基于智能手机压电基片上微液滴位置分析
2022-05-13武夷学院微电子系福建武夷山354300
章 安 良(武夷学院 微电子系,福建 武夷山 354300)
0 引言
微流系统因其具有生化试剂消耗量小,分析时间短及人为引入误差小等优点而得到研究,并被广泛应用到很多领域[1-2]。与连续微流体相比,数字微流体(微液滴)[3-4]具有更小的试剂消耗量,操作便捷、简单等优点[5]。确定微液滴位置是微流分析的重要前提,是完成其混合、反应等微流操作的必要条件[6-7]。
已有专家开展了微液滴位置分析研究,并报道了多种检测微液滴位置的方法。如Miguel Angel Murran等[8]提出通过获取相邻两电极电容比率来动态确定基片上微液滴位置。Yiyan Li等[9]提出并设计了电容敏感电路进行基片上微液滴位置检测,并采用200 V、 500 Hz的调制脉冲电压进行3 μL微液滴在基片上输运和定位实验。Shiraz Sohail等[10]在传统的基于介电电润湿(EWOD)原理基础上设计器件结构,通过电极输出电压检测微液滴位置。上述微液滴操作及定位方法可有效实现微液滴位置分析,但需外加控制和检测电路,增加了微流分析成本。
压电微流系统是建立在压电基片上的数字微流系统[11-12],它充分应用声表面波(SAW)的微流驱动能力,快速发展并成为微流分析领域的一个重要分支[13]。微液滴可在压电基片上实现输运、混合、萃取、分离及分裂等微流操作[14-15],主要通过检测叉指换能器(IDT)对上振荡频率的变化来确定微液滴在压电基片上的位置[16-17]。