GNSS打桩系统在海洋工程施工测量中的应用*
2022-06-01刘金磊李允良
刘金磊,李允良
(1.江苏海洋大学 海洋技术与测绘学院,江苏 连云港 222005;2.上海瞰沃科技有限公司,上海 201400)
0 引言
在码头、港口以及大型跨江、跨海桥梁工程的建设过程中,打桩定位是必不可少的一个重要环节。在GNSS(global navigation satellite system)尚未成熟地应用到打桩定位的时候,主要是使用全站仪交会等方法来确定桩的方位和坐标[1]。随着GNSS定位技术越来越成熟,近年来基于GNSS技术和RTK技术的打桩定位模型设计方法在我国已经得到了突破性的发展和普及。GNSS打桩系统通过两台架设于桩船支撑架顶端的GNSS接收机接收定位信息实时量测船体的坐标及方位角,再通过安置设备对船体姿态进行观测及初步调整,并将最终实测姿态数据传输至电脑,从而推算出桩体实测坐标[2]。王兵海[3]在工程中合理计算转换参数,并在硬件配置上作出改进,提高了打桩精度。宋超[4]主要研究了动态精度检测的数据处理原理、动态精度检测的误差来源以及处理方法。陈士清[5]介绍了星站差分的基本原理和OmniSTAR技术的4种服务达到的精度,采用OmniSTAR技术对现有打桩船测量定位系统进行技术改进,最后通过海上测风塔桩基工程实例,展示了星站差分GNSS在远海施工测量中的应用。梁峰[6]、易志华[7]分别进行了高桩桩基工程施工测量研究与探讨以及水上沉桩中的桩位偏差分析与控制。打桩的一般流程为:移船取桩,定位收紧缆绳使桩自沉,再测出桩偏位,再次调整船的位置,继续测桩偏位,最后开始锤击,达到停锤标准后停锤,测出最终桩偏位[8-12]。陈世安[13]详细推算了GNSS远距离打桩定位坐标系统之间的相互转换。
本文首先推算了GNSS数据与桩中坐标的转换关系,综合考虑多种误差影响,估算出GNSS打桩系统的误差;其次结合东营10万t级油品化工泊位实际工程案例中的实测数据,分析实际施工误差过大的原因,并提出解决方案,确保以后的施工精度。
1 打桩船简介
