预估型氨法脱硫控制系统研究
2022-05-28马立新
李 猛,马立新
(上海理工大学 机械工程学院,上海 200093)
我国是能源大国,其中煤炭资源占我国资源构成的70%~80%。同时,我国也是世界上最大的煤炭生产国和消费国。煤炭直接燃烧会排放大量硫化物和氮氧化合物,给生态环境带来巨大威胁,因此减小SO2的排放成为一个亟待解决的问题。对火力发电厂来说,加大对火力发电厂燃煤SO2控制力度显得尤为重要。
截止目前为止,已经成功研发并投入使用的相关脱硫技术已超过200余种,其中烟气脱硫技术应用最为广泛,而脱硫效果最好且副产物利用率最高的则为氨法脱硫技术[1]。烟气脱硫方法初始投资成本较高,系统流程较繁琐,且实现任务重、运维成本较高。氨法脱硫技术是回收型工艺,利用NH3气体来消除烟气中含有的SO2,副产物是高效化肥,可以变废为宝,实现资源的最大化利用,且氨法脱硫工艺流程简单易操作,无二次污染,是当前有效控制SO2排放最为环保的脱硫技术[2]。氨法脱硫系统中,锅炉燃烧产生的烟气温度高流速快,造成烟道的震动,所以在烟道内无法安装精密的NOx检测仪,需使用一条长约数十米的配管来引导设置在地面上的NOx检测仪。NOx值从传感器到被输出排放的过程存在检测延迟现象,即构成典型的大延迟系统。
针对大延迟系统,传统的比例积分微分(Proportion Integration Differentiation,PID) 控制往往无法实现NH3的精确投放,当锅炉内负荷变化时,会在NOx检测仪的延迟时间内造成氨过量或不足。为有效解决延时问题,通常采用添加补偿环节即Smith预估器来解决[3],但是该方法的负荷实时跟踪控制效果不理想。文献[1]采用粒子群算法对PID参数进行整定,得到PID控制器阶跃响应结果,但与工程中所要求负荷实时跟踪控制作用关联不大。文献[2]提出基于T-S模糊神经网络改善脱硫系统的自适应能力,却仅局限于PID控制,不能对负荷实时变化过程作出反应。文献[3]提出自适应Smith控制系统,其可在负荷波动较大时进行实时跟踪控制,但是存在响应时间较长问题。基于此,本文提出基于人群搜索算法(Seeker Optimization Algorithm,SOA)的Smith预估PID控制系统。传统的PID参数整定往往采用的是试凑法,试凑时间长且效率不高,通过SOA算法对PID参数整定,并采用绝对误差积分作为适应度函数,可快速高效地找到最佳的比例、微分和积分系数的组合,稳定地对负荷进行实时跟踪控制。此外,有别于采用阶跃信号作为输入信号的常规模式,本文通过对输入1 800 s的实时数据进行仿真。结果表明,本文所提方法的仿真结果较好地体现了系统的实时跟踪性。
