基于道钉中心点定位的几何特征扣件定位算法
2022-05-09曹义亲周一纬
曹义亲,易 湖,邱 沂,周一纬
基于道钉中心点定位的几何特征扣件定位算法
曹义亲,易 湖,邱 沂,周一纬
(华东交通大学软件学院,江西 南昌 330013)
针对因轨道图像中图像歪斜、尺寸不一等导致定位失效、精度降低的问题,提出基于道钉中心点定位的几何结构特征扣件定位算法。采用先定位道钉中心点再定位扣件的思想。首先在图像预处理得到边缘图像的基础上,对图像边缘进行腐蚀与膨胀处理,使道钉边缘具备似圆性,再通过改进Hough变换进行圆形检测定位道钉所处大致区域并进行扩充,然后从原图像中粗提取出道钉区域图像;随后进行边缘检测并采用OpenCV轮廓提取及多边形检测算法精确拟合道钉六边形,计算出道钉中心点;最后根据提出的几何结构特征扣件定位算法计算各顶点的位置,从而实现轨道扣件的精确定位。仿真实验结果表明,该算法定位准确度达99.33%,定位精度达0.997,定位速率为29.8张/秒,优于相关对比算法。同时,在不同的天气条件、道钉腐蚀、道钉遮挡等情况下,新算法具备较好的鲁棒性及一定的抗干扰能力。
扣件定位;道钉定位;轮廓提取;多边形检测;几何特征
轨道扣件作为固定钢轨的重要部件,其缺失、断裂、移位等缺陷极大影响列车运行安全,扣件缺陷检测技术有着必不可缺的地位[1]。近年来,人工巡检的方式逐渐被自动检测方式所取代[2]。由于在轨道图像中扣件区域仅占小部分,若对整幅图像直接检测扣件,不仅受图像噪声、光照条件、冗余特征等因素影响,且耗时长、精度低[3-4]。为减少检测耗时并提高精度,先定位后识别成了当下研究的主要技术,轨道扣件定位是轨道缺陷检测领域比较活跃的研究方向[5-6]。
近年来,以图像边缘特征为基础的扣件定位研究取得了不少成果。文献[7]提出“十字交叉定位法”,通过灰度化、Sobel算子、亮点统计定位钢轨与轨枕边界,结合先验知识定位扣件,该方法受图像质量、光照条件等因素影响,定位准确度不高;文献[8]改进了“十字交叉定位法”,通过中值滤波、Canny算子、灰度积分投影法进行定位,其准确率有所提高,但Canny算子对光照条件敏感,算法受阈值选取因素影响较大。上述方法忽略了轨道图像采集过程中的设备而产生抖动,导致钢轨、轨枕与图像边界并非保持垂直,故算法失效。
为提升算法鲁棒性,文献[9]提出Rank变换结合直线段检测(line segment detector,LSD)提取垫板与轨枕接触的边界线进而结合先验知识定位扣件;邬春明和郑宏阔[10]提出改进Census变换、Mean-shift聚类算法、Hough变换提取垫板与轨枕的接触边缘,结合先验知识实现扣件定位,在一定程度上提升了算法的鲁棒性,在垫板与轨枕接触边界模糊、不连续时,定位精度不理想,对图像噪声、伪边缘等因素敏感。为进一步提升算法鲁棒性,邹逸等[11]提出改进Canny算子结合Hough变换直线提取钢轨、轨枕与轨肩边界的扣件定位方法;赵建龙和顾桂梅[12]改进了引导滤波去噪算法并结合灰度积分投影与模板匹配算法定位扣件,降低了图像噪声、光照条件等影响,提高了定位准确率,但定位耗时较长,定位精度有待提高。
