基于超级电容的列车制动能量回收控制策略
2022-05-28宋瑞刚
曾 光,杨 俭,宋瑞刚
(1.上海工程技术大学 城市轨道交通学院,上海 201620;2.上海地铁电子科技有限公司,上海 200233)
城轨列车运行过程一般比较复杂,且具有站间距离短、行车密度高、用电电压电流较大等特点。城轨列车在频繁起动与制动过程中牵引网电压大幅波动,易导致过压或欠压故障。在城轨列车制动过程中还会产生制动能量[1]。
目前,城轨列车主要采用电阻制动和再生制动相结合的方式处置制动能量[2-3]。该方案基于对牵引网电压的监控。在制动时,牵引网电压上升,当牵引网电压小于1 650 V时,采用再生制动,将制动能量转换为电能被同一供电区间内其他相邻列车吸收利用;当牵引网电压介于1 650~1 800 V之间时,再生制动和电阻制动共同作用,通过制动电阻耗散电能;当牵引网电压大于1 800 V时,进一步触发橇棒电路进行放电,以保护逆变器。该方案不仅造成制动能量浪费,还无法降低牵引网电压波动范围。
从列车运行系统的角度,本文主张安装一种车载式超级电容能量回收利用装置,并提出了相匹配的控制策略,用以改善列车制动能量的利用状况。
1 列车运行特性
如图1所示,在理想情况下,依据运行速度可将列车从起动到停止的整个过程划分为3段:加速牵引段(0~12.4 s)、惰行运行段(12.4~15 s)以及减速制动段(15~26 s)。
在列车牵引加速段,牵引电机依次经历恒转矩区(0~5.6 s)、恒功率区(5.6~11 s)和自然特性区(11~12.4 s)。在列车制动减速段,牵引电机调速过程相反。当减速度较小时,制动过程可不经历恒功率区。
在列车运行过程中,牵引电机用电特性可以通过牵引电机定子回路的线电压uab(t)、线电流iL(t)、有功功率Pe来表示,分别为
(1)
(2)
(3)
式中,Uab为线电压有效值;ω为电机同步角速度;t为列车运行时刻;θ为线电流与线电压感性相位移角;IL为线电流有效值。
牵引电机是电能和机械能的换能器。在忽略损耗的情况下,列车机械运行特性可以通过牵引电机的角速度ωr、机械功率Pm来表示,分别如[4]式(4)和式(5)所示。
(4)
(5)
式中,Tei为电磁转矩;Tm为运行阻力转矩;np为电机极对数;Jeq为列车运行等效转动惯量;η为机械效率。
列车在惰行区段时,Tei-Tm=0。由式(5)可知,此区段内列车运行功率主要取决于列车运行阻力转矩Tm。由于列车运行具有站间距离短特点,牵引加速度和制动减速度较大,故Tei-Tm≫Tm,因此列车在牵引过程消耗的功率和制动过程回馈的功率一般较大,且远大于列车在惰行区段功率。基于列车运行过程中这种机械功率特性,列车制动时回馈的制动能量在回收后可用于补偿列车牵引消耗。
在列车运行过程中,对系统进行无损耗简化,并结合牵引电机用电特性和机械运行特性,以牵引网电压Udc不变做一个推导。首先由功率平衡关系可求得
iL(t)uab(t)=idc(t)Udc
(6)
式中,idc(t)为牵引网电流,为
(7)
结合式(5)和式(7)得到列车运行过程中的牵引网直流电流分量
(8)
