某型无人机机载数据存储器无法存储侦察影像数据故障分析
2022-05-20孙辉郭忠诚宁娟吉彩妮
孙辉,郭忠诚,宁娟,吉彩妮
1.贵州贵飞飞机设计研究院有限公司
2.中航贵州飞机有限责任公司
针对某型无人机机载数据存储器无法存储侦察影像数据的情况,本文对故障进行分析和定位,并从设计原理进行剖析,对故障进行复现,最终提出故障解决措施,并对解决措施进行验证。
某型无人机机载数据存储器是某型无人侦察机系统配置的数据记录设备,在机载环境下实时记录某型无人侦察机系统在执行任务过程中产生的飞行参数数据、导航数据、光电吊舱侦察影像数据。当无人机完成飞行任务并返回地面后,操作人员使用地面转储设备,将存储器存储的数据信息转存至地面计算机。所存侦察影像数据可用于情报生成、分析、处理,毁伤效果评估和目标识别,对提高无人侦察机整体作战效能,保障侦察情报连续性和准确性具有重要意义。
故障概述
某型无人侦察机机载数据存储器随全机系统联试过程中,在执行侦察影像数据存储命令时,出现回报记录速率为0Mb/s的现象,其存储任务持续一段时间后,结束存储工作状态。当操作人员将数据存储器的存储体安装到地面转储设备上查看任务目录时,发现存储器没有生成侦察影像数据的对应任务目录,据此判断某型无人机机载数据存储器工作出现异常。
故障分析与定位
光电吊舱与某型无人机机载数据存储器之间存在1个通信接口和1个数据接口(见图1),通信接口采用异步422串口,数据接口采用Camera Link接口。
(1)故障树分析
针对数据存储器无法存储侦察影像数据的异常情况,本文对故障进行分析与定位,建立故障树(见图2),并制订排查方案。操作人员结合排查方案逐项开展排查试验。数据存储器内部存储模块、主控模块及接口模块出现异常,均会导致数据存储器无法存储侦察影像数据。
(2)故障排查方案
根据故障现象及故障树分析,本文在排查方案中设置4个数据监测节点,并结合设备功能,对不同数据监测节点收到的数据进行比对分析,来确定工作异常的模块。故障排查框图如图3所示。
(3)故障排查过程
①存储模块异常现象排查
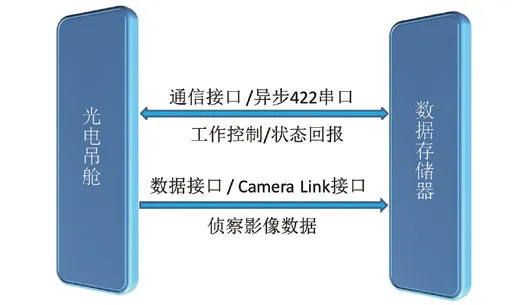
图1 光电吊舱与数据存储器交联关系图。
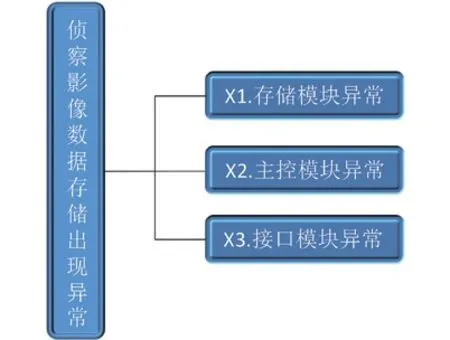
图2 侦察影像数据存储出现异常的故障树。
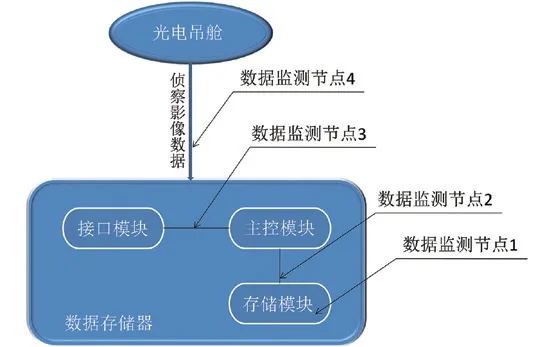
图3 故障排查框图。
若存储模块出现工作异常,记录速率会为0Mb/s。如图3所示,在主控模块的现场可编程逻辑门阵列(FPGA)上产生内部信号源,并通过总线向存储模块发送随机数据,在数据监测节点2探测该随机数据。排查过程中发现,数据监测节点2可以探测到数据,且将在节点2探测到的数据与数据监测节点1处由主控模块产生的随机数据进行比对后发现,节点2和节点1的数据完全一致,因此可以排除存储模块出现故障的可能性,据此可以判断存储模块功能正常。
②主控模块异常现象排查