桩船是指用于水上打桩作业的船只,船体为钢箱型结构,在甲板的端部装有打桩架,可前俯后仰以适应施打斜桩的需要。桩架可绕其前支点做俯仰动作,俯仰角一般为18.5°~35°。
打桩船打桩架的4个位置状态如图1所示。停留在位置1时,打桩船处于休息停止作业阶段。处于位置2范围时,打桩方式称为仰角打桩,简称仰打。处于位置3时,打桩方式称为直角打桩,简称直打。位置4称为俯角打桩,简称俯打。后文将仰打和俯打统称为斜打。
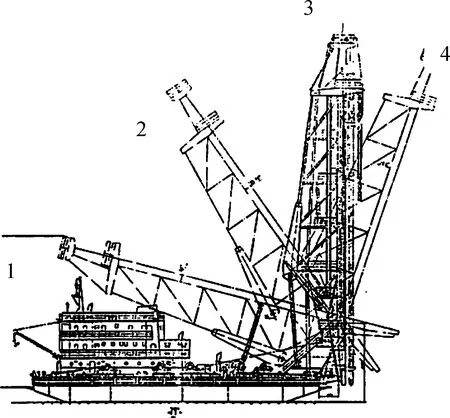
图1 打桩船打桩架示意图
2 桩中心坐标的推算
如图2所示,将两台测距仪按平行于x轴方向且与x轴对称的位置安置。两测距仪与桩表面的测点分别为 A和B 两点,测得距离分别为L1和L2。则测点A和B坐标可分别按下面的式子进行。
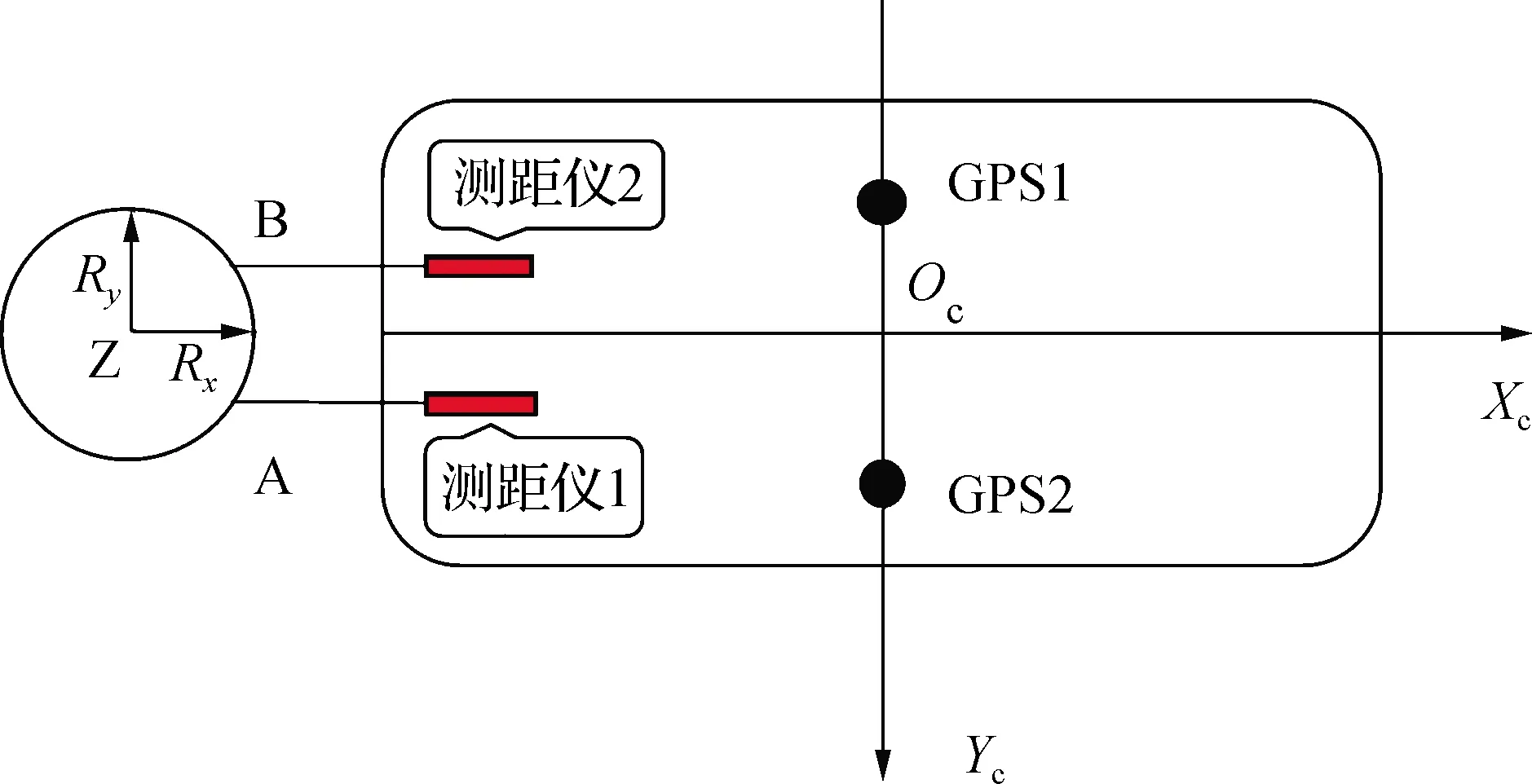
图2 打圆桩时仪器安装图
XA=Xd1-L1,
(1)
YA=Yd1,
(2)
XB=Xd2-L2,
(3)
YB=Yd2。
(4)
设Xd为测距仪的纵坐标,Yd为测距仪的横坐标,桩的半径为r,Z为桩心位置,桩心位置Z沿x轴和y轴方向到桩表面的距离分别为Rx和Ry。
(1)直桩情况下的桩中坐标计算。
ΔXAB=XB-XA,
(5)
ΔYAB=YB-YA,
(6)
(7)
则桩中坐标按如下公式进行计算:
(8)
(9)
(2)斜桩情况下的桩中坐标计算。
圆桩斜桩的水平截面为一椭圆,其短半径与桩半径r相同,长半径与桩的倾斜坡度有关,计算公式如下:
(10)

斜桩情况下的桩中坐标的计算公式推算如下。由椭圆方程得
(11)
(12)
将式(11)(12)两式相减得
(13)
在式(13)中求解XZ,并注意到YA=-YB,故有
(14)

将式(14)代入式(11)和式(12)得
(15)
经整理得
(16)
式中
(17)
最终解得
(18)
取XZ1或XZ2中小于XA或XB,且二者中较小的一组解作为最终解。若取XZ1和XZ2都小于XA或XB时,取XZ1和XZ2中的较小者为最终解。
3 GNSS打桩定位系统定位精度估算