1 氨法脱硫控制系统
1.1 传统的氨法脱硫系统
对于脱硫控制系统,传统方法是提前计算出NOx总含量,并将此作为氨的需求流量在前馈中注入氨,随后使用催化剂让与NOx发生氧化还原反应,实现脱硫目的。这种操作的最终产物为硫酸铵,为氮肥的主要成分,可实现资源的二次利用。在锅炉内负荷变化不大时,采用该方法可以取得较好的控制效果,但一旦锅炉负荷发生较大波动时,在NOx检测仪的延迟时间内将发生氨的过量与不足,即传统的PID控制无法有效解决大延迟问题。
1.2 基于Smith预估器的脱硫控制系统
针对典型的大延迟系统,本文提出了基于Smith预估器的脱硫控制系统。Smith预估器核心在于抵消系统特征方程中传递函数的纯滞后环节[4]。其基本工作原理为在控制系统某处增加支路或环节,将被控对象的数学模型转移到控制回路中去,使得转变后系统控制通道和传递函数分母中均不会出现纯滞后项,达到实时跟踪负荷并有效改善系统稳定性的目的。

图1 基于Smith预估器的脱硫控制系统结构框图Figure1. Structure block diagram of desulfurization control system based on Smith predictor
基于Smith预估器的脱硫控制系统方案如图1所示。新的脱硫装置就是在传统的脱硫装置中加入补偿环节,即在传统的NOx信号线中插入NOx估算机构。NOx值的估算是通过锅炉输入燃料、空气、氨和脱硫中间产物SNOx来计算的。从锅炉的输入对脱硫装置入口的NOx进行估算,到控制环采用的是前馈控制。从脱硫装置入口对脱硫装置出口的NOx进行估算,到SNOxPID控制环采用的是反馈控制[5]。系统通过添加NOx估算机构模拟设备,补偿延迟时间,解决了系统存在的大延迟问题。虽然Smith预估控制从理论上可解决系统的时滞问题,却会让系统的鲁棒性变差,使得系统性能过分依赖模型的准确性[6]。文中Smith预估器控制的控制器是PID控制器,PID控制依赖被控对象模型的精确性[7],故对大延迟系统过程控制的模型要求较高。传统的PID控制往往由有经验的工作人员采用试凑法进行人为整定,耗时耗力且过分依赖工作人员的经验值,系统偶然性增加,且个体差异的存在也增加了系统波动,因此PID参数整定已成为亟待解决的问题。