该方法需要外加放大电路,以便与IDT对构成振荡电路,通过振荡频率变化量检测微液滴位置。随着IDT对增加,外电路复杂度及分析成本也增加,但有进一步改进的空间。本文提出了在压电基片上基于智能手机的微液滴位置检测方法,它不需外电路,降低了分析成本。
1 实验
1.1 SAW驱动微液滴原理
SAW是压电基片上传播的弹性波,它由施加了合适频率电信号的IDT激发。IDT激发SAW强度由施加于其上的电信号功率决定。当压电基片上SAW遇到微液滴时,在IDT上产生声辐射力,驱动微液滴沿SAW传播方向运动。SAW驱动微液滴示意图如图1所示。
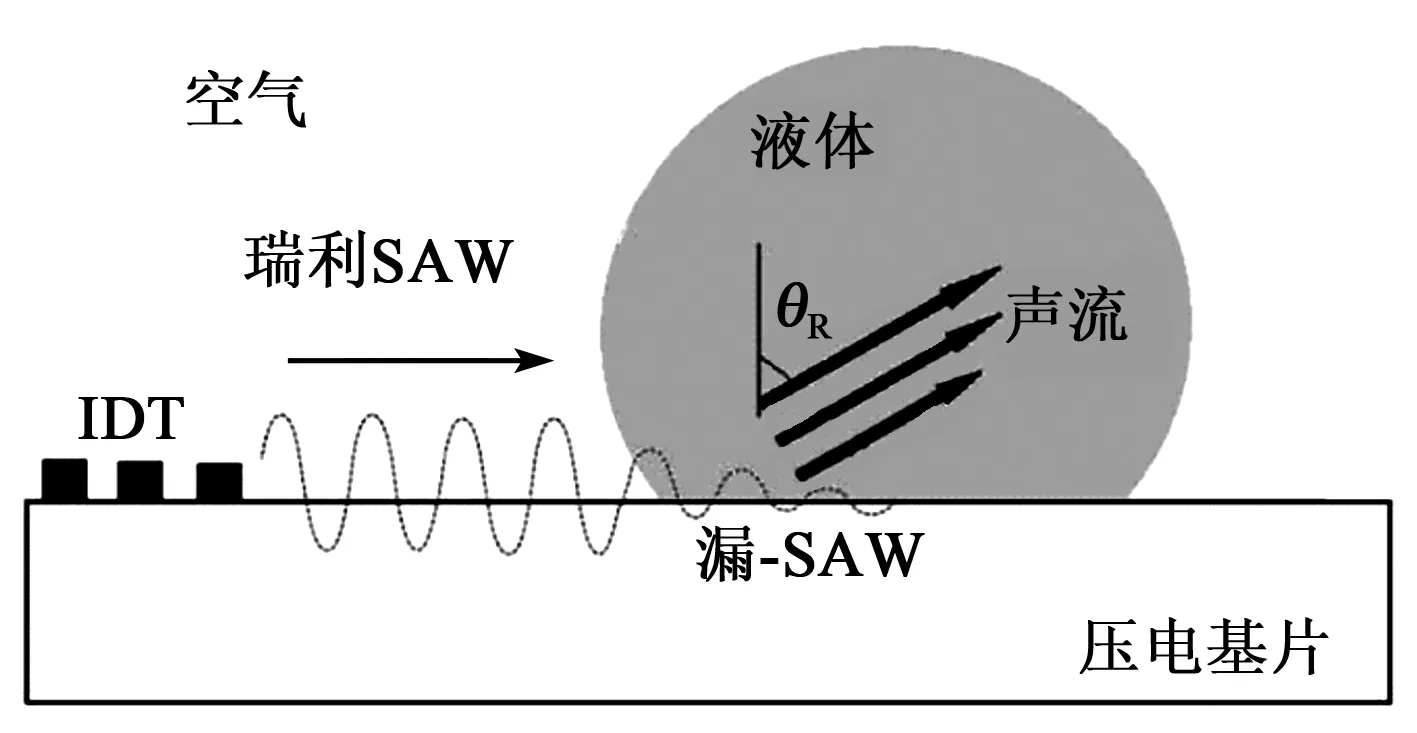
图1 声表面波驱动微液滴示意图
图1中,SAW遇到压电基片上微液滴,以瑞利角θR向微液滴辐射声流力,驱动微液滴在基片表面运动,为压电微流操作及微流分析提供基础。
1.2 压电基片上微液滴识别及定位算法
为了确定微液滴在压电基片上的位置,首先需要识别压电基片上微液滴,为此,提出了压电基片上微液滴的识别方法。选定区域内的所有像素R、G、B(其中,R表示红色,G表示绿色,B表示蓝色)值,并计算其平均值为
(1)
对于满足像素平均值小于一定阈值(目标微液滴像素均值)的像素点,结合坐标,将数据元素(xi,yj, avgRGB(i,j))存储于对象集合Apiexl{}中。对集合Apiexl{}中所有对象元素,计算其坐标距离:
