燃料电池混合动力客车自适应能量管理策略
2022-06-18孙志远吴景铼
孙志远,吴景铼,张 农,罗 亮
(1.合肥工业大学 汽车工程技术研究院, 合肥 230009;2.华中科技大学 机械科学与工程学院, 武汉 430074)
0 引言
汽车的大量增加带来了环境污染和能源短缺的问题,因此许多汽车制造商和研究人员开始使用其他能源来代替内燃机的使用[1]。燃料电池汽车具有高效率、零排放、加油时间短和行驶里程长等优点,被认为是最有前途的清洁能源汽车。然而,燃料电池动态响应速度较慢,且不能吸收制动期间的再生能量[2]。所以,配备辅助能源例如电池或超级电容器是很有必要的。研究表明,频繁变载、启停、连续低载和怠速工况等将导致燃料电池寿命快速衰减[3],为了提高燃料电池混合动力客车的燃油经济性和燃料电池的耐久性,则需要能量管理策略在各个动力源之间进行合理分配。
能量管理策略一般分为两类:基于规则策略和基于优化策略[4-6]。基于规则策略比较简单,主要包括一些确定性规则方法和模糊逻辑控制方法,来源于工程经验或者离线优化[7-8]。基于规则的能量管理策略可以用于实时在线控制,但无法取得最优的控制效果。越来越多的研究人员开始研究基于优化的策略。动态规划算法(dynamic programming,DP)能够达到全局最优的效果,但是需要知道整个驾驶循环,而且计算量太大,因此不能用于实时控制[9]。PMP(pontryagin’s minimum principle) 通过使各个时刻局部最优从而达到全局最优,Zheng等[10]对DP与PMP两种控制策略进行了比较,结果表明,两者最优SOC轨迹极为相似,燃料消耗量差距在0.5%以内,但PMP的计算用时比DP要少很多。尽管PMP可以通过离线迭代找到单工况下的最优协态变量,但对于其他工况不再适用,无法在线应用[11-12]。通过改变PMP的协态变量,为实时控制提供了可能。王哲等[13]以SOC作为反馈,利用PI控制器对协态变量进行实时更新。Li等[14]提出了一种改进的基于马尔可夫的速度预测方法,通过基于粒子群优化的支持向量机方法对驾驶模式进行在线识别并更新协态变量。
本文针对离线PMP无法实时在线应用的缺点,对PMP进行了有效的改进。首先,在哈密顿函数中增加了2个惩罚函数,其中一个惩罚函数用于减少燃料电池输出功率的频繁波动,这有助于延长燃料电池的使用寿命;另一个惩罚函数根据SOC调节燃料电池的输出功率,进而起到维持SOC的作用。其次,为了增加PMP的工况自适应性,协态变量按给定时间区间依据SOC反馈进行更新。最后,通过在不同工况下与LPEMS(linear programming-based energy management strategy)和A-ECMS(adaptive equivalent consumption minimum strategy)的仿真对比,验证了该能量管理策略的有效性。
1 燃料电池客车建模
1.1 动力总成模型
本文中燃料电池客车的动力源为燃料电池和动力电池,其动力系统结构如图1所示,主要包括燃料电池、动力电池、DC/DC变换器、电机控制器、电机及减速器等。其中:箭头表示能量流动方向;燃料电池用于提供稳定的输出功率;蓄电池起着削峰填谷的作用,不仅需要满足动力性要求,还需要回收客车制动能量,减少能量损失。

图1 燃料电池客车动力系统结构
对于给定速度的驾驶循环工况,客车需求功率为
(1)
式中:Preq为客车需求功率;F为客车所需驱动力;v为客车行驶速度;f为滚动阻力系数;m为客车质量;g为重力加速度;α为坡道角度;CD为风阻系数;A为车辆迎风面积;a为客车加速度。客车主要参数如表1所示。

表1 客车主要参数
1.2 燃料电池模型
本文中,燃料电池模型是通过燃料电池输出功率和效率的关系而建立的简化模型,燃料电池单位时间内的氢耗量为
(2)