2 基于SOA的Smith预估PID控制系统
2.1 人群搜素算法
人群搜索算法是近几年提出的一种启发式随机搜索群体智能算法。其通过模仿人的搜索行为对问题进行分析,借助认知科学、心理学、脑科学、群体智能和多Agents系统及人工智能的研究成果,研究分析人作为高级Agent的利己行为、利他行为、预动行为、自组织聚集行为和不确定推理行为,对其建模并确定搜索步长和搜索方向[8],并根据搜索步长和搜索方向不断更新搜寻者最佳位置,以寻找最优解。
2.1.1 确定搜索步长
SOA利用模糊系统的逼近能力来模拟人类智能搜索行为,用以建立目标函数和搜索步长之间的关系。其模糊规则可描述如下:若目标函数适应值越大,则搜索步长越大,反之则步长相应变小。这里采用高斯隶属函数表示搜索步长模糊变量。
μA(a)=exp[-(a-u)2/2δ2]
(1)
其中,μA为高斯隶属度;a为输入变量。当输出变量超过[μ+3δ,μ-3δ],其隶属度μA(μ+3δ)<0.011 1时,可忽略不计,这里设定最小隶属度μmin=0.011 1。通常情况下,个体最佳位置有最佳隶属度为1,最差位置隶属度为0.011 1。为加快收敛速度[9],并使最优个体拥有不确定步长,此处选取μmax=0.950 0,由此可得目标函数的模糊变量为
(2)
μij=rand(μi,1),j=1,2,3,…,D
(3)
其中,μij表示第j维搜索空间目标函数i的隶属度值;D为搜索空间维数;Ii表示该人群以函数值由高到低排列后Xi(t)的序列编号。以上两式模拟了人类搜索行为,rand(μi,1)表示均匀分布在区间[μi,1]上的实数,其搜索步长为
(4)
其中,δij为高斯隶属度函数,其值为
δij=ω.abs(∂min-∂max)
(5)
ω=(Tmax-t)/Tmax
(6)
式中,ω是惯性权值,随迭代进化的次数增加从0.9线性递减至0.1;t表示当前迭代进化次数;T为最大迭代进化次数。
2.1.2 确定搜索方向
搜索方向的确定是通过对人的利他行为、利己行为和预动行为分析并建模,因而可获得任意维度第i个个体的利己方向、利他方向和预动方向,即
di,ego(t)=pi,best-∂i(t)
(7)
di,alt(t)=gi,best-∂i(t)
(8)
di,pro(t)=∂i(t1)-∂i(t2)
(9)
通过对利己方向、利他方向和预动方向进行整体分析,采用随机加权平均的方法确定搜索方向
di(t)=sign(ωdi,pro+φ1di,ego+φ2di,alt)
(10)