d(k,t)={[Apiexl(k)·x-Apiexl(t)·x]2+
[Apiexl(k)·y-Apiexl(t)·y]2}1/2
(2)
根据距离d(k,t)和集合元素个数可识别压电基片上目标微液滴。
微液滴位置(Lx,Ly)可根据下式确定:
(3)
(4)
式中:Apiexl(m)·x,Apiexl(n)·x分别为微液滴在x方向最小值和最大值;Apiexl(p)·y,Apiexl(q)·y分别为微液滴在y方向最小值和最大值。
结合式(2)、(3)及微液滴输运时间,即可确定压电基片上微液滴输运速度:
(5)
式中:Lx1,Lx2为两个不同时刻微液滴在x方向位置;t为微液滴在两时刻的输运时间。
1.3 app开发
根据所提出微液滴识别和定位算法,采用1 300万高清摄像头,8核CPU的OPPO PBAM00智能手机进行压电基片上微液滴识别、定位的app开发,其测试运行的界面如图2所示。
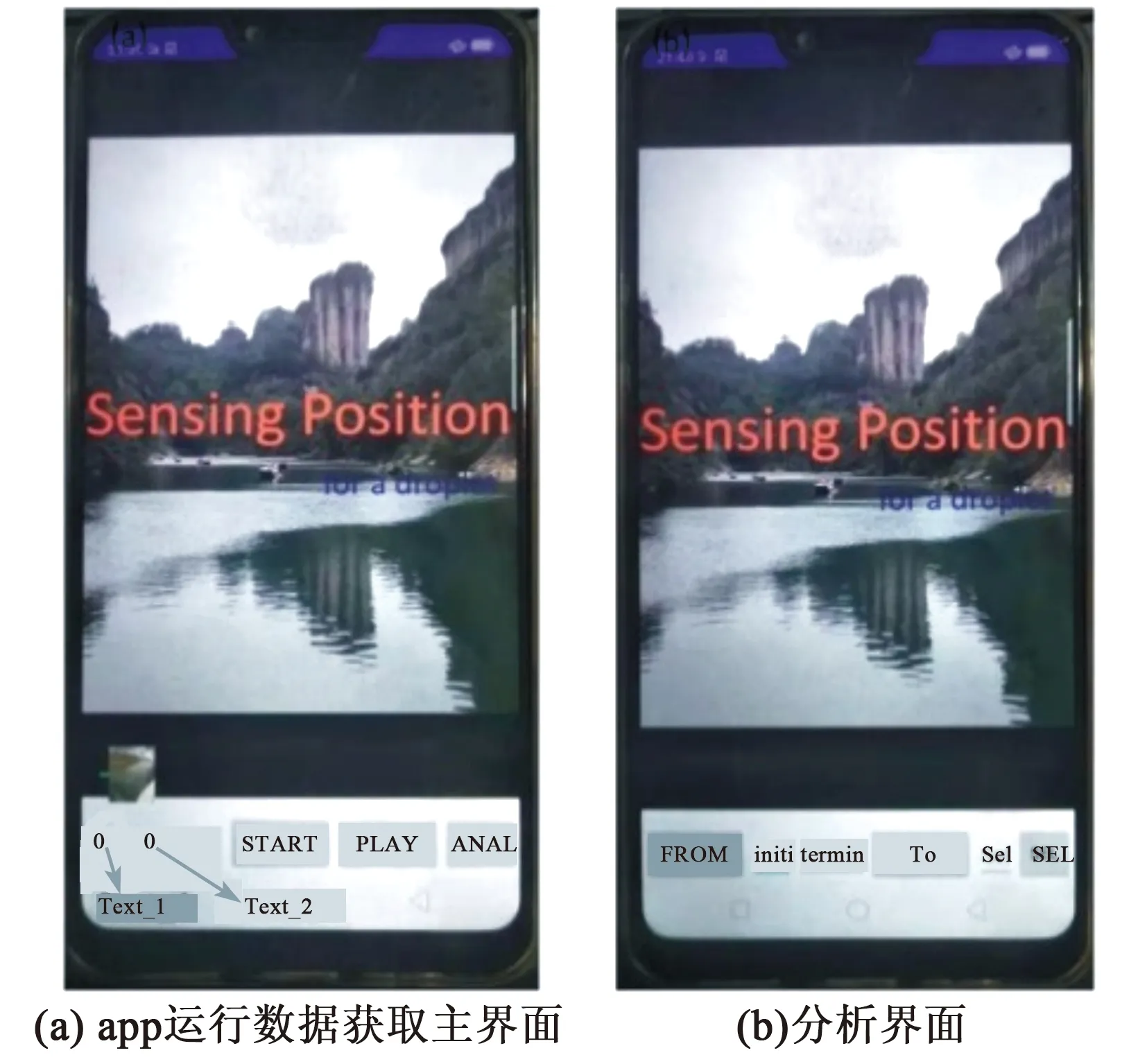
图2 app进行压电基片上微液滴识别及定位的运行界面
图2(a)为app运行后的界面,点击“START”按钮,记录微液滴运行视频,时间长度在Text_1文本框中显示。点击“PLAY”按钮,对记录的视频数据进行播放,播放的当前时间在Text_2文本框中显示。点击“ANAL”按钮,实现各时刻图像数据捕获,为后续分析提供基础。图2(b)界面可进行人为选择不同分析时刻,以便获取不同时刻压电基片上微液滴位置及输运速度。