基于上述分析,针对图像采集过程中因设备抖动、尺寸不一导致扣件区域图像歪斜、定位失效、精度降低等问题,本文提出基于道钉中心点定位的几何结构特征扣件定位算法。
1 本文算法
1.1 算法设计
轨道图像中扣件区域特征信息繁杂,直接定位扣件易受其他区域图像信息干扰,效果不佳,而道钉区域包含内容单一,边缘灰度值变化明显,道钉、扣件二者之间具有严格的空间几何结构特征关系,故本文提出一种先定位道钉中心点、后利用几何结构特征定位扣件的算法。
本文算法先对待检测图像进行预处理得到边缘图像,随后利用本文设计的算法粗提取道钉区域并精确定位道钉中心点,最后结合几何结构特征法定位扣件,算法流程如图1所示。
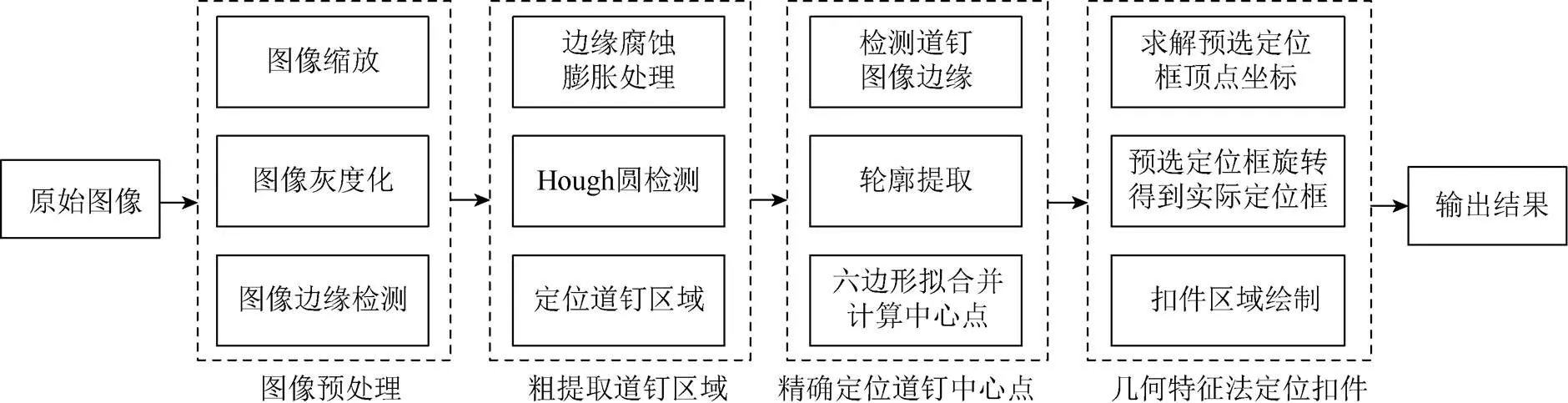
图1 算法流程
1.2 轨道图像预处理
采集到的图像清晰度高、冗余信息多[13],直接进行检测会使运算量徒增,为了降低检测效率,在不影响后续定位的精度下需进行图像缩放处理[14]。采集获取的图像分辨率为2048×2048像素,约每张2 MB,可缩小其分辨率至512×512像素,约每张80 KB,极大降低运算量,提高处理效率。
图像在采集及传输中易受设备性能、外部环境的影响,为了快速有效削弱图像噪声,本文采用高斯滤波进行图像去噪。若直接处理RGB待检测图像的3个分量,对扣件定位效果并没有提升作用,还将加大处理耗时,而图像灰度化能在缩减RGB 3个分量至1个的基础上不影响梯度信息,还降低了处理耗时。为进一步降低噪声的影响并增强边缘细节,本文采用OTSU自适应二值化处理[15],降低了噪声影响,增强了边缘细节。
上述操作得到的图像仍包含噪声点与伪边缘像素点,为降低其影响,本文采用改进Canny算法[16]对图像进行边缘检测,弱化伪边缘影响,较好提取出道钉边缘,最终的预处理效果如图2示。
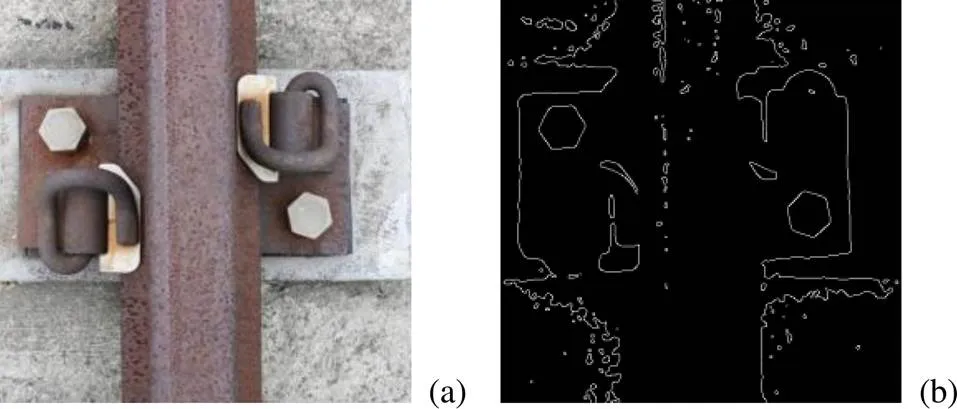
图2 图像预处理((a)源图;(b)结果)
1.3 道钉区域粗提取
预处理后的图像已削弱了噪声的影响,保留了道钉的边缘特征,考虑到道钉中心点精准定位易受其他区域信息的影响,使其定位偏移、定位错误,影响最终扣件定位准确率。为此,本文先粗提取道钉区域,再检测其边缘,随后精确拟合道钉六边形,进而精准定位道钉中心点。粗提取流程如图3所示,各阶段结果如图4所示。
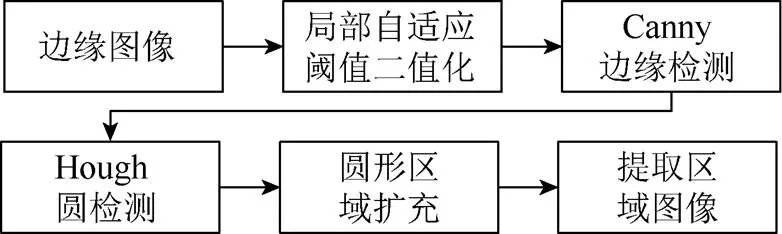
图3 道钉区域粗提取过程
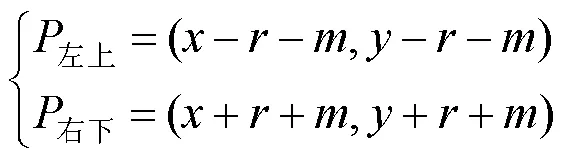
为了使道钉边缘具备似圆性,本文针对预处理得到的边缘图像进行局部自适应阈值二值化操作,结果如图4(b)所示,再利用Canny检测边缘(图4(c))。上述操作使得图像边缘发生腐蚀与膨胀,进而使道钉边缘具备了似圆性,根据该特性,结合已有的改进Hough变换算法[17]进行圆探测。由于受圆弧边缘噪声影响,可能使少量区域存在圆形误判,通过调节圆形半径范围、圆心间距、成圆阈值等参数,使得该算法能检测出道钉所处圆形区域范围,并有效地去除圆弧边缘噪声。结果如图4(d)所示,扩充结果如图4(e)所示。从原图中截取得到道钉区域粗提取最终结果如图4(f)所示。因所检测的圆形区域仅粗略描述道钉所处大致区域,故需要对该区域进行扩充,使提取的图像完整包含整个道钉。本文通过引入扩充系数,结合道钉拟合圆半径及圆心点坐标(,)计算道钉所处正方形区域各顶点坐标,即
