城市环境中[3-4]。
Juarez等[5]基于相敏光学时域反射仪的分布式传感器系统在沙漠地形中检测和定位入侵信号位置,但其不能区分信号类型,而且试验场地位于沙漠中,信号相对单一。Yan等[6]利用光纤布拉格光栅传感技术跟踪定位人员,通过实验采集到了人员和车辆的信息,但是其需要检测和分析地震波形的频率和振幅等信息对信号来源进行识别和分类。分布式声学传感(distributed acoustic sensing, DAS)是一种基于光纤传感的新型高密度地震采集系统技术,它将光纤转换为一种测量应变的阵列工具,可以在整根光纤上进行连续、实时的测量,通常用于获取温度、应变和振动数据。DAS能够在黑暗、有其他热源和电磁干扰源的环境下无接触地进行运动轨迹监测[7]。在城市地区,DAS测量已经被用于近地表的地下速度结构成像和地震数据采集[8-12]。目前利用DAS进行近地表勘探的监测技术正处于发展阶段,但仍存在许多需要攻克的问题,如具有高空间密度采样率但信噪比不如传统地震检波器,高频率采集大量数据的同时也需要对应的快速数据处理方法以便实时预警等,所以DAS的潜能还有待进一步开发和完善。
拾取到达时以地震振动信号和环境噪声的差异为基础,常用能量比法、赤池信息准则(Akaike information criterion, AIC)算法、极化分析法和长短时窗比值(STA/LTA)法等[12-16]。但以上方法存在不同问题,如:能量比法无法提取噪声较强信号的初至时间[13];AIC算法在拾取不包含确定地震信号的地震记录时寻找一个极小值作为初至点,会出现错误拾取[14];极化分析法只能在时域或者频域进行计划分析[15];STA/LTA法能够利用振动信号和环境噪声信号振幅与频带的差异拾取振动信号[16],但人员运动信号振幅与环境噪声信号振幅差异较小难以区分时,无法拾取准确的人员运动信号。所以本文拟引入信号的自动分类方法解决DAS数据信噪比低的问题。
根据信号的特征,自动分类的主要方法目前有基于似然(likelihood-based, LB)的方法和基于特征(feature-based, FB)的方法[17-18]。在贝叶斯意义上,LB方法可以使错误分类的概率最小,但其通常伴随着相当大的计算复杂性或对未知信号条件场景的敏感性;FB方法通常使用几个特征并依据其观测值做出分类,降低了计算复杂度但提供的解不是最优的。在分类阶段,传统的分类器包含随机森林、k近邻、高斯朴素贝叶斯和支持向量机等方法,但这些方法通常需要大量的专业领域知识并手动提取特征,非常耗时[17-19]。
随着人工智能技术的广泛应用,深度学习方法在计算机视觉、情感分析、语音识别等领域都取得了成功,与传统的数据分析处理方法相比,深度学习无需设计手动功能即可自动获得更好的复杂高维数据表示,其性能甚至已经优于人脑在图像分类中的表现[20]。卷积神经网络(convolutional neural network, CNN)在图像分类、分割和反演方面发展迅速[21]。卷积网络的想法最早源于Hubel和Wiesel于1962年对猫的初级视觉皮层的经典研究,1990年LeCun等提出了现代CNN框架的原始版本并继续对其改进,于1998年提出了基于梯度学习的CNN模型LeNet-5,2012年Krizhevsky等提出了一种更深结构的CNN架构AlexNet,随后研究人员在前人研究的基础上进行改进来提升性能[22]。CNN优势在于能够在低信噪比的情况下自动学习,从原始长符号率的数据中提取特征,无需专业领域知识和手动提取就可以解决复杂模型和复杂任务,因而优于传统的自动分类识别方法,且发展至今已经趋于成熟。将深度学习方法用于斯坦福地震数据集上,监测地震信号的准确度高达100%[23]。Yashashwi等[24]利用CNN训练后减少了随机频率和相位偏移的影响。