式中,t1,t2∈{t,t-1,t-2};ai(t1)和ai(t2)分别为{ai(t-1),ai(t-2),ai}中最优点位置;gi,best表示第i个个体所在领域的集体历史最佳位置;pi,best表示个体最佳位置;φ1和φ2均为[0,1]内的随机选择的实数;ω为惯性权值。
2.1.3 位置更新
确定搜索方向和搜索位置后,需对位置进行更新,计算式为
Δ∂ij(t+1)=∂ij(t)dij(t)
(11)
∂ij(t+1)=∂ij(t)+Δ∂ij(t+1)
(12)
式中,dij=﹣1表示搜寻者i延着j维坐标的正方向前进;dij=1表示搜寻者i延着j维坐标的负方向前进;dij=0表示搜寻者i在j维坐标下保持静止。
2.2 基于SOA的Smith预估PID控制系统设计
针对PID参数整定问题,提出了基于人群搜索算法的PID参数整定方法[10],并选取误差绝对积分(Integrated Time and Absolute Error ,ITAE)性能指标作为系统适应度函数。为避免控制器输出过大产生剧烈震荡或过大调节幅度[11],将积分项中加入控制器输出的平方项u2(t),系统适应度函数如式(13)所示。
(13)
通过适应度值的不断寻优,并经过设定次数迭代(这里设为100次),进而得到最佳的比例、积分和微分系数的组合[12],得到最佳的控制效果。如图2所示即为基于SOA的Smith预估PID控制系统结构框图。

图2 基于SOA的Smith预估PID控制系统结构Figure 2. Structure of Smith Predictive PID control system based on SOA
其算法设计步骤如下:
步骤1随机产生初始的群体,并设置算法初始参数;
步骤2调用Simulink部分PID模型文件,将算法程序中未知参数依次传递给PID模型文件的kp、ki、kd,输出误差绝对积分ITAE,传递至SOA算法程序;
步骤3根据每个搜寻者的当前位置和历史位置的比较,得历史最优位置。将个体历史位置与种群历史最优位置比较,得种群最优位置;
步骤4确定搜索步长与搜索方向,执行位置更新操作,调用步骤2,计算相应的ITAE,更新最优粒子;
步骤5判断ITAE是否满足条件或者迭代寻优是否达最大次数,若满足条件,则退出算法,得到最优比例积分微分系数组合;反之,继续重复执行步骤4直至满足条件为止[13]。
3 脱硫控制系统仿真实验

3.1 PID参数整定结果
