基于PFT-COI方法的无人侦察机作战效能指标体系构建
2022-05-20许钦羡廖学军初欣阳
许钦羡,廖学军,初欣阳
1.航天工程大学
2.特种作战学院
3.32116部队
为解决无人侦察机作战效能评估指标设计中实战指向性不强的问题,本文提出基于PFT-COI方法的作战效能指标体系构建方法,首先介绍PFT方法和COI效能指标分解方法的基本原理,以及两者之间的差异性与关联性;其次基于PFT-COI方法,对无人侦察机作战流程进行分析,明确任务流程中的关键作战问题,解析关键作战问题所须的效能指标;最后构建无人侦察机作战效能指标体系,为相关单位后续开展作战效能评估奠定基础。
目前,研究人员尝试构建具有全过程、多层次、多属性等特征的指标体系,以求更加全面地描述无人侦察机的作战效能。针对不同的装备系统,研究人员须选择相应的分析方法构建作战效能指标体系。一些学者对具有明确任务过程的装备系统进行研究,提出了基于PFT(Process-Focused Thinking)的指标体系构建方法,通过研究和分析装备系统的作战流程剖面,构建作战效能指标体系,但是该方法侧重于任务剖面分析,缺少对效能指标分解的研究;另有学者从装备系统的关键作战问题(Critical Operational Issues,COI)入手,参考美军《指标开发标准实施程序》中的使命分解方法,构建装备系统作战试验指标体系,此方法对效能指标开发过程进行大量分析,对如何从装备系统作战任务得到关键作战问题的分析相对较少。针对上述问题,本文试从PFT方法和COI效能指标分解方法的差异性与关联性着手,将PFT方法和COI效能指标分解方法相结合,以弥补单一方法的不足,并根据无人侦察机作战任务特点,构建基于PFT-COI方法的无人侦察机作战效能指标体系。
PFT方法的基本原理
PFT方法也称过程中心法,是以过程为中心,建立综合效能评估模型,其中,过程是指系统执行规定任务的完整流程。该方法对装备系统作战流程剖面进行分析,以不同分系统的单项功能在各个任务阶段的有序工作表示复杂任务的执行情况,即PFT方法将装备系统的作战效能评估转化为作战任务完成所须分系统性能的综合度量。有学者根据装备系统的总体作战任务流程,提出了基于PFT的效能指标分析方法,PFT方法的主体思路包括分解—转换—约束—聚合四个阶段,如图1所示。