GNSS打桩定位系统的误差包括桩中平面位置的定位和桩顶标高测定两部分。其中,影响桩中平面定位精度的误差源主要有:① GNSS定位的平面精度;② “精密定位”模式下的水平测距仪的测距误差;③ 桩中测点高度与桩顶设计标高不在同一标高上时,由斜桩的坡比误差引起的桩中位置改正误差。因实际打桩过程中,桩体分为圆桩和方桩,此项误差可分为方桩和圆桩两种情况。计算此误差需确定安装在打桩船上测距仪的型号。在“精密定位”模式下对桩中心平面位置精度进行如下估算。
(1)由 GNSS1和GNSS2 位置误差引起的桩中水平位置误差。
当参考站距离小于10 km 时,GNSS1和GNSS2 的相对平面位置误差优于0.01 m。由于船体本身为钢体,因此,由两台GNSS引起的船体坐标系x轴方向的位置误差Dxg与两台GNSS中点(船体坐标系的原点)的误差相同,即
(19)
(2)由GNSS1至GNSS2方向误差引起的桩中水平位置误差。
仍考虑GNSS1至GNSS2的相对平面位置误差不大于 0.01 m,取GNSS1至GNSS2的距离为SG。则GNSS1至GNSS2的方向误差为
(20)
设两GNSS的中点(平均位置)至桩中的距离为SZ,则由GNSS1至GNSS2方向引起的桩位置垂直于船轴方向的误差Dyg为
(21)
(3)水平测距仪测距误差引起的桩中水平位置误差。
实际打桩过程中,此项误差分为方桩和圆桩两种情况,计算时需确定测距仪的型号。本文采用测距仪型号为徕卡Disto测距仪,其测量精度为3 mm,即为mxA=mxB=0.003 m。
在圆桩情况下,桩中坐标(XZ,YZ)的计算是通过两台测距仪的测点坐标(XA,YA)和(XB,YB)来进行的,即
(22)
由于两台测距仪固定安装,测距方向也固定,因此YA和YB为常数。故由上式微分得到
(23)
(24)
考虑到在“精密定位”模式下,桩中接近设计位置时,即有以下近似关系式:XA=XB,YA=-YB,YZ=0。进一步忽略R与r的差异,即认为R=r。则可以解出
(25)
(26)
根据误差传播定律,并考虑到XA与XB精度相等,且与测距仪测距精度相等,即有mxA=mxB=0.003 m,故可得