利用DAS系统采集到的数据包含多种复杂的振动信号,不同信号源产生的信号特征不同。为验证监测和识别不同震源在地面所产生振动信号的有效性,我们在吉林大学朝阳校区校园内布设环形光纤,利用DAS采集来源于光纤上方的人员走动信号、重锤信号和环境噪声信号3类数据;用STA/LTA法对信号进行自动识别,分析3类信号在时域和频域的差异;基于CNN能够对目标自动分类的理论,将少量不同类别的振动信号作为神经网络的输入数据,通过神经网络的学习和训练验证数据自动输出的分类结果,确定人员所在的光纤道,追踪人员位置,输入更新的DAS信号连续识别人员运动信号,监测人员运动轨迹,并计算运动速率。从而为利用DAS实现在城市环境中对振动信号分类和人员监测提供一种切实可行的方法。
1 方法原理和流程
1.1 自动拾取
采用微地震常用的初至拾取方法——STA/LTA法自动识别并拾取DAS数据中的各类振动信号。STA/LTA法利用振动信号振幅大、频带窄,噪声信号振幅小、频带宽的特点,计算一长一短两个滑动时窗内DAS记录特征函数的平均值,长时窗反映环境噪声能量平均值,短时窗反映振动信号能量平均值。当振动信号到达时,短时窗内的能量变化比长时窗的能量变化快,比值会有明显增大,以此作为识别信号的依据。STA/LTA法的比值函数计算公式为[15]:
(1)
(2)
式中:i为地震数据中任意一个测试点;Si为短时窗能量;Li为长时窗能量;Ci为特征函数;Nl、Ns分别为长、短时窗的长度;(xi,yi,zi)为地震记录三分量数据。
由于DAS采集的振动信号只存在沿着光纤轴向传播的单分量数据,并不适用于传统三分量地震记录数据。因此在此方法的基础上,将特征函数更新为适用于DAS记录的单分量数据形式。同时为减弱DAS数据中强能量噪声信号影响、突出振动信号,在处理DAS数据时我们把特征函数设为连续相邻3道数据的均方根:
(3)
式中,x1,x2,x3分别代表连续3道的光纤记录数据。
当振动信号到达时,Ri明显突增。只需提前设置好一个触发阈值,Ri达到或超过触发阈值时即可认为是信号出现的时间。利用STA/LTA法识别信号的起跳时间并不是事实中振动信号的起跳时间,而是Ri刚好超过触发阈值的时间。为保证截取信号的完整性,将识别到触发阈值前的0.05 s作为截取的初始点,截取的时间窗长设为0.20 s,即可实现自动识别并拾取完整的信号数据。
1.2 数据预处理
基于DAS信号和CNN分类算法的人员运动轨迹监测方法流程(图1)如下:首先利用DAS进行数据采集;然后对采集到的数据进行自动识别并拾取振动信号;再对拾取的振动信号进行带通滤波、归一化去均值和希尔伯特变换处理压制噪声;之后在时域和频域中分析振动信号,找到各类信号的差异并分类;接着将分类好的数据输入到CNN中学习训练,得到最优的权重参数,对输入的信号进行自动分类;最后通过分类得到连续的人员运动信号,实现对人员运动轨迹的监测。
DAS记录到的数据中包含了较多的城市环境噪声信号和系统自身光电信号,且这部分信号的能量较强又持续存在。为了减少环境和系统噪声的影响,需要对DAS拾取的信号进行带通滤波处理。先在频域中分析噪声信号,以确定噪声的频段范围;再在频域中分析人员运动信号和重锤信号,确定频段后将人员运动信号和重锤信号的带通滤波范围分别设定为15~25、25~45 Hz。
DAS记录的数据在光纤与解调仪的连接处会有较强干扰,数据分布范围差异较大。通过数据的归一化处理可以在二维数据剖面中突出振动信号出现的位置和时间,同时在机器学习中将各个特征的尺度控制在相同的范围内便于找到最优解。去均值可以把各个维度的输入数据中心化到0,从而减小计算量。归一化和去均值计算公式如下:

(4)

(5)

为了压制随机噪声(包括外部干扰、风声、电子仪器噪声等),提高数据信噪比,对DAS数据进行希尔伯特变换求得瞬时振幅,以能更清晰地反映信号能量的变化[25]。经过希尔伯特变换后得到的是信号实部与虚部能量的均方根,只有正向频段。
1.3 CNN构建
DAS记录的是一定时间内地表或地下震源振动产生的信号,本质是一维振动信号。当外界没有震源振动时,DAS信号是周期振动信号。当外界出现振动信号例如人员和车辆移动时,DAS信号就成为了非周期振动信号,且各种震源的振动周期不同。深度学习得到广泛关注的原因在于其能够自动提取不同数据的特征。CNN可以自动提取DAS采集到的周期振动信号和非周期振动信号的特征,因此可以通过构建CNN对DAS信号进行分类。本文利用CNN实现对DAS的信号分类,但只包含两种分类结果(正常信号和异常信号)是远远不够的。为实现对基础噪声、人员运动、震源信号甚至更多类别的信号分类,需要对网络在分类组数和数据维度两方面改进,实现对多维数据进行分类。改进后网络的参数包含分类组数、输入数据维度和数据长度。网络以原始DAS信号的时间序列作为输入,输入数据长度相同,输出分类标记结果。
常规CNN通常由输入层、卷积层、激活层、池化层和输出层组成。本文所用的CNN架构如图2所示,包括33层卷积层、33层组归一化层、33层激活层、16层防止过度拟合层、1层全连接层和1层预测概率层。这些操作会在层间反复进行,每一层都学习监测不同的输入数据特征。与常规CNN架构不同的是,本文CNN架构在每个卷积层之前采用组归一化层和激活层。组归一化层通过减去均值再除以方差的方式将数据变为均值为0、方差为1的正态分布,以防止梯度爆炸和梯度消失。激活层为保留特征较好的值而将特征小于0的值舍去。在神经网络中包含的多个非线性隐藏层能够学习输入和输出之间复杂的关系,但训练使用的DAS数据有限,输入与输出的复杂关系有许多是采样噪声的结果,它们存在于训练集中却又不是真实的测试数据,这就会导致过度拟合。因此在每两个卷积层之间和激活层之后加入了防止过度拟合层,一旦数据集分类结果准确性变差就会停止训练,并引入多种权重惩罚,降低分类错误率,提高网络训练及验证的效率[27-29]。从输入不同类别的DAS信号开始训练网络,初始化卷积层的权重,使用带有默认参数的Adam优化器,综合考虑梯度的均值和方差,使损失函数达到最小,从而优化参数。Adam能够训练数据迭代更新神经网络权重,优化过程中保存验证集评估的最佳模型即可以得到整套CNN架构。

