考虑前车加速度信息的改进IDM模型研究
2022-06-18邓红星
邓红星,胡 翼,王 猛
(1.东北林业大学 交通学院, 哈尔滨 150004; 2.吉林大学 交通学院, 长春 130015)
0 引言
跟驰行为是一种常见的微观驾驶行为,描述了在限制超车的单行道上两辆相邻车辆之间的相互作用。跟驰理论是一种微观交通流理论,用于描述车辆的跟驰行为,进而分析车辆的运行效率和交通流的稳定性[1-2]。基于跟驰理论,从不同角度对车辆进行跟驰建模一直是微观交通流仿真研究的热点问题。Gazis等[3]根据刺激-反应原理提出了最经典的GM跟驰模型的通用表达式;Kometani等[4]考虑跟车安全距离提出了安全距离模型;Bando等[5]利用前车速度,车间距等信息建立了优化速度模型。然而,随着自动驾驶技术的发展,通过安装车载传感器、激光雷达和测量天线等设备,车辆能够获取更多、更精确的周围车辆的实时数据,并实现驾驶操作的辅助与智能决策[6-7]。在这种情况下,一些研究者对传统跟驰模型进行了改进,以适应自动驾驶技术。
Treiber等[8]基于自动驾驶技术提出了智能驾驶员模型(IDM)。该模型基于合理假设和现实参数对微观和宏观交通模型进行复制和解释。在高速公路交通的数据模拟中,利用测得的边界条件以半定量的方式成功再现了各种经验观察结果,发现该模型能够建立微观和宏观交通流的联系,在描述跟驰行为时具有可控的稳定性,有利于实现加减速平稳过渡的智能制动策略。随后,研究者主要从基于传统驾驶特性的角度和自动驾驶技术的角度对IDM模型进行了改进。
在基于传统驾驶特性对IDM模型的改进方面,近期的研究主要考虑延迟时间、驾驶难度等因素对跟驰特性进行分析。例如,Treiber等[9]考虑了延迟时间、测量误差和时间预测等因素,建立了HDM (human driver model)模型。拟合结果表明,HDM模型减小了自由交通和高速拥挤交通之间的转换梯度,增加了停走的波长,这与经验数据一致。然而,文章中的拟合数据使用高速路段数据,没有进一步调查IDM模型是否可以应用于拥挤的城市交通。Saifuzzaman等[10]通过引入驾驶任务难度作为驾驶任务需求和驾驶员能力之间的动态交互,建立了TDIDM模型。数值仿真结果表明,IDM模型通过精确获得前车的速度、车间距等信息,能在不同驾驶任务难度下有效控制主体车的跟驰行为,特别是在前车突然加速或减速状态下,IDM模型控制下的主体车仍能够保持较为平稳的跟车速度。然而,上述模型大都缺乏实车跟驰数据,少部分模型的验证数据来源于高速路段,缺少城市道路的跟驰验证,所以IDM模型在城市道路下的跟驰行为控制能力有待进一步认证。
在基于自动驾驶特性对IDM模型的改进方面,近期研究主要考虑多车信息、速度波动控制等因素对跟驰特性进行分析。例如,肖新平等[11]在经典IDM模型中加入速度差刺激项和非对称系数,并考虑了速度波动的异方差性等因素建立了IDM-GARCH模型。他们发现,通过引入速度差信息,IDM模型控制下的主体车能够及时获得前车运动状态,并根据本车与前车的速度差信息制定合理的跟驰决策。但是,当前车速度发生较大波动时,主体车也会产生较大的速度波动。Milanés等[12]基于车间距与期望车间距的误差、车间距误差权重、速度差权重和车间距误差微分权重等参数,提出了可搭载自适应巡航控制(ACC)的跟驰模型。仿真结果表明,适当地降低速度差权重,有利于减小前车的扰动对主体车的影响。同时,合理设置权重的分配,对车辆运行的稳定性有重要作用。Li等[13]提出基于多前车车头间距、速度差和加速度差的跟驰模型。仿真结果表明,改进后的模型通过获得周围车辆的信息,能够提前改变主体车的运动状态,提高车队的运行效率。该研究发现加速度信息对主体车跟驰行为有影响,模型考虑加速度信息能够有效降低前车速度的剧烈波动对主体车的扰动,有利于增强车辆运行的稳定性和舒适型。但是该模型基于全速度差模型进行改进,模型中的参数仍是驾驶员的感知数据。因此,有必要将加速度信息引入IDM模型,并设定适当权重对车辆的跟驰行为控制。
纵观以上IDM跟驰行为建模的相关研究,其中关于研究加速度信息对跟驰行为影响的文献较少。且有学者研究发现,在车型特征不同时,因视野受限等因素,会造成驾驶员对期望车头间距有不同的要求[14]。此外,目前IDM模型中参数的标定较少使用实际跟车数据,特别是使用城市道路交通下的数据对IDM模型参数的标定。本文将在分析车辆跟驰行为的基础上构建一种改进的AIDM模型,它考虑了信息接收和处理的延迟时间、反应车型特征的期望跟驰间距系数以及加速度等信息。并利用城市道路的实车数据对模型中的相关参数进行标定。通过引入前车与本车的相关运动信息,有望提高主体车的运行效率和舒适性。除了单车操控外,改进的AIDM模型也有望在车队操控方面取得不错的稳定性。特别是对于由AV组成的临时队列,它对提高队列和整个交通流的稳定性和运行效率具有潜在的作用。
1 模型
经典IDM模型是由Treiber等[8]在2000年提出,该模型由2部分组成,包含自由状态下的加速趋势和考虑与前导车碰撞的减速趋势[1],第n辆车在t时刻的加速度跟车辆当前速度、车头时距和与前方车辆速度差有关[15],具体形式为:
(1)
(2)