1.3 动力电池模型
不考虑温度对动力电池的影响,采用Rint模型对动力电池进行建模,其等效电路如图3所示。
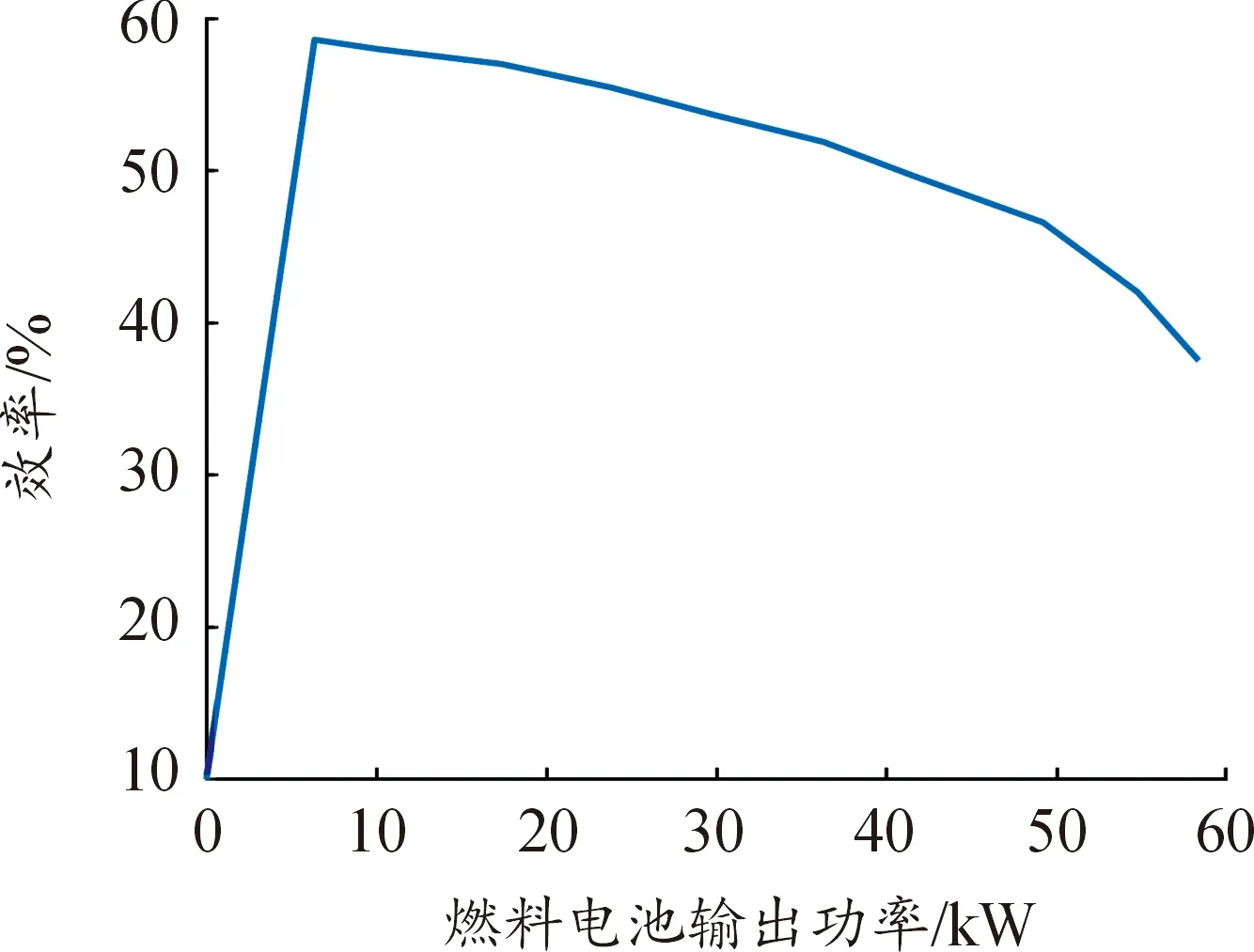
图2 燃料电池效率曲线

