载重卡车对驮背运输车运行平稳性影响分析
2022-06-11魏洪亮李晓峰
魏洪亮,李晓峰
(1.中车齐齐哈尔车辆有限公司,黑龙江 齐齐哈尔 161000;2.大连交通大学 交通运输工程学院,辽宁 大连 116028)
近年来,随着我国铁路货运载重与速度的不断提高,货运列车在轨道不平顺激励下运行的平稳性问题越发受到关注.驮背运输车作为公铁联运的重要载体,在我国发展历程尚短,其中货运列车较为复杂,需要考虑载重卡车与列车之间振动耦合作用影响.开展驮背运输车振动特性分析,对确保列车正常运行及后续改进具有重要意义.
目前,已有众多国内外学者针对列车平稳性问题进行大量研究:曹辉等[1]视车体为两端自由均质等截面欧拉-伯努利梁,建立考虑车体弹性的高速列车垂向刚柔耦合动力学模型,在频域内研究弹性效应下的振动特性及其传递关系.邹逸鹏等[2]通过建立高速磁浮列车的垂向动力学模型,开展行驶速度、轨道不平顺波长、车重和悬浮架重以及一二系悬挂参数对于平稳影响研究.赵家舵[3]采用虚拟激励法和辛数学方法建立虚拟简谐载荷作用下车辆-轨道耦合系统的低自由度运动方程,并进行平稳性指标优化.颜永风等[4]基于多体动力学仿真分析了减振器阻尼系数和弹簧垂向刚度对跨座式单轨游览车运行平稳性影响,并为减振器阻尼系数和弹簧垂向刚度的选取提供了依据.姜雪娇等[5]采用在系统外将车体柔性化的建模方法建立C80B型敞车刚-柔耦合动力学模型,并进行动力学性能仿真计算.汪群生等[6]提出一种非线性动力学仿真模型的建立方法,并仿真得到两类铰接式列车在不同工况下的动力学参数.张文龙等[7]利用仿真手段分析了30 t轴重货车的动力学性能.陈雷等[8]对120 km/h货车动力学性能进行了全面比较分析.Sergio M等[9]提出了车辆-轨道耦合动力学模型的建立方法,并对某型车辆运行稳定性进行动力学分析及试验研究.Dumitriu M等[10]对轨道不平顺条件下铁路车辆运行稳定性进行了研究,通过仿真获得了某型铁路车辆一级悬架横向刚度和二级悬架横向阻尼最佳值.Schupp G等[11]提出了一种计算铁道车辆非线性临界速度的方法,并对车辆系统稳定性和分岔特性进行研究.
从以上文献可以看出,目前轨道车辆动力学系统大多采用将模型大幅度简化的多体动力学体系进行随机振动仿真计算[12-13],对于定量预测车辆结构的随机振动分布尚难以实现,只能在样机造出之后,通过现场测试得到相关数据,周期长、消耗大.对于驮背运输车的研究在我国尚处于起步阶段,可利用和参考的数据不多,特别是与公路半挂车的协同研究还相对较少.因此,本文将有限元法与随机振动的高效算法(虚拟激励法[14-15])结合,提出一种适用于驮背运输车的随机振动分析法,并利用该方法对载重卡车引起的车辆在空、重车工况120 km/h运行速度下各子结构横向和垂向加速度功率谱及运行平稳性进行分析.该方法不必对轨道车辆结构做太多简化,可直接采用有限元法建模,以有限元自由度作为随机分析自由度进行随机振动求解,进而解决传统动力学分析计算效率低下的问题.
1 核心算法
1.1 动力学模型建立方法
模型直接采用有限单元法建模,由于驮背运输车辆主体结构和附加结构刚度差别较大,有效模态低频区段不统一,现分别对主体结构和附加结构在各自的低频段实施振型分解,然后将各部件通过耦合关系联成一体,既可以保证有效频率范围,又最大限度提高计算效率.