若主控模块出现异常,会导致存储器无法记录数据。如图3所示,在接口模块FPGA上产生内部信号源,并通过总线向主控模块发送随机数据,在数据监测节点3、数据监测节点2和数据监测节点1处探测该随机数据。排查过程中发现,在数据监测节点3、数据监测节点2和数据监测节点1处均探测到数据。其中,数据监测节点3与接口模块产生的随机数据完全一致,而数据监测节点2和数据监测节点1的随机数据是经过打包处理后的帧格式数据,与技术方案预期设计的结果完全一致。因此可以排除主控模块出现故障的可能性,据此可以判断主控模块功能正常。
③接口模块异常现象排查
若接口模块出现异常,会导致存储器无法记录数据,记录速率为0Mb/s的现象。如图3所示,光电吊舱的侦察影像输出接口与数据存储器对应的Camera Link输入接口相联结。数据存储器启动进入存储工作流程,并且用Signal Tap工具在数据监测节点3,数据监测节点4跟踪和探测光电吊舱输给数据存储器的侦察影像数据。排查过程中发现,数据监测节点4有数据,但数据监测节点3无数据,说明侦察影像数据经过接口模块后,数据并没有被成功采集,从而数据存储器回报记录速率为0Mb/s,且无法生成相应的任务目录。因此接口模块可能出现了故障,即接口模块在采集数据时存在异常现象。
④故障定位
以上故障逐步排查试验表明,故障可定位在接口模块工作异常。
故障机理分析
设计原理
光电吊舱输出的两种侦察影像数据共同占用一个Camera Link输出接口。数据存储器在执行存储命令时,可根据Camera Link输入接口收到的帧数据(由1个帧信号、1个行信号、24bit数据位及1个时钟位构成),完成各类数据采集、打包及存储。数据存储器须根据影像数据的帧、行信号特征,判断出当前输入的影像类型格式后,开始采集打包存储。具体视频数据时序图详见图4。
(1)影像数据格式判别
对于光电吊舱输出的帧数据,当帧有效信号(FVAL)以及行有效信号(LVAL)均为高电平时,数据信号(DATA)是数据存储器所须要的有效视频像素数据。CLK为影像的像素时钟信号,该信号始终有效。
光电吊舱通过Camera Link输出接口传送帧数据,数据存储器接口模块会在帧、行信号有效时,对数据信号的分辨率进行判断。在帧有效信号以及行有效信号均为高电平时,对数据的同步时钟进行计数,以行有效信号的上升沿为起点,下降沿为终点,累计的数据时钟总数即为图像的横向分辨率,以帧有效信号的上升沿为起点,下降沿为终点,累计的行信号总数为图像的纵向分辨率。根据接口控制文件要求,影像数据1的分辨率为M×N,影像数据2的分辨率为X×Y。因此,当FPGA的横向分辨率计数值和纵向分辨率计数值分别为M,N时,则判定当前输入的影像为影像数据1;当FPGA的横向分辨率计数值和纵向分辨率计数值分别为X,Y时,则判定当前输入的影像为影像数据2,其他输入则视为无效影像数据。

图4 视频数据时序图。
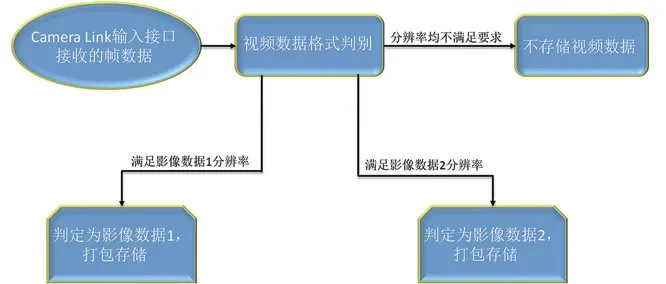
图5 接口数据分辨率判断流程。
(2)数据打包存储
当数据存储器接口模块完成影像数据格式判别后,存储器开始对两种侦察影像数据进行存储。图6以影像数据1为例,对数据打包存储流程进行说明。