IDM模型将两车速度差作为影响后车加速度的因素,但在实际研究中发现,模型并不能很好地拟合前车在速度剧烈变化时对后车影响,原因在于前车剧烈的速度变化相较于平缓的加减速过程而言,对后车的加速度会产生更大的影响[11]。且有研究表明,前车为大型车时,后车会因视野阻挡和制动启动慢等因素显著影响后车驾驶员期望跟车间距的选择。另一方面,以往研究表明,考虑车头间距、速度差或前车加速度信息可有效地增强交通流的稳定性[13],但目前大部分IDM跟驰行为研究中,考虑前车加速度信息对车辆跟驰行为稳定性研究较少。因此本文考虑了驾驶员信息接收和处理的延迟时间、反应车型特征的期望跟驰间距系数以及前车加速度信息的AIDM模型,以提高模型的精度和交通流的稳定性。
(3)
式中:td为驾驶员信息接收和处理的延迟时间;τn为反应车型特征的期望跟驰间距系数,前车为小型车时,τ1=1,前车为大型车时,τ2=1.2;λ为驾驶员对前车加速度的敏感系数;an-1(t)为前方车辆的加速度信息。上述模型可以通过改变权重λ来探索前车加速度附加项的效果,从而提高干扰下的交通流稳定性。
2 线性稳定性分析
对于跟驰模型而言,稳定性分析是十分重要的一部分,为了研究加速度对交通系统稳定性的影响,本文用线性稳定性理论对AIDM模型的稳定性进行分析,将式(3)简化为:
(4)

(5)
假设yn(t)是车辆n在时间t产生的扰动,将扰动加入式(5)中:
(6)

对方程(6)两边进行二阶导数可得:
(7)
将式(4)代入式(7)可得:
(8)
线性化方程(8)可得:
(9)

重写式(9)得到差分方程:

(10)