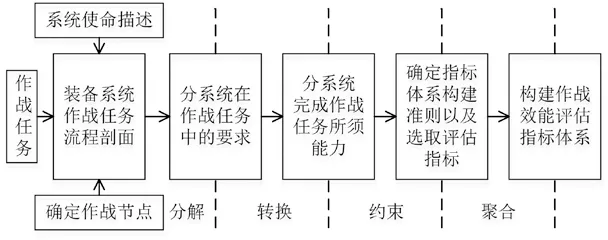
图1 基于PFT方法的指标体系构建流程图。
COI效能指标分解方法的基本原理
美军《指标开发标准实施程序》提出的COI效能指标分解方法是,在过程分解、相互映射中使用一系列矩阵模型,来实现从使命目标到关键作战问题,再到作战能效指标的分解,以及作战效能指标体系构建,如图2所示。COI效能指标分解方法以映射矩阵系列模型构建多级映射关系,实现从作战需求到可测性能的层层分解,得到的性能指标可以逐级追溯到效能指标,再到关键作战问题,最后到使命目标。例如,矩阵模型A采用使命目标行和关键作战问题列构建使命目标—关键作战问题映射矩阵模型。如果使命目标行与关键作战问题列相关,在映射矩阵模型A中相对应的交叉格内填加字母C(C代表相关性,Correlation),表示使命目标与关键作战问题相互关联。按照图2中A、B、C映射矩阵模型的顺序,逐级逐项类推分析,形成“使命目标—关键作战问题—效能指标—性能指标”之间的关联过程。
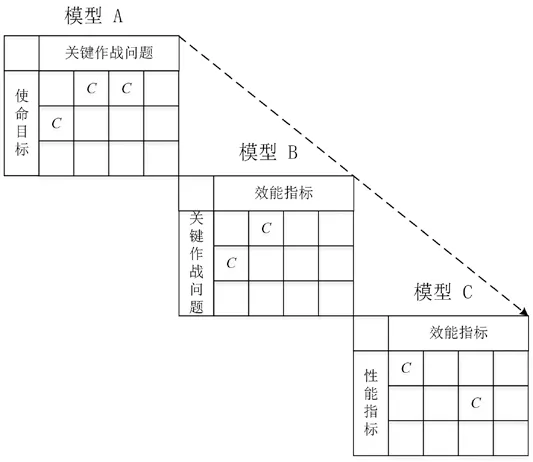
图2 基于COI效能指标分解方法的指标体系构建流程图。
基于PFT-COI方法的作战效能指标设计流程
美军在无人机系统作战试验需求开发中明确了关键作战问题,对无人机系统的作战模式和任务剖面(OMS/MP)进行定义,以确保无人机系统的作战需求和任务描述映射出系统效能指标的完整性、合适性和可测性。同时,PFT方法也是一种将作战任务需求转变为试验内容数据需求的常用方法,通常用于分析、规划关键作战问题。由此可见,PFT方法与COI效能指标分解方法在指标设计过程中有相关性。PFT-COI方法是在PFT方法的分解阶段,引入关键作战问题,在转换—约束过程中运用美军指标开发程序进行指标分析。依据PFT方法的四个阶段内容,将PFT-COI方法重新划分为提炼—转换—分解—聚合四个阶段,如图3。
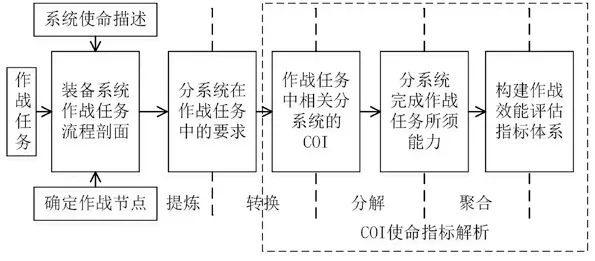