根据式(4)、式(5)和式(8),在保持Udc不变情况下,列车从起动到停止过程中,列车运行速度、牵引电机功率、牵引网电流、电机转矩变化过程如图1所示。由图1可以看出,牵引网电流Idc与牵引电机功率成正比列关系,在恒转矩区(0.0~5.6 s与20.4~26.0 s),牵引电机功率大小随列车运行速度变化;在恒功率区(5.6~11.0 s与15.0~20.4 s),牵引电机功率数值恒定;在惰行区(12.4~15.0 s),牵引电机功率数值较小。牵引时牵引电机功率数值为正,制动时牵引电机功率数值为负。
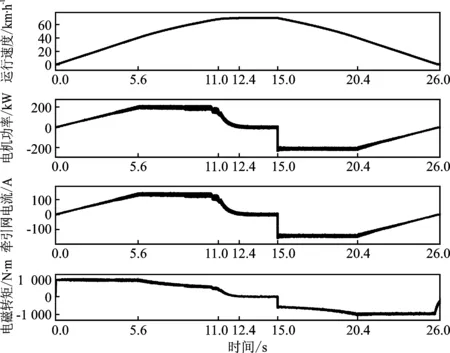
图1 列车运行特性Figure 1. Train operating characteristics
制动能量回收利用系统及其控制策略,以保持Udc不变为控制目标,以Idc为控制依据,通过回收Pm值为负时的制动能量,补偿Pm值为正时所需的牵引能量,使能量回收系统在稳定运行的同时也可满足列车运行过程中牵引电机的用电特性和机械运行特性[5],进而保障列车供电质量,并保持列车转矩与速度等原有变化过程不受影响。
2 牵引网电压波动分析
城轨列车多采用交直交电力传动系统。如图2所示,该系统能于交流电网,经过主变压器降压,由二极管整流系统整流为直流电,滤波后输送到牵引网(或第三轨)。列车受流装置(受电弓或受流靴)与牵引网滑动连接,直流电通过列车车载逆变器逆变为电压、频率可调的交流电,从而驱动牵引电动机形成动力[6]。
在列车运行过程中,牵引网功率与电机功率存在双向流动,但牵引变电所二极管整流电路功率是单向的[7],只能从交流侧输送到牵引网,而且由于牵引网与钢轨都存在阻抗,因此导致整流电路与牵引电机两者的功率不相等,最终造成Udc的波动[8]。
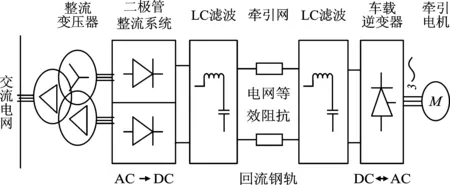
图2 城轨列车电力传动系统Figure 2. Electric drive system of urban rail train
依据城市轨道交通的供电和列车运行特性,得出列车牵引过程中牵引网电压波动范围为1 250~1 500 V。列车制动时,制动电阻斩波器将牵引网电压限制在1 800 V内,因此列车运行过程中牵引网电压波动范围为1 250~1 800 V。当波动为额定电压1 500 V的-16.7%~20%时,电压波动较大。
牵引网电压的大幅度波动是因为目前城市轨道交通系统采用制动电阻方案。该方案未考虑输入、输出功率不匹配这一引起电压变化的本质因素,导致无法突出较好的动态特性,无法给列车运行提供稳定可靠的供电电压。而储能装置则可将列车电力传动系统输入、输出功率进行匹配。
3 制动能量回收与利用
3.1 制动能量回收利用系统
本文采用超级电容串并联储能单元和双向DC-DC变换器(Direct Current to Direct Current Converter)组成的车载式制动能量回收利用系统方案,对列车电力传动系统输入、输出功率进行匹配。如图3所示,制动能量回收利用系统并联接在列车高压主回路的LC滤波器侧。该系统由主电路、参数测量模块、控制模块构成。主电路包括DC-DC主电路模块、限流环节、超级电容串并联储能单元。该系统主要涉及直流电路,因此本文对原车载逆变器交流电路不作过多阐述。