图3 Rint等效电路
根据等效电路,可得:
(3)
(4)
式中:Pb为电池输出功率;UOC为动力电池开路电压;R为电池内阻;Ib为电池输出电流。
SOC与电流的关系为
(5)
式中:Qmax为动力电池最大容量。
由式(4)和式(5)可为
(6)
动力电池由192个电池单体组成,每个电池单体的标称电压为3.65 V,因此动力电池的标称电压为700.8 V。电池单体开路电压UOC与SOC的关系曲线如图4,电池单体内阻R与SOC及工作模式(充电或放电)的关系曲线如图5。
1.4 电机模型
在驱动模式下,客车的驱动力由电机来提供,而在制动模式下,电机只回收部分制动能量,剩余制动力由制动器提供。如式(7)所示,当制动时车速大于10 km/h时,电机提供40%的制动力,当制动时车速小于10 km/h时,由于此时回收效率较低,电机不再回收制动能量,所有制动力均由制动器提供。
(7)
式中:n表示电机转速;Rw表示车轮半径;i表示传动比;T表示电机转矩。

图4 开路电压UOC与SOC的关系曲线

图5 内阻R与SOC及工作模式的关系曲线
电机在运行过程中会存在能量损失,本文根据电机效率图来计算电机的功率损耗[15],得到的电机功率损耗图如图6所示,由电机转矩T及电机转速n可直接插值得到电机损耗功率Ploss。
所以,电机实际消耗功率可表示为:

(8)
式中:Pd表示电机实际消耗的功率。

图6 电机功率损耗图
2 能量管理策略
2.1 LPEMS
LPEMS是一种离线最优能量管理策略,与DP相比,具有结果直观易于比较、计算所需时间短等优点[16]。LPEMS根据燃料电池效率曲线的凸特性,进而证明整车需求功率的平均值作为燃料电池输出功率时,燃料电池的氢耗量最小。考虑到动力电池充放电的能量损失,要使SOC最终值与SOC初始值相等,则需要对燃料电池输出功率进行修正。LPEMS下燃料电池输出功率为
(9)
式中:PLP为LPEMS下的燃料电池输出功率;Pavg为整车需求功率的平均值;ΔP为修正功率;t0为初始时刻;tf为最终时刻。
2.2 A-ECMS
A-ECMS每隔一段时间就通过SOC反馈对等效因子进行在线的自适应调整,进而起到维持SOC的效果[17]。等效因子为
(10)
式中:t=k·T0;k=2,3,…,t/T0;T0为时间间隔;Sk-1,Sk和Sk+1分别为第(k-1)次、第k次和第(k+1)次计算得到的等效因子;kP为可调参数;SOC*为目标SOC。
A-ECMS最优化模型可表示为:
(11)
同时,还需要考虑到电机以及燃料电池输出功率的限制:
(12)
式中:ωmax、Tmax分别为电机最大转速和最大转矩;Pfcmin、Pfcmax分别为燃料电池最小和最大输出功率。为了减少计算量以及防止燃料电池频繁波动,通过枚举法寻找最优解,对燃料电池输出功率范围以1 kW的网格宽度进行离散以寻找最优解。
2.3 基于PMP的自适应能量管理策略
2.3.1离线能量管理策略求解
对于燃料电池混合动力客车,优化目标就是使客车从初始时刻t0到最终时刻tf的氢气消耗最小化。本文选取燃料电池输出功率Pfc(t)为系统控制变量,动力电池SOC(t)为状态变量。性能指标为燃料电池从初始到结束总的氢耗量,性能指标表达式为
(13)
为满足客车动力性需求,燃料电池输出功率Pfc(t)和动力电池输出功率Pb(t)需满足
Pd(t)=Pfc(t)+Pb(t)
(14)
系统状态方程为:

(15)
为了防止动力电池出现过冲或者过放等情况,需要维持SOC在一定的合理范围之内,SOC应满足以下约束条件:
|SOC(t0)-SOC(tf)|≤ε
(16)
SOCmin≤SOC(t)≤SOCmax
(17)
式中:ε为一个非常小的正数;SOCmin、SOCmax分别为SOC所允许达到的最小值和最大值,为防止动力电池的过冲和过放,本文中分别取值为0.4和0.8。
考虑到燃料电池的特点,防止燃料电池频繁起停以及大幅变载等情况,燃料电池输出功率Pfc需满足以下约束条件:
Pfcmin≤Pfc(t)≤Pfcmax
(18)
(19)

