基于车载激光扫描系统生成正射影像的应用*
2022-06-01葛策文王留召焦明连张攀科
葛策文,王留召,焦明连,张攀科
(1.江苏海洋大学 海洋技术与测绘学院,江苏 连云港 222005;2.北京四维远见信息技术有限公司,北京 100039)
城市交通系统的现代化与智能化发展,对高精地图精度要求更加严格。传统作业方式如全站仪测量,无法提供完整的路面信息,只能提供特征信息,且工作效率低。而航空影像虽完整且提取效率高,但同样很难满足高精地图的绘制和无人驾驶所需路面精度。
近10年来,不同学者从不同的角度出发,针对提高遥感正射影像的精度问题进行制作与研究,并提出很多不同的思路和方法。文献[1]通过卫星高分辨率数字正射影像图,及时、全面掌握武汉市地表变化最新信息,可作为地图分析背景控制信息,为国土资源调查、灾害防治和国民经济建设规划等提供可靠依据。然而,在实验中检查点最大误差3 m,不能满足重建高精度路面信息要求。文献[2]有效利用无人机技术获取地面数字正射影像数据,再通过机载激光雷达获取植被覆盖下的LiDAR点云数据,将二者结合,不仅能获取正射影像信息,还能获得高程信息。但是由于城市道路地形复杂,很多树木等植被覆盖导致LiDAR点云数据不能完整呈现路面高程信息,机载正射影像系统难以应用于道路正射影像中。文献[3]提出利用车载系统使用逆透视变换转换正射影像地图碎片,通过加权中值算法进行融合形成完整地图,精度较高。然而,此方法没有有效解决图像中的道路扭曲细节,也没有完整呈现路面高程状态。文献[4]通过车载激光扫描系统对道路点云进行DEM制作,完成对路面高程数据的呈现,然而路面DEM并没有融入影像数据,不能完全还原路面信息。文献[5]基于LiDAR点云数据,采用无地面控制空中三角测量方法对影像数据进行正射纠正,以此得到正射影像,最后利用TerraSolid软件制作的正射影像具有较高的几何精度和较好的视觉效果。