该系统中双向DC-DC变换电路对能量供需双方之间的时间差和供需量进行控制,实现列车非制动时释放电能,制动时回收电能。制动能量的回收以列车原有电制动的再生制动回馈为基础,对车载逆变器回馈到牵引网的制动能量中引起触网电压升高部分进行回收。制动能量回收利用系统通过受流装置连接在牵引网回路中。在非制动状态时,超级电容释放能量,本车为主要负载,同时还可以为同一供电区间内的其他相邻列车进行功率补偿。

图3 制动能量回收利用系统总体方案原理图Figure 3. Schematic diagram of the overall scheme of the braking energy recovery and utilization system
该系统首先根据列车电流值I进行列车运行状态判断[9],如果列车电流值I为负,表示列车处在制动状态,控制模块根据超级电容充电控制策略,调节充电时双向DC-DC变换电路低压端电压UL;如果列车电流值I为正,表示列车处在非制动状态,控制模块根据超级电容放电控制策略,调节放电时双向DC-DC变换电路高压端电压UH。该系统通过对UL及UH的控制,实现对超级电容串并联储能单元充放电功率PSC的控制,进而实现对列车电力传动系统系统输入、输出功率的匹配控制。
该系统能够实现列车在不同运行状态时,平滑切换能量回收利用系统的工作模式,在控制牵引网电压稳定的情况下,使超级电容充放电功率以功率正向或负向对列车运行功率进行补偿[10]。系统的结构流程如图4所示。
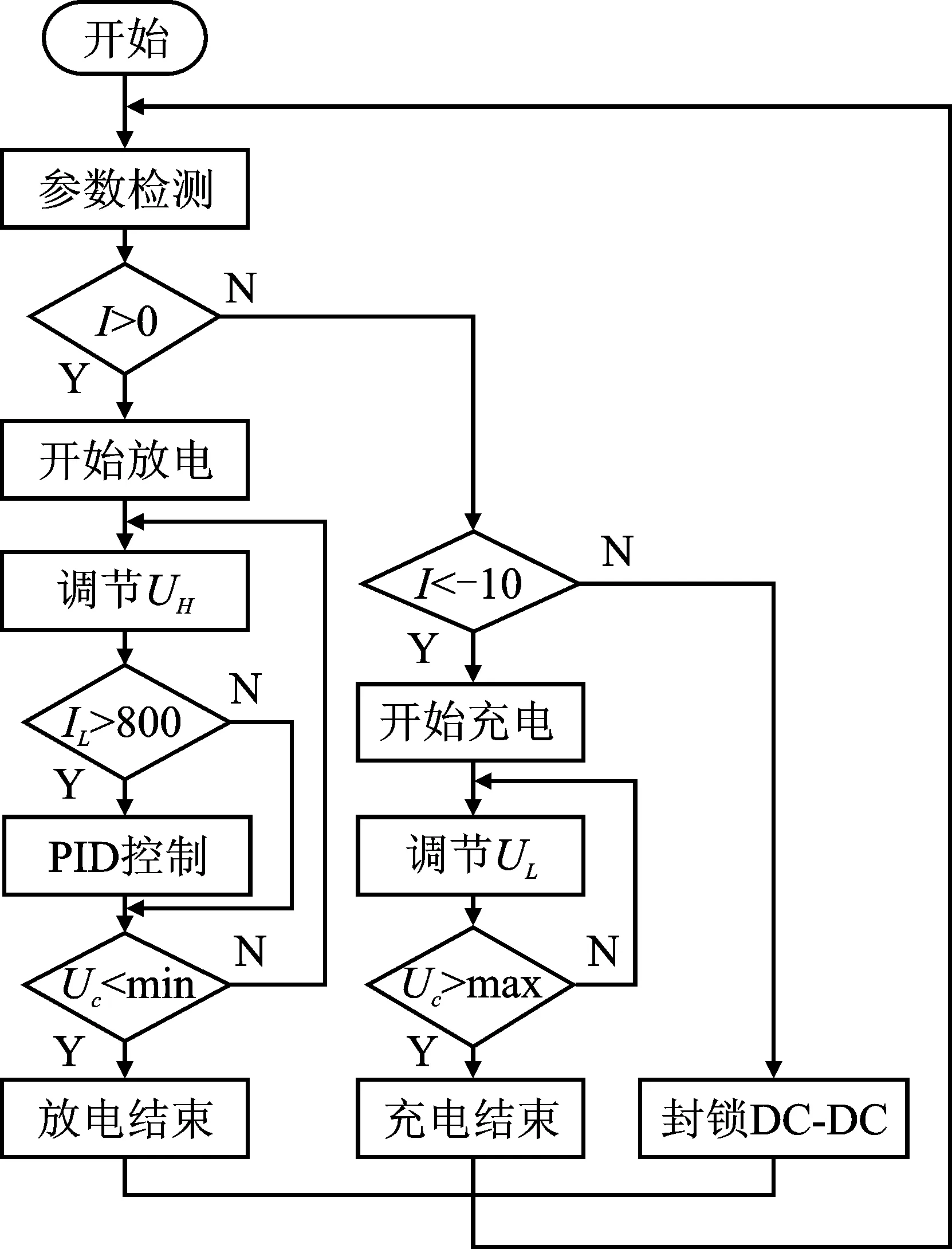
图4 制动能量回收利用系统控制策略流程图Figure 4. Flow chart of control strategy of braking energy recovery and utilization system
3.2 双向DC-DC变换器
众多双向DC-DC变换器拓扑结构中,半桥型Buck/boost具有拓扑结构简单、控制简便和可靠性较高的优点,且有较好的调压特性。此外,半桥型Buck/boost效率较高,其稳健性和动态性能能够满足能量转换的特殊要求。综上所述,本文采用半桥型Buck/boost双向DC-DC变换器。
双向DC-DC变换器在列车运行的动态过程中,可随列车运行状态的变化而不断改变控制方式。其控制方式按照策略特性分为降压充电模式、升压放电模式和电压封锁模式。双向DC-DC变换器就在这3种工作模式下进行制动能量的回收和利用[11]。
双向DC-DC变换器主要由主电路模块、PWM(Pulse Width Modulation)发生器、隔离驱动电路构成,其结构图如图5所示。

图5 双向DC-DC变换器结构图Figure 5. Diagram of Bi-DC-DC converter structure