图1 基于DAS信号和CNN分类算法的人员运动轨迹监测方法处理流程图
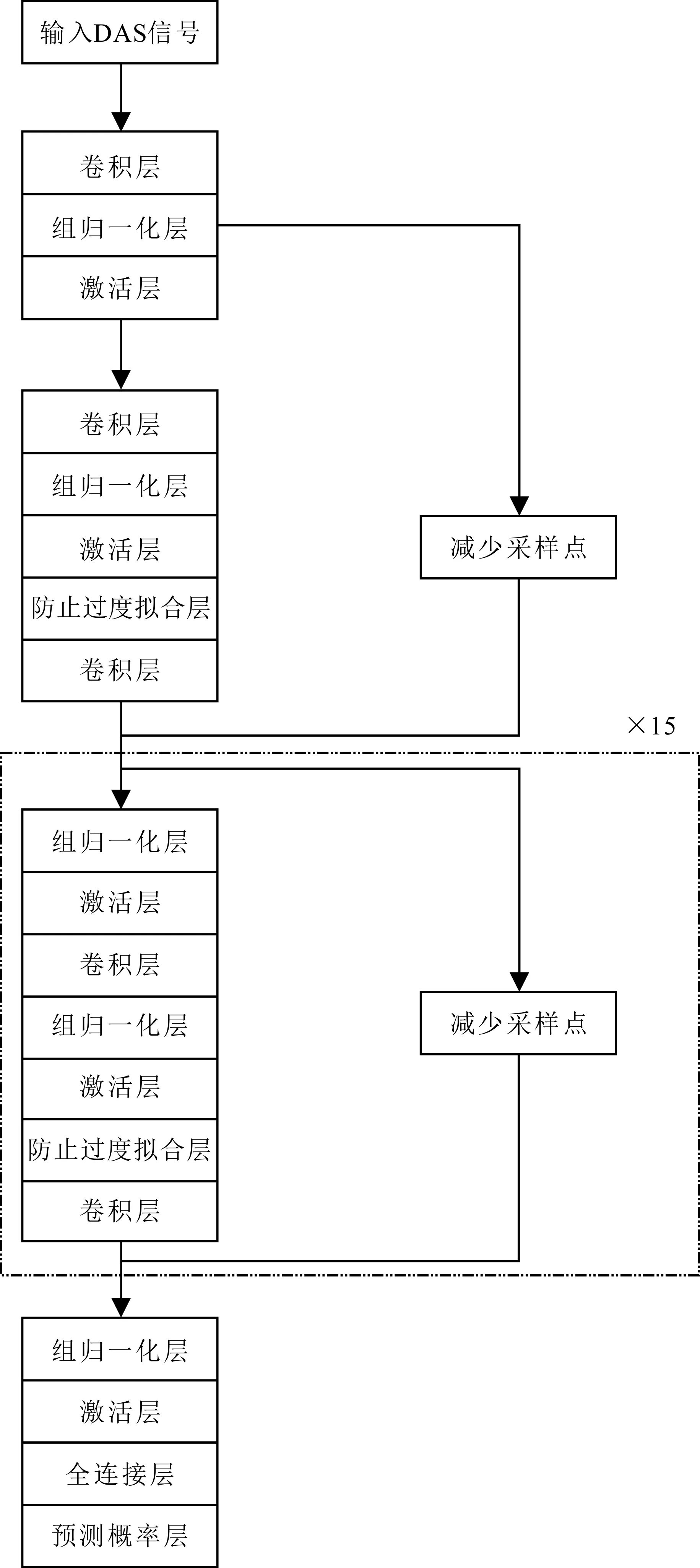
图2 CNN架构图[26]
2 实际数据采集与处理
2.1 DAS数据采集
实验场地选在位于吉林省长春市的吉林大学朝阳校区校园科技之星广场草坪内。在草坪下方约50 cm深度处布设了全长约为400 m环绕场地一周的光纤,数据采集方式为连续观测,道间距为5 m,共80道,采样率为2 000 Hz。DAS系统的主机是信号源的发射、接收和解调装置,位于实验场内的实验楼(化学楼)中,与光纤的起始端(即第1道位置)和尾端相连。整条光纤的布设以东西走向为主,但由于现场条件的限制,布设光纤时没有完全与东西走向的公路平行或垂直,在某些区域会有弯曲。实验场地内实验楼、排风机等已有设施在实验过程中持续产生噪声。
2020年10月22日21:00,实验场地无人走动,开始开展人员运动信号采集实验。实验人员由光纤的起始位置开始匀速环绕光纤行走一圈回到初始位置,通过记下行走的开始时间及到达中途标记好位置的时间即可以在DAS记录到的数据中找到对应人员行走的信号响应。受实验场地的限制,布设的光纤在拐角处较为曲折,未能呈现为标准矩形。光纤的布设只有53--80道是近似于一条直线的,因此重锤实验的测线选择在53--80道上方进行。噪声的信号拾取选择在2020年10月23日1:00之后,在DAS记录到的数据中随机截取道和时间。为保证信号的一致性,截取信号的时间长度均为0.20 s。
2.2 数据处理
由于始终存在的城市环境噪声以及DAS系统噪声的干扰,得到的60.00 s原始波形(图3a)受噪声干扰较为严重,尤其是初始5道和最后10道处有较强的高频、高能量噪声,这一方面是受光纤与DAS系统接口的影响,另一面也是因为在74--80道间存在持续运转的排风机。
在图3a中的虚线框内随机提取5.00 s连续3道(45、46、47)的DAS原始数据,用STA/LTA法拾取人员运动信号(图3b)。从图3b中可以看出,DAS原始数据持续存在高频噪声,且信号的起跳时间不易确定。
