基于网联车辆信息的路口信号配时优化方法
2022-05-18魏吉敏
魏吉敏
(长沙智能驾驶研究院有限公司, 长沙 410218)
0 引言
随着城市发展越来越快,城市内的车辆也越来越多,交通变得日益拥堵,传统的信号灯控制方法越来越不能满足城市发展的需要. 自从1960年计算机开始应用于交通信号灯的控制,到目前出现了不同类型的交通信号控制系统,其中最著名的是英国研制的SCOOT系统、澳大利亚的SCATS系统等. 国外的交通信号控制系统功能强大,在设计阶段考虑周全,因而价格较贵. SCOOT系统通过埋设在上游路口的车辆检测器跟踪车辆的运动情况,通过有优化程序找出信号配时参数的最佳组合. SCATS系统的车辆检测器安装在停车线上,通过实测的饱和度值来选择不同的信号周期、绿信比、相位差,从而达到实时控制交通信号灯的目的. 目前国内主要交通信号控制系统有青岛海信的HICON系统和深圳的SMOOTH系统,这些系统凭借着价格优势广泛应用于国内城市的交叉路口,用于缓解城市的交通状况[1].
目前信号灯控制方式主要可分为三大类:固定配时控制、感应式配时控制、自适应配时控制. 固定配时控制方法是采集历史的交通流量数据计算出不同相位需要的配时,该方法假设整个信号周期内通行需求是保持不变的. 而实际情况不同时间段的通行需求往往在不断地变化,因此固定配时控制方式远远不能满足实际通行的需求. 感应式配时控制方法通过感应线圈等获取车辆的信息,采用简单的逻辑来做出信号控制决策. 目前大部分自适应配时控制方法依靠一些传感器如(摄像头、感应线圈)来获取车辆的状态信息,从而自适应调节交通信号灯的配时[2]. 但这些传感器存在以下缺点:①只能检测出车辆在某一固定点的状态信息(如位置、速度、加速度). 而车辆是在不断的运动. ②维护成本高. 当某一个方向的传感器出现故障时对整个系统的性能造成很大的影响. 前面提到的SCOOT系统、SCATS系统等都采用上述传感器实现自适应配时控制方式,但是这些自适应配时控制系统不支持网联车辆的信息接入.
随着无线通信技术的发展,网联车辆可通过DSRC、LTE- V等通信方式与其他车辆通信(V2V)、与道路基础设施通信(V2I). 通过利用V2I技术可获得整个交叉路口完整的实时的车辆状态信息(如位置、速度、加速度等). 安装在交叉路口的路侧单元(RSU)通过利用这些车辆的实时状态信息,可做出更优的信号配时策略. 目前有越来越多的学者在研究V2X(包含了V2V,V2I,V2N)通信技术对交通信号控制的积极作用. Yiheng Feng等[3]研究表明:当1辆网联车或者部分网联车由于通信故障不能与道路基础设施通信时会导致道路网联车的渗透率下降,但是不会对路口的信号控制造成很大影响,这样就可避免传统的自适应配时方法因为单个传感器出故障导致整个系统不能正常运行的缺陷. Chen Cai等[4]在论文中提出的方法通过V2I通信方式获取车辆的位置和速度数据,通过动态规划的方法控制红绿灯使得车辆的行程时间最短. 论文[5-6]提出通过交叉路口的的车辆与车辆之间的通信(V2V)形成1个自组织交通信号控制系统,该自组织系统采用虚拟红绿灯替代实体红绿灯从而增加整个路口的交通流量. 目前还有学者提出采用强化学习的方法来实现交叉路口的信号灯控制,从而减少车辆的排队长度[7-8]. 针对未来网联车辆数量越来越多的情况,如何利用V2X通信技术优化路口的信号配时、提升路口的通行效率、降低车辆在路口的等待时间、提升人们的出行体验是未来需要解决的问题,针对上述问题本文提出了基于实时网联车辆信息的交叉路口信号配时优化方法.
1 基于V2I的交叉路口信号控制
普通的十字交叉路口的相位(见图1)根据交通流的方向一般可分为4个. 传统的交叉路口动态配时方法通过在进入交叉路口的上游路段某一固定位置设置感应线圈来检测车辆. 本文提出的基于V2I的交叉路口信号控制方法是在交叉路口红绿灯杆上的路侧感知单元(RSU),它能与安装在车辆上的车载单元(OBU)通过DSRC/LTE- V通信. RSU可通过信号控制机来控制红绿灯的相位. RSU与OBU之间的通信方式为广播通信. RSU可获取整个交叉路口车辆的实时状态信息. 文中的交叉路口每个方向包含1个直行车道、1个左转车道. 每个方向右转车道对应的红绿灯一直为绿色常亮,本研究暂不考虑右转车道对交叉路口交通流的影响. 对交叉路口的交通流进行相位划分时有通行冲突的交通流是不能划分成一组,基于上述原则,单个十字交叉路口可分为4个相位:南北直行、南北左转、东西直行、东西左转.