1.4 道钉中心点精确定位
道钉区域粗提取的图像仅包含道钉区域,其灰度化后的图像中道钉边缘灰度值变化极其明显,且剩余区域包含信息少,干扰程度低。本文基于此特性利用Canny边缘检测算法快速检测图像的边缘(图5(a)),得到的结果如图5(b)所示。
分析图5(b)发现,道钉轮廓信息明显,易筛选拟合,故本文结合轮廓提取算法[18]先提取图像中存在的轮廓,通过施加边距、周长、面积约束适应性改进OpenCV中多边形拟合算法对所有轮廓进行筛选拟合,结果如图5(c)所示,进而计算得到道钉中心点,结果如图5(d)所示。
1.5 几何结构特征法定位扣件
轨道图像在采集过程中因设备抖动会出现扣件区域歪斜、尺寸不一等情况,如图6所示。
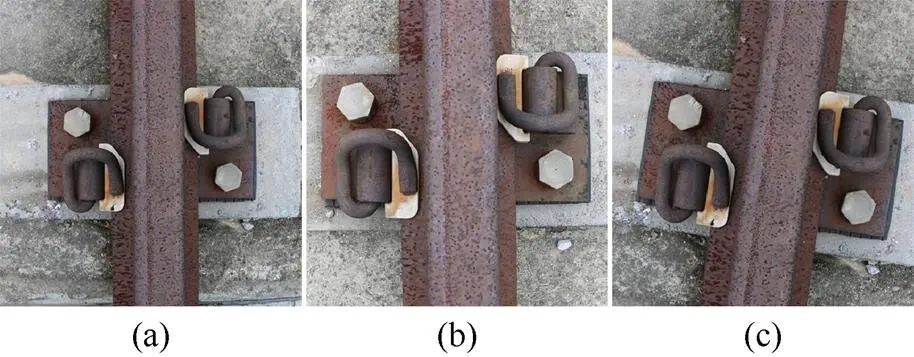
图6 不同状态的轨道图像((a)标准图像;(b)尺寸变化;(c)图像偏转)
由此,现有大部分算法对此类图像进行扣件定位时极易定位失效和不准。通过研究道钉、扣件等各轨道部件间的几何结构发现,轨道各零部件遵循严格的空间位置要求,有着缜密的几何结构关系,如图7所示。
图7(a)提供后续计算推导的超参数,即
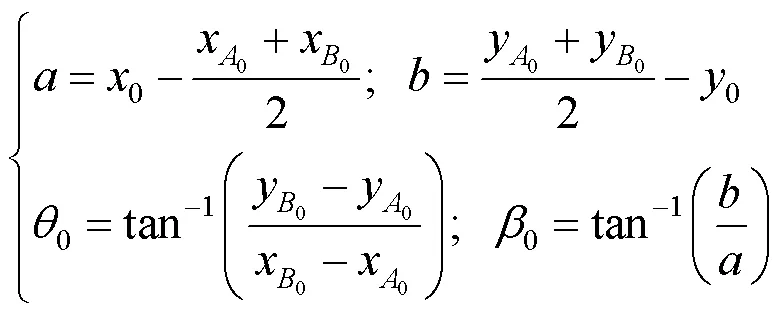
图7 轨道图像几何结构图((a)标准几何结构图;(b)尺寸变化几何结构图;(c)尺寸变化且图像偏转几何结构图)
Fig. 7 Geometric feature map of track image ((a) Standard geometric structure drawings; (b) Geometrical result structure of dimensional variation; (c) Geometrical structure diagram of size change and image deflection)
图7(b)和(c)中,,分别表示左上道钉中心点、右下道钉中心点,1(1,1),2(2,2),3(3,3),4(4,4)与5(5,5),6(6,6),7(7,7),8(8,8)分别表示扣件定位框1和框2各顶点坐标。
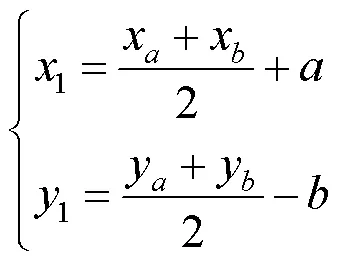
通过分析道钉中心点与扣件区域框各顶点间的空间几何关系发现,在图像标准的情况下,1(1,1)与(x,y),(x,y)满足
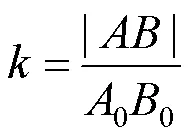
由于采集的图像存在尺寸变化,使得扣件定位框与实际区域不符,如图7(b)所示。本文通过引入比例系数描述待检测图与标准图的尺寸变化关系,即
考虑到图像存在不同程度偏转,使得图像中扣件定位框也发生偏转,如图7(c)所示。通过引入偏转角描述待检测图与标准图的偏转关系,即
式(3)结合缩放比例系数变换为

式(6)结合偏转角变换为
为解决待检测图像扣件区域存在偏转的问题,故预选框需绕点1(1,1)进行相对应的旋转得到实际定位框。通过几何证明得其旋转角即为偏转角。