如图6所示,主电路模块包括功率开关管IGBT(Insulated Gate Bipolar Transistor)、高压侧滤波电容、低压侧滤波电容、升降压电感。高压侧滤波电容并联接在列车高压主回路的LC滤波器侧,形成CLC滤波电路[12]。该滤波电路对直流纹波有一定的抑制作用,可以减小给列车传动系统带来的不利影响[13]。
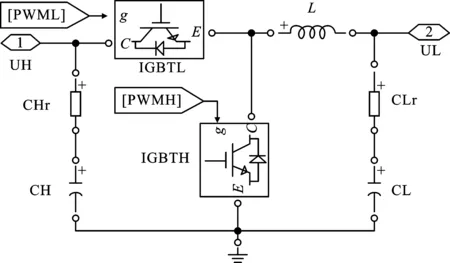
图6 双向DC-DC变换器主回路Figure 6. Bi-DC-DC converter main circuit
列车运行状态电流I、变换器两端口电压UH与UL、低压端电流IL由参数测量模块测得,并作为控制电路输入量。该系统控制模块根据列车运行状态,计算并输出所需占空比,控制DC-DC高压或低压侧端口电压,使超级电容的充放电功率与列车的运行功率相匹配。
双向DC-DC装置在降压充电模式下低压侧电压UL和在升压放电模式下高压侧电压UH分别为
UL=DdUH
(9)
UH=UL/(1-Du)
(10)
式中,Dd为降压占空比;Du为升压占空比。
该系统控制模块将动态变化的占空比输入到PWM发生器,通过PWM发生器输出矩形脉冲信号到隔离驱动电路,驱动双向DC-DC变换器主电路模块的IGBT功率管,经滤波后形成充电或放电所需直流电。该系统通过设置工作模式切换的阈值区间来改变控制方式。
3.3 超级电容等效计算
超级电容可等效为内阻r与理想电容c组成的串联RC电路[14],等效电路如图7所示。根据等效电路,超级电容实际的电压值Uc计算为
Uc=USC-ILr
(11)
式中,USC为超级电容模块端口电压值;Uc为超级电容实际电压值;r为超级电容等效内阻阻值。

图7 超级电容等效电路Figure 7. Super capacitor equivalent circuit
3.4 限流环节
超级电容在充电过程中,由于其等效内阻阻值较小(r→0),会产生一个较大的冲击电流Imax。针对此问题,对超级电容充电时接入限流电阻R(选用列车原有1 Ω制动电阻)。因限流电阻阻值R≫r,所以限流后冲击电流为
(12)
在放电过程中,如果限流电阻R常接在电路中,会产生能量损耗和电压降,因此在限流电阻上并联一个二极管,使超级电容充电时通过限流电阻进行充电,超级电容放电时通过二极管进行放电。放电时超级电容等效为内阻很小的电源,放电时的电流通过放电控制策略进行限制。
在列车进行维修或长时间停车前,应控制限流环节中IGBT导通。将限流电阻R与超级电容串并联储能单元并联,实现超级电容组放电至0 V,保证列车和人员安全,如图8所示。
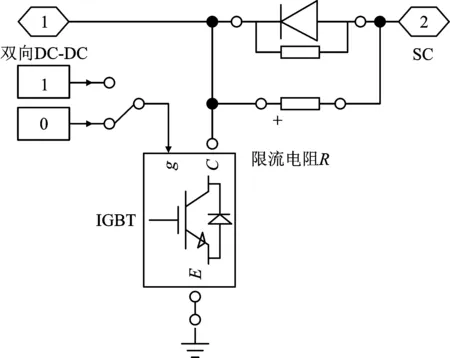
图8 超级电容充电限流环节Figure 8. Super capacitor charging current limiting link
3.5 超级电容充电策略
超级电容有多种充放电策略,例如恒流、恒压、恒负载、恒功率等[15]。这些常用的充放电策略均针对超级电容充放电。
因为双向DC-DC变换器控制目标是维持UH稳定,所以超级电容充放电功率均受列车运行功率限制。为实现制动能量的平滑回收与利用,本文提出的超级电容充放电控制策略的重点在于列车运行功率。