驮背车各子结构有限元动力学方程为:
(1)

考虑车辆系统在运行过程中受到多点完全相干平稳随机激励,建立驮背运输车辆系统各子结构的有限元动力学方程组:
(2)
式中,下标c、t、b、w、v、r分别表示车体、中部底架、构架、轮对、卡车及轨道.利用各子部件模态矩阵对式(2)进行降阶,最终驮背运输车辆系统各子部件动力学方程组转换成模态坐标下动力学方程组如式(3)所示:
(3)
式中,u*为轨道不平顺.式(3)简写为如下形式:
(4)
1.2 虚拟激励法的应用
利用虚拟激励法,可以将轨道不平顺在指定离散频点上转换为简谐激励,其中式(4)的轨道不平顺u*,就可以假设为式(5)所示的形式:
(5)
式中,Sj(ω)为轨道不平顺功率谱,其中j分别代表了垂向、横向的轨距不平顺,ω是激励的频点,t=[t1,t2,…,t8]是驮背运输车8个轮对先后经过激励点的时延矢量,与各轮对之间距离和运行速度有关.结合式(4)和式(5),可得到虚拟激励作用下的虚拟响应:
(6)
式中,H(ω)=(-ω2MX+iωCX+KX)-1是系统的频响函数,I是指示矩阵.进而得到节点位移功率谱和加速度功率谱:
(7)
1.3 运行平稳性评价方法
我国铁路采用Sperling平稳性指标进行车体的平稳性评价.如果随机响应的上、下截止频率为fu和fl,Δf=(fu-fl)/N,采样频率fk,其中N为采样数.
fk=fl+(k-0.5)Δf,(k=1,2,…,N)
(8)
频率成分fk的振动加速度幅值:
(9)
代入Sperling平稳性指标中可得:
(10)
式中,F(fk)为频率修正系数,Sa为加速度功率谱,fk为加速度功率谱对应频率.对货车而言,平稳性指标小于3.5时等级为优,在3.5~4.0时等级为良好.
2 运行平稳性影响分析
2.1 工况介绍
本文在对铰接式驮背运输车进行基于美国6级谱随机激励作用下整车系统动力学分析的基础上,进一步探究载重卡车对车辆平稳性影响.其工况主要由空车工况和重车工况两种组成.空车工况时,驮背车不装载装置;重车工况时,驮背车装载一辆公路厢式货车,货车及货物总重量为49±2 t.由于高速状态下列车的振动特性能够反应列车系统的主要振动特征,因此本文针对驮背车在最高运行速度120 km/h下的工况进行平稳性分析.
2.2 分析结果
2.2.1 车体凹底架
图1为车体凹底架结构路径选取示意图.选取沿车体纵向的3条路径上的全部 节 点, 分 别 为凹底架中间、下侧边和侧梁上端.按照所选取的路径分别分析载重卡车对驮背车车体端部底架的动力学行为影响.

图1 凹底架路径选取示意图
表1为车体在空、重车工况120 km/h运行速度下横向、垂向加速度功率谱与平稳性指标最大值比较结果.从表中可知,在横向上,同路径在空、重车工况下功率谱分布及最大值差别较大,其中路径2的重车工况的功率谱最大值相较于空车工况减少83.8%(如图2(a)),重车工况的横向加速度功率谱相较于空车工况有较大幅度降低.在垂向上, 路 径 2 和 3 在 重 车 工况下功率谱最 大 值大于空车工况的最大值,最大达13.0%(如图2(b)),其峰值主要分布在18 Hz附近,且集中在结构中间.

表1 不同工况加速度功率谱及平稳性指标最大值

(a) 凹底架路径2横向功率谱
图3为车体凹底架运行平稳性图.从图中可知,在横向上,重车工况平稳性指标均在空车工况之下.虽然路径1和路径2重车工况加速度功率谱最大值相较于空车工况有较大幅度下降,但横向平稳性指标变化不大.路径3的重车工况在前15 m横向平稳性指标小于空车工况,之后逐渐大于空车工况.49 t载重卡车使驮背车车体凹底架下端和侧梁横向振动有一定幅度减小,使凹底架尾部有一定幅度增大.垂向上,虽然路径2和路径3重车工况的垂向加速度功率谱最大值大于空车工况,但凹底架3条路径重车工况的垂向运行平稳性指标整体小于空车工况.
(a)路径1
2.2.2 车体端部底架
图4为车体端部底架路径选取示意图.选取路径1为端部底架上盖板沿纵向选取的一列节点,路径2为端部底架中间位置沿横向选 取 的 一列节点.按照所选取的路径分别分析载重卡车对驮背车车体端部底架动力学行为影响.