图3 基于PFT-COI方法的效能指标分解过程图。
无人侦察机作战任务剖面分析
基于任务流程剖面的分析,一方面可以明确无人侦察机系统在实战任务行动中所须要的分系统,而分系统在各任务阶段发挥不同的作战能力,反映了不同分系统对作战任务的支持作用,为作战效能指标选取提供客观依据;另一方面,有利于对作战效能的影响因素进行溯源分析,并有助于确定底层指标取值的量化方式与试验方法。
无人侦察机典型作战任务剖面包括六个层次,如图4所示。
第一,上级作战指挥部门将情报需求转化为作战计划,无人侦察机操控人员将作战计划生成对应的指令,把相关数据参数加载到无人侦察机系统,并对整个系统进行测试。
第二,无人侦察机根据任务指令开始巡航,突破敌方防空预警、电磁干扰、火力打击等威胁,直至飞抵任务区域。
第三,任务载荷分系统开机侦察,对任务区域内的目标进行侦察、监视、定位、信息存储和预处理。
第四,无人侦察机根据所处位置及任务时效要求,将获取的数据信息通过视距通信链路直接传输给地面控制站,或通过卫星通信链路间接传输给地面控制站。
第五,地面控制站对侦察数据进行处理,并传送给上级情报中心,情报中心再次对数据进行分析和整理,形成无人侦察机情报产品,以满足作战情报需求。
第六,无人侦察机根据任务指令继续执行侦察任务或返航。
无人侦察机关键作战问题提出
由无人侦察机典型作战任务剖面得到无人侦察机的六个任务流程,即准备与起飞—巡航—规避威胁—侦察监视—信息传输—返航与回收。针对每个阶段中作战部队最为关注的能力需求,本节提出相应的关键作战问题。
(1)准备与起飞、返航与回收阶段的关键作战问题
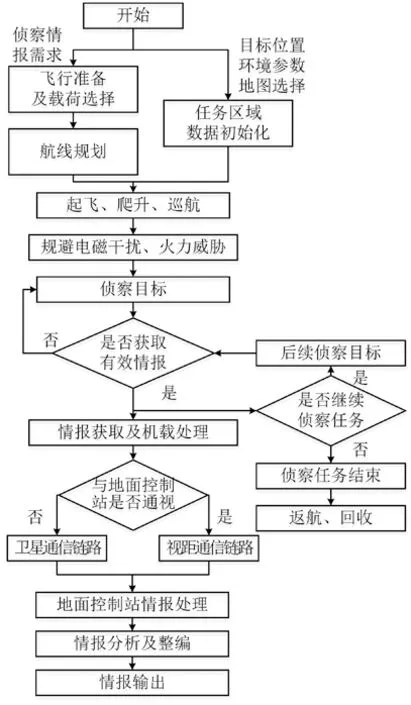
图4 无人侦察机典型作战任务剖面图。
在此阶段,作战部队关注分系统以及无人侦察机系统执行任务前后的可用性、可靠性等问题,并保证无人机顺利起降和回收。本节将这两个阶段的关键作战问题设置为“无人侦察机能否顺利发射与回收”。
(2)巡航阶段的关键作战问题
在巡航阶段,作战人员关注无人机的航程、实用升限、巡航速度、续航时间等指标,这些指标代表了无人侦察机执行作战任务的基础能力。本节将巡航阶段的关键作战问题设为“无人侦察机有效战位时间是多长”。