其中,“inti”和“termin”分别为输入开始和结束的分析时间点,点击按钮“FROM”和按钮“To”分别进行开始时刻和结束时刻的液滴识别和位置确定。为了加快分析速度,采用按钮“Sel”选择分析区域。
2 实验结果与讨论
为验证所提出微液滴识别和位置确定方法的正确性,以5 μL黑色墨水溶液微液滴为实验对象,在压电基片的IDT上施加功率为27.5 dBm电信号,驱动黑色墨水溶液微液滴在基片上输运,分析不同时刻微液滴坐标位置和输运速度。图3为输入的开始时刻和结束时刻应用开发的app分析得到的微液滴坐标及此时间段内平均输运速度。图3(a)是单击“Sel”按钮后,选择待分析区域,以提高分析速度。图3(b)是输入的初始时刻(2 s)app完成的微液滴识别及其位置坐标。图3(c)是输入的结束时刻(10 s)app完成的微液滴识别、位置坐标及期间的平均输运速度(约为0.416 mm/s)。
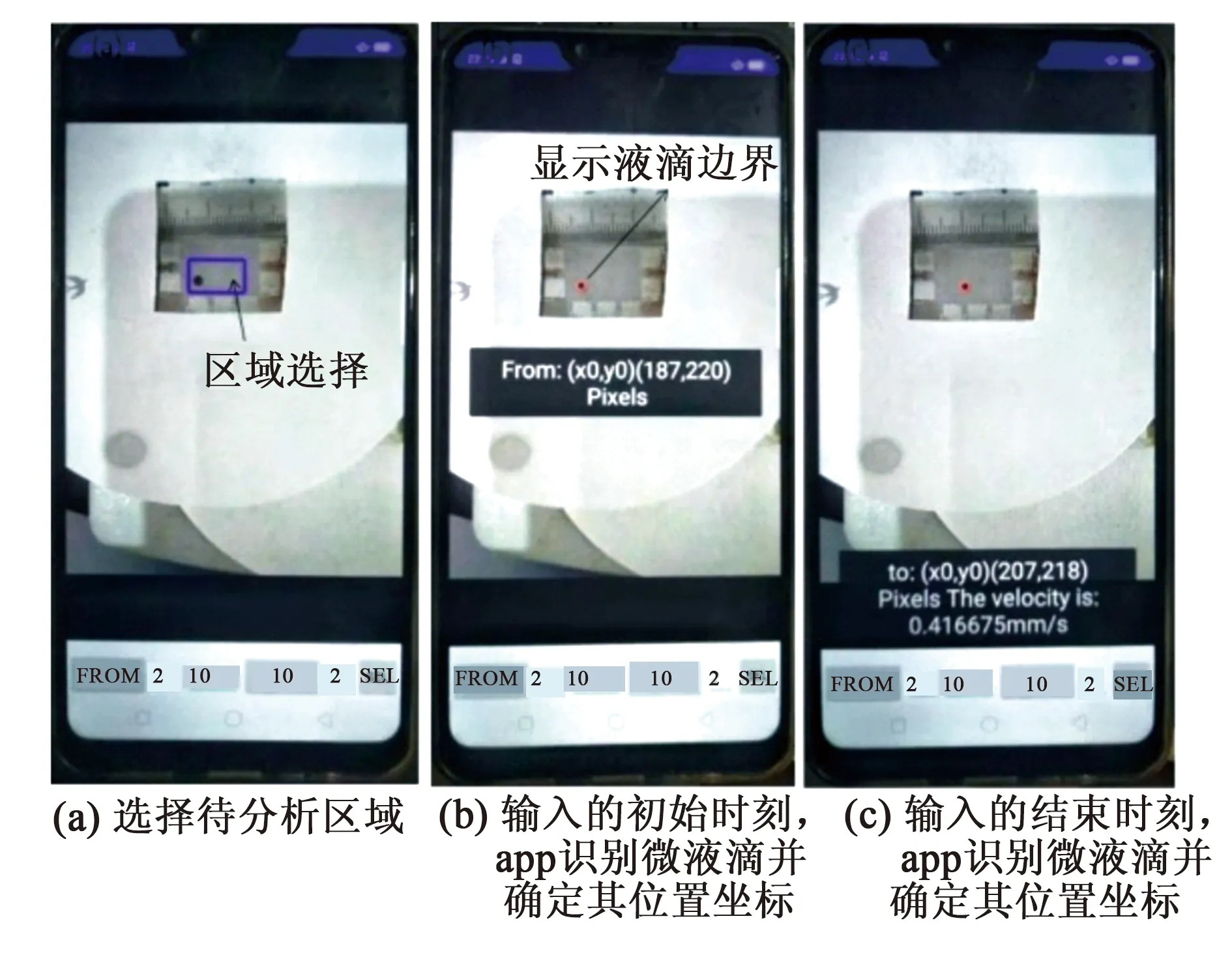
图3 压电基片上微液滴在开始时刻和结束时刻微液滴识别及坐标
由图3可知,识别的微液滴轮廓(红色边界)与微液滴基本重合,验证了所提算法的正确性。为进一步验证所测定位置的正确性,采用图像分析软件对初始时刻和结束时刻的液滴坐标分别进行测量,结果如图4所示。由图可见,图像分析测试结果与自行开发的app分析定位结果一致,验证了所提出微液滴位置测定方法的正确性。
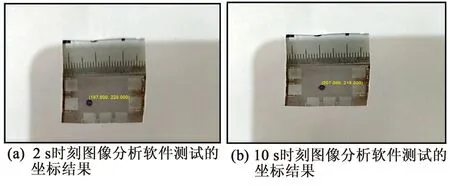
