基于BP神经网络的小角度井斜方位角误差补偿研究
2022-05-28丁慧慧邵婷婷
丁慧慧,邵婷婷,2,乔 曦
(1.延安大学 物理与电子信息学院,陕西 延安 716000;2.陕西省能源大数据智能处理省市共建重点实验室,陕西 延安 716000)
井眼轨迹的控制精度对提高油气产量尤为重要。定向井井眼轨迹误差主要来自施工现场的测量数据误差[1]。测斜仪可测量出井眼轨迹,计算所需的井斜角和方位角,其测量结果直接影响到井眼轨迹的可靠性。影响测斜仪精度的因素包括传感器数据测量精度、传感器安装误差[2]和计算姿态的数学模型误差、传感器温度漂移等[3]。方位角是井眼轨迹上某点切线方向在水平面的投影与磁北方向的夹角[4],反映了被测井眼偏离磁北方向的程度。测斜仪方位角的测量范围为0°~360°。国外测斜仪方位角的测量精度为±1°[5],陕北石油基地广泛使用的磁性电子测斜仪方位角的测量精度为±2°。在井斜角较小时,方位角的姿态提取计算式中分子和分母都将同时趋于零[6],降低了测量精度,其误差与常规井斜时方位角误差相比更大。
在提高测斜仪测量精度方面,研究人员进行了大量的研究。文献[7]通过姿态解算对安装误差进行校正,从理论上构建静态的数学模型及存在安装误差时的数学模型,并利用仿真软件构建物理模型验证测试精度。文献[1]将光纤陀螺随钻测斜仪测量结果的不确定性传递到井眼轨迹的不确定性,提出了基于误差传递函数的井眼轨迹校正方法,校正后的井眼轨迹精度可提升一个数量级。文献[8]针对矿井磁阻式测斜仪经过铁磁性物质干扰后会出现方位角测量不准确的情况,通过建立全空间误差校正表模型,用两次线性插值的方法计算出方位角校正系数,最后用该校正系数校准实际测量的方位角。使用该方法校正后,方位角的误差明显降低。文献[9]考虑到随钻测斜仪姿态测量模块多传感器之间校正对准、传感器坐标系与载体坐标系的校正对准等问题,建立基于递推最小二乘的误差补偿数学模型,采用椭球拟合法、点积不变法和旋转平面拟合法的联合校正方法完成对随钻测斜仪的校正,校正后测量精度提高了一个等级。
神经网络技术是近年来发展较快的智能补偿校正技术之一,它不需要建立准确的数学模型[10],也不需要考虑误差来源,只需要对大量的测试数据与理论数据进行学习,找到输入到输出的映射关系,通过神经网络强大的非线性拟合能力预测输出[11]。神经网络在油井测斜误差校正方面的研究比较有限。文献[12]基于径向基函数(Radial Basis Function,RBF)神经网络对1°~70°井斜下方位角误差建模补偿,并将补偿结果与双线性插值结果进行比较。大部分情况下RBF神经网络效果优于双线性插值法,但需要大量建模数据才能保证精度。
反向传播(Back Propagation,BP)神经网络能较好地预测未知样本,因此本文建立BP神经网络模型针对小角度井斜(5°~10°)下测得的方位角进行校正。仿真实验结果表明,该BP神经网络误差校正模型泛化能力强,误差补偿效果较好,可将小井斜下方位角的测量精度从±5.3°提高至±1.7°以内。
1 BP神经网络原理
1.1 BP神经网络模型
BP神经网络具有强大的非线性映射能力[13],其按照误差逆向传播算法训练,属于有监督学习。BP神经网络由输入层、隐含层和输出层组成[14]。隐含层传输函数可用S型转移函数logsig或tansig。输出层为线性层,使用传输函数purelin。输出层有一个标准的期望输出值,使用newff函数创建网络后对权重进行初始化,逐层传递输出值。将输出值与标准值的误差设为损失函数,若损失函数未达到要求精度便将误差反向传播,通过调整权重与偏置来缩小输出值与标准值误差,直到误差减小到可接受的程度或达到迭代次数[15]。BP神经网络结构图如下图1所示。