然而,此种DOM制作方法难以在建筑密集的城市中制作道路正射影像。文献[6]提出了一种基于车载多摄像头的道路正射影像地图创建方法,通过该方法可以实现高分辨率的道路正射影像地图创建。然而,此方法没有结合DEM生成真正射影像。
针对卫星正射影像精度不高、无人机正射影像反映道路信息不完整、传统方法摄像头视野有限的问题[7],本文构建了一种车载多摄像头采集系统。该系统相对于全景相机采集系统更适合于道路环境,利用三维激光扫描技术通过将正射影像投影至DEM完整还原路面信息,完成对路面的建模,对路面进行高精度、高效率、数字化还原,从而实现高效率、高精度、可视化的高精地图绘制与路面部件测量。
1 实验方法
1.1 激光雷达正射系统组成与原理
车载正射影像系统由3个部分组合控制,即激光雷达系统、POS系统以及对地相机系统,如图1所示。激光雷达系统配合POS系统生成的轨迹可扫描出路面及周围环境的三维点云信息,从而生成地面模型[8]。而通过校正后影像结合轨迹可生成连续影像,将影像投影至地面模型后即可生成正射影像。针对传统摄像头在视野上不够宽广的问题,在SSW车载激光扫描系统基础上,在车尾增加3个相机。因此,该采集系统具有更大的视野范围以及有效视野距离,采集效率较高。

a
本文首先对3个车尾相机进行内参标定,实现了对摄像头的畸变校正;随后,将外方位元素计算出的组合导航结果赋予点云与影像,形成时空同步,融合为连续影像;地面点云则通过建模形成数字高程模型;然后对正射影像数据进行创建并镶嵌,为避免多相机出现正射影像色差,本文通过匀光匀色方法进行处理与优化;最后将影像投影至DEM制作真正射影像。其流程图如图2所示。
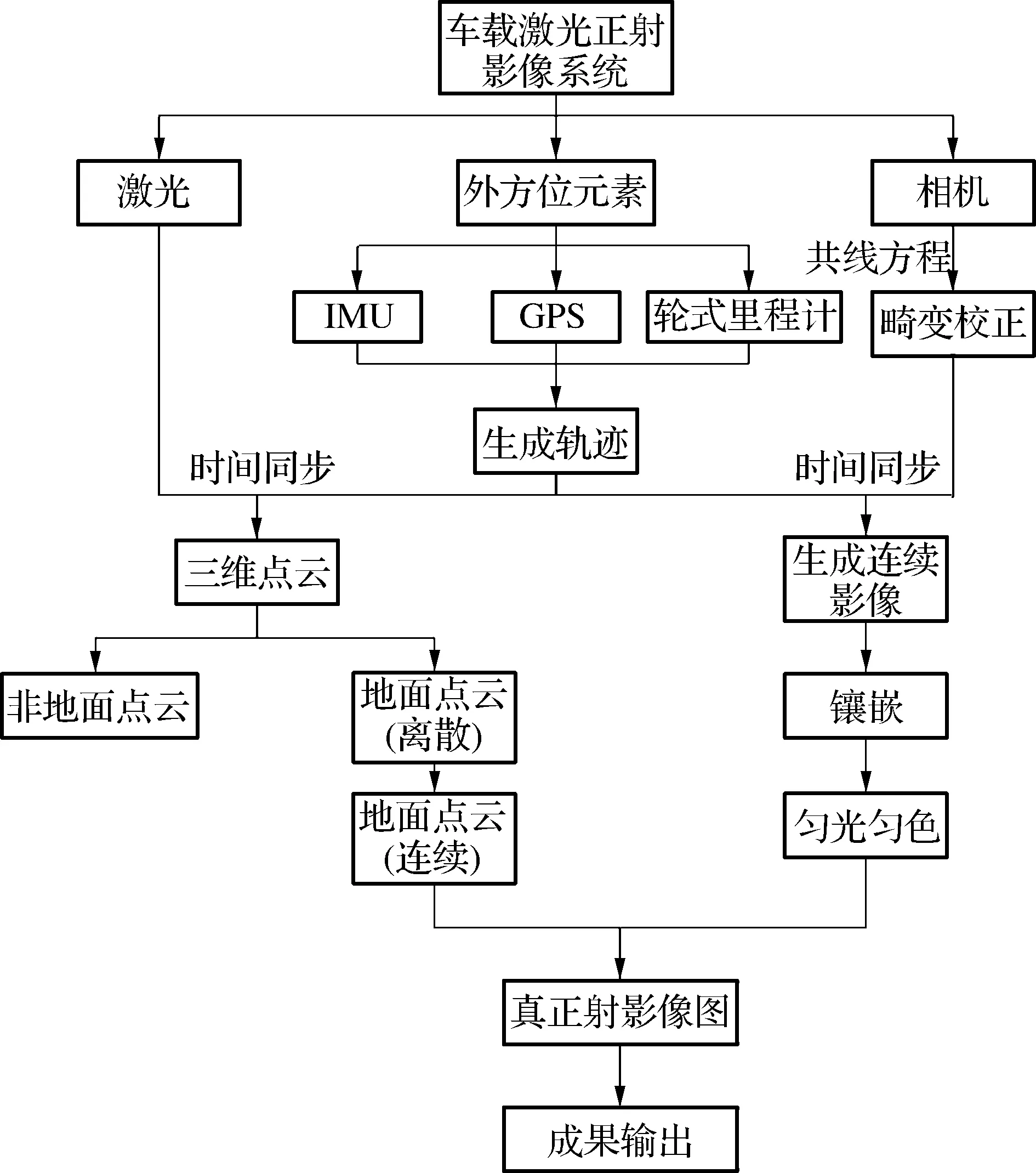
图2 车载激光扫描正射影像系统流程