图4 图像分析软件对开始时刻和结束时刻微液滴坐标测量结果
为进一步分析微液滴在分析时间段内输运轨迹,采用开发的app分析了不同时刻微液滴坐标位置,如图5所示。

图5 采用自行开发app测量的微液滴各时刻坐标值
由图5可知,在开始时刻,如2~6 s微液滴x坐标值变化较大,6 s后变化较小,主要原因是SAW幅度随传播距离而发生衰减,同时,信号发生器输出功率略有波动,导致8~9 s间还有一定的输运距离。此外,微液滴在压电基片上纵向方向略有变化,说明压电基片表面疏水层不均匀,使微液滴在纵向方向上发生偏移。
为进一步分析微液滴输运速度,采用开发的app进行不同时间点和不同时间片段的输运速度测量,结果如图6所示。

图6 采用app测量的微液滴各时刻速度值
由图6可知,第2 s作为初始时间,各时刻作为结束时间,其平均速度逐渐减少;而各时刻前1 s作为初始时间,各时刻作为结束时间,则各时刻速度值发生跳变,与图5的微液滴坐标相符。
由图5、6可详细掌握微液滴具体运动轨迹和输运速度,为SAW驱动微液滴的特性分析提供了技术支撑,并为后续压电基片上微流分析提供基础。
3 结束语
本文开发了基于智能手机的压电基片上微液滴识别及位置测定的应用软件,提出了基于颜色信息和微液滴几何信息识别微液滴方法,并进一步确定微液滴动态位置及输运速度。采用黑色墨水溶液微液滴为研究对象,应用自行开发的app进行压电基片上微液滴识别和定位实验,验证了所提出方法和所开发app的正确性。