当光电吊舱Camera Link输出接口传送的帧数据被判定为影像数据1时,主控模块产生记录使能,对影像数据1进行存储。首先,在这个帧数据前添加特定字节的帧头,用于任务管理;而后在帧有效信号以及行有效信号均为高电平时,存储器存储固定比特数的有效像素数据,同时对数据的同步时钟进行计数,以进行帧格式的控制。计数以帧有效信号为高电平时,行有效信号的上升沿为起点。当计数值达到M时,表示这一行结束,将像素计数清0,行计数加1;当某一行像素计数达到M且行计数达N时,表示这一帧影像数据已经完成存储,计数结束,开始新一帧的计数和数据存储。
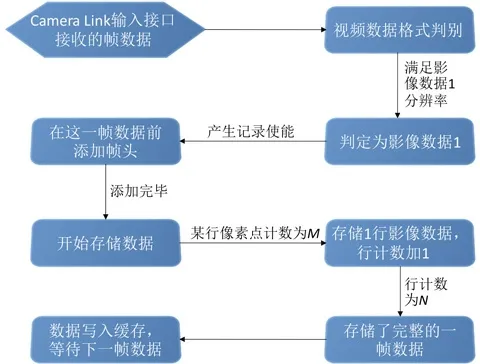
图6 侦察影像数据存储流程图。
故障原因分析
使用FPGA的Signal Tap工具跟踪、探测光电吊舱传输给数据存储器的侦察影像数据时发现,当光电吊舱切换到影像数据1输出模式时,数据存储器端采集的横向分辨率数值为M+1,纵向分辨为N,不符合接口控制文件规定的M×N分辨率的技术要求;当光电吊舱切换到影像数据2输出模式时,数据存储器端采集的横向分辨率数值为X-1,纵向分辨为Y,不符合接口控制文件规定的X×Y分辨率的要求。由于数据存储器识别不到符合接口控制文件规定的侦察影像数据分辨率,影像采集存储不能正常启动,导致存储模块在执行存储命令时,出现了记录速率为0Mb/s的现象。当存储结束后,操作人员将存储体安装到转存设备上查看任务目录时发现,存储器没有形成相应侦察影像数据的记录任务目录。
根据故障排查结果,并结合机理分析与原因分析,数据存储器无法存储侦察影像数据有两方面原因,一是光电吊舱输出的侦察影像帧数据格式不符合接口控制文件规定的分辨率要求;二是数据存储器接收侦察影像数据的容错能力不足。
解决措施及验证
故障原因被确定后,操作人员调整光电吊舱的输出时序,使用FPGA的Signal Tap工具跟踪、探测光电吊舱传输给数据存储器的侦察影像数据,在影像数据1和2两种输出模式之间切换,使光电吊舱的输出时序满足接口控制文件约定的影像分辨率要求后,数据存储器的故障消失,侦察影像数据可以被正常存储。同时,考虑到机载电磁环境有可能对光电吊舱的时序产生干扰,数据存储器应增加容错功能,当输入的侦察影像数据时序出现微量波动时,不影响存储器对影像类型的识别。在程序设计上,将横向分辨率及纵向分辨率容错指数设定为±2,即当数据存储器识别出光电吊舱输入的影像分辨率为(M±2)×(N±2),则认为当前输入的影像为影像数据1;当数据存储器识别出光电吊舱输入的影像分辨率为(X±2)×(Y±2),则认为当前输入的影像为影像数据2。程序设计完成后,光电吊舱产生满足分辨率容错指数设定值范围内的数据信号,并传输给数据存储器,数据存储器如果能够完成相应数据存储,证明容错功能有效。
结论
本文提出的解决方法可排除某型无人机机载数据存储器无法存储侦察影像数据的故障,保证某型无人机系统的研制进度,提升数据存储器工作的可靠性。从故障原因分析和采取的技术解决措施看,在无人机研制过程中,特别是面对不确定、复杂的机载电磁环境,技术人员应严格执行系统接口控制文件并为数据存储器新增容错功能,这对后续具有类似功能的机载设备研制具有重要借鉴意义和参考价值。