2 实验结果与分析
2.1 实验数据
实验采用的轨道图像来自华东交通大学图像处理与模式识别研究所实验室数据样本库,整理分类得到样本集Set01,其中标准图像、尺寸变化图像、偏转图像、既图像偏转且尺寸变化等样本各300张,共1 200张,其用作验证算法的有效性。通过从样本库随机抽取得到样本集Set02,其中晴天、阴天、雨天图像各300张,共计900张,其用作验证算法的准确性、精确性和时效性。
2.2 参数设定
位框1顶点0(0,0)坐标为(421,129);定位框长0=211,宽0=132。
2.3 度量标准
实验评价标准包括主观评价和客观评价。主观评价即肉眼观测结果图像,以此衡量算法有效性;客观评价采用定位准确率(location accuracy,LA)、平均交并比(mean intersection over union,mIoU)和每秒帧率(frame per second,FPS)分别度量算法定位率、定位精度与定位速率。
LA指正确定位的样本数占总样本数的比例,即
交并比(IoU)[19]指输出定位框C与人工标注定位框G的交叠率,取平均记为mIoU,即

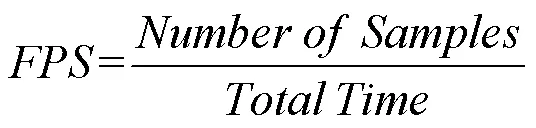
FPS评估算法每秒可以处理的图片数量为
2.4 实验与结果分析
为评价算法性能,选取了改进十字交叉法[8]、Sobel+积分投影[16]、Canny+Hough+积分投影[20]、加权引导滤波+积分投影[12]、Rank+LSD[9]、改进Canny+Hough[11]和改进Census+Hough[10]共7种算法进行对比实验。首先利用实验数据集Set01验证算法的有效性,结果见表1。
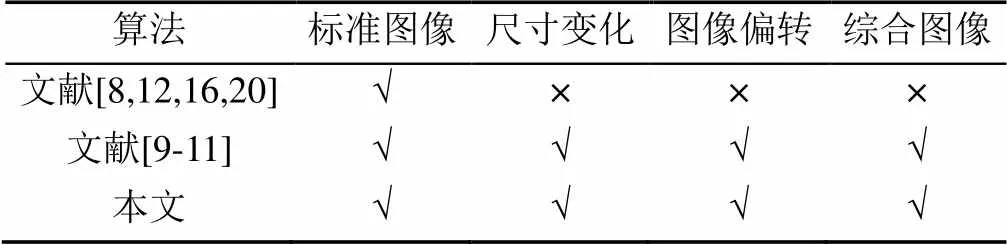
表1 不同算法的定位有效性
表1中,文献[8,12,16,20]算法在图像标准的情况下定位有效,在图像发生偏转或尺寸产生变化时出现了定位失效、定位精度低的问题,原因是上述算法采用了积分投影,通过水平、垂直方向积分投影定位钢轨、轨枕、轨肩边界,图像发生偏转时,三者并非与水平或垂直方向保持对应垂直关系,则算法定位失败;而结合固定先验知识直接定位扣件则未自适应图像尺寸变化,定位精度很低。文献[9-11]算法通过探测轨枕与垫板接触的分界线的定位扣件,具备有效性。
为主观评价各有效算法定位效果,本文利用数据集Set02进行仿真实验,定位结果如图9所示。
由图9可看出,本文算法在晴天、阴天、雨天均具有极好的定位效果,优于其他算法。在雨天,由于光照不足影响边缘特征的提取,雨水的聚集在较大程度上影响垫板与轨枕接触的边界线检测,造成检测的边界线过粗、间断,使得各对比算法定位效果不佳。本文算法中道钉边缘特征虽然受光照条件的影响,但受道钉区域表面雨水堆积影响程度低,因此道钉六边形边缘梯度突变的特性未受本质影响,定位效果较好。
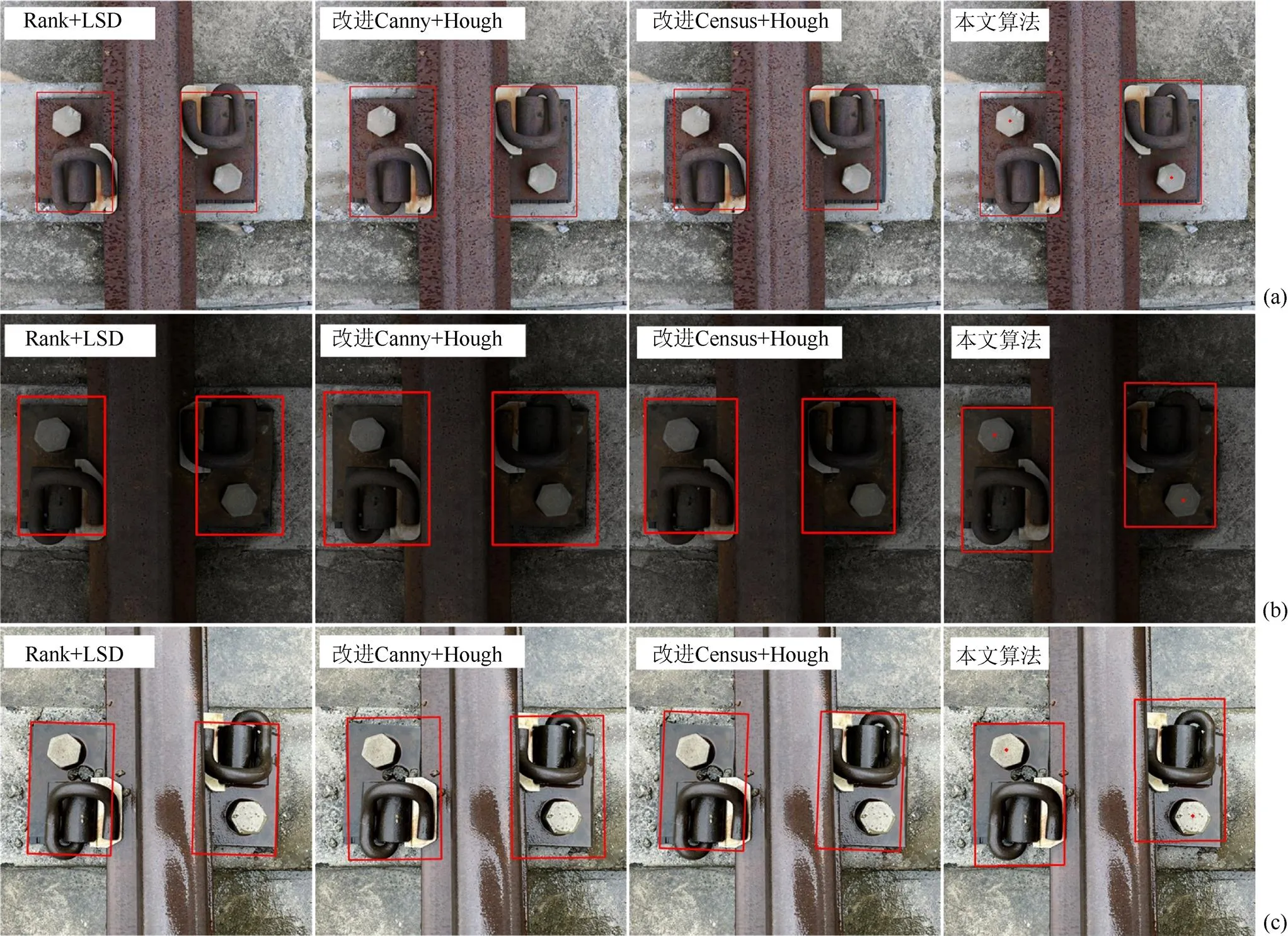
图9 各算法在不同天气下定位结果((a)晴天;(b)阴天;(c)雨天)