图4 端部底架路径示意图
表2为端部底架加速度功率谱及运行平稳性指标最大值信息表.从表中可知,在横向上,重车工况下路径1在头部区域12 Hz附近有加速度功率谱峰值出现,之后沿路径向尾部峰值逐渐减小,在尾部区域无明显峰值(如图5(a)),而路径2分布均匀,无明显衰减现象.重车工况横向加速度功率谱最大值均大于空车工况,其中路径1大幅高出126.3%, 路径2也高出22.2%.在垂向上, 空车工况路径1和路径2加速度功率谱在3 Hz附近峰值均沿纵向均匀分布,路径1重车工况与空车工况垂向加速度功率谱最大值相差约2.0%, 而 路 径2则达到-34%(如图5(b)),重车工况大幅小于空车工况.路径2重车工况垂向加速度功率谱在18 Hz附近位于两端区域有峰值出现,而在中间区域无明显峰值出现,说明载重卡车会引起驮背车车体端部底架纵向中部两端区域高频垂向振动.
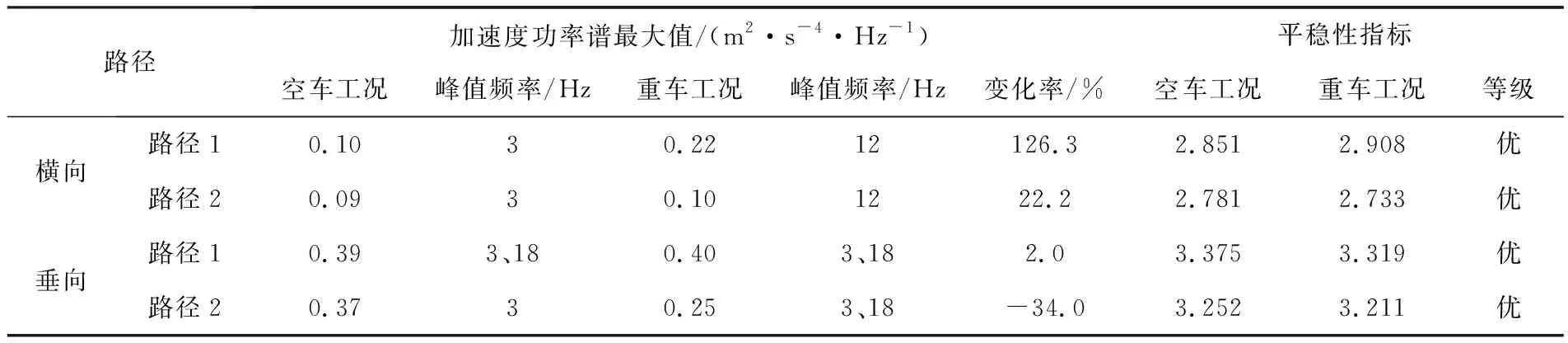
表2 端部底架加速度功率谱及运行平稳性最大值

(a)端底架路径1横向功率谱
图6为端部底架在横向和垂向上平稳性比较结果.从图中可知,在横向上,虽然路径1重车工况横向加速度功率谱最大值大幅高于空车工况,但其横向平稳性指标仅在头部区域高于空车工况,1 m之后区域逐渐小于空车工况横向平稳性指标.在垂向上,车体端部底架两条路径重车工况运行平稳性指标整体小于空车工况,其中,路径1空、重车垂向运行平稳性在头部区域相差较小,越靠近尾部相差较大,而路径2在两端相差较小,在中间相差较大.

(a) 路径1
2.2.3 车体中部底架
图7为车体中部底架路径选取示意图.选取路径1为中部底架上盖板中间沿纵向选取一列节点,路径2为中部底架中间沿横向选取一列节点.按照所选取路径分别分析载重卡车对驮背车车体端部底架动力学行为影响.

图7 中部底架路径示意图
表3为中部底架加速度功率谱及运行平稳性指标最大值信息.从中可知,在横向上,空车工况路径1和路径2横向加速度功率谱峰值出现在17 Hz附近,在3 Hz和11 Hz附近也有小峰值出现.重车工况下路径1和路径2功率谱峰值仅在17 Hz附近出现峰值.重车工况横向加速度功率谱最大值均远大于空车工况,分别高出896.7%和876.9%(如图8(a)).在垂向上,路径1空车工况和重车工况垂向加速度功率谱峰值均集中在19 Hz附近,路径两端在21 Hz附近有峰值出现(如图8(b)).路径2垂向加速度功率谱峰值也均主要集中在19 Hz附近,且沿路径各节点加速度功率谱基本无变化.路径1和路径2重车工况垂向加速度功率谱最大值均高于空车工况最大值,增幅分别为17.7%和15.9%.