利用SOA对PID参数进行整定,可以获得更好的性能指标。这里设种群规模为30,最大迭代次数为100,kp、ki、kd3个参数的搜索范围为[0,100],其适应度函数优化曲线和kp、ki、kd参数优化曲线如图3、图4所示。
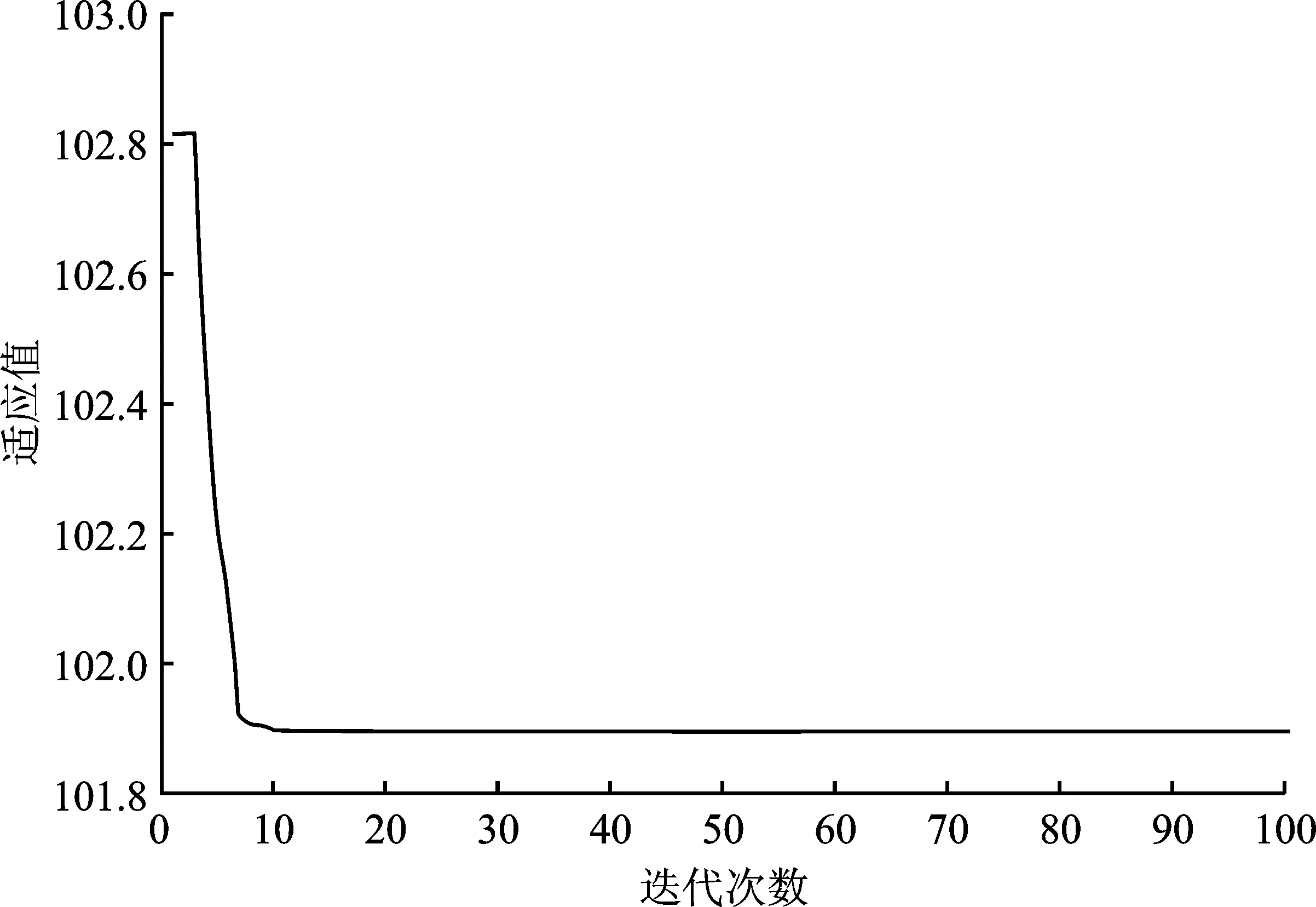
图3 适应度函数优化控制曲线Figure 3. Fitness function optimization control curve
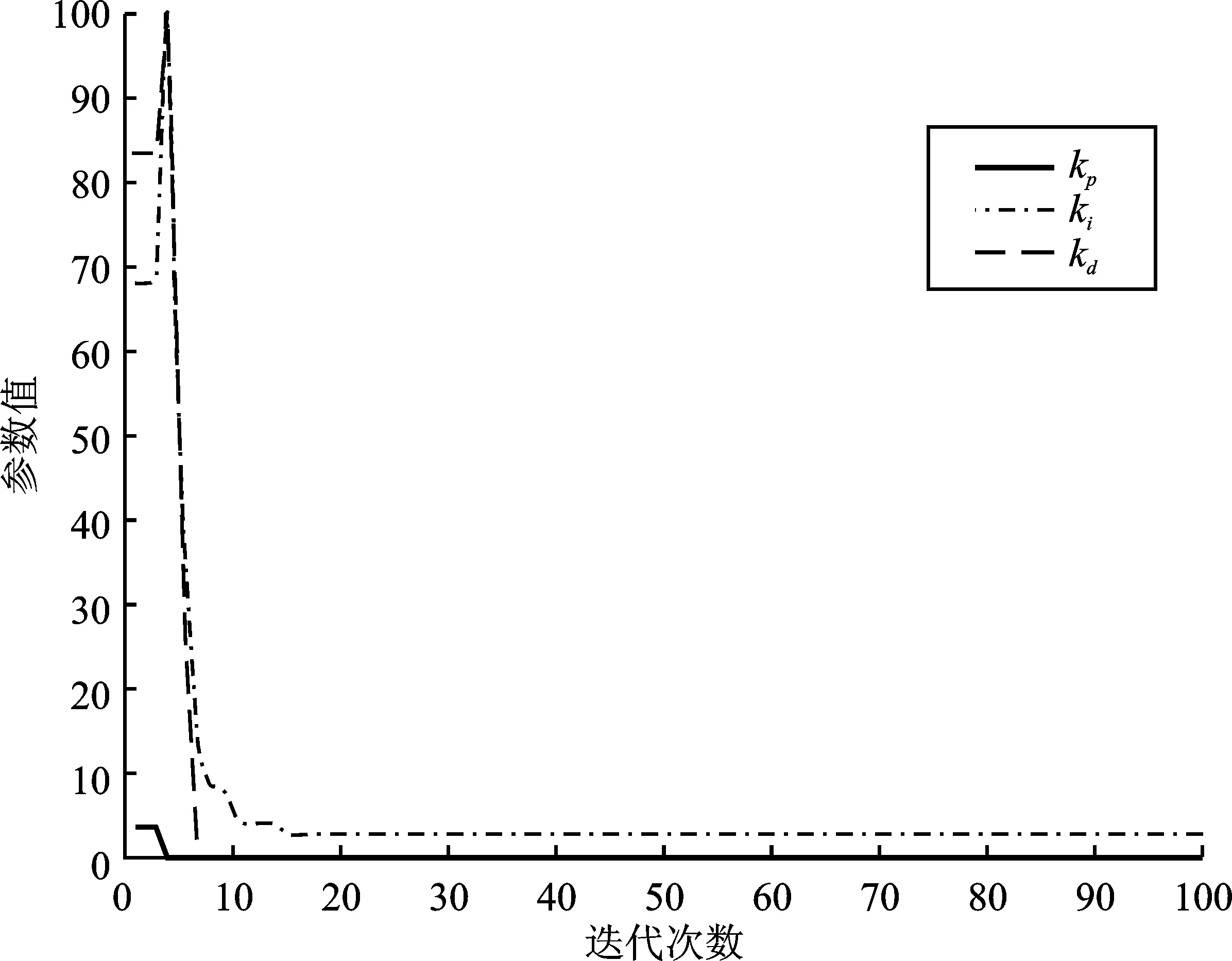
图4 kp、ki、kd 参数优化曲线Figure 4.Parameters optimization curves of kp, ki, kd
由上图结果所示,经过100次迭代以后,适应度函数逐渐达到最小值,同时kp、ki、kd也实现了参数寻优。
3.2 脱硫控制系统仿真对比实验
传统的脱硫控制系统采用PID控制,由有经验的员工采用试凑法进行调整,为解决脱硫系统的大延时过程,提出基于Smith预估器的脱硫控制系统,从一定程度上有效地解决了延迟时间长的问题,但其PID参数整定仍然是由试凑法调整,致使系统偶然因素较高[16]。因此,本文进一步提出了基于SOA算法的Smith预估PID控制系统,以下为这几种脱硫控制系统的仿真结果。
(a)
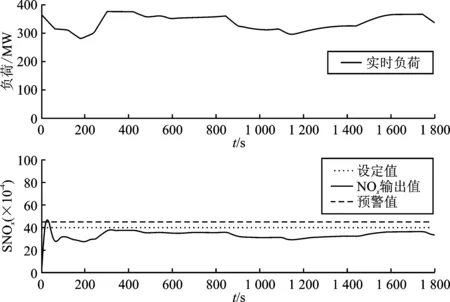
从图5(a)可以看出,传统的脱硫控制系统控制效果不是很理想,其在前100 s一直处于频繁波动中,且在30~50 s内超过了预警值,后续在负荷变化时,NOx输出值一直在设定值以下且偏离较远的位置,实时跟踪控制效果较差[17]。对于典型的大延迟系统,利用传统的PID控制显然并不能满足性能需求。
反观图5(b),基于Smith预估器的脱硫控制系统控制效果明显好于传统的脱硫控制系统,但系统的前100 s波动幅度较大,且在开始一段时间内超过了预警值。在20~100 s的时间内,系统在设定值左右来回波动,但是在100 s以后,系统的波动幅度明显减小,系统趋于稳定且一直稳定在SNOx预设值左右。当负荷变化时,可以较好地对负荷进行跟踪控制,取得了一定的控制效果。
从图5(c)可以看到,系统在前400 s虽波动频繁,但波动幅度较小,最大也只有0.2 ppm,且波动一直在预设值上下,没有超过预警值;当负荷急剧变化时,系统的反应时间较短,基本控制在3~5 s以内;在这些负荷骤变点,均有不同幅度的短时尖峰,即频率较小的振荡。这说明基于SOA的Smith预估PID控制系统反应迅速,负荷实时跟踪控制效果比较好。