(11)


z2(iαk)2)2)[z1(iαk)+z2(iαk)2+
(12)
(13)
(14)
当z2<0时,受到小扰动的交通流会变得不稳定,而当z2>0时,受到扰动的交通流会趋于稳定,因此,稳定性条件为:
(15)
(16)
当λ=0、td=0时,可以得到原IDM模型的稳定性条件:
(17)
(18)
(19)
(20)
(21)
将式(18)—(21)代入式(16),可进一步得到稳定性条件为:
(22)
根据式(22)获得了模型稳定性曲线。图1、2 分别是当td=0和td=1时,不同参数λ和τn下的稳定性曲线,其中a0=2、v0=10、s0=2.5、b=1.5。随着λ的增大,稳定性曲线逐渐降低,这表明考虑前车加速度信息能有效地提高交通流的稳定性[16]。且τ2=1.2时,交通流稳定性明显低于τ1=1时,这是由于前车为大型车时,因视野阻挡等因素导致后车驾驶员期望跟车间距变大,这表明较大跟车间距的交通流相对较为稳定。此外,也可以发现,td=1时的不稳定区域相较于td=0而言明显增大,因为反应时间的考虑会延迟车辆的反应,从而改变了车辆的运动状态,但这与实际情况相符,因此本文考虑驾驶员的反应时间对车辆跟驰行为的影响[17]。

图1 td=0 时不同λ和τn下的稳定性曲线

图2 td=1 时不同λ和τn下的稳定性曲线
3 参数标定
选取城市道路上汽车启动加速过程中的实际跟驰数据对改进的AIDM模型中的参数进行参数标定,由于实际跟驰数据前车均为小型车,因此取τ1=1。根据相关学者研究选定其他参数的值,首先对前车轨迹数据进行平滑去噪处理,再根据处理后的前车轨迹数据,通过改进后的AIDM模型仿真得到后车轨迹,将仿真得到的后车轨迹数据与实际后车数据进行对比,计算相关拟合误差数据,从而选取误差最小的参数作为模型的最优参数。
如图3和表1所示,通过对不同参数λ下得到的拟合数据与实际后车轨迹数据进行对比并计算均方误差、平均绝对误差和拟合优度等,从而确定λ=0.16时,改进后的AIDM模型拟合效果最优。此外,为了验证改进后的AIDM模型与原IDM模型在误差精度上面的优异,对2种模型的拟合结果进行误差分析,对λ=0.16下改进后的AIDM模型进行仿真,得到拟合后车轨迹数据并与实际轨迹数据进行对比,从而判断改进后的模型在拟合精度上是否有明显的提升,图4为2种模型拟合结果与实际后车轨迹数据对比,从图4中可以明显看出,改进后的AIDM模型在拟合精度上较原模型而言有了很大的提升,尤其是在城市道路汽车加速过程中,为了进一步量化对比2种模型拟合精度的差异,对原模型拟合数据进行相关检验指标的计算,原模型的均方误差为0.456 912,拟合优度R2=0.983 244,与表1中的数据进行对比发现,改进后的AIDM模型在拟合精度上要优于原IDM模型。