图1 交叉路口车道示意图
2 神经网络及遗传算法简介
自1980年开始人工神经网络得到快速发展,它通过模拟人的生物神经系统,使得神经网络具备联想记忆、非线性映射、分类识别和优化计算等能力. 目前神经网络广泛应用于信息处理、自动化、工程、经济、医学等领域[8]. 人工神经网络根据结构可分为前馈神经网络、反馈神经网络. 典型的3层前馈神经网络结构如下:
在前馈神经网络中隐含层接收输入层的结果并输出至输出层,整个神经网络中并未有反馈,一种单向多层结构,每一层包含多个神经元,同层的神经元之间没有互相连接. 典型的前馈神经网络有BP神经网络和RBF神经网络. 交叉路口的交通流具有很强的随机性和非线性,很难用精确的数学模型进行表示,而神经网络具有较强的非线性映射能力[9],因而适应于交通信号的配时控制.
遗传算法自从20世纪六七十年代由美国Michigan大学的John Holland与其同事和学生提出来,到目前为止已经形成了完整的理论和方法. 遗传算法的基本思想是随机生成初代种群,按照适者生存和优胜劣汰的原理,逐代生成更优解. 在每一代种群中根据个体的适应度大小挑选个体,并通过遗传学的遗传算子进行组合交叉和变异,生成出新的种群. 通过上述过程下一代种群通过自然进化比前一代种群更加适应环境,末代种群中的最优个体经过解码可作为问题的最优解[10].
遗传算法的主要流程如下:
1)随机生成1组初始种群;
2)计算种群中每个个体的适应度函数;
3)根据个体的适应度函数值来决定哪些个体能保留;
4)将保留的个体采用交叉和变异的方法生成新的种群;
5)返回步骤2)直至停止的条件满足.
由于遗传算法适用于解决全局优化问题,允许使用非常复杂的适应度函数,传统的神经网络的训练方法容易在优化过程中陷入局部最小,而遗传算法是一种类全局最优方法,将遗传算法与神经网络结合起来,不但能发挥神经网络的非线性映射能力同时可使得神经网络能很快地收敛. 因而遗传算法在神经网络的训练中得到广泛的应用[10].
3 神经网络配时实现方法
路侧单元(RSU)通过DSRC/LTE- V通信方式与交叉路口的车辆上的车载单元(OBU)通信,从而获取车辆的位置信息和速度信息,通过匹配RSU中存储的交叉路口的地图信息,可计算出交叉路口每一辆车所在的车道,当同一车道离路口停止线车辆的速度都小于5 km/h时,则认定这些车辆正在排队,通过计算该车道最远的排队车辆至路口停止线的距离,可得到该车道的排队长度. 通过上述方式可获得交叉路口每个车道对应的排队长度.
(1)
本文中神经网络的输入为4组红绿灯相位对应的车道的最大排队长度,其计算如式(1).公式中L1,…,L8分别表示十字路口车道1~8的车辆排队长度.I1,…,I4分别表示神经网络的输入.神经网络的输出为4组红绿灯相位对应的绿灯时长T1,…,T4.由于RSU的计算能力不能满足神经网络计算的需求在交叉路口侧增加边缘计算单元(MEC),神经网络和遗传算法的计算在MEC中实现. 整个基于网联的交叉路口动态配时系统的数据流向 (见图2).
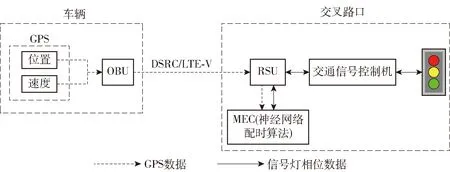
图2 基于网联的交叉路口动态配时系统数据流图
传统的训练神经网络参数的方法有梯度下降法、牛顿法、Levenberg-Marquardt算法、柯西- 牛顿法等. 这些方法通过定义一个目标函数,通过对目标函数进行求导,不断地迭代使目标函数值不断地减少,直至迭代结束找到合适的神经网络的权重和偏置. 对应交叉路口的神经网络动态配时方法,常用的目标函数为交叉路口车辆的行程时间最短、交叉路口车辆的等待时间最短、交叉路口的排队长度最短等. 这些目标函数与交叉路口的不同相位的绿灯时长之间存在复杂的非线性关系,不能用精确的数学公式表示,因而不能通过对上述目标函数求导获取配时所对应神经网络的权重和偏置. 上述原因导致常规的训练神经网络的方法不能对交叉路口配时神经网络进行训练. 由于遗传算法不需要对目标函数进行求导,本论文通过遗传算法来训练神经网络的权重参数.