(3)规避威胁阶段的关键作战问题
在该阶段,作战人员关注无人侦察机系统和任务载荷分系统。在飞往侦察目标区的过程中,无人侦察机会遇到敌方防空预警、电磁干扰和火力打击等威胁,考验着无人机的战场生存能力。本节提出关键作战问题为“无人侦察机能否适应战场环境”。
(4)侦察监视阶段的关键作战问题
在侦察监视阶段,作战人员关注任务载荷分系统。当无人侦察机到达目标区域时,机载任务载荷开机工作,对区域中的目标进行搜索、识别和定位。当确认目标后,无人侦察机开始执行侦察监视任务。本节提出关键作战问题为“无人侦察机能顺利对侦察目标进行定位并搜集目标信息吗”。
(5)信息传输阶段的关键作战问题
在信息传输阶段,作战人员关注数据链路分系统。考虑到无人侦察机执行任务时,与地面控制站之间的距离非常远,以及上级作战部门对侦察目标情报的时效性要求,本节提出关键作战问题为“无人侦察机能否实时传回目标信息”。
(6)地面控制站及配套保障设备测试阶段的关键作战问题
除以上任务阶段,作战人员还须测试地面控制站及配套保障设备的相关能力,以及对无人侦察机全系统进行全面检查。为此,本节加入关键作战问题“作战人员有能力操控和保障无人侦察机系统成功完成任务吗”。
无人侦察机关键作战问题解析
(1)矩阵模型A:构建作战使命目标与关键作战问题的映射关系
对于映射矩阵模型A中的无人侦察机系统作战使命目标而言,关键作战问题是解释使命目标的关键信息。
本节根据如下情况分析矩阵模型A的映射过程。如果被解析的关键作战问题为使命目标完成提供了帮助,那么关键作战问题与使命目标具有一致性。若答案肯定,则使命目标与关键作战问题之间确实存在映射关系。
对装备系统的使命目标进行描述与说明是开发矩阵模型A的前提和基础,而开发矩阵模型A的难点是,如何获取正确的使命目标信息,这取决于可用信息的来源和质量。因此,有必要从权威典籍、相关准则等资料中获取被测试系统的使命目标描述信息。本文在相关文献已查到无人侦察机的使命目标描述信息,即无人侦察机主要对静止和移动目标进行全天时侦察和监视,为所属国家和军队提供目标获取、目标引导、毁伤效果评估等信息。