3.3 控制效果对比
通过对这3种控制系统仿真结果进行对比分析,将所得MATLAB图像进行放大处理可以得到这3种控制系统对应的性能参数对比结果,如表1所示。
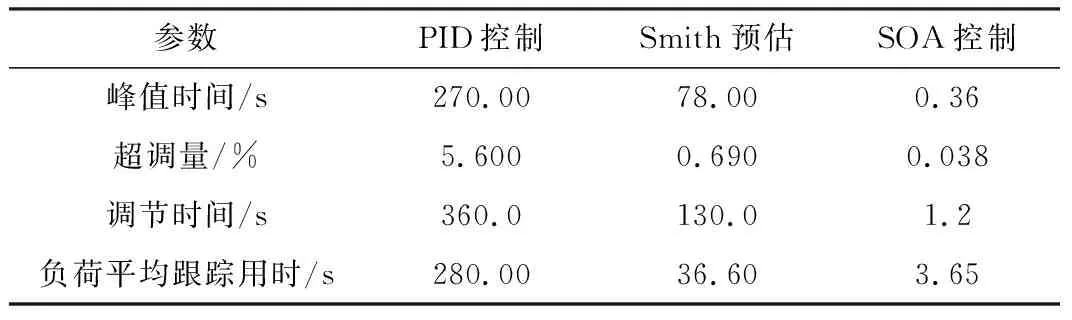
表1 3种控制方法性能参数对比
根据表1所示结果,可以得出以下结论:(1)传统的PID控制未能取得良好的控制效果,且具有较大的超调量和调节时间。超调量是指系统超过稳态值时,输出第一个极大值与稳态值之差除以稳态值得最大偏差百分比。超调量越小,则系统越平稳,即偏离稳定值的幅度小。在实时跟踪控制性能上,传统的PID控制也未取得较好的控制效果;(2)对比Smith预估型控制系统,基于SOA的Smith预估PID控制系统峰值时间由78 s缩小为0.36 s,说明后者响应的灵敏程度远高于前者,超调量也有明显的减小,即基于SOA的Smith预估PID控制系统较为稳定。最后,在调节时间上,后者有大幅度提升,说明后者可以对过程进行更好地控制;(3)Smith预估控制系统虽有效解决了脱硫系统的大延迟问题,但是从负荷实时跟踪反应时间平均值来看,依然不能有效地实现负荷的实时跟踪[18-19]。而基于SOA的Smith预估PID控制系统负荷跟踪平均用时仅为3.65 s,表明系统可以更好地处理外部扰动,鲁棒性也较好。
4 结束语
在氨法脱硫控制系统中,由于NOx传感器检测的延时,使该系统成为典型的大延迟系统。传统氨法脱硫一般采用PID控制,并通过有经验的工人利用试凑法进行氨的投放,偶然性及系统波动性较大。一旦出现判断失误,不仅会造成资源的浪费,烟气的排放也将达不到标准。
针对传统的氨法脱硫控制系统,本文进一步提出了Smith预估型脱硫控制系统,可有效解决脱硫系统存在的大延时问题。但该系统的负荷实时跟踪控制效果仍未达到理想状态,调节时间过长,且在PID参数整定上还是延用经验法进行整定。因此,本文创新性提出基于SOA的Smith预估PID控制系统。本文利用人群搜索算法对PID参数进行整定,使得新系统不仅有效补偿了延迟时间,在负荷实时跟踪控制效果上也可达到预期效果,系统控制性能得到明显改善。仿真结果表明,新系统对负荷波动反应迅速,且在系统稳定性和控制精准性上取得了一定突破。另外,本文未采用传统的阶跃信号,而利用1 800 s负荷实时数据输入进行仿真,在实际工程中有一定的应用价值。