图1 BP神经网络结构图Figure 1. Structure chart of BP neural network
图1中,x1、x2为输入变量,w11,w12,…,w1n,w21,w22,…,w2n为输入层与隐含层之间的权值wij,b1,b2,…,bn为各隐含层的阈值,hout1,hout2,…,houtn分别为各隐含层神经元的输出。将隐含层激活函数设为f,则有
hout1=f(x1×w11+x2×w21+b1)
(1)
hout2=f(x1×w12+x2×w22+b2)
(2)
⋮
houtn=f(x1×w1n+x2×w2n+bn)
(3)
用矩阵形式表达为式(4)。
hout=f(wij×x+b)
(4)
将隐含层与输出层之间权值用wjk表示,阈值为θ,输出层激活器函数为g,神经元输出为Y,标准输出为T,输出层误差为E,则有式(5)和式(6)。
Y=g(wjk×hout+θ)
(5)
E=(T-Y)2
(6)
1.2 BP神经网络的训练过程
BP神经网络的训练过程包含前向传输和逆向反馈,网络训练过程的流程如图2所示。
推荐理由:本书由雀巢童书奖评委会主席,朱莉娅·埃克谢尔主持编选。她邀请世界各地三十余位杰出的作家与插画家共襄盛举,对人类历史上最优秀的童书进行梳理,甄选了1001种被广泛认可的童书,并加以解读与评介。本书为父母和孩子展现一个丰富多彩的世界,是一部可以摆在所有家庭书架上的理想参考书,是可以陪伴孩子成长的贴心礼物。
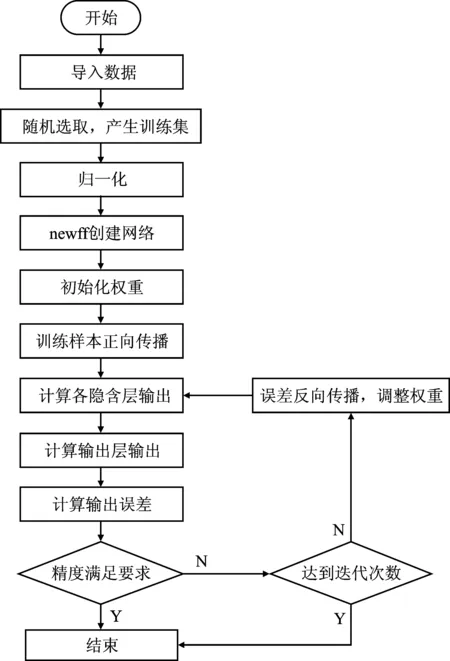
图2 BP神经网络的训练过程流程图Figure 2. Flow chart of training process of BP neural network
调整权重的过程采用梯度下降法,可类比于下山的过程,若要一步一步走向山底,只需求解当前位置的梯度,沿着梯度的负方向向下走一步,循环这个步骤直至走到山底。由于损失函数是自变量为权重与偏置的非线性函数,在神经网络中需要找到损失函数的最小值。梯度是损失函数对权重和偏置求偏导。沿着梯度向量相反的方向为梯度下降最快的方向。根据微积分的链式规则,梯度可表示为
(7)
由输出层神经元输出与输出层误差的计算式可以得到

(8)