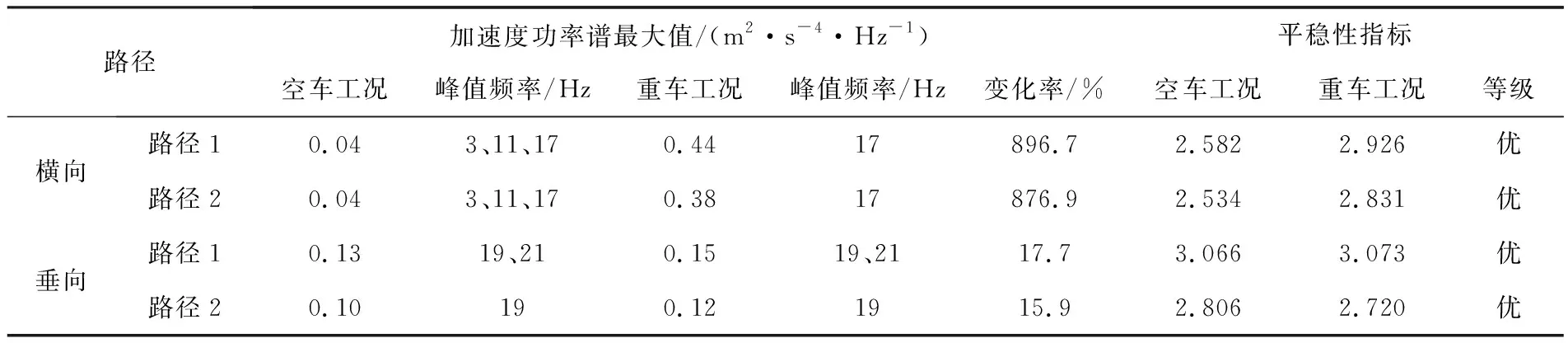
表3 中部底架加速度功率谱及运行平稳性最大值
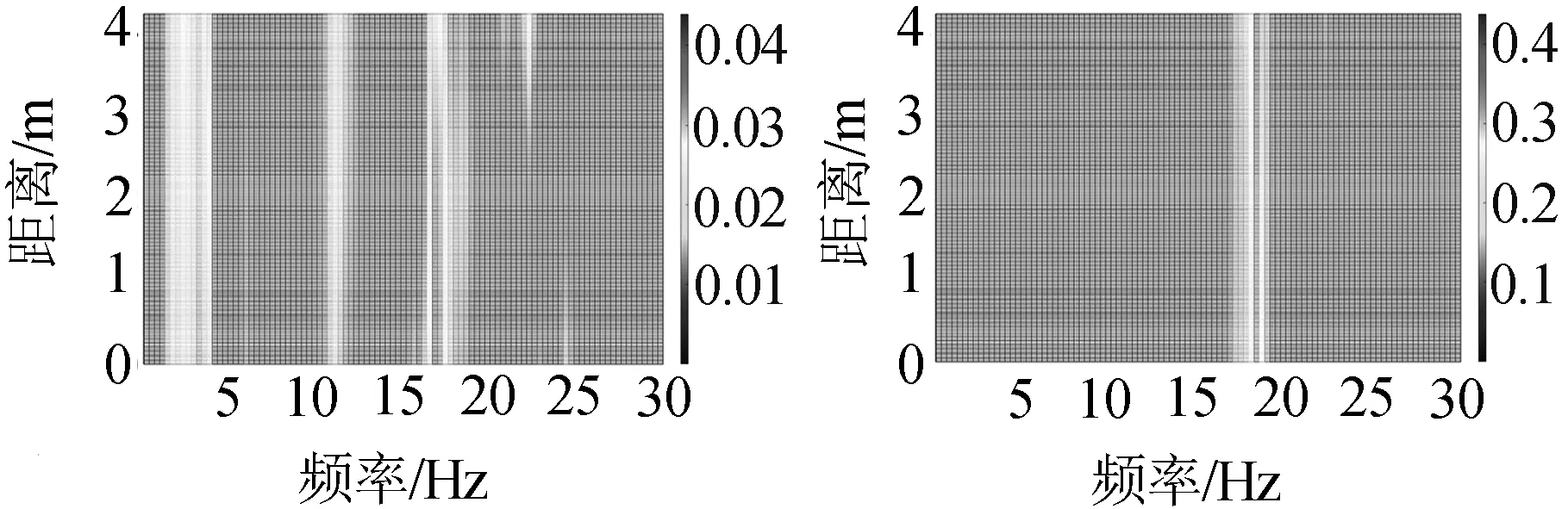
(a) 中底架路径1横向功率谱
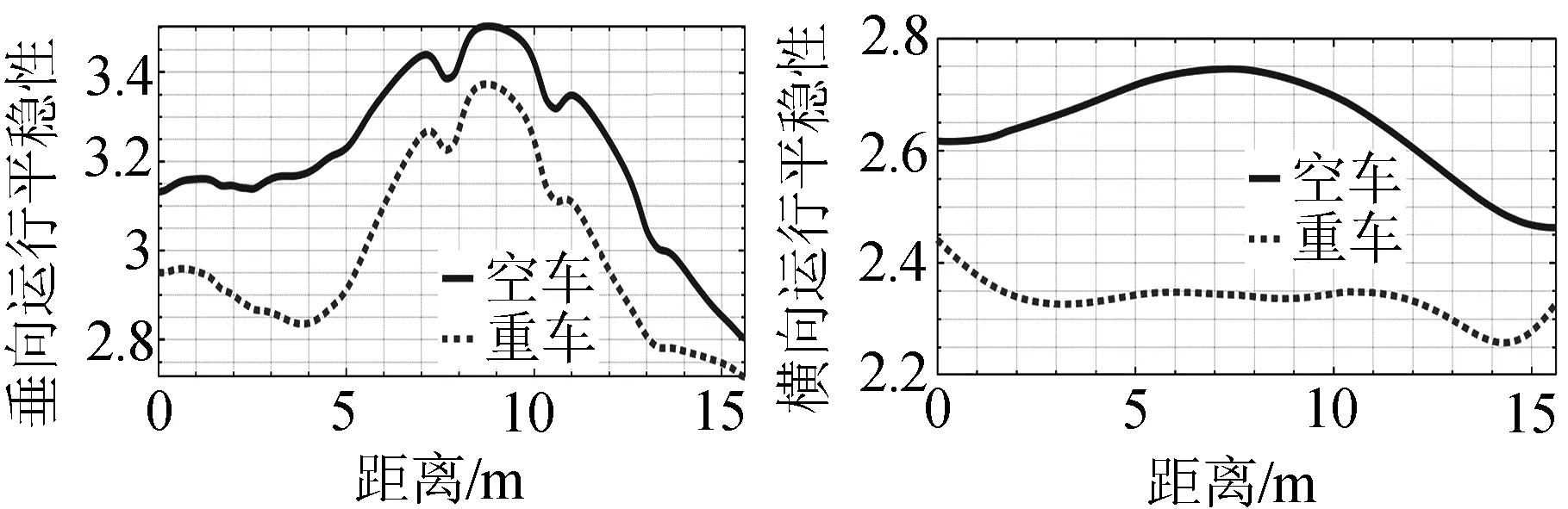
图9为中部底架在横向和垂向上平稳性比较结果.图中可知,在横向上,重车工况中部底架路径1和路径2运行平稳性与空车工况基本保持一致,均呈一条直线,横向平稳性指标均处于相同水平,说明中部底架横向振动以刚体横向振动为主,且路径1和路径2的重车工况横向平稳性指标整体大于空车工况.在垂向上,重车工况下路径1垂向平稳性指标在两端与空车工况基本相同,从路径两端向中间逐步小于空车工况.
3 结论
本文以驮背运输车为研究对象,将有限元法与虚拟激励法相结合,提出一种随机振动分析方法,并利用该方法分析120 km/h速度下49 t载重卡车对驮背车运行平稳性影响,得到如下结论:
(1)载重卡车使驮背车凹底架下端和侧梁的横向及垂向振动均有一定幅度减小,使凹底架尾部横向振动有一定幅度增大.横向平稳性指标最大值为3.425,处于凹底架边梁上部,等级为良好.垂向平稳性指标最大值为3.373,处于凹底架下端,等级为良好.整体横向和垂向平稳性均优于空车工况;
(2)载重卡车将使驮背车端部底架头部区域12 Hz附近横向振动和纵向两端区域18 Hz附近垂向振动加剧,横向与垂向平稳性指标最大值分别为2.908和3.319,发生位置均处于端底架中部纵向区域,等级均为优.重车工况下,仅横向平稳性指标在头部区域略高于空车工况(约2%),其他区域横向和垂向平稳性均优于空车工况;
(3)载重卡车使驮背车中部底架横向和垂向振动能量峰值均大于空车工况,最大差值达896.7%,发生于中部底架上盖板沿纵向方向17 Hz附近.重车工况横向平稳性指标整体大于空车,最大值为2.926,位于中底架纵向区域,垂向平稳性指标在两端与空车大致相同,最大值为3.073,位于中底架纵向区域.横向和垂向平稳性等级均为优.