对3道原始数据求均方根得到的结果如图3c所示,求均方根后的结果有效压制了随机噪声,突出了人员运动信号。将此均方根作为特征函数。从图3c可知,人员运动信号的能量减弱,目标震源逐渐远离传感器,由此可判断人员运动逐渐远离第46道。通过实验数据的测试将触发阈值设定为2.5,当Nl=100,Ns=40时能够较好地将Ri>2.5的时间点与振动信号的起跳时间点相对应。图3c中出现的6个峰值对应6次振动信号,即5.00 s内记录到6次人员运动信号。
图4 为DAS记录60.00 s人员运动信号的处理过程。经过15~25 Hz带通滤波处理后,去除了第80道附近的排风机噪声(图4a);通过归一化处理能够减少光纤附近非平稳噪声源对采集信号的影响[28],在周围持续的噪声干扰中突出人员运动信号(图4b);希尔伯特变换处理后的结果突出了人员正向频段的幅度值(图4c)。对比图4c和图3a可以看出,经过上述处理,前5道的高频高能量噪声以及70道之后的排风机噪声被很好地压制,得到了较为清晰的人员运动轨迹。由图4c可知,经过60.00 s的时间人员从第39道运动至第57道,所以这一时间段人员运动信号的拾取集中在39--57道。
重锤信号波形为图5a,与人员运动信号(图3a)相比,重锤信号的能量更强,传播轨迹更清晰,传播距离更远,起跳时间更容易确定。通过相同方法识别并提取重锤信号,Nl=100,Ns=80,振动起跳时刻的Ri>100,远大于其他时刻的Ri值(一般不大于5),触发阈值取在更大数量级(50以上),防止将周围人员走动或其他震源产生的信号拾取为重锤信号。
重锤信号传播区域在43--63道,通过25~45 Hz带通滤波后高频噪声干扰变小信号能量减弱(图5b),归一化去均值处理后(图5c)的传播区域扩大到40--78道,可以获取距离更远的直达波传播和到时信息。53--80道的传播呈线性关系;由于前53道光纤布设不呈直线,因此在第53道前的到达时间不呈线性关系。在相同的地下结构情况下,直达波到达时更久说明震源距离更远,依据此可以检验地下光纤的走向是否呈线性排列。计算53--80道处虚线的斜率可以计算重锤信号激发的直达波传播速度,约为210 m/s。