为客观评价各算法,本文利用数据集Set02进行仿真实验,统计了各有效算法在各天气条件下的LA,mIoU,FPS。客观评价指标结果见表2。
分析表2可知,本文算法在不同天气光照条件下的LA分别为99.33%,98.67%,96.00%;综合LA为98.00%。在晴天提高了0.60%~3.50%,阴天提高了1.30%~3.00%,雨天提高了0.34%~2.00%,综合提高了1.00%~2.80%。
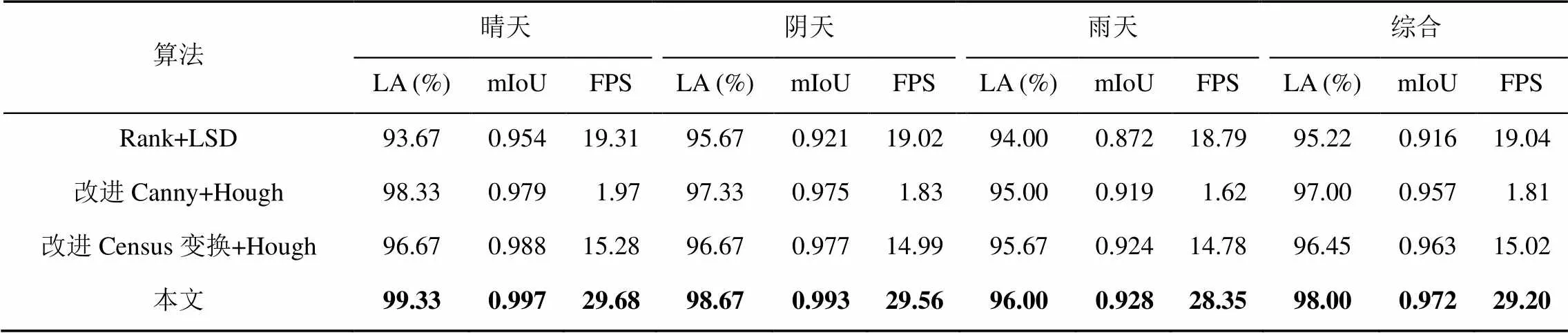
表2 各有效算法的评价指标结果
注:加粗数据为最优值
其他算法在晴天光照条件表现较佳,在雨天则表现略差。因对比算法在雨天条件下,垫板与轨枕接触的边界线易受雨水堆积影响而造成检测出的边界线与实际边界线有较大误差,后续结合先验知识定位扣件进一步放大了误差,造成定位精度下降。仿真实验表明,本文算法在晴天、阴天、雨天条件下皆各优于其他对比算法,在雨天情况下定位精度提高虽不明显,但综合定位精度优于其他算法。
相同设备条件下,改进Canny+Hough定位算法的定位速率最不理想,因该算法对其改进Canny算法的复杂度高,而本文算法采用了OpenCV内置优化好的相关函数,定位速率达29.20张/秒,极大地快于其他算法。
为了对比各算法存在噪声性能受影响程度,同时也为验证本文算法的鲁棒性,特对加噪图像进行了相关对比实验。
在数据集Set02基础上分别对不同天气条件下的图像施加椒盐与高斯混合噪声,得到晴天、阴天、雨天加噪数据集分别为Set03a,Set03b,Set03c样本各300张。定位效果如图10所示,评价指标结果见表3。

图10 各算法在噪声图像下定位结果((a)晴天噪声图像;(b)阴天噪声图像;(c)雨天噪声图像)
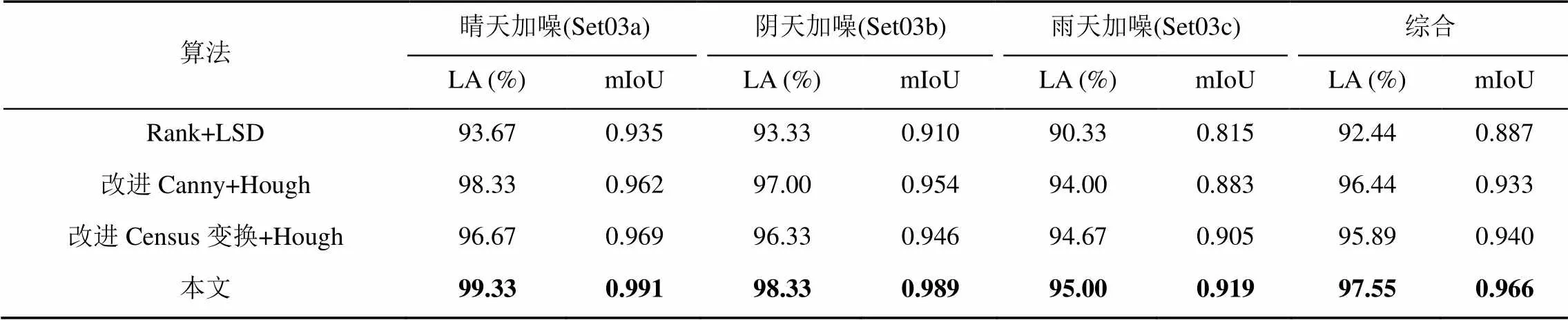
表3 不同噪声图像下定位评价指标值
注:加粗数据为最优值
从图10可以看出,各算法在图像存在较多噪声时定位效果均受到了影响,其中Rank+LSD算法表现最差,因扣件区域图像信息繁杂,出现各种噪声时,极易检测出伪边缘,不利于后续获取垫板与轨枕接触的边界线;另外2种算法通过改进Canny和改进Census变换,在一定程度上削弱了光照、噪声等影响,故受影响程度不大,但其定位区域易出现过大或过小、与实际定位框偏差较大的情况,定位效果总体表现劣于本文算法。
对比表2和表3,各算法的定位准确率和定位精度均有不同程度下降,其中Rank+LSD算法各指标降幅最大,综合定位准确率和定位精度分别下降了2.78%和2.90%;改进Canny+Hough与改进Census变换+Hough算法定位准确率受影响程度较小,但定位精度降幅有待进一步考量;本文算法不仅定位准确性受噪声影响程度低,且定位精度降幅极小,优于其他算法。本文算法采用的先粗提取道钉、后结合几何结构提取扣件的思想,即使整体图像出现了较多噪声,导致扣件区域图像信息繁杂,易受噪声点影响出现虚假的边缘,但道钉区域图像内容单一,受噪声影响程度小,不易出现伪边缘,本文算法依旧能够准确地粗提取出道钉区域并精确地定位道钉中心点。基于几何结构的方式计算各定位框顶点避免了定位性能下降的风险。