从权威文献资料中查到使命目标信息后,本节利用上节提出的6个关键作战问题,构建映射矩阵模型A。
矩阵模型A的构建准则是,关键作战问题的数量大于或等于使命目标的数量,即每个使命目标至少被一个关键作战问题映射,每个关键作战问题至少对应一个使命目标。表1为映射矩阵模型A的典型样式,可使用不同的使命目标对映射矩阵模型A进行调整和完善。
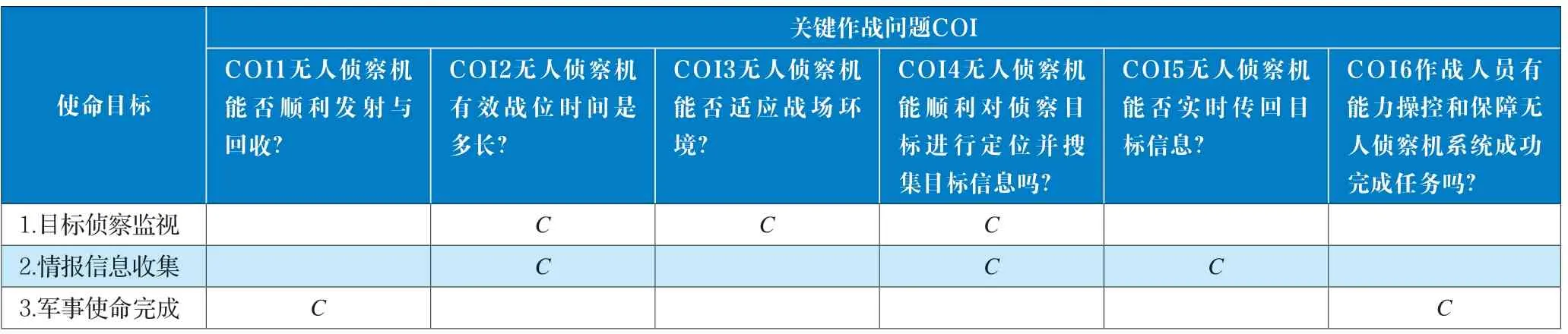
表1 无人侦察机系统映射矩阵模型A。
(2)矩阵模型B:构建关键作战问题与作战效能指标的映射关系
映射矩阵模型B继续对关键作战问题进行分解,并构建关键作战问题与作战效能指标的映射关系。在上一节矩阵模型A的解析中,关键作战问题已得到明确,因此矩阵模型B的关键作战问题行创建工作已经完成,接下来的工作是对作战效能指标列进行确认。一些文献提出,以机动能力、自卫能力、通信能力等指标表征装备系统的作战效能。本文结合无人侦察机所担负任务的特点,选取最适合帮忙解决关键作战问题的作战效能指标,以在矩阵模型B中构建关键作战问题与作战效能指标的映射关系。例如,COI1为无人侦察机能否顺利发射与回收?在7个无人侦察机系统作战效能指标中,出动能力可以回答COI1,因此在矩阵模型B中COI1与出动能力相互交叉的空格内填写C,表示两者之间的相关性。同理,战场环境下的无人侦察机各项效能指标逐个对其他关键作战问题进行回答,以此构建模型B中COI与作战效能指标的映射关系。
矩阵模型B的构建准则是,作战效能指标的数量一般超过COI数量,每个COI至少拥有一个作战效能指标与之相映射。表2为映射矩阵模型B的典型样式,可使用不同的COI对映射矩阵模型B进行调整和完善。
(3)矩阵模型C:构建作战效能指标与性能指标的映射关系
本节利用矩阵模型C,完成指标分解过程中的最后一个映射阶段。对矩阵模型B中的作战效能指标进行分析,可以开发一系列性能指标,这些性能指标可以通过矩阵模型A、B、C的映射记录,逆向追溯到关键作战问题,再到使命目标。