由式(13)和(15)可定义哈密顿函数H:
(20)
式中:λ(t)为协态变量。
为了进一步减少燃料电池的频繁波动,增加惩罚函数为
L(Pfc(t))=a·(Pfc(t)-Pfc(t-1))2
(21)
式中:a为可调参数。
所以,哈密顿函数H重新定义为:
(22)
由PMP可知,如果式(13)中目标函数最小,则有以下必要条件:


(23)


(24)
(25)
式中:符号*表示最优轨迹。
由式(25)可得到最优燃料电池输出功率为
(26)
文中,由于SOC只在小范围内变化,可以认为动力电池内阻R以及开路电压Uoc与SOC无关,即有:
(27)
所以,协态变量λ(t)可以认为是一个常数。
考虑到文中燃料电池客车的实际情况,最大车速不应大于60 km/h,因此本文将驾驶工况以60 km/h为最大速度成比例地进行缩放。
对协态变量λ的取值进行离线迭代优化,由于动力电池容量较大,单个驾驶工况无法充分利用动力电池的容量,所以对单个驾驶工况叠加10次组成新的驾驶工况。不同驾驶工况下的协态变量λ与动力电池SOC的单调关系曲线如图7,其中ΔSOC=SOC(tf)-SOC(t0),本文SOC(t0)取值为0.6。从图中可以看出,对于不同的驾驶工况,随着协态变量λ的增大,SOC的最终值也会增大,即相对较小的协态变量倾向于减小SOC,而相对较大的协态变量倾向于增大SOC。而且对于不同驾驶工况,使得ΔSOC为0的协态变量也存在不同。
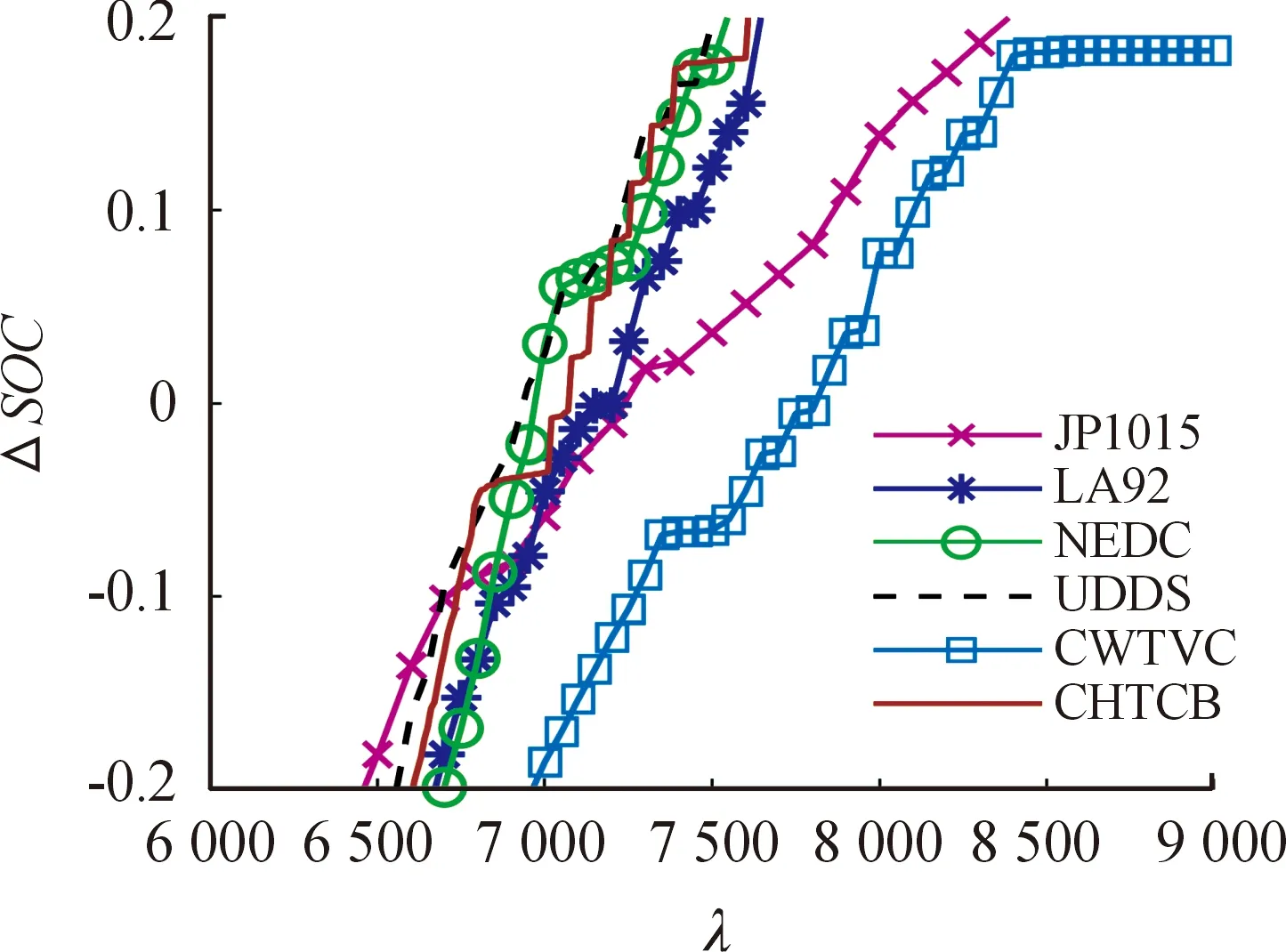
图7 ΔSOC与协态变量λ关系曲线
2.3.2自适应能量管理策略
由2.3.1节的结果可知,一种驾驶工况下恒定的协态变量很难对其他驾驶工况的SOC起到很好的维持效果,也不能保证燃料经济性,因此需要对PMP进行改进,使得能量管理策略对于不同驾驶工况都具有适应性。
考虑在哈密顿函数H中增加惩罚函数为
S(Pfc(t),SOC(t))=bPfc(t)(SOC(t)-SOC*)