1.2 数据预处理
1.2.1 相机标定 (1)径向畸变校正。由于图像在数码相机中的形成原理,相机所获取的图像与原图有一定差别,根据镜头成像原理,透镜产生畸变,导致原始图像失真。为此,需要通过相机标定找到畸变影像与非畸变影像之间的关系,根据原始影像内参标定还原非畸变影像[9]。
以成像仪光轴中心畸变为0,畸变数学模型通过泰勒级数展开式前3项进行校正,即k1,k2,k3。成像根据半径r分布位置,调解公式为
x0=x(1+k1r2+k2r4+k3r6),
(1)
y0=y(1+k1r2+k2r4+k3r6)。
(2)
其中,(x0,y0)是畸变点在成像仪上的原始位置,(x,y)是校正后新位置。实现过程为通过对输出图的点做遍历,依次找到输出点(x,y)对应的原图点(x0,y0)的像素值,再将(x0,y0)的值赋给(x,y)。
(2)几何畸变校正。与航空遥感影像不同的是,车载正射影像系统在生成正射影像时,涉及到影像投影从45°俯视角度转化为正俯视角影像,这种变换关系同样需要通过标定进行确定。在测量中,地面与地形图的投影方式属于正射投影,而车载相机投影方式为中心投影,摄影测量需要将地面按中心投影规律获得的影像转换为正射投影地形图[10]。
地面点A的坐标为(XA,YA,ZA),投影中心S在该坐标系中坐标为(XS,YS,ZS)。根据共线条件:摄影中心S、摄影时刻像点a、物点A这3点共线,则像点a在空间辅助坐标系下与物点A在地面坐标系下的坐标之间满足共线方程式(3)。成像对比如图3所示。

a
(3)
1.2.2 基于车载激光雷达的点云DEM生成 车载移动激光扫描技术可以获取比机载雷达更密集、精度更高的激光点云,并且同步匹配高清晰度的数码照片,获得的道路、人行道、绿化带等点云数据满足构建DEM要求[11]。综合考虑车载激光点云数据特点以及高效率与高精度,采用逐点内插法生成DEM,逐点内插法以内差点为中心,确定范围并选定合适的数学模型拟合计算内插点高程[12]。