图3 不同参数λ下AIDM模型后车拟合轨迹数据曲线
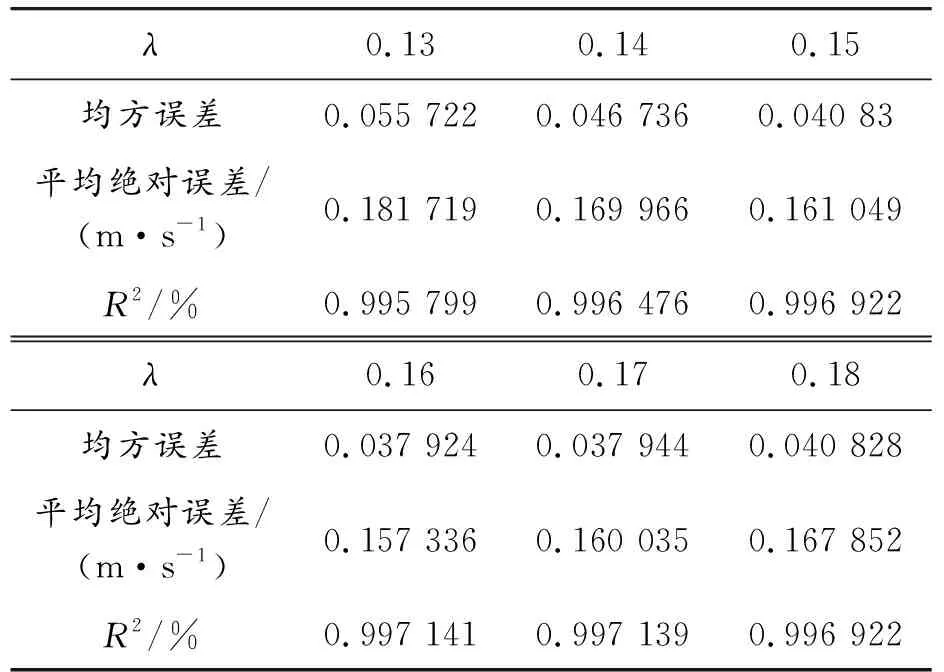
表1 不同参数λ对应的拟合误差
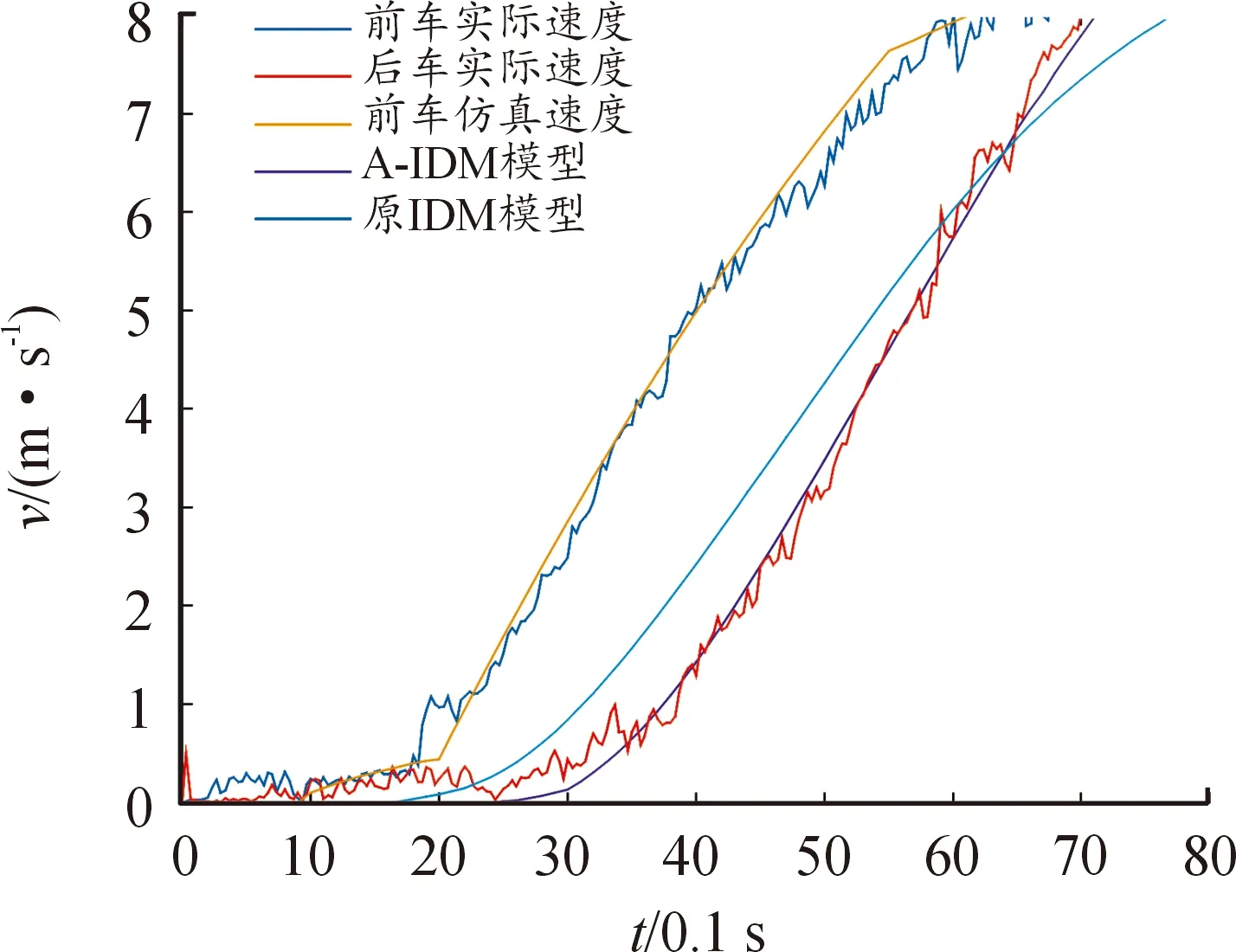
图4 AIDM和IDM模型后车拟合轨迹数据曲线
4 数值模拟
为了研究改进后的AIDM模型的动态性能,采用AIDM模型来模拟交通信号由红灯变成绿灯的情况下的汽车加速运动,并检验AIDM模型的一些特性。交通信号灯为红色时,20辆车排成一队,所有车辆均处于静止状态,车辆间隔为7.4 m,其中第5辆车为大型车。在t=0时,交通信号灯变成绿色,车辆开始启动,为了对改进后的AIDM模型和原模型进行比较,设置2个模型的参数如表2所示。