(28)
式中:b为可调参数,SOC*为目标SOC。
所以,哈密顿函数H重新定义为:
(29)
为了降低协态变量λ取恒值的影响,提高对不同驾驶工况的自适应性,通过SOC对协态变量λ进行在线的自适应调整,为
λk+1=λk+cP·(SOC*-SOC(t))
(30)
式中:t=k·T;k=1,2,…,t/T;T为时间间隔;λk,λk+1分别为第k次、第(k+1)次计算得到的协态变量;cP为可调参数。
3 仿真及对比分析
为验证本文提出的基于PMP的自适应能量管理策略(A-PMP)的有效性,基于Matlab/Simulink平台,建立了整车后向仿真模型,并与LPEMS及A-ECMS进行对比分析。
3.1 等效氢耗
在相同工况下,由于不同能量管理策略得到的SOC存在不同,为了更好地比较不同能量管理策略的经济性,采用如下等效氢耗量进行比较:
(31)
式中:meq为等效氢耗;mH为实际氢耗;Ebat为动力电池消耗。具体表达式如下:
(32)
(33)
3.2 单个工况下仿真及对比分析
分别以CHTCB、NEDC和UDDS等驾驶工况作为测试工况,对单个驾驶工况都进行10次重复,以LPEMS作为离线最优参考,并与A-ECMS进行对比,得到3种工况下不同能量管理策略的燃料电池输出功率曲线和SOC变化曲线如图8—10。

图8 CHTCB工况仿真结果曲线

图9 NEDC工况仿真结果曲线

图10 UDDS工况仿真结果曲线
由以上仿真结果可知,对于单个驾驶工况,A-ECMS和本文提出的A-PMP策略都能使电池SOC维持在SOC目标值0.6附近波动,且一直不超过给定的SOC范围。当SOC偏离0.6时,这2种策略都能做出反应,通过改变燃料电池输出功率来有效维持SOC。同时还发现,与A-ECMS相比,A-PMP策略下的燃料电池输出功率波动更小,而且更接近LPEMS下离线最优燃料电池输出功率,尤其是在NEDC工况下的对比更为明显。燃料电池的变载次数如表2所示。