首先,车载LiDAR在数据获取过程中,产生极低点或极高点,通过滤波对误差点进行剔除[13],而后对高程进行分层,再利用虚拟网格进行分层次滤波,对滤波后的点云数据建立TIN不规则三角网,并内插为所需要的DEM数据[14],最后利用反距离加权法进行内插,提高路面点云精度,完成数字高程建模[15]。生成流程图如图4所示。
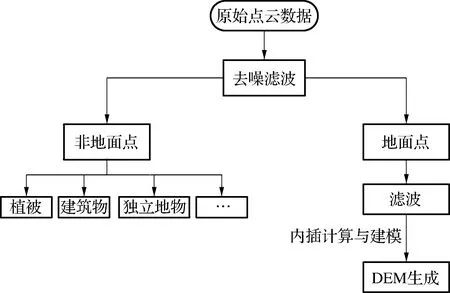
图4 基于点云DEM生成流程
2 实验过程与分析
2.1 正射影像图制作
2.1.1 影像后期处理 (1)镶嵌。在得到精确的车辆定位信息处理后的正射影像后,将生成的正射影像结合组合导航结果输出的车辆定位信息投影到相应位置,得到正射影像地图。在多张正射影像投影过程中有众多影像重合区域,因此需要融合算法对重叠区域进行像素点镶嵌。由于车载相机曝光频率高,影像重叠区域大,因此,影像精确配准十分重要。将所有影像通过GPS同步定位至WGS84坐标系,并通过控制点进行精确配准。在精确定位所有影像后,根据重叠区域影像对初始网络进行优化,优化后包含测区中的所有正射影像,并将冗余部分进行处理,适合多帧影像的镶嵌处理[16]。
(2)匀光匀色。在利用车载相机获取对地观测影像数据过程中,在拍摄时间、光照、相机自身等因素影响下,所获取到的影像数据之间在色调和亮度方面存在差异,给后面的车载相机正摄影像处理带来极大困难,因此需要对车载相机影像进行匀光匀色处理。然而当前匀光匀色算法主要是基于卫星遥感影像,车载相机影像有别于传统航空遥感影像,具有数据量大、影像张数多、行人遮挡导致路面遮挡等使局部地区亮度过暗等问题的特点,因此,处理遥感影像匀光匀色的额算法并不能完全适用于车载相机影像处理算法过程。