(27)
(28)
(4)由坡比误差引起的测点处桩中位置向设计桩中位置改正的误差。
由于测点的高度与设计桩顶高度不同,需要将测点处的桩中位置归算到设计桩顶标高处的桩中位置,在归算时,坡比误差可引起归算误差。
设坡比误差为mp,测点处的高程与设计桩顶高差为ΔH,则归算误差的计算式mxp为
mxp=ΔH·cosmp。
(29)
此项误差仅在船体坐标的x轴分量上存在,y轴分量上的影响为零。在实际打桩时,一般有mp≤15′,ΔH≤5 m,则mxp≤0.02 m。
(5)综合影响计算。
综合以上各项误差影响,取各项误差的最大值作为最大误差的估计值,可以得到桩顶误差的最大值为
mx=0.007+0.005+0.022=0.034(m),my=0.020+0.005=0.025(m)。
其中mx为图2中Xc方向上误差的累加,my为图2中Yc方向上误差的累加。
4 实例分析
东营港区北防波堤10万t级5号、6号油品化工泊位工程是当前东营市港产城融合发展推进的6个重点项目之一,也是万达集团与山东省港口集团合作建设项目。该工程位于东营港区北防波堤南侧,宝港国际已建3号、4号泊位东侧。本工程码头通过一座长1 180.5 m、宽15 m的引桥与管廊通道工程引桥连接。码头岸线总长729 m,5号、6号泊位分别使用373 m和356 m,码头用海面积31.64 hm2。5号泊位为液化烃专用泊位,6号泊位为液体化工品及油品泊位。项目所采用的圆桩是长度为44.8 m、直径为1.2 m的后张法预应力大管桩。图3为该工程施工CAD图纸。表1为图3c中部分点位的具体信息。

a 引桥桥墩
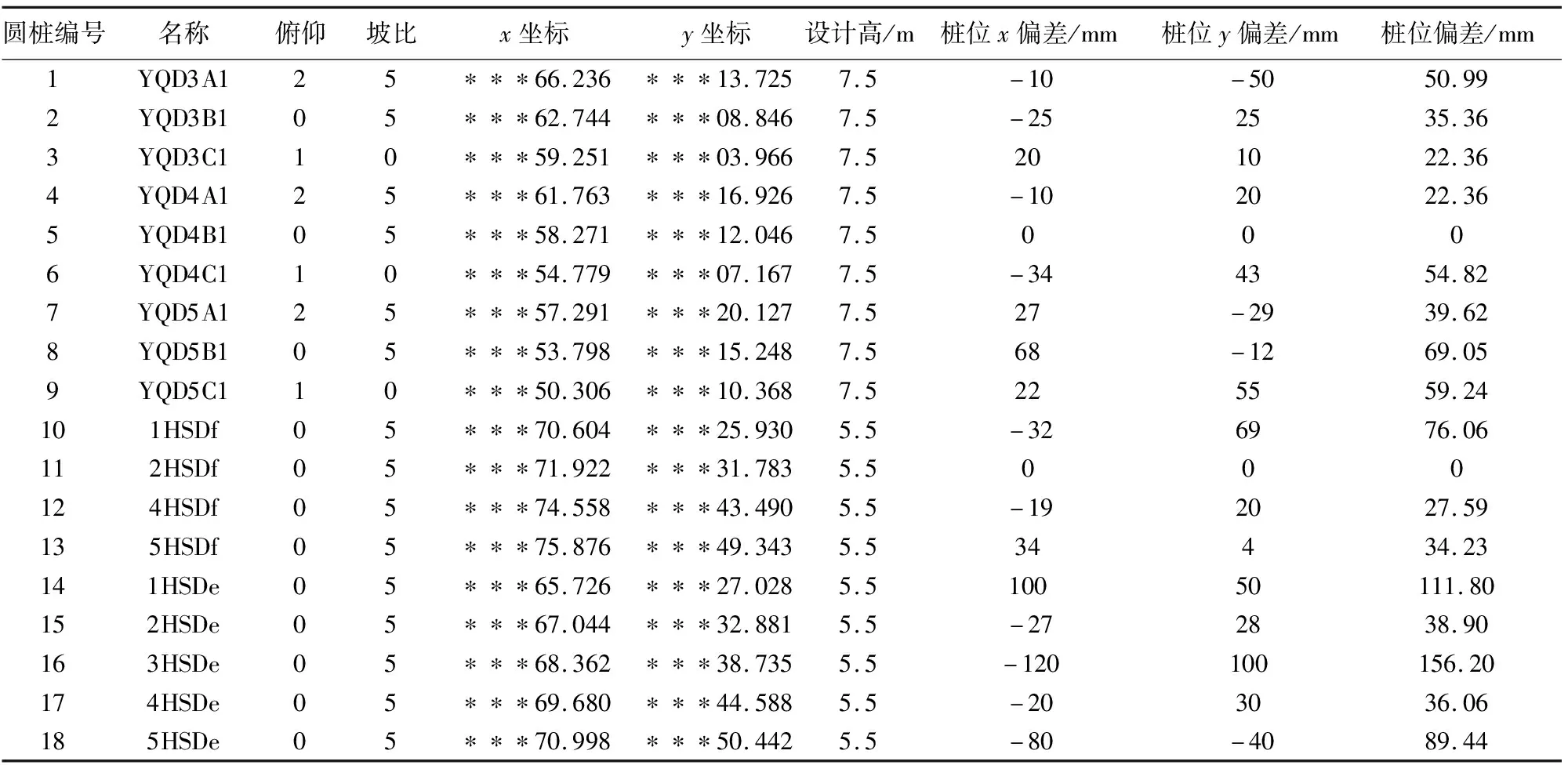
表1 点位信息
由图4可知:桩偏位x限差为0.034 m,符合的桩数为14根,占比为78%;桩偏位y限差为0.025 m,符合的桩数为8根,占比为44%;桩位偏差限差为0.042 m,符合的桩数为10根。桩位偏差符合要求的占比为55%,占比偏低,其原因可能是,此次施工船长40 m左右,宽25 m左右,而架设在船上的两个GNSS间距约为5 m,且垂直于船的中线,平行于宽。两个GNSS间距与船长和船宽相差太大,导致有时无法准确地反映出船的姿态调整。