由于在实际线路中,道钉区域易出现腐蚀、遮挡等偶然因素,为进一步验证本文算法的抗干扰能力,本文从数据集中整理了道钉区域受不同类型、不同程度干扰的轨道图像进行了实验,结果如图11所示。
实验表明,在轨道图像道钉区域受到各种不同程度干扰时,本文算法依旧能够保持良好的定位效果,说明了本文算法有着较强的抗干扰能力。
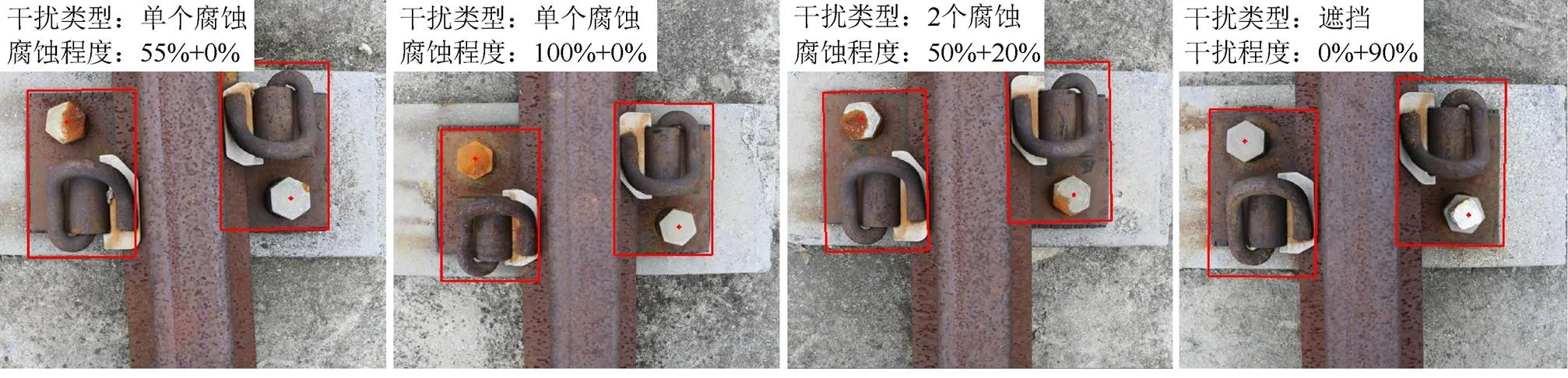
图11 本文算法在干扰图像下定位结果
3 结束语
本文针对扣件定位中存在图像偏转、尺寸变化、光照变化、噪声污染情况下出现的定位失效和精度降低等问题,基于先定位道钉、后定位扣件的思想,提出了一种采用Hough变换、轮廓筛选、六边形探测定位道钉的算法,并提出了基于道钉中心点定位的几何结构特征法定位扣件的新算法,能适应图像的偏转、尺寸变化,定位效果受天气条件变化影响小,在道钉腐蚀、道钉部分遮挡、图像污染时仍能保持良好的定位效果,鲁棒性与抗干扰能力较好。仿真实验结果表明,本文算法在主观评价以及客观评价的定位有效性、定位准确率、定位精度、定位速率等评价指标方面均优于其他算法。
随着研究的深入,道钉的损坏将影响定位效果,单侧道钉损坏虽可由另一侧道钉信息通过先验知识库补全进而定位扣件,而若两侧道钉区域同时出现严重腐蚀、道钉缺失、大面积遮挡、道钉和扣件几何形状发生严重变化,此时算法定位表现较差,虽此类情况在铁路实际运行过程中出现概率极低。后续工作中,将针对这些问题继续进行研究。
[1] ISLAM S, KHAN R A. Clustering and detection of good and bad rail line anchors from images[C]//The 18th International Conference on Computer and Information Technology. New York: IEEE Press, 2015: 222-226.
[2] 王建柱, 李清勇, 张靖, 等. 轨道病害视觉检测: 背景、方法与趋势[J]. 中国图象图形学报, 2021, 26(2): 287-296.
WANG J Z, LI Q Y, ZHANG J, et al. Visual inspection of rail defects: background, methodologies, and trends[J]. Journal of Image and Graphics, 2021, 26(2): 287-296 (in Chinese).
[3] AYTEKIN Ç, REZAEITABAR Y, DOGRU S, et al. Railway fastener inspection by real-time machine vision[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2015, 45(7): 1101-1107.