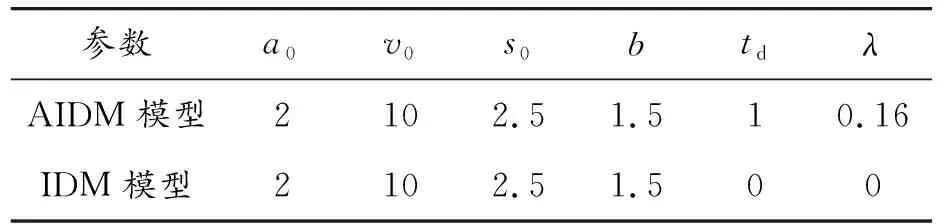
表2 AIDM模型和IDM模型的参数设置
通过对2种模型进行数值模拟仿真,得到这2种模型的加速度、速度和位置变化情况,如图5—7所示。
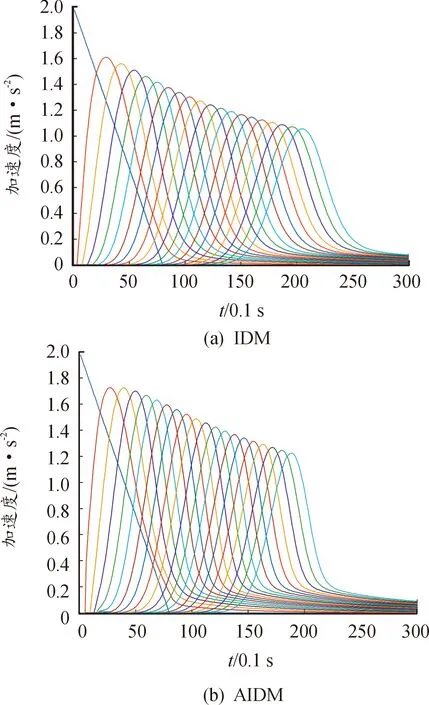
图5 车辆加速度分布曲线
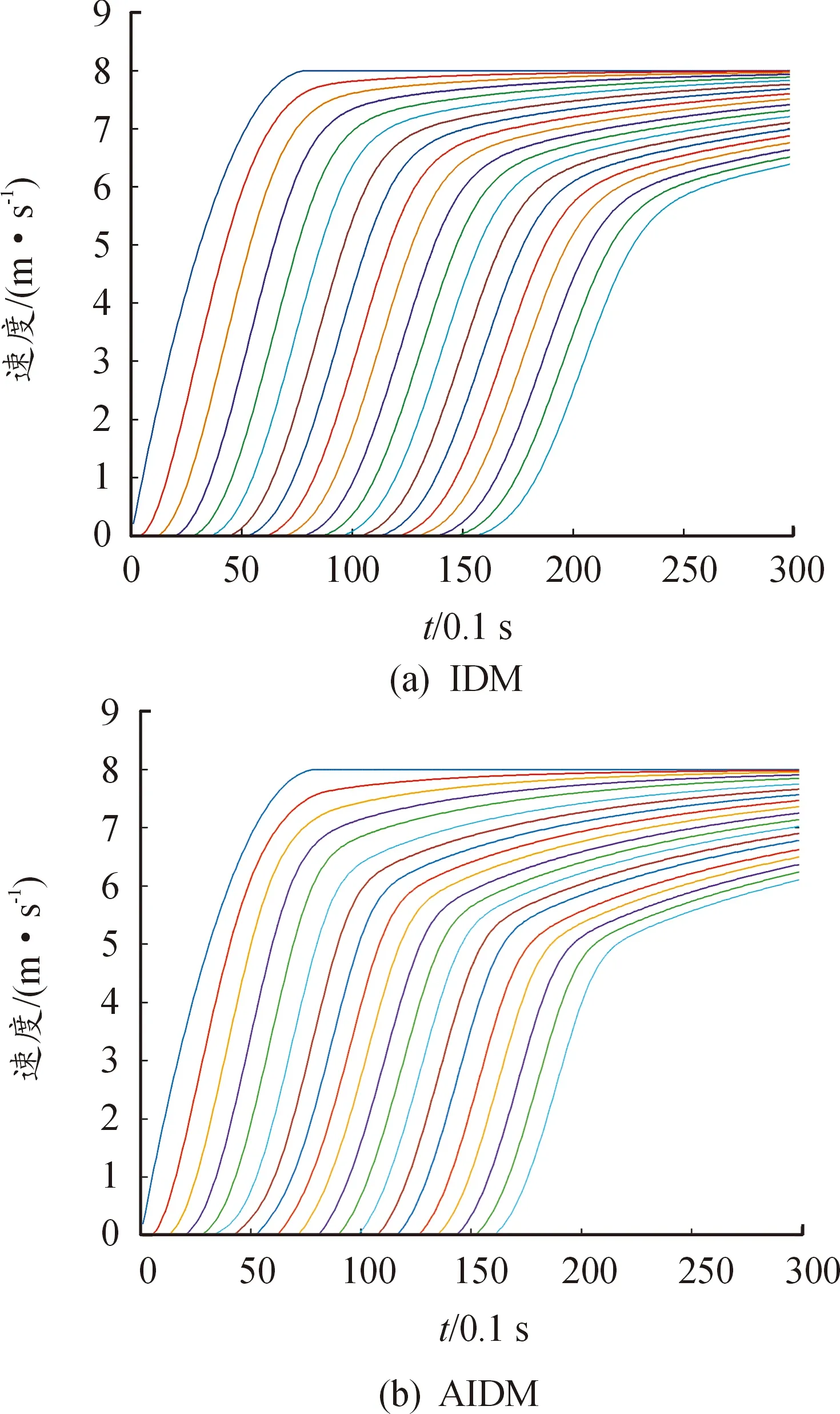
图6 车辆速度分布曲线

图7 车辆位置分布曲线
从图中可以看出:AIDM模型的加速度最大值比IDM模型的加速度最大值大,且加速过程所用的时间要少于IDM模型,AIDM模型的速度分布要比原IDM模型更快地趋近于最大值,这与车辆在交叉口真实的运动情况一致,驾驶员在交通信号灯由红灯变成绿灯后,一般会在安全的条件下尽可能提高车速达到最大速度,从而快速通过交叉口。
5 结论
1) 通过线性稳定性分析,得到了AIDM模型的稳定性条件,结果表明,考虑前车加速度信息能进一步提高交通流的稳定性,有效缓解交通拥堵。
2) 利用城市道路的实车数据对模型中的相关参数进行标定,通过误差分析得到模型的最优参数并对比分析2种模型的拟合精度。改进后的AIDM模型在拟合精度方面要优于原IDM模型。
3) AIDM模型在车辆的加速度、速度和车头距分布等方面均优于IDM模型,更加符合实际情况。
4) 由于交通系统的复杂性,后续需进一步扩大标定样本,对模型参数进行更准确的标定,且需要考虑前后多车影响下的跟驰行为,以符合自动驾驶等技术发展的实际需求。