(9)
由此输出层误差可展开至隐含层,如式(10)所示。

(10)
更新的权重即为原先权重减去当前梯度的值。为了更加平滑地改变权重使用学习率l,隐含层与输出层权重更新为式(11)。
(11)
隐含层误差同样可展开至输入层,但隐含层没有标准值。可根据隐含层与输出层的权重wjk拆分输出误差E,并为每个隐含层节点重新组合误差[16]。隐含层输出误差如式(12)所示。
errorhout=wjkT×E
(12)
隐含层误差展开至输入层,如式(13)所示。
(13)
隐含层与输出层权重更新为式(14)所示。
(14)
2 BP神经网络误差补偿模型建立
对小角度井斜下方位角测量进行误差校正,首先建立以实测井斜与方位角为输入,以理论方位角为输出的神经网络模型。这里在井斜角为5°、 5.4°、5.8°、6°、6.3°、6.7°、7°、7.4°、7.8°、8°、8.3°、 8.7°、9°、9.3°、9.8°、10°时,方位角在0°~ 360°时,每隔30°获取取样测试点。将井斜角与对应实测方位角构成的192组二维输入数据保存在工作区内,同时将理论方位角作为一维输出保存在工作区中。导入数据后,利用randperm函数使训练集在工作区中随机选取产生,并将剩余的一小部分作为测试集用来测试模型泛化能力。本文分别对训练集与测试集作归一化处理,以免影响训练速度与精度[17]。
2.1 BP神经网络结构的确定
一般单隐层神经网络可逼近任何连续函数[18],若提高隐层层数或隐层神经元个数会使神经网络容量变大,空间表达力变强。但隐含层层数过多会产生过拟合问题,应进行多次调整试验,这里选用3层,即隐含层层数为两层。隐含层节点数=(输入层节点数+输出层节点数)1/2+(0 ~ 10),利用试凑法将两个隐含层节点数定为2和9。输出层节点数根据一维输出数据定为1个。各层传输函数为tansig、tansig、purelin,并指定训练参数为trainlm。
2.2 设置训练参数
经过多次尝试与训练后发现,将训练次数设置为10 000,训练目标设置为10-5时的建模时间为1 s。经92次迭代后训练结束,补偿精度为9.89×10-6。该条件下,收敛速度快但补偿效果不好,补偿后最大误差为4.428 7°。将训练次数设置为10 000,训练目标设置为10-6时,运行时间会稍长,但误差补偿可控制在2°以内。从误差补偿的效果,来看这种代价是值得的。因此,本文将训练次数设置为10 000,训练目标设置为10-6。学习速率类似于下山过程中的步长,步长过大会在一直徘徊在最低点附近产生动荡,从而无法收敛;步长太小则容易落入错误的函数最小值。经多次试验将学习速率设置为0.01。为了避免落入错误函数最小值,可使用不同的权重初始值训练网络。
3 训练结果与分析
井斜角分别为5°、 5.4°、5.8°、6°、6.3°、6.7°、7°、7.4°、7.8°、8°、8.3°、 8.7°、9°、9.3°、9.8°、10°时,随机选取180组方位角数据作为训练样本。这些井斜角下具有最大误差的方位角测量值、标准值及其误差如表1所示。

表1 井斜角下具有最大误差的方位角样本
学习样本的选择既反映了测斜仪输出数据的特点,也涵盖了小井斜(5°~10°)方位角的测量范围[19]。由表1可以看出,测斜仪在井斜为6.7°,方位角为270°时误差绝对值最大,最大为5.3°。
将训练集和测试集的所有方位角数据均作为建立的BP神经网络误差校正模型的输入,来测试该模型的误差校正精度。由于每次运行产生的方位角训练样本不同,校正模型权值和阈值的初始值不同,方位角的误差校正精度也略有不同。运行10次的测试结果表明,方位角的误差均可控制在±2°以内,平均误差为1.04°,运行结果比较稳定。取接近于平均误差的一次进行分析,分为训练集方位角误差测试和测试集方位角测试。
此次训练集方位角训练点与对应的误差在补偿前后的对比如图3所示。

图3 训练集方位角训练点的误差对比Figure 3. The error comparison of azimuth training point in training set
由图3可以看出,训练集补偿前最大误差绝对值为5.3°,补偿后最大误差绝对值未超过2°,训练集精度由±5.3°提高至±1.614 48°,训练效果较好。
测试集方位角训练点与对应的误差在补偿前后的对比如图4所示。
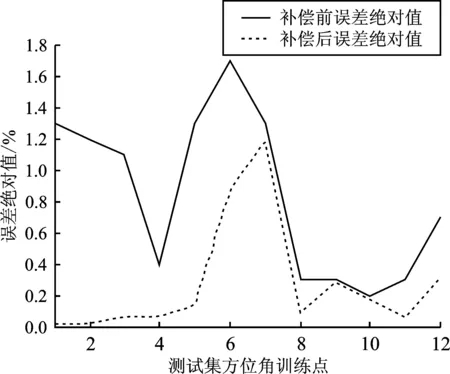
图4 测试集方位角训练点的误差对比Figure 4. The error comparison of azimuth training point in test set
由图4可以看出,测试集补偿前最大误差达到1.7°,经训练好的BP神经网络校正后的误差由±1.7°缩减到±0.869°;第7个样本点处误差绝对值由±1.3°补偿到±1.188°;测试集最大误差绝对值为1.188°,补偿效果较好,模型泛化能力较强。
4 结束语
针对陕北地区常用的磁性电子测斜仪在小角度井斜(5°~10°)下,方位角测量误差相对常规井斜更大而导致测量精度不高的问题,本文基于BP神经网络算法建立误差校正模型,对测斜仪在5°~10°小角度井斜下方位角的测量数据进行补偿校正。本文建立了以实测井斜角和方位角为输入且以理论方位角为输出的双入单出网络模型,用训练好的模型对训练集和测试集数据均进行仿真测试。测试结果表明,该BP神经网络误差校正模型可将小井斜下方位角的测量精度从±5.3°提高至±1.7°以内,测量精度得到改善,误差补偿效果较好。