[4] WEI X K, YANG Z M, LIU Y X, et al. Railway track fastener defect detection based on image processing and deep learning techniques: a comparative study[J]. Engineering Applications of Artificial Intelligence, 2019, 80: 66-81.
[5] 魏秀琨, 所达, 魏德华, 等. 机器视觉在轨道交通系统状态检测中的应用综述[J]. 控制与决策, 2021, 36(2): 257-282.
WEI X K, SUO D, WEI D H, et al. A survey of the application of machine vision in rail transit system inspection[J]. Control and Decision, 2021, 36(2): 257-282 (in Chinese).
[6] 王宇桐. 地铁轨道扣件图像定位和分类方法研究[D]. 北京: 北京建筑大学, 2020.
WANG Y T. Research on positioning and classification method of metro rail fastener image[D]. Beijing: Beijing University of Civil Engineering and Architecture, 2020 (in Chinese).
[7] 范宏. 基于图像的铁路扣件缺陷检测算法研究[D]. 成都: 西南交通大学, 2012.
FAN H. Research of the detection algorithm on railway fastener defects based on image[D]. Chengdu: Southwest Jiaotong University, 2012 (in Chinese).
[8] 吴禄慎, 万超, 陈华伟, 等. 一种改进的十字交叉轨道扣件定位方法[J]. 铁道标准设计, 2016, 60(12): 49-53.
WU L S, WAN C, CHEN H W, et al. An improved cross rail fastener positioning method[J]. Railway Standard Design, 2016, 60(12): 49-53 (in Chinese).
[9] 侯云, 李柏林, 刘甲甲, 等. 基于灰度不变性的扣件定位特征提取方法[J]. 计算机应用与软件, 2015, 32(11): 193-196.
HOU Y, LI B L, LIU J J, et al. Railway fasteners positioning feature extraction based on gray-scale invariance[J]. Computer Applications and Software, 2015, 32(11): 193-196 (in Chinese).
[10] 邬春明, 郑宏阔. 改进Census变换的铁路扣件定位方法[J]. 北京交通大学学报, 2019, 43(2): 58-63.