4 仿真结果
为了验证本论文提出的方法,交叉路口交通流仿真通过SUMO实现,仿真效果图如图3所示. SUMO是一款开源微观交通流仿真软件,它能有效地模拟十字交叉路口的交通流. 本次研究设置交叉路口的南北方向和东西方向对应的车流量约为400 pcu/h,南北左转和东西左转对应的车流量约为200 pcu/h. 选取的仿真时长为1 h,在1 h内车辆出现的方向是随机的. 交叉路口红绿灯的配时算法在MATLAB 2018b中实现. 遗传算法训练前馈神经网络参数通过GOAT工具箱实现. 整个仿真系统的框架如图4所示. 在仿真系统中每隔1个红绿灯周期获取1次整个周期内不同相位对应车道的最大排队长度,通过配时计算出下一周期不同相位绿灯时长. 本次实验所有的实验车辆都为网联车辆,路侧的RSU可实时获取道路上所有网联车辆的位置、速度等车辆信息.

图3 SUMO仿真效果图
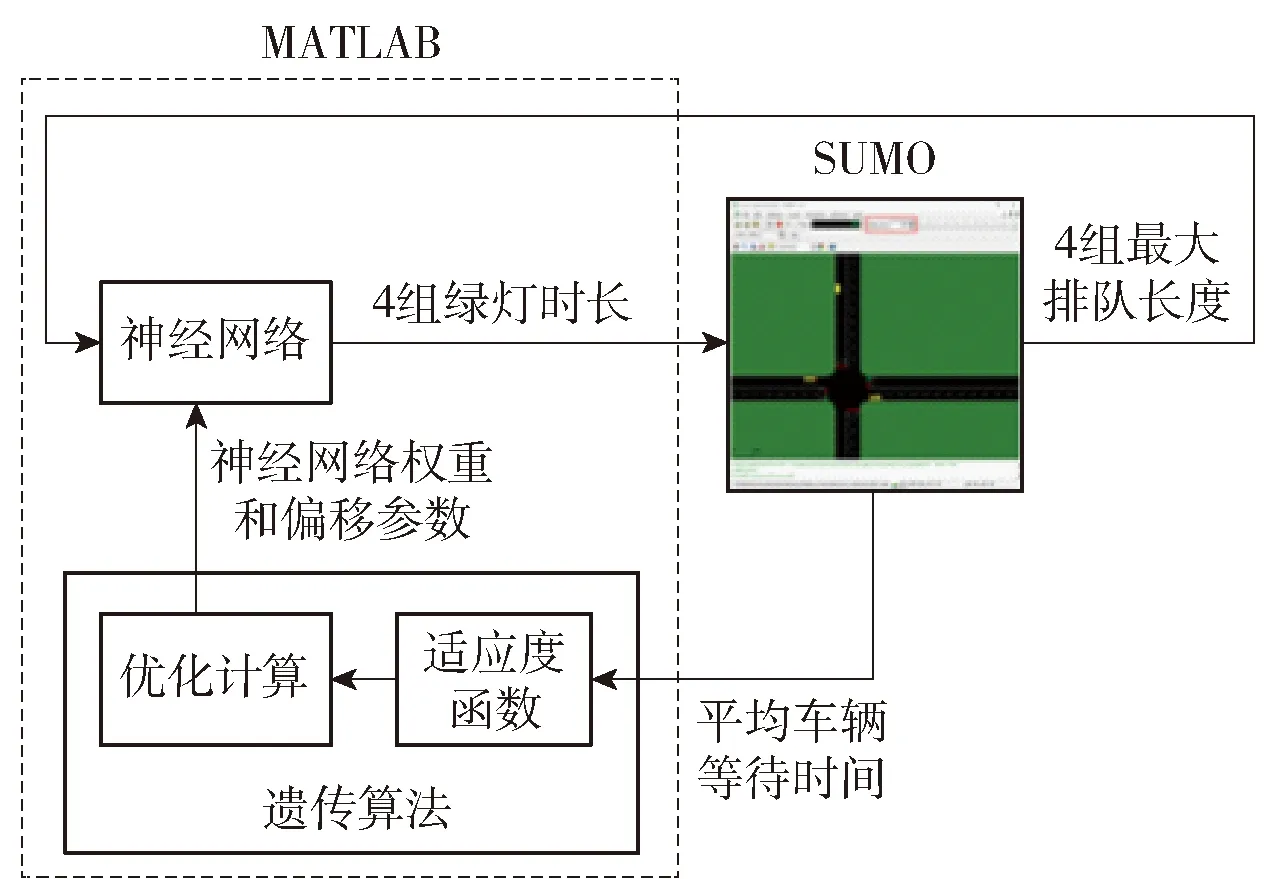
图4 动态配时仿真框架图
文中神经网络的参数设置见表1和遗传算法的参数设置见表2.