a. 原始波形;b. 3道原始数据;c. 3道数据均方根结果。虚线框内为人员运动信号,实线框内为人员运动信号位置。

a. 带通滤波后结果;b. 归一化去均值后结果;c. 希尔伯特变换后结果。虚线框内是人员运动信号。

a. 重锤信号原始波形;b. 带通滤波后结果;c.归一化去均值后结果。a、b中的虚线框内为重锤信号;c中的虚线是重锤激发的直达波。
3 目标信号特点及人员运动轨迹估算
3.1 目标信号特点
图6对拾取出的0.20 s单道人员运动信号进行分析。图6b是对截取的人员运动信号做傅里叶变换得到频谱,其中主频集中在20~25 Hz之间,在100、120、220和370 Hz附近均存在能量较强的信号,此外还存在能量较弱的低频信号。为减少其他信号源对人员运动信号的干扰,将低频和高频段的其他信号源作为噪声信号,对人员运动信号都采用15~25 Hz的带通滤波,滤波后得到的结果为图6c,只能得到一个完整周期的人员运动信号。
图7a是拾取得到的0.20 s单道重锤信号原始波形,振幅强度远高于人员运动信号的振幅,超过3个单位强度。对图7a的原始重锤信号做傅里叶变换得到频谱图7b,重锤信号的频带范围在30~40 Hz,但依然在100、180、220和340 Hz附近存在能量较强的信号,与人员运动信号频谱(图6b)出现的强信号频段基本吻合。图7c是经过25~45 Hz滤波后的重锤信号波形图,能量远高于背景噪声,相比人员运动信号受噪声影响较小,因此得到的波形更加清晰完整。
图8a是5.00 s的单道噪声信号波形,振幅值不超过0.4。图8b是从图8a中随机截取的0.20 s噪声数据,通过波形可以看到存在低频和高频的信号,但能量强度大的信号主要为高频信号。图8c是环境噪声的频谱图,噪声的主频集中在10、100、180、270和370 Hz。在上述人员运动信号和重锤信号高频段(100 Hz以上)中出现的次强能量信号频率基本一致,不与人员运动信号和重锤信号的频带重合,又通过对环境噪声的分析可知,人员运动信号和重锤信号次强能量信号的频带范围与噪声的频带范围相同,因此可以将100、180、270和370 Hz频段的强能量信号视为DAS系统存在的系统噪声。由此能够在频域中将3类信号区分。通过噪声信号的整个频段范围来看,低频范围内的噪声能量较弱,频带越高噪声能量越强,也可能与DAS系统自身存在高频噪声有关。

a. 原始波形;b.频谱;c. 15~25 Hz滤波后波形。

a. 原始波形图;b. 频谱;c. 25~40 Hz滤波后波形。

a. 5.00 s单原始波形;b. 0.20 s原始波形;c. 频谱。
3.2 人员运动轨迹估算
通过前文中提到的方法,分别拾取出1 135个噪声信号、892个人员运动信号及576个重锤信号。3类信号的学习数据库、训练数据库和测试数据库的数据量分布情况如表1所示。
分别将120个噪声信号、171个人员运动信号和180个重锤信号测试数据输入到CNN中进行识别分类,结果如表2、3、4所示。可见,3类信号的识别准确率均达到80.00%以上,其中:噪声可能会被误判为人员运动信号,但不会被误判为重锤信号(表2),在3类信号中噪声分类的准确率最低,可能是由于噪声信号来源不确定,且存在高能量强噪声;人员运动信号分类的准确率最高,仅出现一个误判为重锤信号(表3),噪声信号和人员运动信号相互之间误判率较大,可能原因是存在距离远、信号较弱的人员运动信号,与噪声信号差异较小;重锤信号与噪声信号的误判率最低,分类效果最好,但仍有部分重锤信号被误判为人员运动信号(表4),可能是由于重锤信号输入到CNN中学习训练的数据样本较少,存在少量距离远、信号弱的重锤信号。