充电时,DC-DC装置低压侧电压UL即为超级电容组的充电端电压,由此可得超级电容组充电功率为
PSC=ULIL=UL(UL-Uc)/(R+r)
(13)
保持Udc不变即Udc=UH,则列车制动功率等于超级电容充电功率Pm=PSC,可推得
(14)
根据式(8),双向DC-DC装置充电降压占空比为
(15)
由式(15)可知,双向DC-DC装置充电降压占空比随着超级电容实际电压Uc和制动时列车电流I不断进行调控。
制动能量回收时,电制动能量不仅可给本车辅助供电(Paux),还可为同一供电区间内其他相邻列车供电(Pother),所以超级电容可只吸收大部分电制动电能,以减少超级电容单体的使用数量。此时超级电容需要吸收功率为
PSC=Pm-Paux-Pother
(16)
因此式(15)中制动时列车电流I需要优化为式(17)。
I*=(Pm-Paux-Pother)/Udc
(17)
3.6 超级电容放电策略
因为超级电容容量有限,所以在保证牵引网电压不会被抬高的前提下优先利用超级电容供电,使超级电容尽可能处于低储能状态,从而有足够的空间来回收电制动能量,避免造成牵引网过压故障。
当列车运行所需的功率小于或等于超级电容组电路所能输出最大电流ILmax的功率时,可实现列车牵引网电压稳定,即双向DC-DC变换器高压侧输出电压UH=Udc,占空比根据式(9)随着UL不断进行调控。
在超级电容放电过程中,随着Uc不断下降,Du需要不断增大,而且随着牵引功率的增加,高压侧输出电流IH也在不断增大,超级电容输出电流IL迅速增大,输出电流为式(18)。
IL=IH/(1-Du)
(18)
当列车运行所需的功率大于超级电容组电路所能输出最大电流功率时,双向DC-DC装置采用PID控制(Packet Identifier)微调环节控制占空比,向下微调UH[16]。按照超级电容组最大所能承受的放电电流向列车回馈能量,其PID控制环节偏差及控制规律如[17]下式所示。
e(t)=IL(t)-ILmax
(19)

(20)
城轨列车使用的IGBT额定电压值为3 300 V,80 ℃时的额定电流值为800 A,所以设定最大电流值为ILmax=800 A。
4 模型仿真试验
采用模拟软件MATLAB/Simulink对本文提出的制动能量回收利用系统的控制方法建立系统模型,系统设计参数如表1。
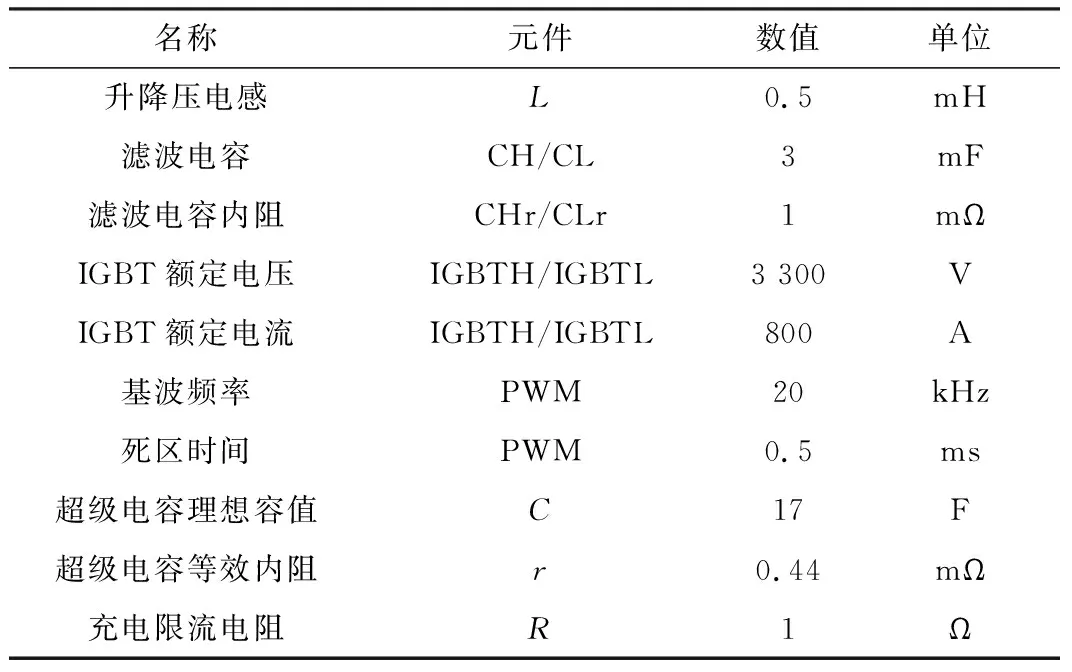
表1 制动能量回收利用系统设计参数
双向DC-DC变换器处于降压模式时,升降压电感电流临界连续的最大值为7.5 A。列车制动时超级电容充电电流大于7.5 A时可实现连续电流充电,且充电电压最大振幅为58.6 mV。在升压模式时,电感电流临界连续的最大值为18.75 A,高压侧电压最大振幅为2 V,因此在列车运行过程中,制动能量回收利用系统的双向DC-DC变换器可以稳定工作。
为了检验本文提出的制动能量回收利用系统的控制方法在不同工况下平抑电压波动的有效性,现以上海轨道交通3号线数据进行数值仿真,仿真参数见表2。