WU C M, ZHENG H K. Railway fasteners positioning method by improved Census transform[J]. Journal of Beijing Jiaotong University, 2019, 43(2): 58-63 (in Chinese).
[11] 邹逸, 顾桂梅, 张军平. 基于改进Canny算子的铁路扣件定位方法[J]. 兰州交通大学学报, 2019, 38(1): 72-77, 94.
ZOU Y, GU G M, ZHANG J P. The positioning method of railway fasteners based on improved canny algorithm[J]. Journal of Lanzhou Jiaotong University, 2019, 38(1): 72-77, 94 (in Chinese).
[12] 赵建龙, 顾桂梅. 基于引导滤波和积分投影算法的轨道扣件定位[J]. 兰州交通大学学报, 2019, 38(3): 31-36.
ZHAO J L, GU G M. Track fastener positioning based on guided filtering and integral projection algorithm[J]. Journal of Lanzhou Jiaotong University, 2019, 38(3): 31-36 (in Chinese).
[13] FAN H, COSMAN P C, HOU Y, et al. High-speed railway fastener detection based on a line local binary pattern[J]. IEEE Signal Processing Letters, 2018, 25(6): 788-792.
[14] 王宇桐, 许贵阳, 周素霞. 基于垂向定位与灰度投影的地铁扣件定位方法[J]. 铁道建筑, 2019, 59(6): 112-116.
WANG Y T, XU G Y, ZHOU S X. Metro fastener location method based on vertical location and gray projection[J]. Railway Engineering, 2019, 59(6): 112-116 (in Chinese).
[15] YANG L X, FENG Q X. The improvement of bernsen binarization algorithm for QR code image[C]//The 5th IEEE International Conference on Cloud Computing and Intelligence Systems. New York: IEEE Press, 2018: 931-934.
[16] ZHANG X, CHEN F E. Lane line edge detection based on improved adaptive canny algorithm[J]. Journal of Physics: Conference Series, 2020, 1549(2): 022131.
[17] 朱正伟, 宋文浩, 焦竹青, 等. 基于随机Hough变换改进的快速圆检测算法[J]. 计算机工程与设计, 2018, 39(7): 1978-1983.
ZHU Z W, SONG W H, JIAO Z Q, et al. Fast circle detection algorithm based on improved randomized Hough transform[J]. Computer Engineering and Design, 2018, 39(7): 1978-1983 (in Chinese).
[18] Jiang B, Luo R, Mao J, et al. Acquisition of localization confidence for accurate object detection[C]//Proceedings of the European conference on computer vision. Heidelberg: Springer, 2018: 784-799.
[19] SUZUKI S, BE K. Topological structural analysis of digitized binary images by border following[J]. Computer Vision, Graphics, and Image Processing, 1985, 30(1): 32-46.
[20] 罗文婷, 李中轶, 李林, 等. 基于改进Canny算法的道路标线自动识别及定位[J]. 西南交通大学学报, 2018, 53(6): 1253-1260.
LUO W T, LI Z Y, LI L, et al. Automated lane marking identification based on improved canny edge detection algorithm[J]. Journal of Southwest Jiaotong University, 2018, 53(6): 1253-1260 (in Chinese).
Track fastener localization algorithm based on geometric features and the spike center point localization
CAO Yi-qin, YI Hu, QIU Yi, ZHOU Yi-wei
(School of Software, East China Jiaotong University, Nanchang Jiangxi 330013, China)
To solve the problems of positioning failure and accuracy reduction caused by skewedness and nonstandard size of images in the track image, a fastener positioning algorithm based on the spike center point location and geometric structure features was proposed. The new method adopted the idea of first locating the center point of the spike, and then locating the fasteners with geometric features. Based on the edge image obtained by image preprocessing, the edges of track spike in the image would be characteristic of roundness after being corroded and dilated. Then, by means of the Hough transform circle detection algorithm, the rough area of the spike was located and expanded, so that the spike area could be roughly extracted from the original image. The edges of spike area image were then detected and OpenCV, a contour extraction and polygon detection algorithm, was employed to accurately fit the spike hexagon and calculate the spike center point. Finally, the coordinates of each vertex of the fastener bounding box was obtained using the fastener location algorithm proposed based on geometric structure features. The experiment results show that the positioning accuracy of the new algorithm is 99.33%, the precision is 0.997, and the speed is 29.8 fps, superior to the algorithms compared. Meanwhile, under different circumstances, such as weather conditions, spike corrosion, or occlusion, the new algorithm displays better robustness and anti-interference ability.
fastener positioning; spike positioning; contour extraction; polygon detection; geometric features
TP 391
10.11996/JG.j.2095-302X.2022020324
A
2095-302X(2022)02-0324-09
2021-07-19;
2021-09-28
国家自然科学基金项目(61663009);江西省科技支撑计划重点项目(20161BBE50081)
曹义亲(1964–),男,教授,硕士。主要研究方向为图像处理与模式识别。E-mail:yqcao@ecjtu.edu.cn
19 July,2021;
28 September,2021
National Natural Science Foundation of China (61663009);Key Project Supported by the Technology Support Program of Jiangxi Province of China (20161BBE50081)
CAO Yi-qin (1964–), professor, master. His main research interests cover digital image processing and pattern recognition. E-mail:yqcao@ecjtu.edu.cn