如今常用的匀光匀色算法主要包括掩模(Mask)匀光法、基于自适应模板匀光法、基于 Wallis 滤波器的匀光法3种。Mask 匀光法以高斯低通滤波器模拟影像分布作为背景影像的亮度,用原始光照不均匀影像减后获得背景影像,并做对比度拉伸,从而增强影像细节反差,最后起到匀光匀色的效果[17]。该算法主要通过增加细节反差达到匀光匀色效果,数据量过大,因此不适用于车载相机影像。虽然基于自适应模板匀光法在处理速度上比Mask匀光法更快,但依然存在诸如对影像中路人以及其他物体的遮挡、影像亮斑噪声去除不理想等弊端。
而基于Wallis滤波器的匀光方法,其利用影像灰度均值与方差来处理影像,使原始影像具有近乎相同的灰度均值以及方差,从而达到匀光匀色目的。对于高重叠度的影像效果较好,由于车载相机获取的影像色差不大且影像重叠度较高,此方法对车载影像处理效果较好。图5为匀光匀色效果。

a
2.1.2 影像投影至DEM制作真正射影像 SSW车载激光扫描系统利用直接定向法,无需在地面架设任何控制点,利用POS系统进行外方位元素直接定向,快速恢复空间模型,既能保证较高的精度,又能减少外业时间。
使用TerraSolid将算法数据导入程序,包括影像文件,GPS,IMU文件和已生成的DEM文件。利用姿态信息解算照片的外方位元素定位影像位置[18]。首先计算影像点所对应的地面点坐标,以此为基准导入程序中DEM文件;其次将根据共线方程所纠正的影像按像点坐标对应地面点坐标的方式投影至DEM,得到一张正射投影且带有位置信息的正射影像图。
2.2 结果分析
通过车载激光雷达系统处理过的正射影像在镶嵌线附近色彩过渡平滑,不存在几何错位等情况,能够真实反映道路的高精度测量绘制。为了验证处理的精度,对影像数据进行统计分析。