表2 列车运行参数
仿真结果如图9所示。根据列车运行状态,将图9分为7个阶段:0~11 s(阶段1)为恒功率制动;11~21 s(阶段2)为恒转矩制动;21~23 s(阶段3)为停车,23.0~27.3 s(阶段4)与27.3~34.1 s(阶段5)为恒转矩牵引;34.1~38.9 s(阶段6)与38.9~45.0 s(阶段7)为恒功率牵引。

图9 系统仿真运行结果Figure 9. System simulation results
牵引网电压波形中实线为同等运行状态下,使用制动电阻策略的牵引网电压波形UHR,虚线为使用本文控制策略牵引网电压波形UHC。超级电容充放电电流波形中,虚线为DC-DC装置低压侧电压UL波形,实线为超级电容实际电压Uc波形。
在列车制动过程中,在采用制动电阻方案的情况下,牵引网电压UHR在1 650~1800 V之间波动。而采用本文提出的车载式制动能量回收利用系统及超级电容充放电控制策略方案后,在超级电容充电时,Uc不断增大,可保持牵引网电压UHC始终稳定在1 490 V。
列车牵引过程中,在采用制动电阻方案的情况下,牵引网电压UHR逐渐下降,列车进入恒功率牵引时维持在最低值1 263 V。采用本文提出的车载式制动能量回收利用系统及超级电容充放电控制策略方案,在超级电容放电时,牵引运行前段(阶段4)内UHC保持不变,持续5.5 s,占整个制动进程25%。随着超级电容放电电流达到限流值(阶段5),UH开始降低。由于超级电容储存的能量只能提供部分牵引所需能量[18],到阶段7时,超级电容电压已达到最低,停止放电。在整个放电过程中,因为超级电容向列车运行正向功率补偿,所以UHC一直大于UHR,占整个制动进程76.4%。因此,本文提出的车载式制动能量回收利用系统及超级电容充放电控制策略方案可以最大限度抑制电压波动。
在列车运行过程中,超级电容串并联组电压由50 V充电到电压为710 V后放电,电流均控制在807 A内。制动过程产生电量3.92 kWh,辅助设备用电0.594 kWh,限流电阻吸收2.086 kWh,超级电容吸收1.24 kWh,超级电容吸收能量占制动总能量31.5%,说明方案能安全有效地回收制动能量并进行利用,减少了能量浪费。
5 结束语
建模仿真实验表明,本文提出的车载式制动能量回收利用系统及超级电容充放电控制策略方案动态特性良好,响应快,输出电压稳定,输出电流符合要求,能在有效回收利用列车制动能量的同时抑制牵引网电压波动,改善列车用电品质,为列车制动能量回收利用提供了有效方案。相比原有电阻制动和再生制动处置制动能量方案,本方案可以节约制动电阻耗散部分的能量,并有效降低由于泵升电压引起的列车高压故障发生,有较好的优越性。
本文所提出的制动能量回收利用系统,在有效回收制动能量与抑制牵引网电压波动基础上,需要使用较多的超级电容组。后续可针对列车制动能量回收用超级电容阵列的配置策略进行研究,降低方案中超级电容的使用数量。
超级电容回收的制动能量还可以为应急牵引或空调应急工作供电,用来解决洗车线或无供电线路下低速运行的用电问题,后续还可针对这方面进行拓展研究。