表1 CNN所用数据量的分布情况

表2 噪声信号的分类结果
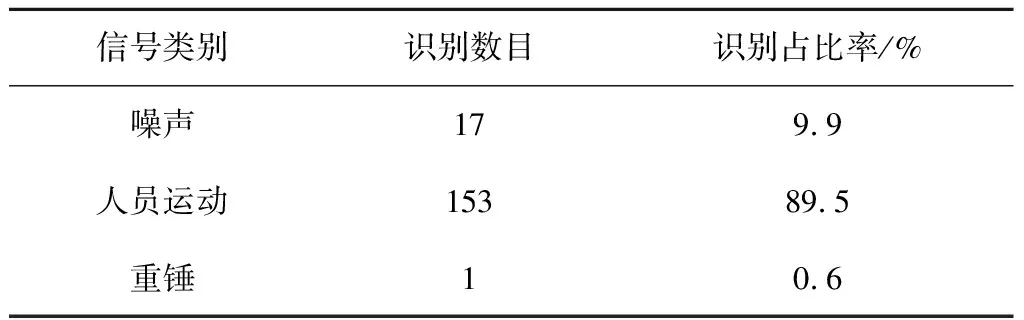
表3 人员运动信号的分类结果

表4 重锤信号的分类结果
将识别提取的信号输入到已经训练好的CNN中,可将分类好的人员运动信号输出从而确定人员所在的道号位置,人员运动到达的位置与DAS记录数据同步更新即可以监测完整的人员运动轨迹。图9是60.00 s人员运动轨迹图。由图9a可知,在3.00 s时刻人员位于光纤第38道,所对的空间位置如图9c所示,7.00 s时刻经过CNN分类得到的人员运动信号出现在第39道;因此判断人员运动的方向是沿着光纤向西移动,且通过移动的距离和时间可计算出瞬时速率为1.25 m/s。由图9b、d可知,人员在20.00 s时刻所在位置是第41道,从第38道运动到第41道的时间为17.00 s,由道间距5 m可得运动距离为15 m,由此计算出图9a到图9b过程中人员运动的平均速率约为0.88 m/s。图9e、g是38.00 s时刻人员运动到第45道,从第41道到达第45道用时18.00 s,运动距离20 m,运动的平均速率约为1.11 m/s,运动方向变为向西北方向。图9f、h是60.00 s时刻人员运动到第51道,从第45道运动到第51道用时22.00 s,运动距离30 m,运动的平均速率约为1.36 m/s,运动方向为北向。因此,从第38道运动至第51道用时57.00 s,此过程的平均速率为1.14 m/s。
在人员运动记录中利用5.00 s内相邻两个人员运动信号出现的时间间隔计算得到步频为84 步/min,通过计算的步频可以预测人员的运动方式是以较慢的速率行走。同时根据运动距离和步频可以求得平均步幅约为0.75 m。
上述结论证实基于CNN的DAS监测人员运动方法不仅能够监测运动轨迹,还能够预测运动方向、瞬时速率、平均速率、步频和步幅等更详细丰富的运动信息。

a. 人员到达第38道位置图;b. 人员到达第41道位置图;c. 人员到达第38道的空间位置图;d. 人员到达第41道的空间位置图;e. 人员到达第45道位置图;f. 人员到达第51道位置图;g. 人员到达第45道的空间位置图;h. 人员到达第51道的空间位置图。三角代表人员位置,圆圈代表光纤道号位置,黑色实线是传感光纤。
4 结论
1)在吉林大学朝阳校区校园内布设了400 m的光纤,利用DAS设备开展了人员运动、重锤敲击和环境噪声采集的实验。采用STA/LTA法自动拾取了DAS采集到的人员运动、重锤和噪声信号。
2)拾取的3类DAS信号通过滤波、归一化、去均值和傅里叶变换处理,在时域和频域中分析了不同振动信号的振幅和频带范围的特征差异,利用构建好的CNN架构对拾取的3类信号进行学习、训练及验证得到一个分类结果较为准确的CNN模型。
3)通过实际数据测试验证了CNN得到模型的稳定性,3类信号识别准确率均达到80.00%以上,解决了复杂特征的分类问题,能够确定3类信号的类型和所在位置,实时追踪目标体的运动轨迹和运动速率,实现了高准确率自动化识别分类复杂信号并监测人员运动轨迹。