在矩阵模型B中,COI解析出的作战效能指标体现了装备系统的特性,因此性能指标构建的过程一般都从装备系统特性分析开始。如果性能指标属于物理特性,例如机动性,那么须要对装备系统的相关物理量(通常为定量指标)如巡航速度进行测试;如果性能指标属于某种行为特性,例如“士气”,那么须要对基于心理状态变化而产生的行为或者某些合成动作等定性指标进行测试,如战斗决心。在后续开展作战效能评估时,定性指标的测试结果不便于进行量化处理,可将其转换成范围或程度进行评估,例如,“操控人员与装备的结合程度是否对作战任务完成产生影响?”,测试结果无论为是或者否,在后续作战效能评估中均不便进行量化处理,可将该问题转换成“在某种程度的人装结合下,装备适应战场环境并完成任务的比例”,那么测试结果便能得到量化处理。因此,在矩阵模型C中对抗能力与人装结合度相交叉的空格内填入C,表示两者之间的相关性,依此构建矩阵模型C中其他作战效能与性能指标的映射关系。

表2 无人侦察机系统映射矩阵模型B。
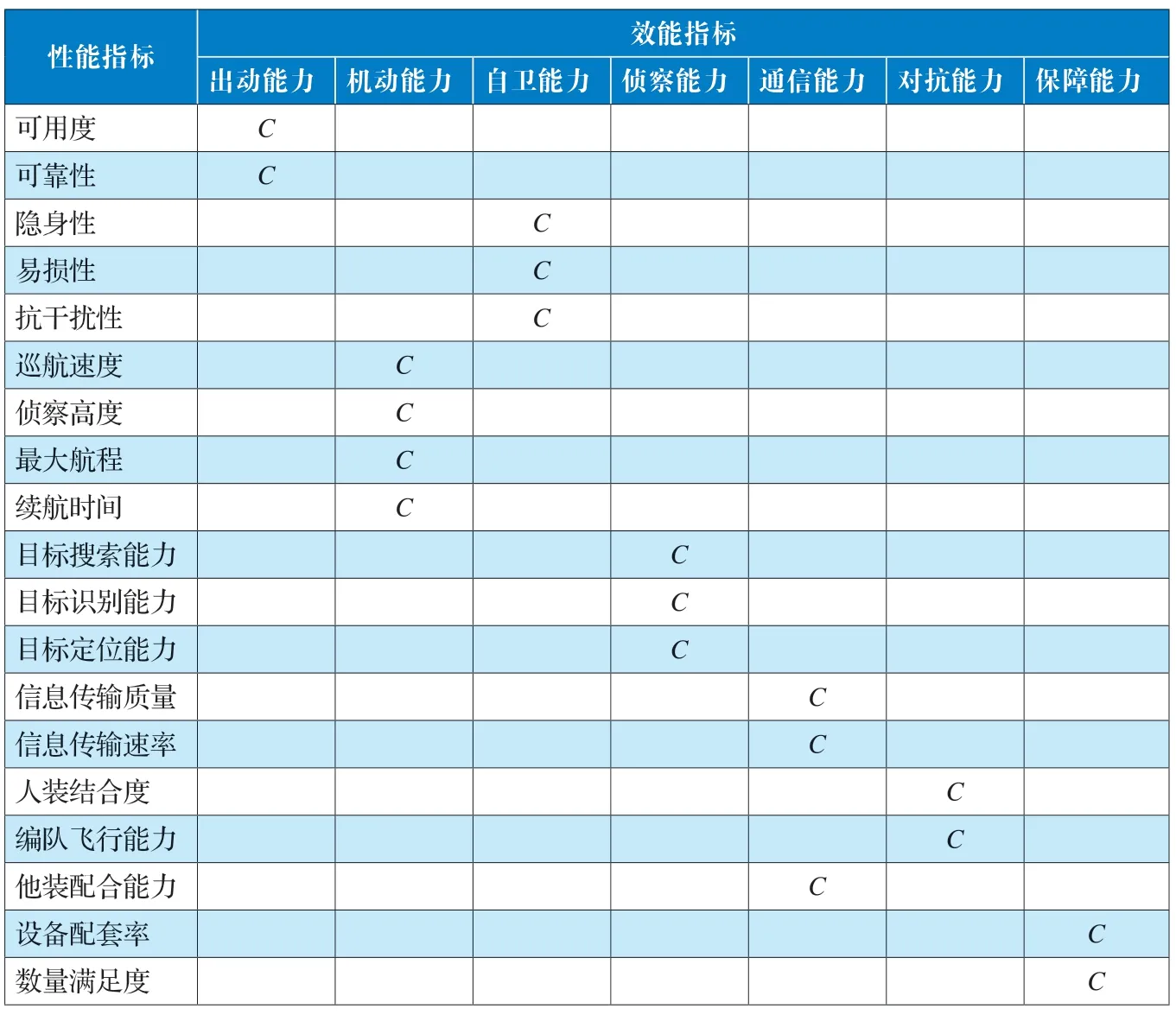
表3 无人侦察机系统映射矩阵模型C。
矩阵模型C的构建准则是:每项作战效能至少对应一个明确的性能指标,每个性能指标的内涵特点鲜明,其测试结果能够对装备系统的物理量或行为特性进行评估,但是要避免指标间出现界限模糊不清、冗余重复或交叉包含等问题。表3为映射矩阵模型C的典型样式,可根据不同情况调整和完善映射矩阵模型C。
作战效能指标体系构建
根据无人侦察机系统典型任务剖面,本文提出关键作战问题,通过映射矩阵模型A、B、C对关键作战问题进行分解,得到无人侦察机系统作战效能指标体系,详见表4。本文构建的效能指标体系层次结构划分清晰,得到的各级性能指标与关键作战问题具有可追溯性。

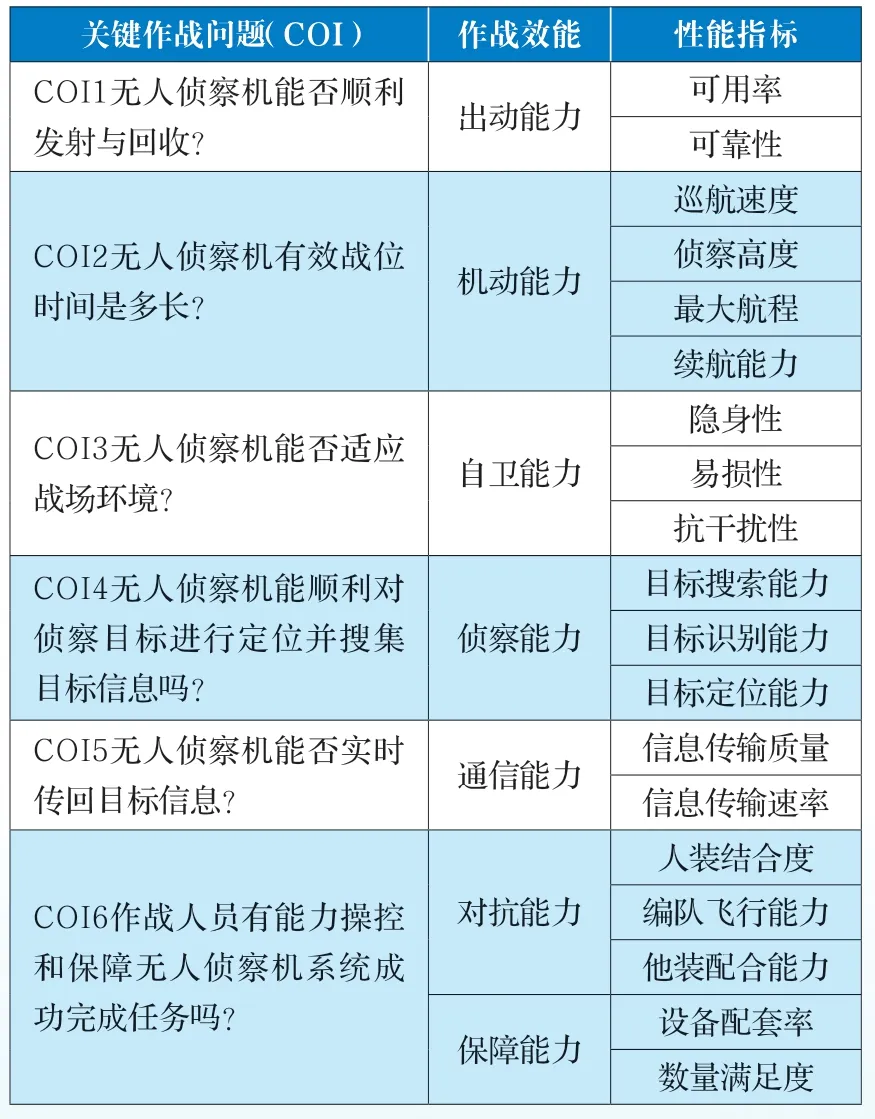
表4 无人侦察机系统作战效能指标体系。
总结
本文根据无人侦察机典型作战任务剖面,建立基于PFT-COI方法的作战效能指标体系。该体系包括关键作战问题、作战效能指标、性能指标三个层级,阐明了无人侦察机系统从作战需求到指标分解的全程。本文创建的作战效能指标体系既能追溯无人机的作战使命目标与需求,使作战效能指标更好地聚焦实战运用,又分解出具有独立性与可测性的底层性能指标,为相关研究人员后续开展作战效能评估奠定基础。