图4 各点施工精度
此问题的解决方案如下:一是可以通过增加第3个GNSS来增加数据计算的准确性;二是在不产生数据传输延迟的前提下,尽量加大3个GNSS间的距离,缩小两个GNSS间距与船长和船宽差值。具体GNSS铺设位置如图5所示。
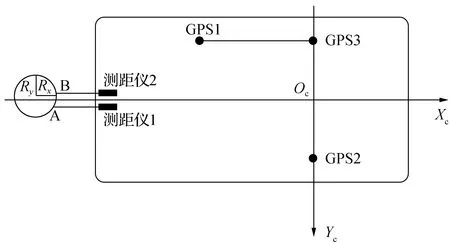
图5 改进后GNSS安装效果图
编号16桩的桩位x偏差为120 mm,桩位y偏差为100 mm,平面位置偏差为156 mm。导致偏差的原因主要是:没有合理安排施工顺序,先打了编号为17和18的桩,导致船无法按设计平面扭角将桩放置到设计坐标,产生了较大的误差,如图6所示。因此在施工前,要提前规划好桩位的施工顺序,避免人为失误产生误差。

图6 施工模拟图
在实际施工中效果却不理想,导致此结果的外界原因可能有以下两方面。
(1)在海上打桩使用的打桩船,为了保持稳定,需要抛锚。但是船不可能像吊车在陆地上时一样稳定,必然会随着海浪晃动,这就导致本来桩已经移动到限差范围内,但在下桩的瞬间发生了变化,导致位置发生偏移。
(2)项目采用的是长为44.8 m、宽为1.2 m的钢筋水泥混凝土管,水泥管的重量大,导致打桩船在下放桩体的瞬间,船会因为浮力和自身重量的改变,向后退。因此当打桩船带着桩体到达设计位置时,船长一般会事先预留出船后退(或者向前)的距离,此距离全靠船长依据经验把控。
5 结语
本文对GNSS与实时船体坐标系统的桩中心坐标推算,推算出“精密定位”模式下Xc方向上误差累加为0.034 m,Yc方向上误差累加为0.025 m,位置误差为0.042 m。结合工程实例,在船上仪器工作正常情况下,施工误差偏大的主要原因是由环境因素和人为操作造成的。提出了首先要提前安排施工顺序,避免出现阻挡问题,其次建议增加第3个GNSS来增加稳定性提高精度,有望将桩位偏差符合要求的桩数占比提高到70%。而如何消除海浪和浮力等环境影响因素带来的位移偏差影响还需进一步研究。