表2 单工况下不同策略的燃料电池变载次数及等效氢耗
由表2可以看出,在不同工况下,A-PMP的燃料电池变载次数比A-ECMS的都要少。由此可以说明,在单个驾驶工况下,本文提出的A-PMP策略比A-ECMS适应性更好,更有利于延长燃料电池寿命。
不同能量管理策略的等效氢耗在表2中列出,可以看出在不同工况下,A-PMP和A-ECMS的等效氢耗都与LPEMS下的等效氢耗很接近,对于单个驾驶工况,这2种策略都具有较好燃料经济性。
3.3 混合工况下仿真及对比分析
在实际驾驶过程中,路况往往是未知的,单一的驾驶工况不符合客车的实际驾驶要求。因此,本文将CHTCB、JP1015、LA92、NEDC、UDDS和CWTVC等工况先各自重复10次,然后再组合起来形成一个混合工况,通过该混合工况来检验本文提出的A-PMP策略的工况适应性情况。
不同策略下的燃料电池输出功率曲线如图11,其中PMP策略协态变量λ取恒定值7 000。可以看出,A-ECMS下的燃料电池输出功率波动较大,PMP策略下的燃料电池输出功率由于λ取恒定值的原因基本保持不变,而A-PMP策略下的燃料电池输出功率基本上在LPEMS下离线最优燃料电池输出功率附近变化,能够随着工况的变化自适应调节输出功率。燃料电池的变载次数在表3中列出,A-PMP的燃料电池变载次数不到A-ECMS变载次数的一半,更有利于延长燃料电池使用寿命。

图11 燃料电池输出功率曲线

表3 混合工况下不同策略的燃料电池变载次数 及等效氢耗
SOC变化如图12所示,可以看出, A-ECMS和PMP策略下的SOC波动非常大,甚至超出了SOC的约束范围,对SOC的维持效果较差,不利于动力电池的使用寿命,而A-PMP策略下的SOC仅在0.6附近小范围波动,对SOC的维持效果较好。

图12 电池SOC曲线
A-PMP的协态变量λ和A-ECMS的等效因子S随着时间的变化曲线如图13。可以发现,A-PMP的协态变量随着时间的增加趋向于稳定,而A-ECMS的等效因子随着时间增加而波动得更加剧烈。因此,在混合驾驶工况下,与A-ECMS相比,本文提出的A-PMP策略对工况的适应性更好。

图13 协态变量λ和等效因子S的变化曲线
等效氢耗在表4中列出。与离线最优LPEMS的等效氢耗相比,本文提出的A-PMP策略的等效氢耗仅增加了0.48%,考虑到对复杂多变的驾驶工况的优良的适应性,这是非常低的等效氢耗。PMP策略的等效氢耗增加了0.83%,但工况适应性较差,而A-ECMS的等效氢耗增加了2.65%,在混合工况下的燃料经济性较差。
4 结论
针对一种燃料电池混合动力客车,设计了一种基于PMP的在线自适应能量管理策略,在降低系统等效氢耗的同时,减少了燃料电池输出功率的波动,有利于延长燃料电池使用寿命。
1) 对燃料电池客车的能量管理问题进行了离线求解,发现SOC随着协态变量的增大而升高。
2) 对PMP进行了改进,提出了A-PMP,实现了能量管理的在线自适应控制。通过与LPEMS和A-ECMS比较,发现在单个工况下,本文提出的A-PMP策略与A-ECMS都与离线能量管理策略LPEMS性能接近,具有较好的适应性。在混合工况下,本文提出的A-PMP控制策略的适应性比A-ECMS好,燃料电池输出功率变载次数少,等效氢耗低,而且A-PMP与离线控制策略LPEMS几乎具有相同的燃料经济性。