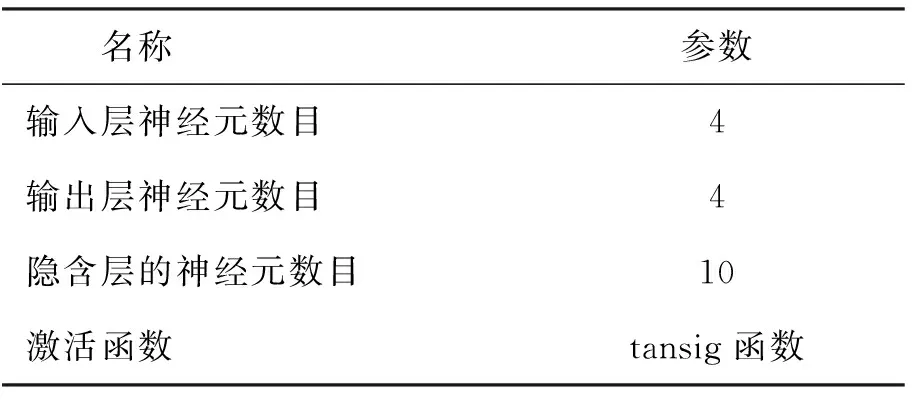
表1 前馈神经网络的参数
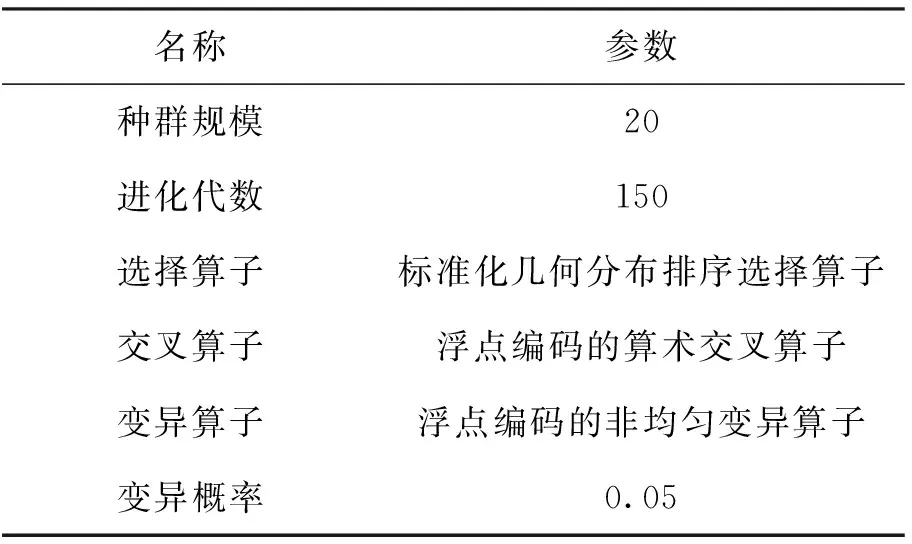
表2 遗传算法的参数
为了对比采用遗传算法优化神经网络参数的动态配时方法的效果,本论文选择两种不同适应度函数.
适应度函数1如式(2)所示
(2)
适应度函数2如式(3)所示
(3)
式中Tω表示交叉路口平均每辆车的等待时间.
本文提出的动态配时方法与固定配时方法的效果对比见表3. 其中固定配时方法根据韦伯斯特公式计算出东西直行和南北直行的绿灯时长为42 s,东西左转和南北左转对应的绿灯时长为22 s,对应的周期时长为140 s. 遗传算法是根据上一周期的车辆排队长度来计算下一次的配时方案,因此其在仿真过程中的计算的配时方案是在不断地调整. 通过SUMO仿真可得到仿真过程中不同的配时方法计算出平均车辆等待时间见表3.

表3 不同配时方法的车辆平均等待时间对比表 s
由表3可得到与固定配时方案对比,选用适应度函数1的神经网络配时方案能减少7.45%平均车辆等待时间;选用适应度函数2的神经网络配时方案能减少5.53%平均车辆等待时间.
5 结束语
本论文通过V2I技术构建了单个十字交叉路口基于网联车辆信息的信号灯动态配时方法,该方法通过网联车辆的信息计算出路口的排队长度做成神经网络的输入,不同相位的绿灯时长作为神经网络输出,并通过遗传算法优化神经网络的参数. 最后搭建了SUMO、MATLAB联合仿真验证平台用于验证本论文提出的信号配时方法的有效性. 仿真实验结果表明:采用遗传算法优化神经网络的动态配时方法能减少十字交叉路口的平均车辆等待时间.