实验1、实验2分别为在北京市丰台区小屯路上的两组实验。对小屯路路段进行还原后,通过实验对扫描车道路往返两次的点云进行特征选点,分别选取平面上在两侧道路点云和高程上在两侧车道都能扫到的位置,分别采集相同位置的高程值进行选点,见图6和图7。具体实验结果见表1和表2。
a
a
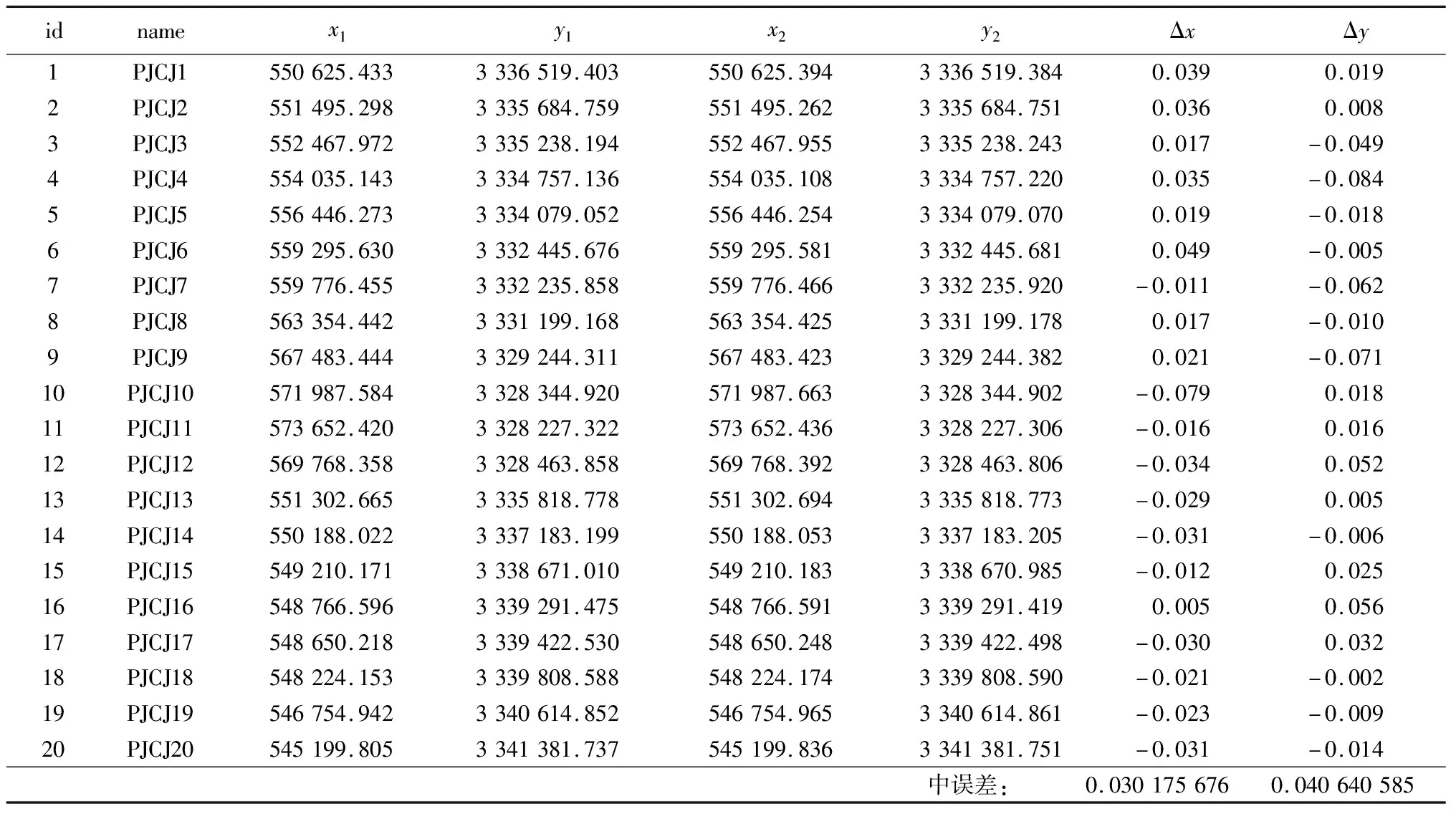
表1 点云平面精度
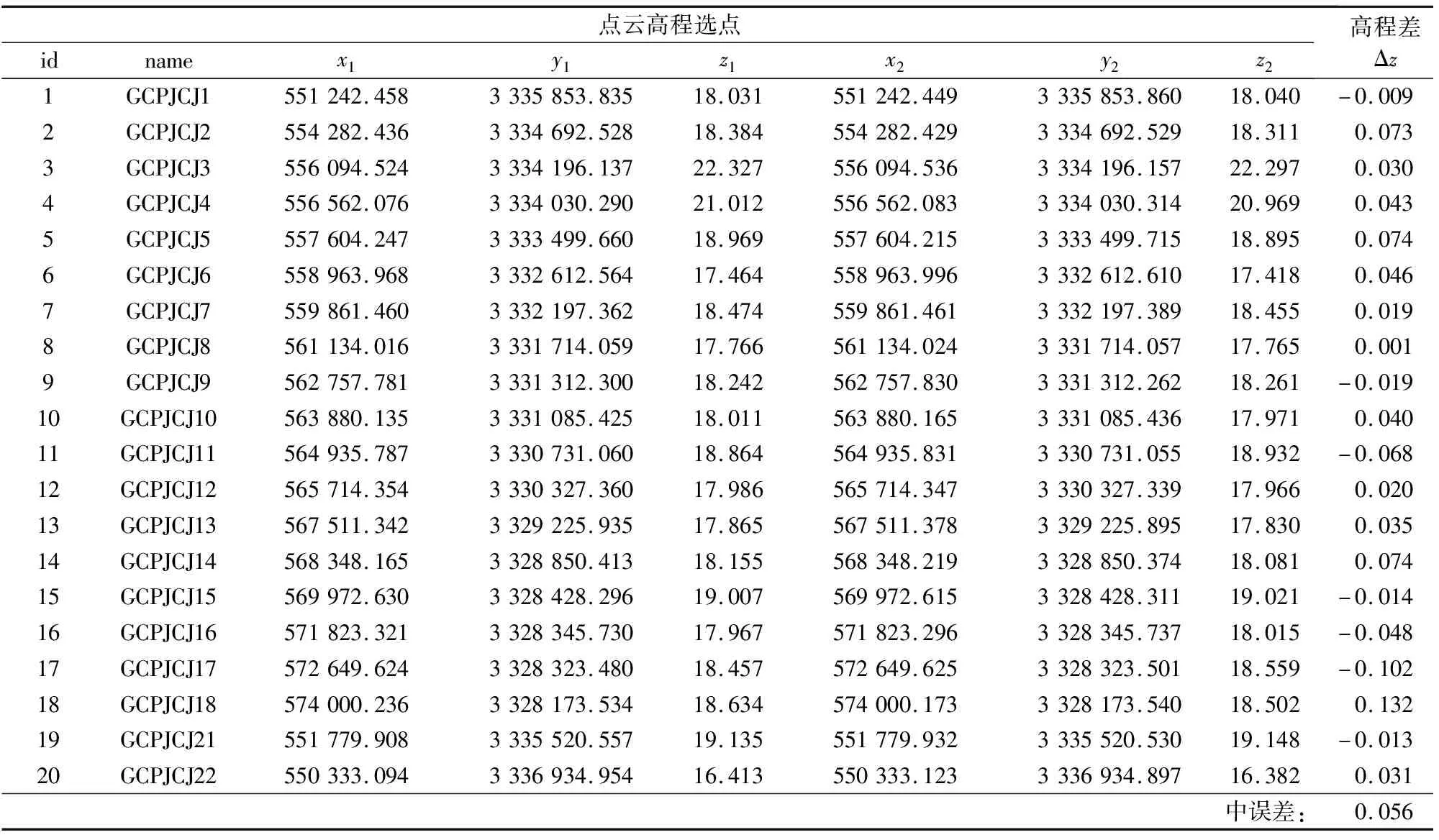
表2 点云高程精度
通过实验分析,车载正射影像系统在正射影像精确率上较高,对于道路细节呈现更加精确。通过该方法生成的高分辨率道路正射影像图解决了航拍或卫星地图分辨率不够高导致无法提供丰富的路面信息方面的缺陷,在制作高精地图、公路竣工测量、公路规划调查与施工、既有线路改造理赔预算等方面具有较高的使用价值。
3 结语
相比于其他遥感手段,LiDAR技术在快速直接获取高精度、高密度地面三维数据方面有着一定优势,车载激光扫描正射影像系统在路面上有着相比于航空正射影像更加精确的正射影像。本文对LiDAR点云数据进行处理获取数字高程模型(DEM),再利用车载正射影像的纠正、镶嵌、匀光匀色生成消除投影误差的正射影像图。实验结果表明,使用激光LiDAR内插原理输出的DEM能真实全面拟合地面模型,所得数字高程模型精度较高。通过正反解法结合生成的DOM与数字高程模型匹配度高、误差小,在生成正射影像的同时,还可以得到地面高程数据。
但是,后续仍有很多值得改进的地方,具体包括以下两个方面。
(1)本文所使用的多摄像头方案有比较好的建图效果,然而对道路周围环境并没有完全还原,仍出现了没有完全覆盖所有测区的情况,后续研究需要增加超广角镜头甚至全景镜头进一步优化与设计。
(2)由于在信号遮挡处GPS定位精度不高,且IMU对高程纠正精度不高,导致部分点的高程偏移较大,后续研究将对此问题进行改善。